- Биомеханика двигательной деятельности

Содержание
- 2. Действия человека всегда имеют цель, определенный смысл. Человек произвольно, по собственной воле начинает движение, изменяет их
- 3. Двигательные действия формируются при помощи произвольных активных движений различных звеньев тела, вызванных управляемой контролируемой работой мышц.
- 4. биомеханика составлено из двух греческих слов: Bios - жизнь и mexane - механика - это раздел
- 5. Биомеханика двигательной деятельности изучает движения человека в процессе его двигательной активности и физических упражнений. Предметом биомеханики
- 6. общая задача изучения движений человека в биомеханике двигательных действий Изучение движений в биомеханике , в конечном
- 7. частные задачи биомеханики
- 8. Методы регистрации характеристик двигательных действий Методы непосредственного измерения механическими средствами. Методы использования злектротехнических средств ( миографы,
- 9. Методы исследования биомеханики системный анализ это разложение единого целого на составные части При системном анализе полученные
- 10. Биомеханика делится на три части: Статика – раздел биомеханики, который изучает законы для действия сил при
- 11. Опорно-двигательный аппарат Твердую основу двигательного аппарата составляет его костный осевой скелет. Все кости соединяются в скелет
- 12. Механические свойства мышцы Упругость проявляется в возникновении напряжения в мышце при ее деформации под действием нагрузки.
- 13. Функция скелетных мышц состоит в том, чтобы своим напряжением создать силы тяги, приложенные к противоположным местам
- 14. Силы, приложенные к телу и вызывающие его деформации, называются нагрузками. Различают: нагрузки на растяжение, нагрузки на
- 15. Виды нагрузок
- 16. С позиций теории механизмов и машин части тела человека, имеющие подвижные соединения, принято рассматривать как звенья,
- 17. степени свободы движения Движение свободного тела возможно в трех основных направлениях – вдоль осей координат, а
- 18. Кинематическая цепь – это последовательное или разветвленное соединение ряда кинематических пар. Цепь в которой конечное звено
- 19. Рис. 4.3. Кинематические цепи тела: а – виды цепей: bam – незамкнутые, ABCDE – замкнутая на
- 20. Звенья тела, подвижно соединенные в суставах под действием приложенных сил, – могут либо сохранять свое положение,
- 21. Рычаг – это любое твердое тело, имеющее точку опоры (ось вращения) и способное поворачиваться вокруг нее.
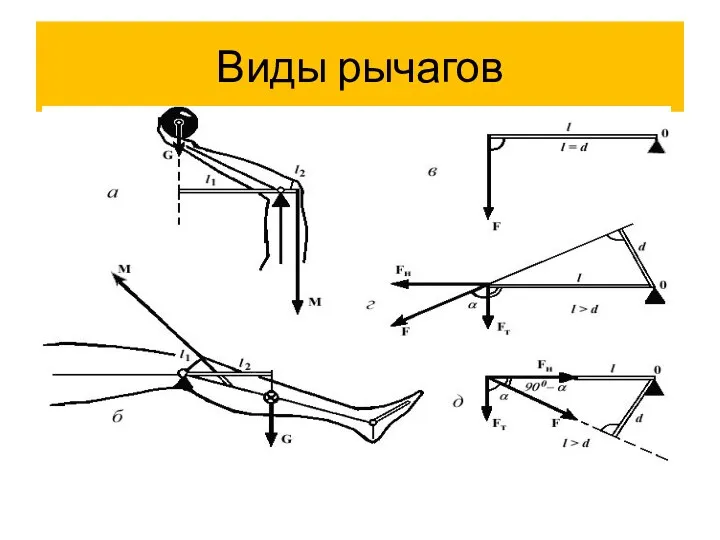
- 22. Примером рычага первого рода
- 23. Виды рычагов
- 24. рычаги третьего рода.
- 25. Золотое правило механики гласит: приобретаешь в силе - теряешь в скорости, приобретаешь в скорости - теряешь
- 26. Положение тела человека определяется: местоположением, ориентацией относительно системы отсчета, позой (взаимным расположением звеньев тела), отношением к
- 28. Виды равновесия твердого тела а) безразличное равновесие – действие силы тяжести не изменяется; б) устойчивое –
- 29. Факторы степени устойчивости
- 30. Сохранение положения тела спортсмена достигается при помощи следующих движений: Компенсаторные движения направлены на предупреждение выхода ЦМ
- 31. Задание к контрольной работе Цель: научиться определять некоторые биомеханические характеристики. 1. С помощью цифровой видеокамеры, цифровой
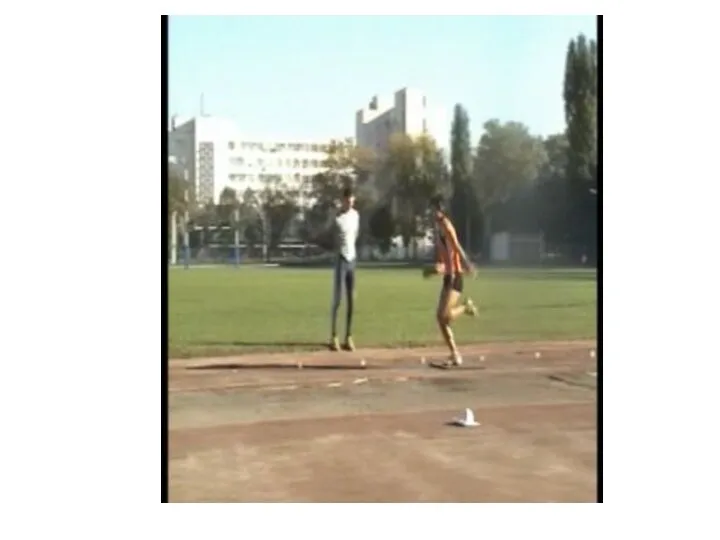
- 32. Ход работы 2. Через компьютер выбрать из отснятого видеоматериала наиболее значимую для результата упражнения позу исполнителя,
- 35. Нахождение координат 3. На фотографии приблизительно отметить 19 основных точек тела человека, провести около позы прямоугольную
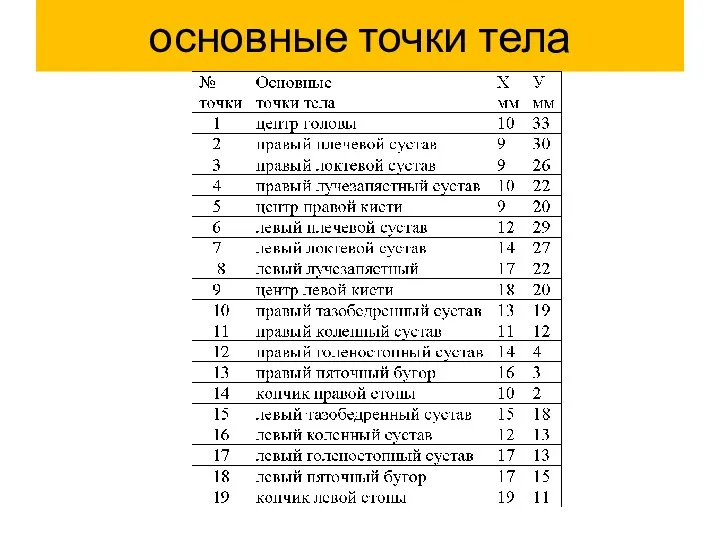
- 37. основные точки тела
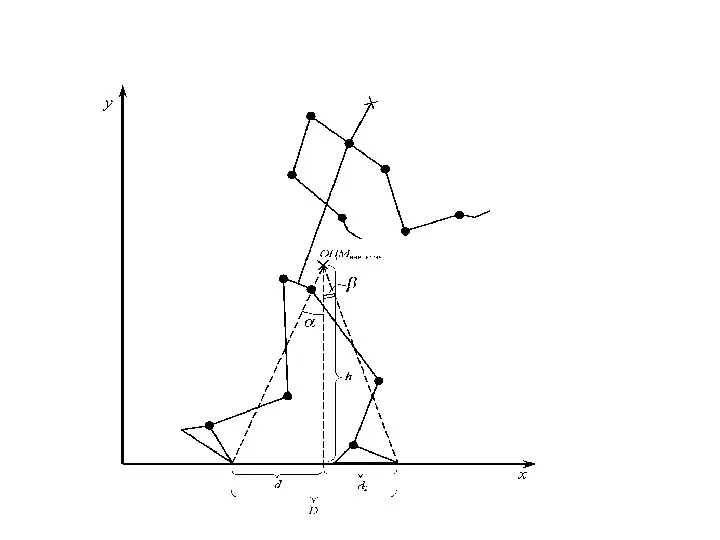
- 38. 4. На пересечении х и у – абсциссы и ординаты каждой из основных точек тела человека
- 39. 5. По предлагаемым формулам ( автор Долгов В.А.) определить координаты центров тяжести ног и центра тяжести
- 40. Общий центр тяжести тела (ОЦТ) Формулы для расчета центра тяжести тела Xоцт=[7*X1+13,63*(X2+X6)+2,57*(X3+X7)+ 0,84*(X4+X8)+X5+X9+16,18*(X10+X15)+ +8,18*(X11+X16)+2,1*(X12+X17)+1,12*(X13 +X18)+0,88*(X14+X19)]/100 Уоцт=[7*У1+13,63*(У2+У6)+2,57*(У3+У7)+
- 41. 6. Найти масштаб анализируемого положения тела Измерив линейкой рост исполнителя на фотографии-h см, определить её масштаб
- 42. 7. По формулам найти вес его ноги и определить, какой процент её вес составляет от веса
- 43. 8. С помощью транспортира измерить в градусах на фото угол ß в коленном суставе любой ноги
- 45. Скачать презентацию
Действия человека всегда имеют цель, определенный смысл.
Человек произвольно, по собственной
Действия человека всегда имеют цель, определенный смысл.
Человек произвольно, по собственной
Двигательные действия формируются при помощи произвольных активных движений различных звеньев тела,
Двигательные действия формируются при помощи произвольных активных движений различных звеньев тела,
биомеханика составлено из двух греческих слов: Bios - жизнь и
биомеханика составлено из двух греческих слов: Bios - жизнь и
Биомеханика двигательной деятельности изучает движения человека в процессе его двигательной активности
Биомеханика двигательной деятельности изучает движения человека в процессе его двигательной активности
общая задача изучения движений человека в биомеханике двигательных действий
Изучение движений
общая задача изучения движений человека в биомеханике двигательных действий
Изучение движений
частные задачи биомеханики
частные задачи биомеханики
Методы регистрации характеристик двигательных действий
Методы непосредственного измерения механическими средствами.
Методы использования злектротехнических
Методы регистрации характеристик двигательных действий
Методы непосредственного измерения механическими средствами.
Методы использования злектротехнических
Методы исследования биомеханики
системный анализ это разложение единого целого на составные части
Методы исследования биомеханики
системный анализ это разложение единого целого на составные части
Биомеханика делится на три части:
Статика – раздел биомеханики, который изучает
Биомеханика делится на три части:
Статика – раздел биомеханики, который изучает
Опорно-двигательный аппарат
Твердую основу двигательного аппарата составляет его костный осевой
Опорно-двигательный аппарат
Твердую основу двигательного аппарата составляет его костный осевой
Механические свойства мышцы
Упругость проявляется в возникновении напряжения в мышце при ее
Механические свойства мышцы
Упругость проявляется в возникновении напряжения в мышце при ее
Функция скелетных мышц состоит в том, чтобы своим напряжением создать силы
Функция скелетных мышц состоит в том, чтобы своим напряжением создать силы
Силы, приложенные к телу и вызывающие его деформации, называются нагрузками.
Силы, приложенные к телу и вызывающие его деформации, называются нагрузками.
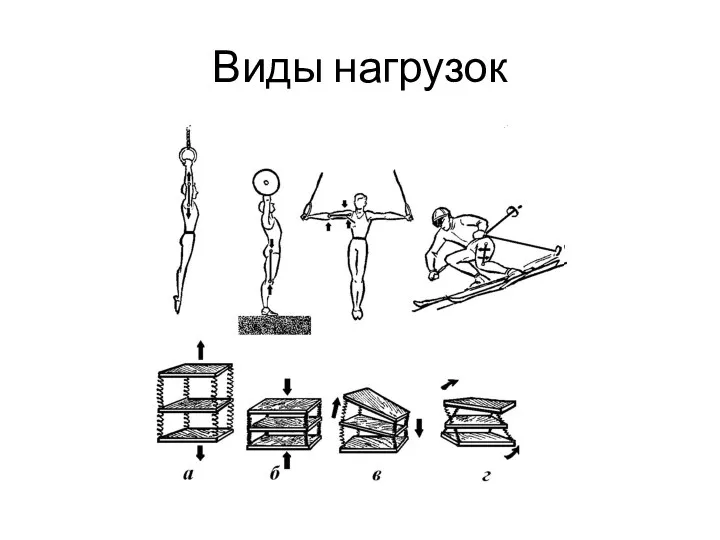
Виды нагрузок
Виды нагрузок
С позиций теории механизмов и машин части тела человека, имеющие подвижные
С позиций теории механизмов и машин части тела человека, имеющие подвижные
степени свободы движения
Движение свободного тела возможно в трех основных направлениях
степени свободы движения
Движение свободного тела возможно в трех основных направлениях
Кинематическая цепь – это последовательное или разветвленное соединение ряда кинематических пар.
Кинематическая цепь – это последовательное или разветвленное соединение ряда кинематических пар.
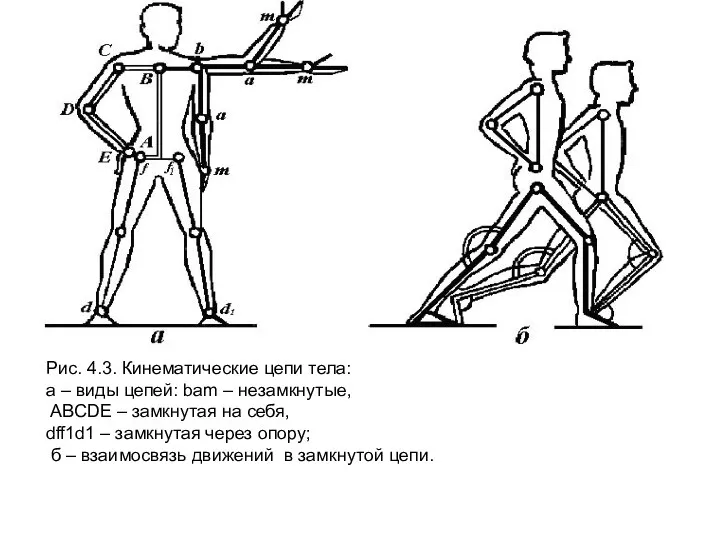
Рис. 4.3. Кинематические цепи тела:
а – виды цепей: bam – незамкнутые,
Рис. 4.3. Кинематические цепи тела:
а – виды цепей: bam – незамкнутые,
Звенья тела, подвижно соединенные в суставах под действием приложенных сил,
Звенья тела, подвижно соединенные в суставах под действием приложенных сил,

Рычаг – это любое твердое тело, имеющее точку опоры (ось вращения)
Рычаг – это любое твердое тело, имеющее точку опоры (ось вращения)

Примером рычага первого рода
Примером рычага первого рода
Виды рычагов
Виды рычагов

рычаги третьего рода.
рычаги третьего рода.
Золотое правило механики гласит: приобретаешь в силе - теряешь в скорости,
Золотое правило механики гласит: приобретаешь в силе - теряешь в скорости,
Положение тела человека определяется:
местоположением,
ориентацией относительно системы отсчета,
позой (взаимным
Положение тела человека определяется:
местоположением,
ориентацией относительно системы отсчета,
позой (взаимным
Виды равновесия твердого тела
а) безразличное равновесие – действие силы тяжести
Виды равновесия твердого тела
а) безразличное равновесие – действие силы тяжести
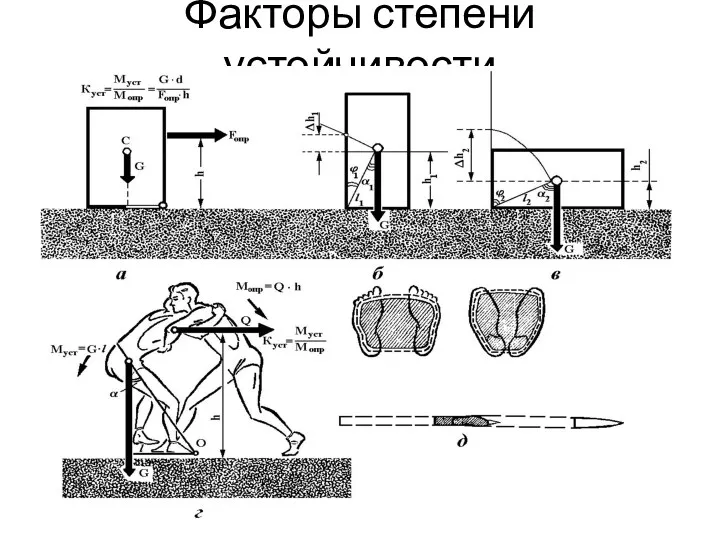
Факторы степени устойчивости
Факторы степени устойчивости
Сохранение положения тела спортсмена достигается при помощи следующих движений:
Компенсаторные движения
Сохранение положения тела спортсмена достигается при помощи следующих движений:
Компенсаторные движения
Задание к контрольной работе
Цель: научиться определять некоторые биомеханические характеристики.
1. С
Задание к контрольной работе
Цель: научиться определять некоторые биомеханические характеристики.
1. С
Ход работы
2. Через компьютер выбрать из отснятого видеоматериала наиболее значимую для результата
Ход работы
2. Через компьютер выбрать из отснятого видеоматериала наиболее значимую для результата

Нахождение координат
3. На фотографии приблизительно отметить 19 основных точек тела человека, провести
Нахождение координат
3. На фотографии приблизительно отметить 19 основных точек тела человека, провести
основные точки тела
основные точки тела
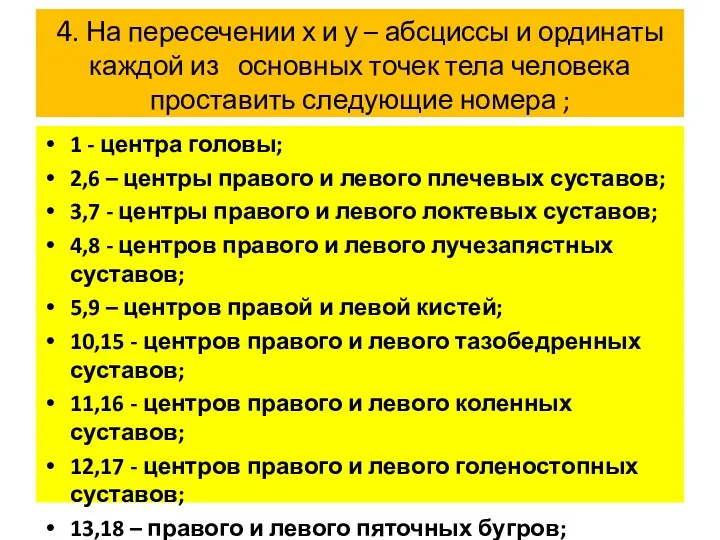
4. На пересечении х и у – абсциссы и ординаты каждой
4. На пересечении х и у – абсциссы и ординаты каждой
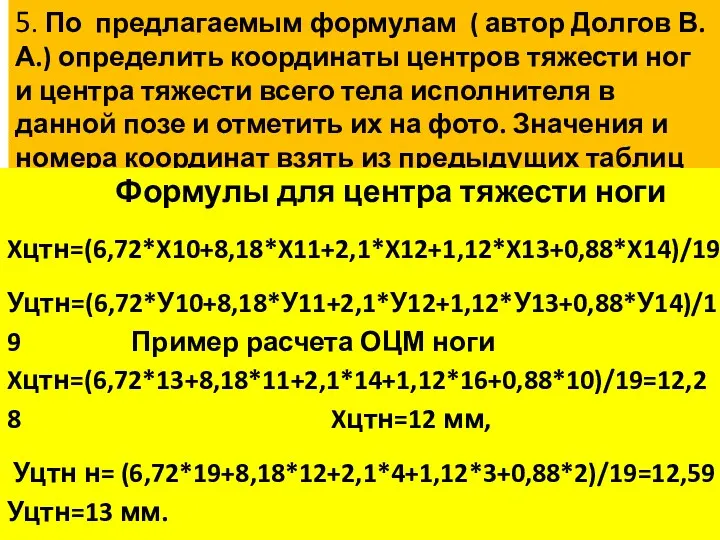
5. По предлагаемым формулам ( автор Долгов В.А.) определить координаты центров
5. По предлагаемым формулам ( автор Долгов В.А.) определить координаты центров
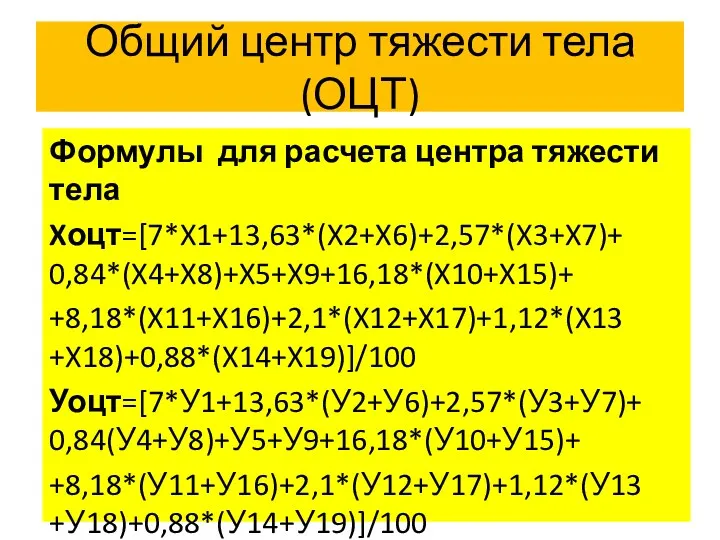
Общий центр тяжести тела (ОЦТ)
Формулы для расчета центра тяжести тела
Xоцт=[7*X1+13,63*(X2+X6)+2,57*(X3+X7)+
Общий центр тяжести тела (ОЦТ)
Формулы для расчета центра тяжести тела
Xоцт=[7*X1+13,63*(X2+X6)+2,57*(X3+X7)+
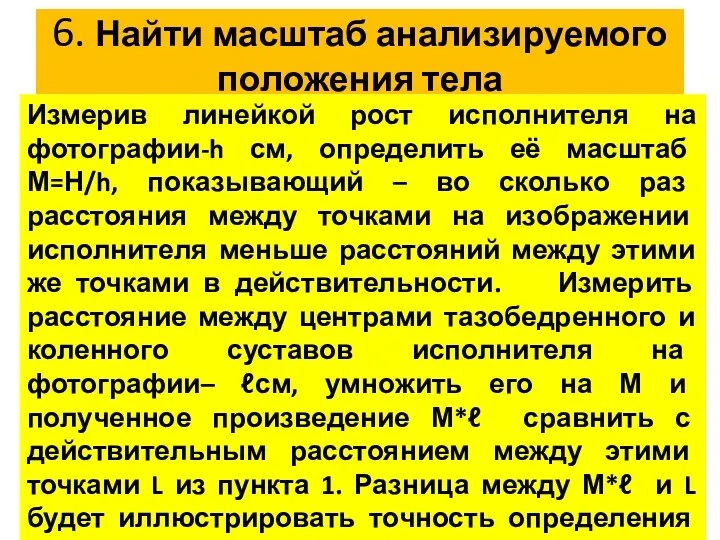
6. Найти масштаб анализируемого положения тела
Измерив линейкой рост исполнителя на фотографии-h
6. Найти масштаб анализируемого положения тела
Измерив линейкой рост исполнителя на фотографии-h
7. По формулам найти вес его ноги и определить, какой процент
7. По формулам найти вес его ноги и определить, какой процент
8. С помощью транспортира измерить в градусах на фото угол ß
8. С помощью транспортира измерить в градусах на фото угол ß
 Тип Плоскі черви. Клас Війчасті черви
Тип Плоскі черви. Клас Війчасті черви Үздікті (үзілісті) қосылыстар, буындар Буын биомеханикасы
Үздікті (үзілісті) қосылыстар, буындар Буын биомеханикасы Имплантация, гаструляция
Имплантация, гаструляция Пищеварительная система человека
Пищеварительная система человека Охрана животных
Охрана животных Отряды млекопитающих
Отряды млекопитающих Выращивание ягодных и плодовых растений. Размножение
Выращивание ягодных и плодовых растений. Размножение Регуляция дыхания
Регуляция дыхания Внешнее строение листа
Внешнее строение листа Экскурсия Разнообразие животных в природе
Экскурсия Разнообразие животных в природе Электрофорез. Типы электрофореза
Электрофорез. Типы электрофореза Методическая копилка
Методическая копилка Структура белковых молекул
Структура белковых молекул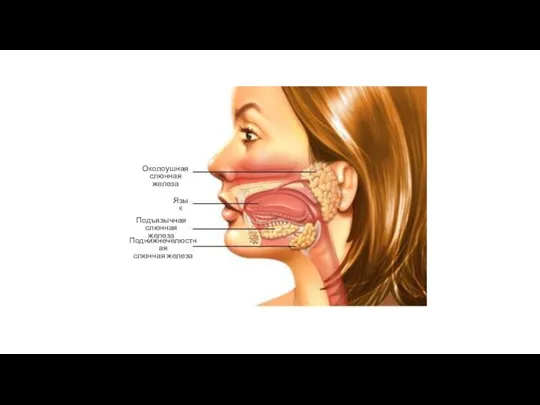 Слюнные железы
Слюнные железы Многообразие пресмыкающихся
Многообразие пресмыкающихся Обмен веществ. Метаболизм Катаболизм (энергетический обмен). Анаболизм (пластический обмен)
Обмен веществ. Метаболизм Катаболизм (энергетический обмен). Анаболизм (пластический обмен) Лекарственные растения
Лекарственные растения Индивидуальное развитие организма (онтогенез)
Индивидуальное развитие организма (онтогенез) Биологиялық ресурстар
Биологиялық ресурстар Направления эволюции
Направления эволюции Біологічні основи ембріонального розвитку організмів. Лекція 7
Біологічні основи ембріонального розвитку організмів. Лекція 7 Анатомия, физиология, патология зрительного анализатора
Анатомия, физиология, патология зрительного анализатора Animal’s world
Animal’s world Царство Бактерии
Царство Бактерии Видоизменение корней у растений
Видоизменение корней у растений Происхождение современного человека. (Тема 3)
Происхождение современного человека. (Тема 3) Наши верные друзья - собаки
Наши верные друзья - собаки Наши помощники – органы чувств
Наши помощники – органы чувств