- Затухающие колебания

Содержание
- 5. Рис. 26.1.
- 6. Выясним физический смысл χ и β Обозначим через τ -время, в течение которого амплитуда А уменьшается
- 8. Где ψ = arctg(β/ω). График этой функции изображен на рис. 26.2. Рис. 26.2.
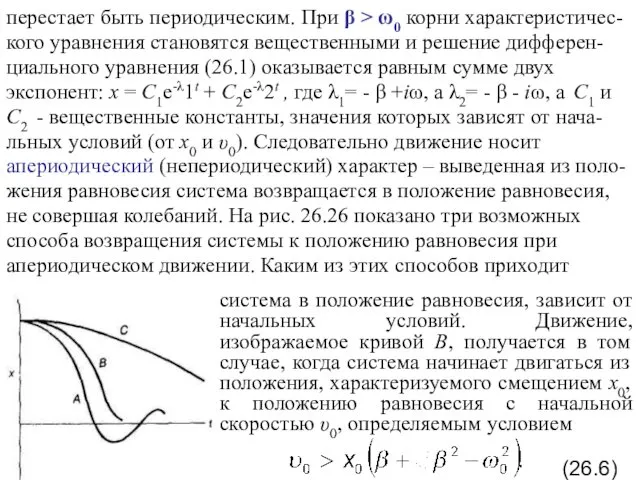
- 10. перестает быть периодическим. При β > ω0 корни характеристичес- кого уравнения становятся вещественными и решение дифферен-
- 11. Это условие будет выполнено в том случае, если выведенной из положения равновесия системе сообщить достаточно сильный
- 14. Рис. 26.27.
- 17. Скачать презентацию
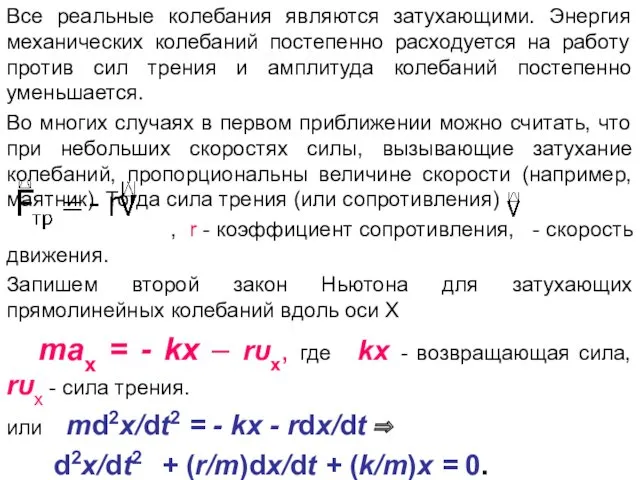
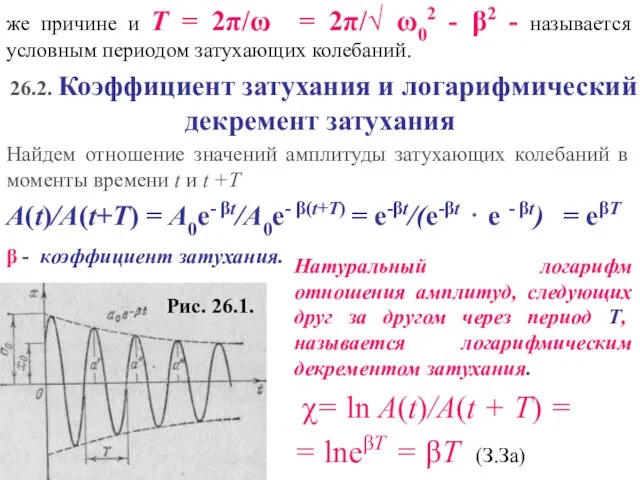
Рис. 26.1.
Рис. 26.1.
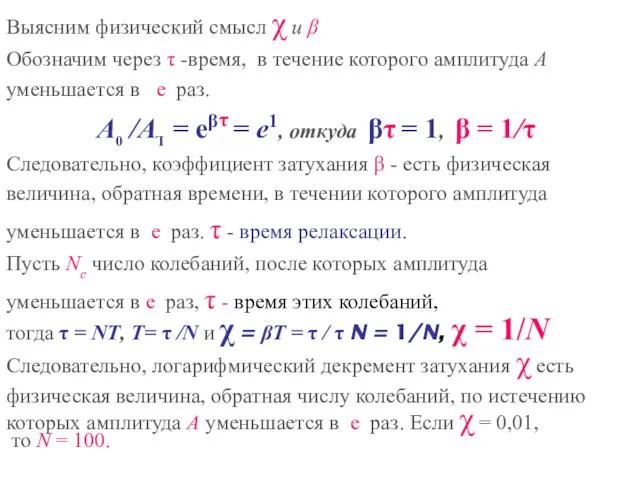
Выясним физический смысл χ и β
Обозначим через τ -время, в течение
Выясним физический смысл χ и β
Обозначим через τ -время, в течение
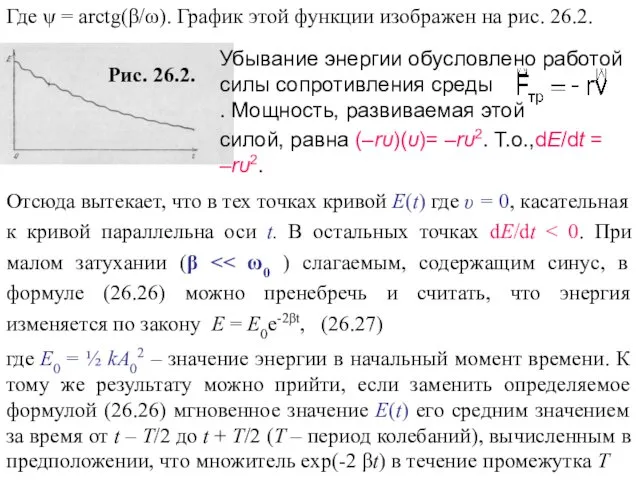
Где ψ = arctg(β/ω). График этой функции изображен на рис. 26.2.
Рис.
Где ψ = arctg(β/ω). График этой функции изображен на рис. 26.2.
Рис.
перестает быть периодическим. При β > ω0 корни характеристичес-
кого уравнения становятся
перестает быть периодическим. При β > ω0 корни характеристичес-
кого уравнения становятся
Это условие будет выполнено в том случае, если выведенной из
положения равновесия
Это условие будет выполнено в том случае, если выведенной из
положения равновесия
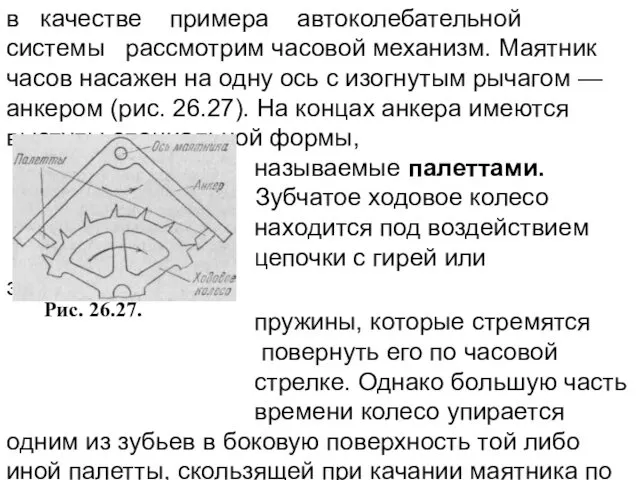
Рис. 26.27.
Рис. 26.27.
 Синтоизм - древняя историческая религия Японии
Синтоизм - древняя историческая религия Японии Правила дорожного движения
Правила дорожного движения Буддизм
Буддизм Население мира 10 класс
Население мира 10 класс Родительское собрание
Родительское собрание Презентация к уроку по географии Реки и озёра Евразии
Презентация к уроку по географии Реки и озёра Евразии Сапр2021_Цикл 1_2
Сапр2021_Цикл 1_2 Русская народная сказка Репка
Русская народная сказка Репка С днём рождения Мариночка
С днём рождения Мариночка Оперативные доступы
Оперативные доступы Трехфазные цепи при соединении нагрузки треугольником
Трехфазные цепи при соединении нагрузки треугольником Управление персоналом в социальной сфере
Управление персоналом в социальной сфере Защита воздушного судна
Защита воздушного судна Жилищный фонд, его виды. Переустройство и перепланировка жилых помещений. Жилищный надзор и жилищный контроль
Жилищный фонд, его виды. Переустройство и перепланировка жилых помещений. Жилищный надзор и жилищный контроль Кальян
Кальян Оптимизация систем электроснабжения и автоматизация технологического процесса котельной станции
Оптимизация систем электроснабжения и автоматизация технологического процесса котельной станции Инсценированное представлени- Сказание о Казанской иконе Божьей Матери.
Инсценированное представлени- Сказание о Казанской иконе Божьей Матери. Проект Русские фольклорные забавы
Проект Русские фольклорные забавы Кадровая политика государства и организации
Кадровая политика государства и организации Мастер-класс Законы золотого сечения в букете
Мастер-класс Законы золотого сечения в букете Заповедные места Зианчуринской земли
Заповедные места Зианчуринской земли Общие сведения по обеспечению войск водой
Общие сведения по обеспечению войск водой Презентация к мероприятию Инсценированная военная песня: песня Катюша.
Презентация к мероприятию Инсценированная военная песня: песня Катюша. Интернет-ресурсы для педагога
Интернет-ресурсы для педагога Социальная сеть Facebook
Социальная сеть Facebook Вантовые покрытия
Вантовые покрытия Назначение и виды обоев. Виды клея для наклейки обоев
Назначение и виды обоев. Виды клея для наклейки обоев Взаимодействие с семьей по физкультурно-оздоровительной работе в МКДОУ д-с Буратино
Взаимодействие с семьей по физкультурно-оздоровительной работе в МКДОУ д-с Буратино