- Пересечение прямых и плоскостей

Содержание
- 2. k2 ω2 k1 x12 N2 N1 Точкой пересечения прямой с плоскостью является точка, принадлежащая прямой и
- 3. Пересечение плоскости общего положения с проецирующей плоскостью
- 4. α2 k α k 12 22 1 2
- 5. α2 12 22 A2 B2 C2 A1 B1 C1 x12 11 21 Линия пересечения плоскости ОП
- 6. Пересечение прямой с плоскостью общего положения
- 7. α ϕ m K 1 2 ϕ (m∈ϕ); ϕ∩α ⇒1,2; 1,2∩m ⇒K Алгоритм:
- 8. x12 m2 m1 ϕ2 12 22 11 21 ϕ⊥П2 (m∈ϕ); ϕ∩α ⇒1,2; 1,2∩m ⇒K Алгоритм: К1
- 9. x12 m2 m1 ϕ2 12 22 11 21 ϕ⊥П2 (m∈ϕ); ϕ∩α ⇒1,2; 1,2∩m ⇒K Алгоритм: К1
- 10. Пересечение проецирующих плоскостей
- 11. α β2 α2 k k2 k1 β 90°
- 12. β2 α2 k2 k1 x12 90°
- 13. Построение линии пересечения двух плоскостей общего положения
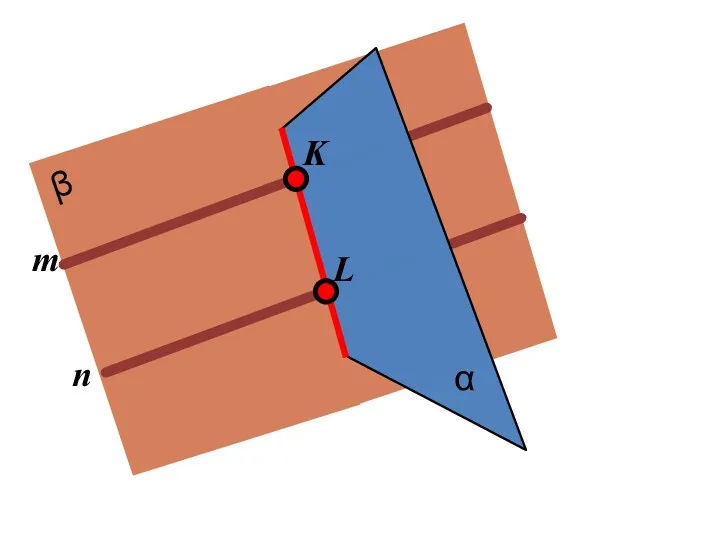
- 14. α m K L β n
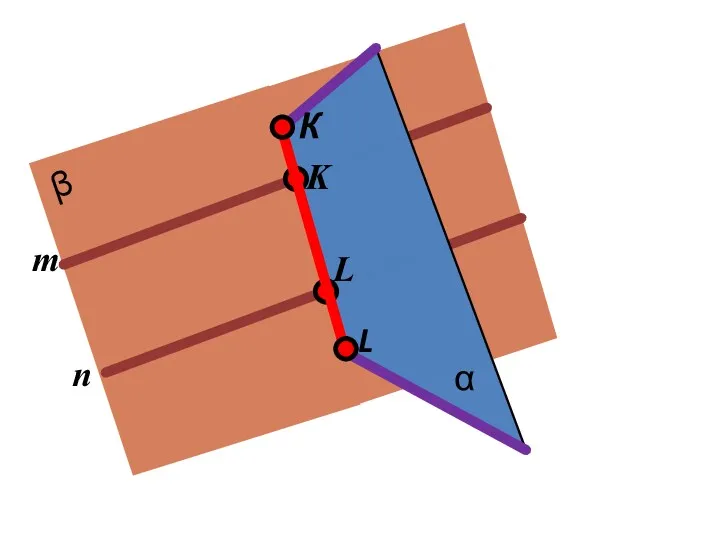
- 15. α m K L β n К L
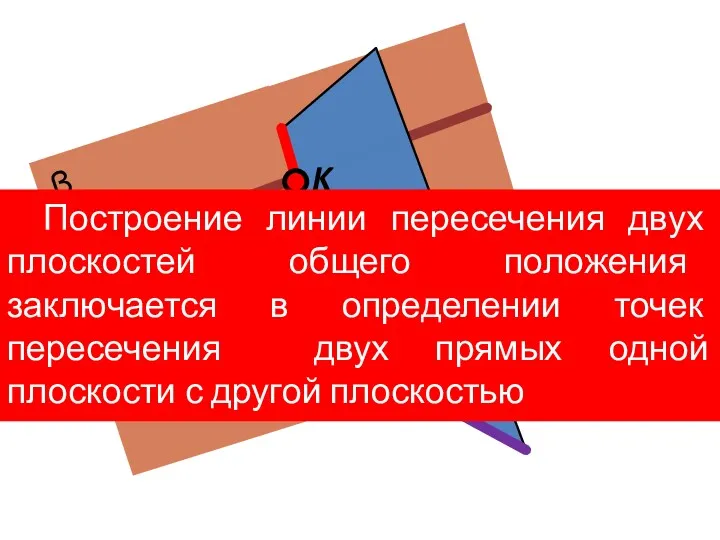
- 16. α m β n L K Построение линии пересечения двух плоскостей общего положения заключается в определении
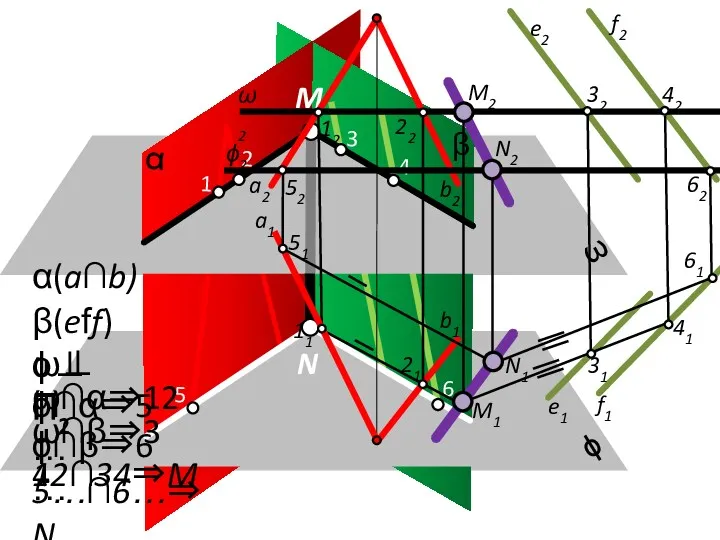
- 17. α β ϕ ω N M 1 2 3 4 5 6
- 18. a2 b2 e2 f2 ϕ2 ω2 b1 a1 12 22 32 42 41 31 21 11
- 19. α(a∩b) и β(eff) ω⊥П2 ϕ⊥ П2 ω∩α⇒12 } ω∩β⇒34 ϕ∩α⇒5… ϕ∩β⇒6… } 5…∩6…⇒N 12∩34⇒M } MN
- 20. Пересечение плоскости с проецирующей плоскостью
- 21. Линией пересечения двух плоскостей является прямая, принадлежащая обеим плоскостям. А2 В2 С2 А1 В1 С1 ϕ2
- 22. Определение видимости плоскостей
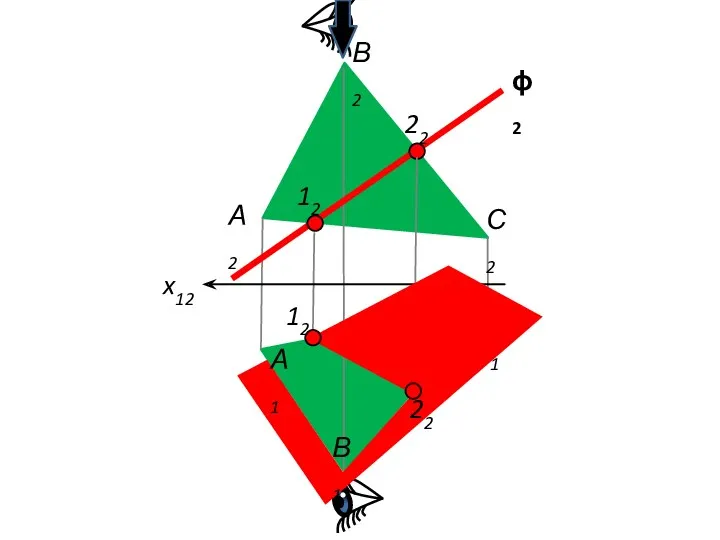
- 23. А2 В2 С2 С1 ϕ2 12 22 x12 А1 В1 12 22
- 24. Пересечение поверхности плоскостью и прямой
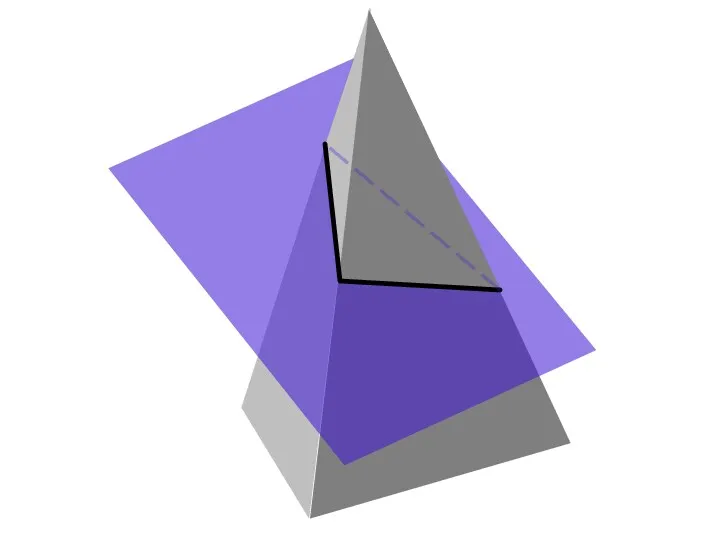
- 25. Пересечение проецирующей плоскости с поверхностью многогранника
- 27. А2 В2 С2 S2 A1 C1 B1 ϕ2 12 22 32 11 21 31
- 28. Пересечение с линейчатой поверхностью
- 29. парабола
- 30. гипербола
- 31. эллипс
- 34. Конические сечения гипербола парабола окружность треугольник эллипс
- 35. ϕ2 1о1 2о1 3о1 4о1 5о1 6о1 7о1 8о1 ≡8о2 2о2 3о2 4о2 5о2 ≡6о2 ≡7о2
- 36. Алгоритм На поверхности обозначить ряд образующих. Обязательно включить очерковые образующие с П1 и П2. Обозначить точки
- 37. ϕ2 (12) 62≡ M m2 n2 22 32 42 52 61 72≡ 82≡ 71 81 11
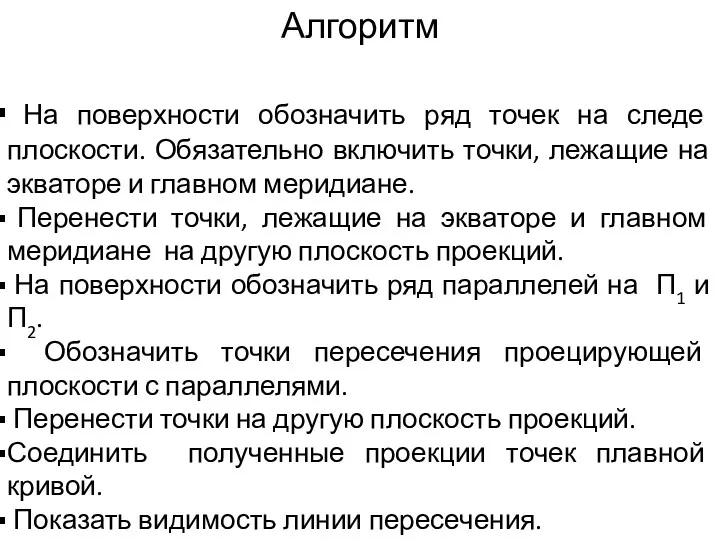
- 38. Алгоритм На поверхности обозначить ряд точек на следе плоскости. Обязательно включить точки, лежащие на экваторе и
- 39. Пересечение прямой с гранными поверхностями
- 41. А2 В2 С2 S2 l1 A1 C1 B1 l2 ϕ2
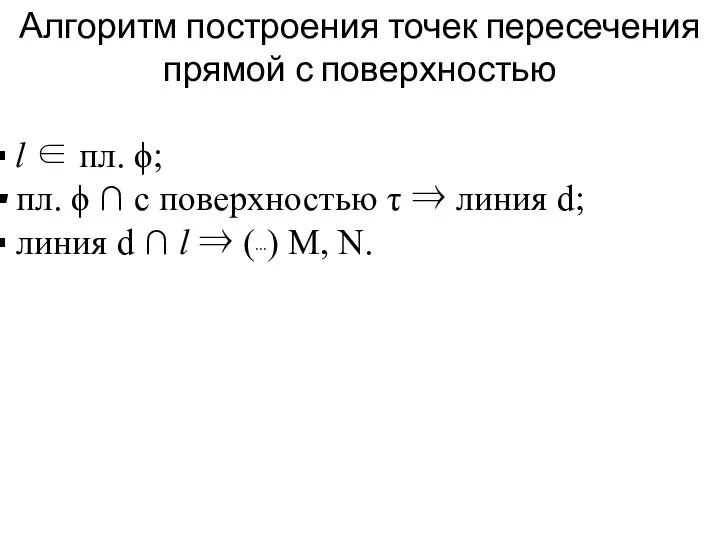
- 42. Алгоритм построения точек пересечения прямой с поверхностью l ∈ пл. ϕ; пл. ϕ ∩ с поверхностью
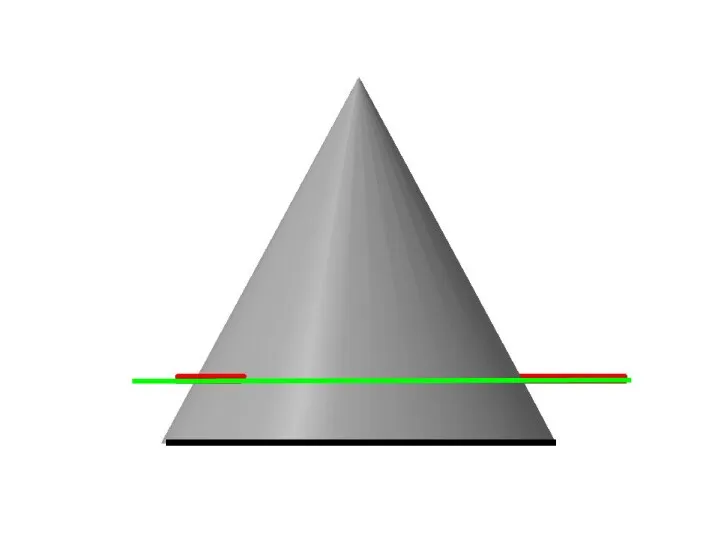
- 43. Пересечение прямой с линейчатой поверхностью
- 45. Алгоритм построения точек пересечения прямой с поверхностью l ∈ пл. ϕ; пл. ϕ ∩ с поверхностью
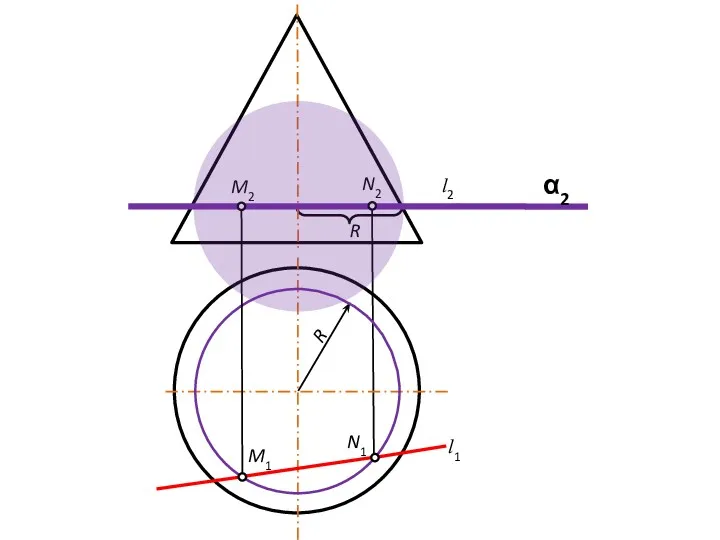
- 49. α2 l2 N2 M2 R R N1 M1 l1
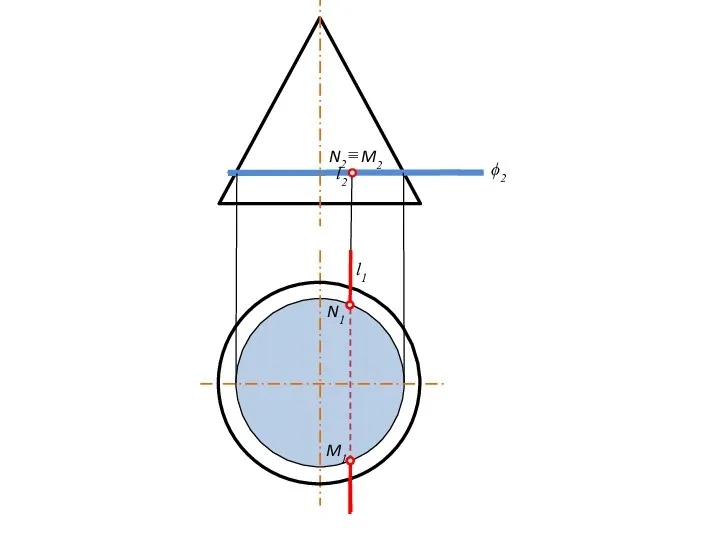
- 50. l2 M2 N2 ≡ M1 N1 ϕ2 l1
- 51. 1 2 3 6 4 N M 5
- 53. 1 2 1 2 3 4 3 4 5 6 N M M N
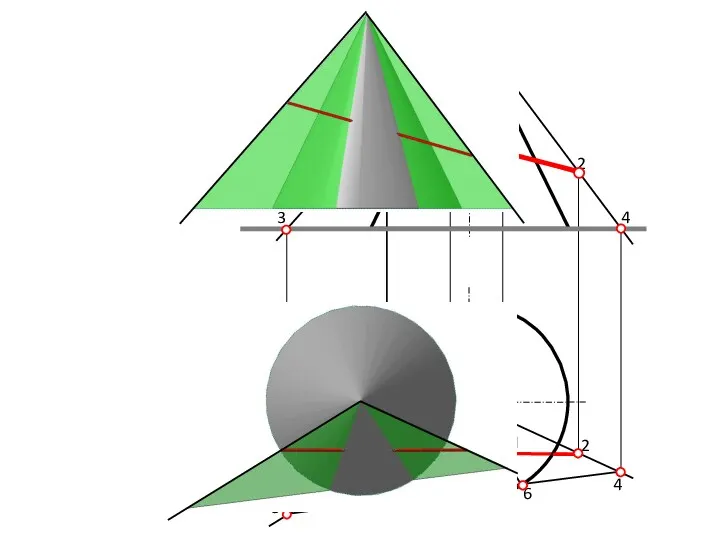
- 54. Алгоритм построения точек пересечения прямой ОП с конусом Выбрать (∙) 1 и (∙) 2 на прямой.
- 57. α1 х14 х12 l2 l1
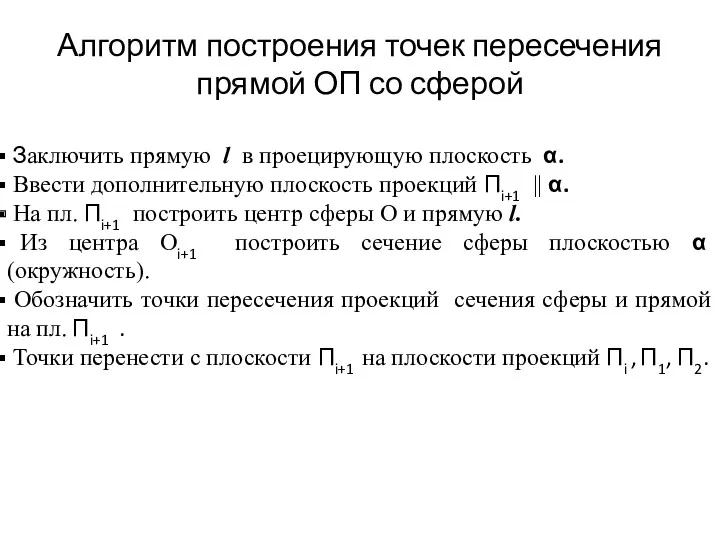
- 58. Алгоритм построения точек пересечения прямой ОП со сферой Заключить прямую l в проецирующую плоскость α. Ввести
- 60. Скачать презентацию
k2
ω2
k1
x12
N2
N1
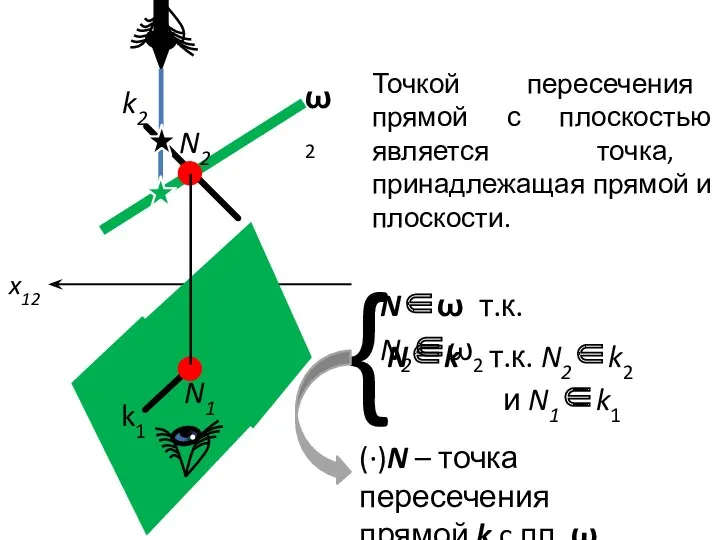
Точкой пересечения прямой с плоскостью является точка, принадлежащая прямой и плоскости.
N∈ω
k2
ω2
k1
x12
N2
N1
Точкой пересечения прямой с плоскостью является точка, принадлежащая прямой и плоскости.
N∈ω
Пересечение плоскости общего положения с проецирующей плоскостью
Пересечение плоскости общего положения с проецирующей плоскостью

α2
k
α
k
12
22
1
2
α2
k
α
k
12
22
1
2
α2
12
22
A2
B2
C2
A1
B1
C1
x12
11
21
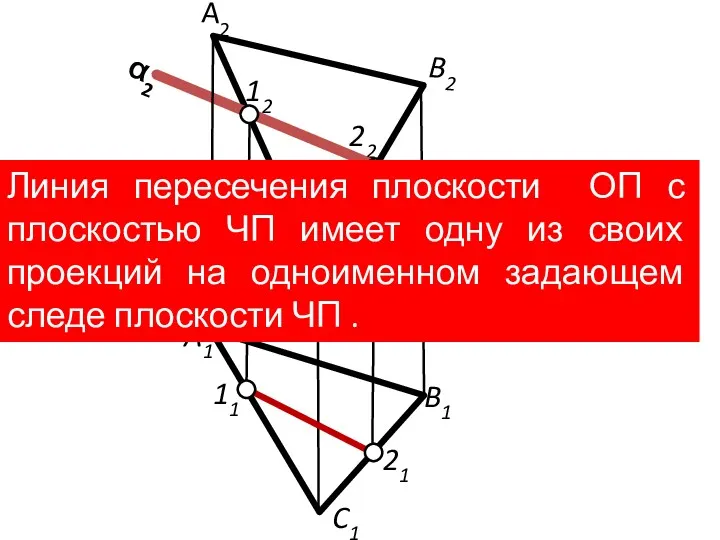
Линия пересечения плоскости ОП с плоскостью ЧП имеет одну из своих
α2
12
22
A2
B2
C2
A1
B1
C1
x12
11
21
Линия пересечения плоскости ОП с плоскостью ЧП имеет одну из своих

Пересечение прямой с плоскостью общего положения
Пересечение прямой с плоскостью общего положения
α
ϕ
m
K
1
2
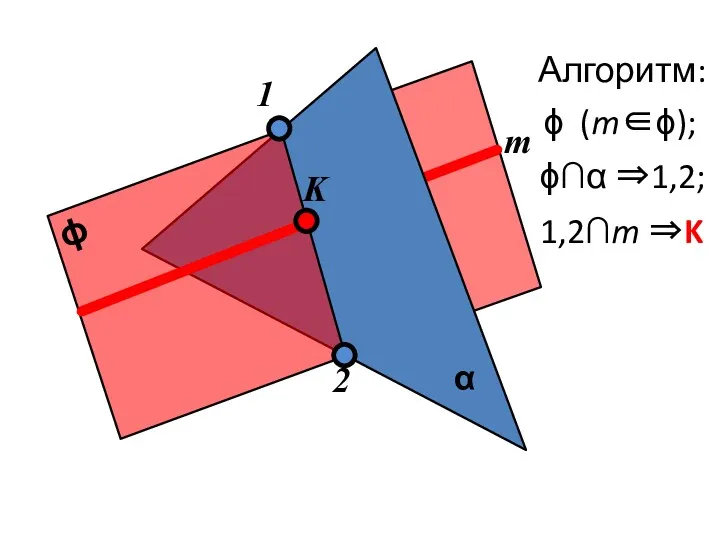
ϕ (m∈ϕ);
ϕ∩α ⇒1,2;
1,2∩m ⇒K
Алгоритм:
α
ϕ
m
K
1
2
ϕ (m∈ϕ);
ϕ∩α ⇒1,2;
1,2∩m ⇒K
Алгоритм:

x12
m2
m1
ϕ2
12
22
11
21
ϕ⊥П2 (m∈ϕ);
ϕ∩α ⇒1,2;
1,2∩m ⇒K
Алгоритм:
К1
А1
С1
В1
В2
С2
А
К2
x12
m2
m1
ϕ2
12
22
11
21
ϕ⊥П2 (m∈ϕ);
ϕ∩α ⇒1,2;
1,2∩m ⇒K
Алгоритм:
К1
А1
С1
В1
В2
С2
А
К2

x12
m2
m1
ϕ2
12
22
11
21
ϕ⊥П2 (m∈ϕ);
ϕ∩α ⇒1,2;
1,2∩m ⇒K
Алгоритм:
К1
А1
С1
В1
В2
С2
А
К2
x12
m2
m1
ϕ2
12
22
11
21
ϕ⊥П2 (m∈ϕ);
ϕ∩α ⇒1,2;
1,2∩m ⇒K
Алгоритм:
К1
А1
С1
В1
В2
С2
А
К2

Пересечение проецирующих плоскостей
Пересечение проецирующих плоскостей

α
β2
α2
k
k2
k1
β
90°
α
β2
α2
k
k2
k1
β
90°

β2
α2
k2
k1
x12
90°
β2
α2
k2
k1
x12
90°
Построение линии пересечения двух плоскостей общего положения
Построение линии пересечения двух плоскостей общего положения
α
m
K
L
β
n
α
m
K
L
β
n
α
m
K
L
β
n
К
L
α
m
K
L
β
n
К
L
α
m
β
n
L
K
Построение линии пересечения двух плоскостей общего положения заключается в определении точек
α
m
β
n
L
K
Построение линии пересечения двух плоскостей общего положения заключается в определении точек

α
β
ϕ
ω
N
M
1
2
3
4
5
6
α
β
ϕ
ω
N
M
1
2
3
4
5
6
a2
b2
e2
f2
ϕ2
ω2
b1
a1
12
22
32
42
41
31
21
11
52
62
61
51
M1
N1
N2
M2
e1
f1
α(a∩b)
β(eff)
ω⊥П2
ϕ⊥ П2
ω∩α⇒12
12∩34⇒M
ω∩β⇒34
ϕ∩α⇒5…
ϕ∩β⇒6…
5…∩6…⇒N
a2
b2
e2
f2
ϕ2
ω2
b1
a1
12
22
32
42
41
31
21
11
52
62
61
51
M1
N1
N2
M2
e1
f1
α(a∩b)
β(eff)
ω⊥П2
ϕ⊥ П2
ω∩α⇒12
12∩34⇒M
ω∩β⇒34
ϕ∩α⇒5…
ϕ∩β⇒6…
5…∩6…⇒N
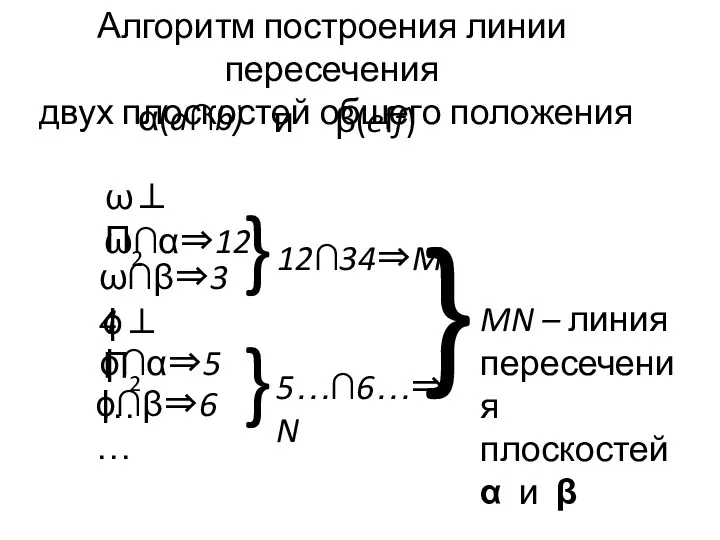
α(a∩b)
и β(eff)
ω⊥П2
ϕ⊥ П2
ω∩α⇒12
}
ω∩β⇒34
ϕ∩α⇒5…
ϕ∩β⇒6…
}
5…∩6…⇒N
12∩34⇒M
}
MN – линия
пересечения
плоскостей
α и β
Алгоритм построения линии
α(a∩b)
и β(eff)
ω⊥П2
ϕ⊥ П2
ω∩α⇒12
}
ω∩β⇒34
ϕ∩α⇒5…
ϕ∩β⇒6…
}
5…∩6…⇒N
12∩34⇒M
}
MN – линия
пересечения
плоскостей
α и β
Алгоритм построения линии

Пересечение плоскости с проецирующей плоскостью
Пересечение плоскости с проецирующей плоскостью

Линией пересечения двух плоскостей является прямая, принадлежащая обеим плоскостям.
А2
В2
С2
А1
В1
С1
ϕ2
12
22
12
22
x12
12 ∈ϕ т.к.
Линией пересечения двух плоскостей является прямая, принадлежащая обеим плоскостям.
А2
В2
С2
А1
В1
С1
ϕ2
12
22
12
22
x12
12 ∈ϕ т.к.
Определение видимости плоскостей
Определение видимости плоскостей
А2
В2
С2
С1
ϕ2
12
22
x12
А1
В1
12
22
А2
В2
С2
С1
ϕ2
12
22
x12
А1
В1
12
22
Пересечение поверхности плоскостью и прямой
Пересечение поверхности плоскостью и прямой
Пересечение проецирующей плоскости с поверхностью многогранника
Пересечение проецирующей плоскости с поверхностью многогранника

А2
В2
С2
S2
A1
C1
B1
ϕ2
12
22
32
11
21
31
А2
В2
С2
S2
A1
C1
B1
ϕ2
12
22
32
11
21
31
Пересечение с линейчатой поверхностью
Пересечение с линейчатой поверхностью
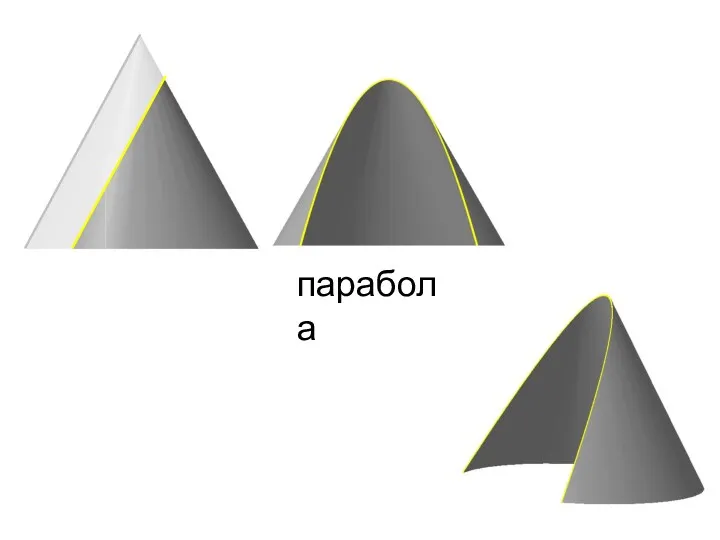
парабола
парабола

гипербола
гипербола

эллипс
эллипс



Конические сечения
гипербола
парабола
окружность
треугольник
эллипс
Конические сечения
гипербола
парабола
окружность
треугольник
эллипс

ϕ2
1о1
2о1
3о1
4о1
5о1
6о1
7о1
8о1
≡8о2
2о2
3о2
4о2
5о2
≡6о2
≡7о2
1о2
21
51
71
31
41
61
81
11≡
12 ≡
22
32
42
62 ≡
52
72 ≡
≡82
ϕ2
1о1
2о1
3о1
4о1
5о1
6о1
7о1
8о1
≡8о2
2о2
3о2
4о2
5о2
≡6о2
≡7о2
1о2
21
51
71
31
41
61
81
11≡
12 ≡
22
32
42
62 ≡
52
72 ≡
≡82

Алгоритм
На поверхности обозначить ряд образующих. Обязательно включить очерковые образующие
Алгоритм
На поверхности обозначить ряд образующих. Обязательно включить очерковые образующие
ϕ2
(12)
62≡
M
m2
n2
22
32
42
52
61
72≡
82≡
71
81
11
51
41
31
21
M
m1
n1
ϕ2
(12)
62≡
M
m2
n2
22
32
42
52
61
72≡
82≡
71
81
11
51
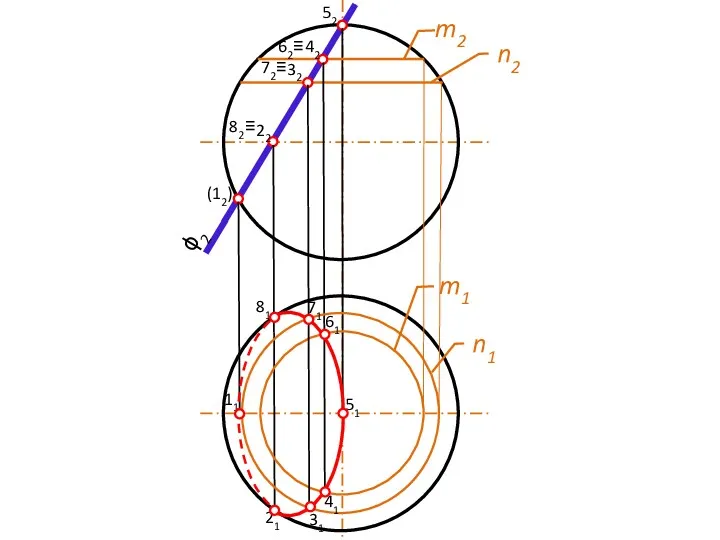
41
31
21
M
m1
n1
Алгоритм
На поверхности обозначить ряд точек на следе плоскости. Обязательно
Алгоритм
На поверхности обозначить ряд точек на следе плоскости. Обязательно

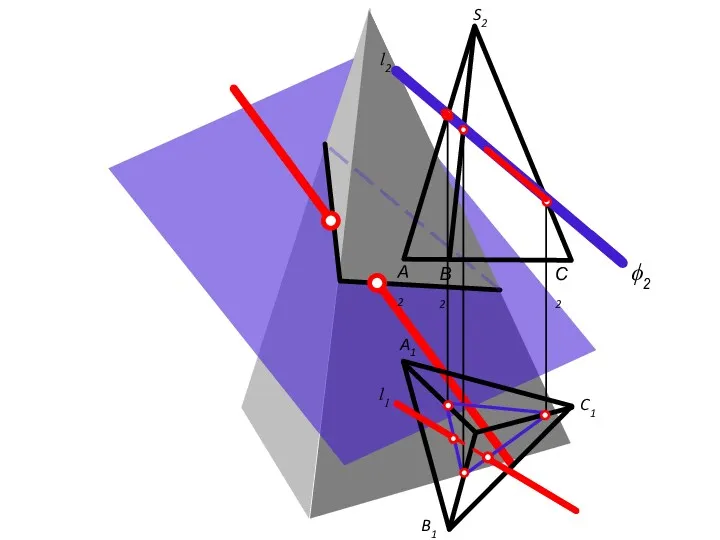
Пересечение прямой с гранными поверхностями
Пересечение прямой с гранными поверхностями

А2
В2
С2
S2
l1
A1
C1
B1
l2
ϕ2
А2
В2
С2
S2
l1
A1
C1
B1
l2
ϕ2
Алгоритм построения точек пересечения прямой с поверхностью
l ∈ пл. ϕ;
Алгоритм построения точек пересечения прямой с поверхностью
l ∈ пл. ϕ;
Пересечение прямой с линейчатой поверхностью
Пересечение прямой с линейчатой поверхностью

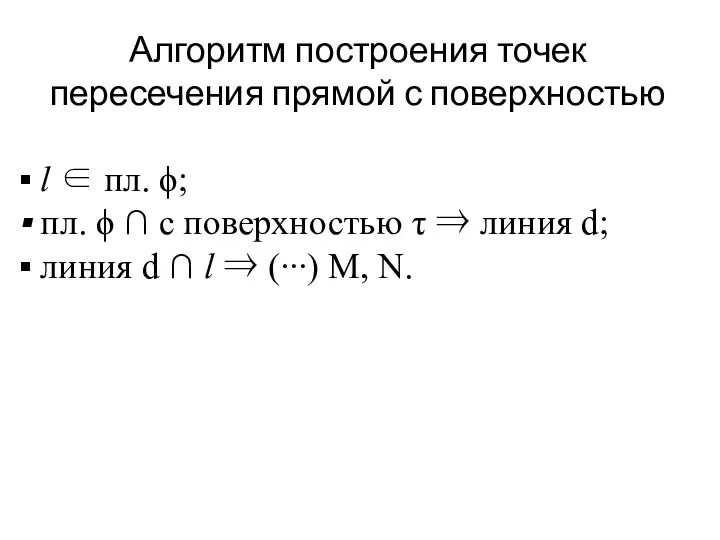
Алгоритм построения точек пересечения прямой с поверхностью
l ∈ пл. ϕ;
Алгоритм построения точек пересечения прямой с поверхностью
l ∈ пл. ϕ;


α2
l2
N2
M2
R
R
N1
M1
l1
α2
l2
N2
M2
R
R
N1
M1
l1
l2
M2
N2
≡
M1
N1
ϕ2
l1
l2
M2
N2
≡
M1
N1
ϕ2
l1

1
2
3
6
4
N
M
5
1
2
3
6
4
N
M
5

1
2
1
2
3
4
3
4
5
6
N
M
M
N
1
2
1
2
3
4
3
4
5
6
N
M
M
N
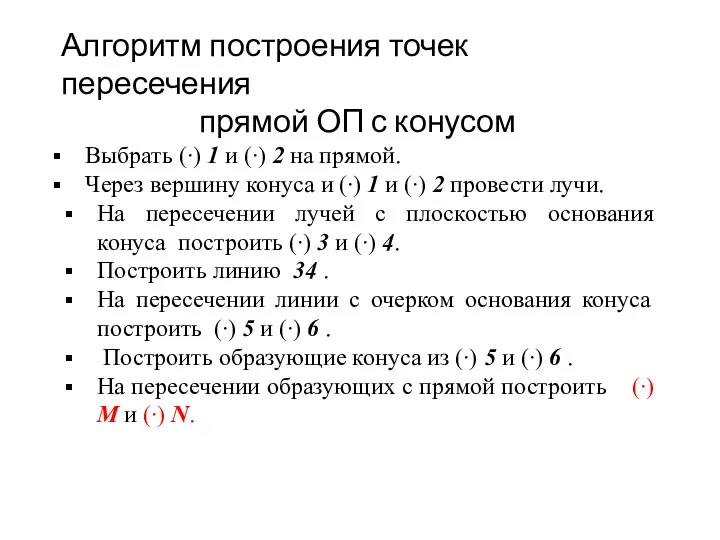
Алгоритм построения точек пересечения
прямой ОП с конусом
Выбрать (∙) 1
Алгоритм построения точек пересечения
прямой ОП с конусом
Выбрать (∙) 1


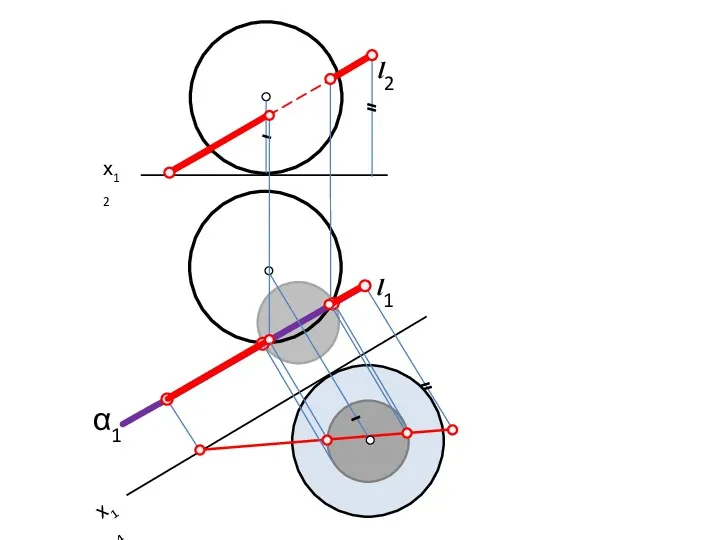
α1
х14
х12
l2
l1
α1
х14
х12
l2
l1
Алгоритм построения точек пересечения
прямой ОП со сферой
Заключить прямую l
Алгоритм построения точек пересечения
прямой ОП со сферой
Заключить прямую l
 Инженерная и компьютерная графика
Инженерная и компьютерная графика Ортогональные проекции плоскости. Относительное положение плоскостей
Ортогональные проекции плоскости. Относительное положение плоскостей Расчет проёмов кирпичных стен. Задание 2
Расчет проёмов кирпичных стен. Задание 2 Модернизация линии уборки навоза на ферме КРС
Модернизация линии уборки навоза на ферме КРС Основи будівельного креслення
Основи будівельного креслення Проектирование мебели
Проектирование мебели Функциональные схемы систем автоматизации технологических процессов
Функциональные схемы систем автоматизации технологических процессов Эскиз. Алгоритм выполнения эскиза
Эскиз. Алгоритм выполнения эскиза Поверхности. Основные понятия и определения
Поверхности. Основные понятия и определения Теория построения проекционного чертежа
Теория построения проекционного чертежа Чтение и деталирование сборочного чертежа
Чтение и деталирование сборочного чертежа Технологический контроль конструкторской документации
Технологический контроль конструкторской документации Графическое обозначение материалов на чертежах
Графическое обозначение материалов на чертежах Основы автоматизированного проектирования
Основы автоматизированного проектирования Сопряжение. Внешнее сопряжение
Сопряжение. Внешнее сопряжение Понятие о стандартах. Форматы. Рамка поля чертежа
Понятие о стандартах. Форматы. Рамка поля чертежа Правила оформления чертежей
Правила оформления чертежей Начертательная геометрия и инженерная графика. Развертки. Лекция 14
Начертательная геометрия и инженерная графика. Развертки. Лекция 14 Спецификация
Спецификация Аксонометрические проекции. Урок 1
Аксонометрические проекции. Урок 1 Аксонометрические проекции
Аксонометрические проекции Построение аксонометрических схем
Построение аксонометрических схем Прямая и плоскость
Прямая и плоскость Порядок чтения чертежей деталей
Порядок чтения чертежей деталей Техническая документация. Виды. Назначение
Техническая документация. Виды. Назначение Техническое рисование и элементы технического конструирования
Техническое рисование и элементы технического конструирования Проецирование на три плоскости проекций. 8 класс
Проецирование на три плоскости проекций. 8 класс Базовые геометрические элементы начертательной геометрии
Базовые геометрические элементы начертательной геометрии