- Способы преобразования проекций (Лекция 3)

Содержание
- 2. Способы преобразования проекций
- 3. Способы преобразования проекций применяют для получения нового изображения объекта или группы объектов, которое позволяет упростить решение
- 5. Дополнительное прямоугольное проецирование – перемена плоскостей проекций
- 6. Подбираемая дополнительная плоскость проекций должна быть только проецирующей. Тем самым создаётся новая прямоугольная система плоскостей проекций.
- 7. В ортогональной системе двух плоскостей проекций П1/П2 взята произво-льная точка А и построены ее проекции.
- 8. Введена дополнительная горизонтально-проецирующая плоскость проекций П4. Например,. Таким образом создана новая система ортогональных плоскостей проекций П1/П4
- 9. Точка А ортогонально проецируется на плоскость П4 Так как точка А не изменяет своего положения относительно
- 10. Принцип построения эпюра при использовании способа перемены плоскостей проекций (А,П1) = const ⇒ (А,А1) = (А2,х1,2)
- 11. Вращение
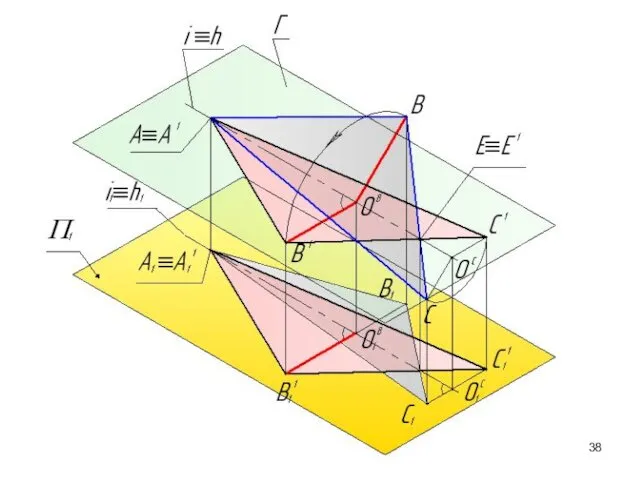
- 12. Каждая точка объекта вращается вокруг выбранной оси, перемещаясь по окружности, лежащей в плоскости перпендикулярной оси вращения.
- 13. Ось вращения – прямая уровня Плоскость вращения точки - проецирующую плоскость. На плоскости проекций, параллельно которой
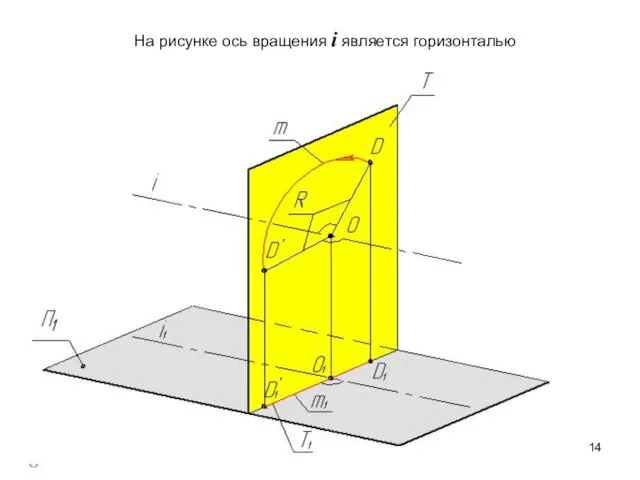
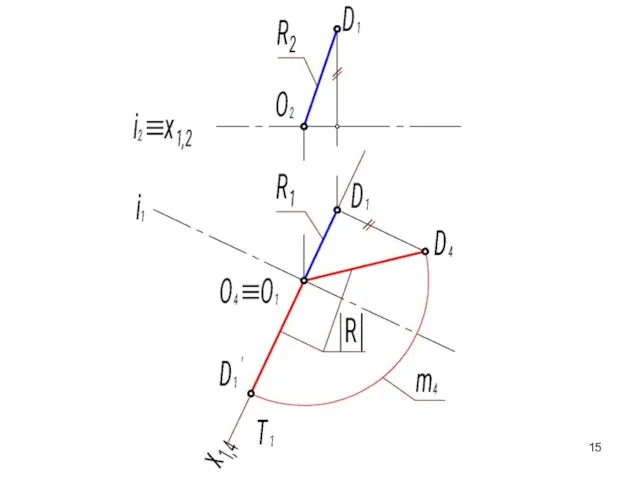
- 14. На рисунке ось вращения i является горизонталью
- 16. Базовые преобразования проекций
- 17. Рассматриваются два варианта преобразования. Вариант 1. Переход от заданного положения объекта (прямой линии или плоской фигуры)
- 18. Базовое преобразование № 1. Преобразование прямой общего положения в прямую уровня (построение дополнительной проекции прямой линии
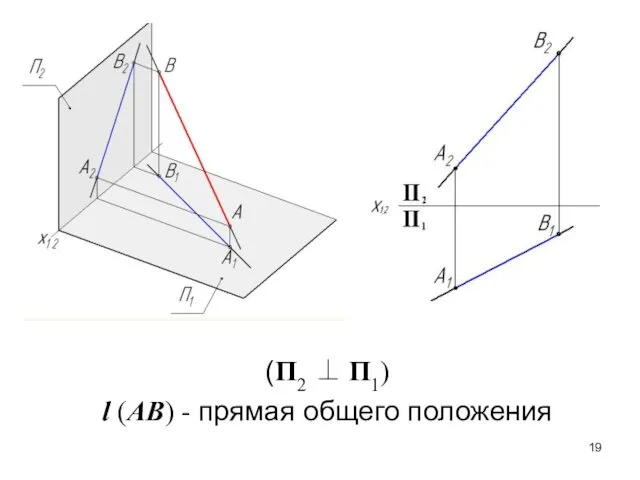
- 19. (П2 ⊥ П1) l (AB) - прямая общего положения
- 20. Подбирается дополнительная плоскость проекций П4 ( П4 || l ) ∧ (( П4 ⊥ П1) ∨
- 21. Строится дополнительная проекция l (AB) на поле плоскости П4. А1А4 ⊥ х1,4 и В1В4 ⊥ х1,4
- 22. Базовое преобразование №2. Преобразование прямой общего положения в проецирующую прямую (построение дополнительной проекции прямой линии в
- 23. При прямоугольном проецировании прямая является проецирующей, если она перпендикулярна плоскости проекций. Следовательно, дополнительная плоскость проекций должна
- 24. 1-й этап Прямая преобразуется в прямую уровня ( П4 II l ) ∧ ( П4⊥ П1
- 25. 2-й этап Из прямой уровня прямая преобразуется в проецирующую прямую ( П5 ⊥ l ) ∧
- 26. Для прямой уровня данное преобразование выполняется за один этап Прямая уровня (h или f) параллельна плоскости
- 27. Базовое преобразование № 3. Преобразование плоскости (торсовой поверхности) общего положения в проецирующую поверхность (построение проекции плоскости
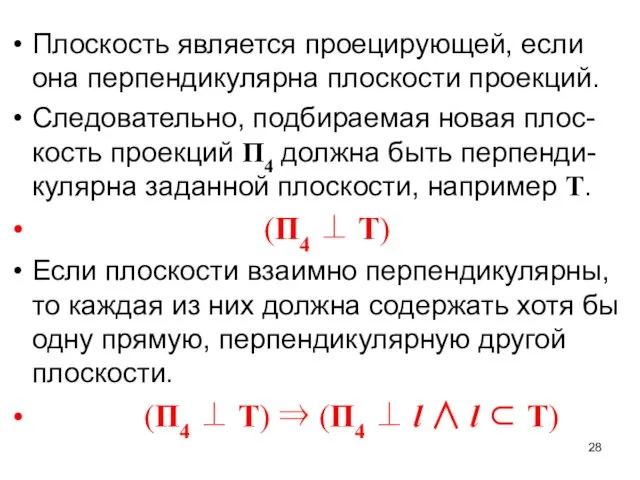
- 28. Плоскость является проецирующей, если она перпендикулярна плоскости проекций. Следовательно, подбираемая новая плос-кость проекций П4 должна быть
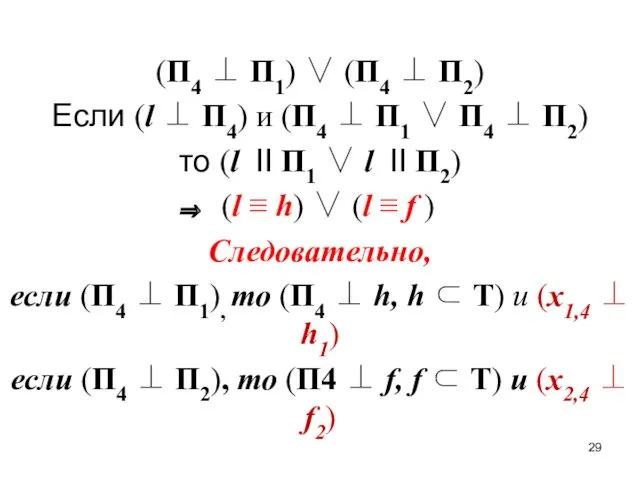
- 29. (П4 ⊥ П1) ∨ (П4 ⊥ П2) Если (l ⊥ П4) и (П4 ⊥ П1 ∨
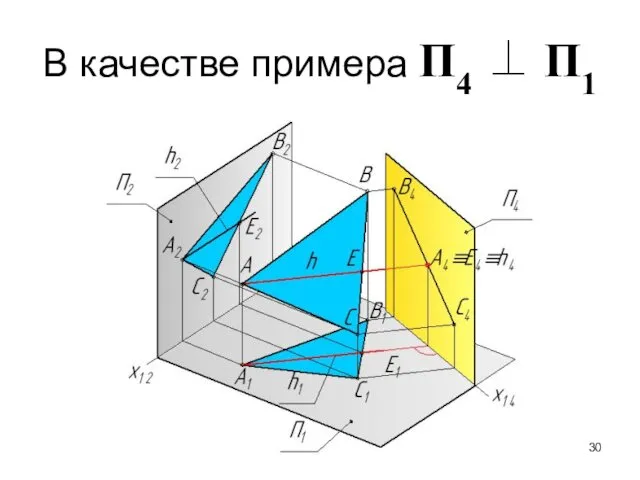
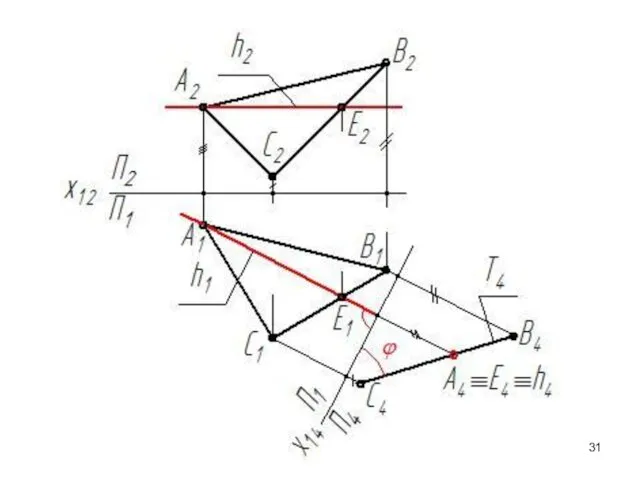
- 30. В качестве примера П4 ⊥ П1
- 32. Базовое преобразование № 4. Построение проекции плоской фигуры на параллельной ей плоскости проекций
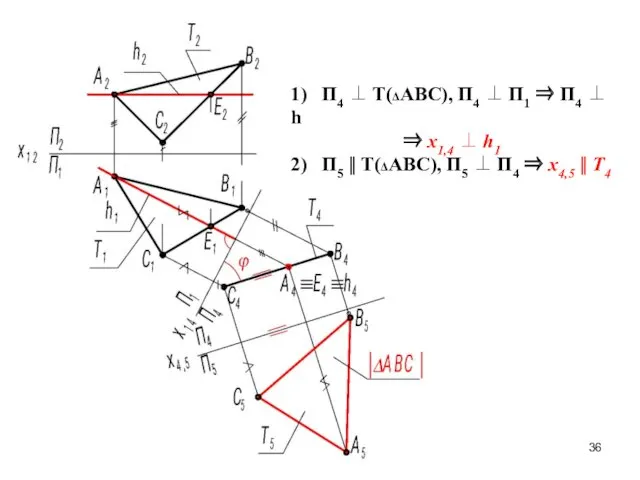
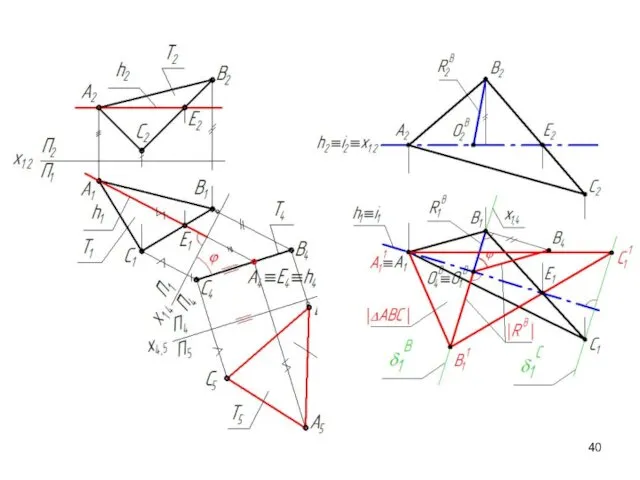
- 33. Решение задачи способом замены плоскостей проекций
- 34. П′ II Т Так как плоскость Т – плоскость общего положения, то и любая плоскость ей
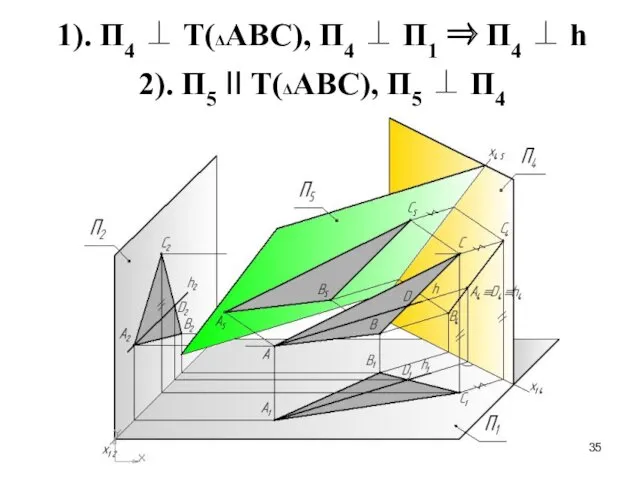
- 35. 1). П4 ⊥ Т(ΔАВС), П4 ⊥ П1 ⇒ П4 ⊥ h 2). П5 II Т(ΔАВС), П5
- 36. 1) П4 ⊥ Т(ΔАВС), П4 ⊥ П1 ⇒ П4 ⊥ h ⇒ х1,4 ⊥ h1 2)
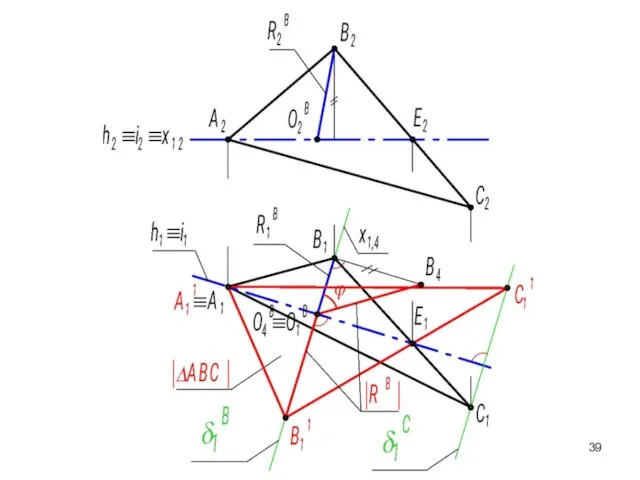
- 37. Решение задачи способом вращения вокруг прямой уровня
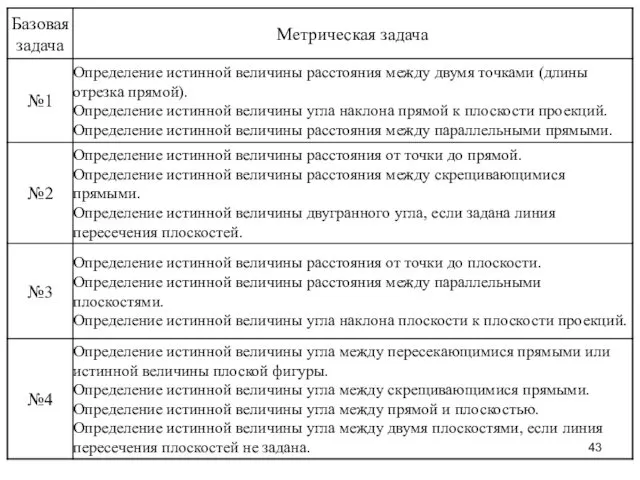
- 41. МЕТРИЧЕСКИЕ И КОНСТРУКТИВНЫЕ ЗАДАЧИ
- 42. Метрическими называются задачи, в ходе решения которых определяется значение измеряемой величины – расстояния между двумя точками
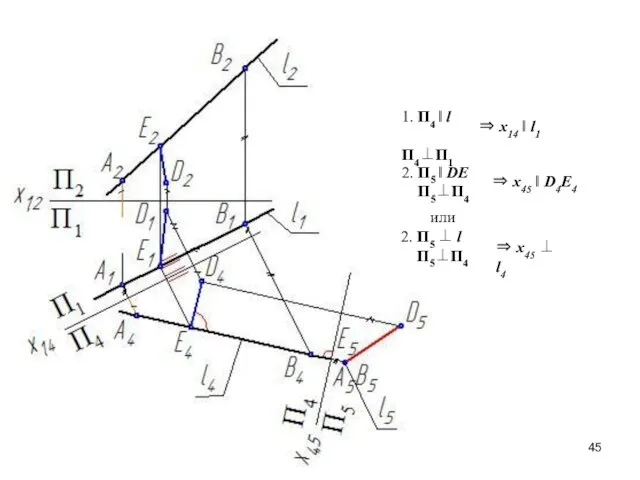
- 44. Расстояние от точки до прямой
- 45. 1. П4 ‖ l П4⊥П1 ⇒ х14 ‖ l1 2. П5 ‖ DE П5⊥П4 ⇒ х45
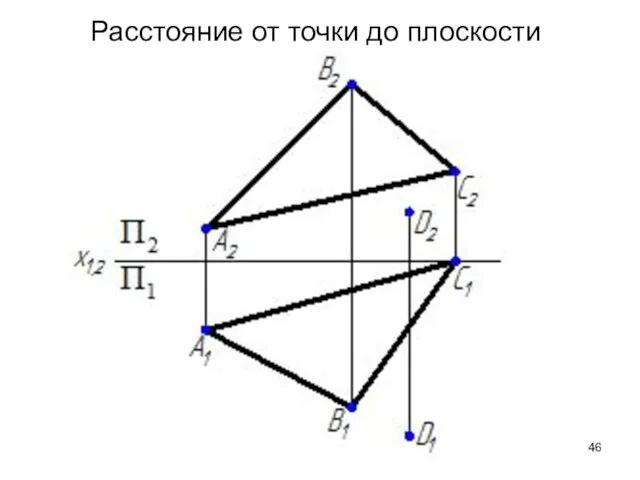
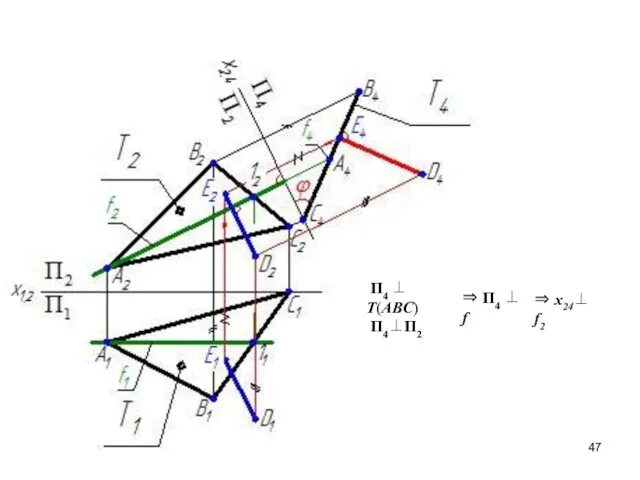
- 46. Расстояние от точки до плоскости
- 47. П4 ⊥ T(ABC) П4⊥П2 ⇒ П4 ⊥ f ⇒ х24⊥ f2
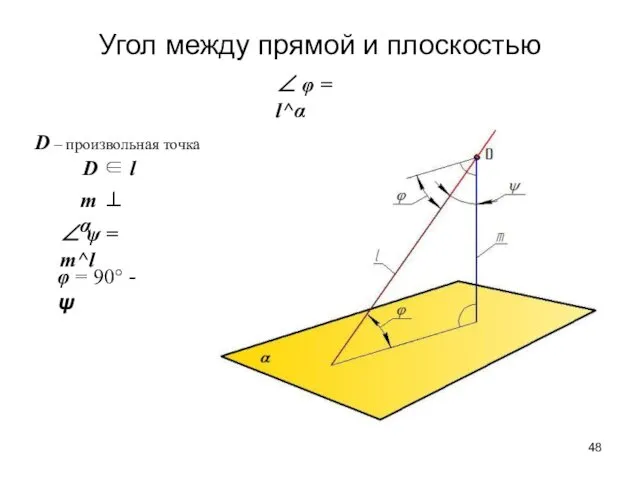
- 48. Угол между прямой и плоскостью ∠ φ = l^α D – произвольная точка D ∈ l
- 49. Угол между прямой и плоскостью Исходные данные Заданы прямая l и плоскость α(a,b)
- 50. 1. На прямой l выбирается произвольная точка D. 2. Через точку D проводят перпендикуляр к заданной
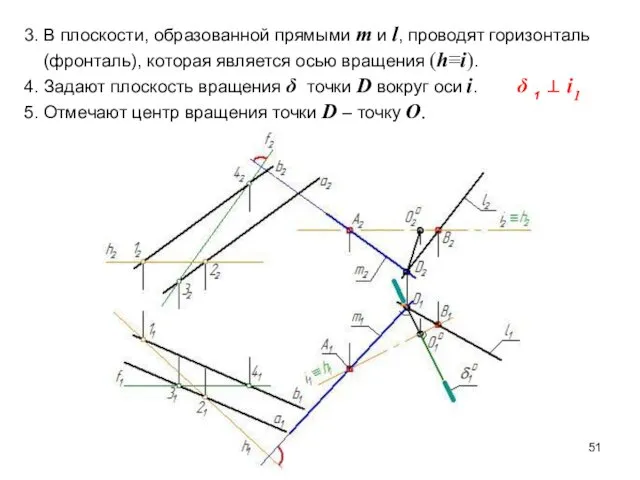
- 51. 3. В плоскости, образованной прямыми m и l, проводят горизонталь (фронталь), которая является осью вращения (h≡i).
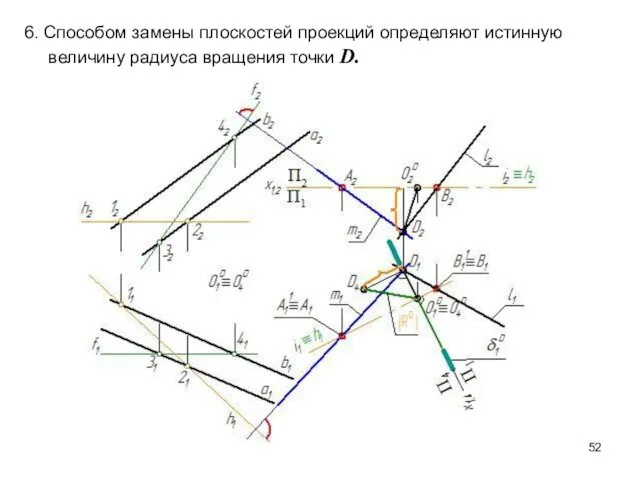
- 52. 6. Способом замены плоскостей проекций определяют истинную величину радиуса вращения точки D.
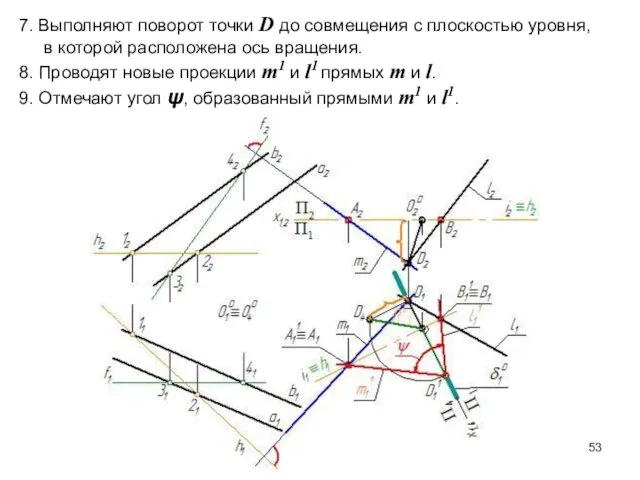
- 53. 7. Выполняют поворот точки D до совмещения с плоскостью уровня, в которой расположена ось вращения. 8.
- 54. 10. Достраивают угол ψ до прямого и отмечают угол φ.
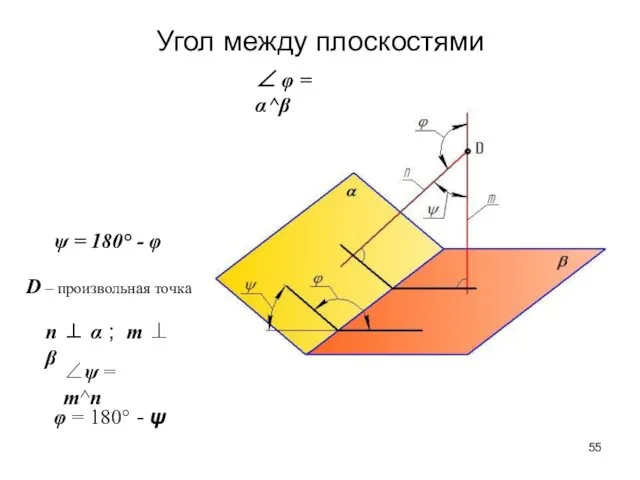
- 55. Угол между плоскостями ∠ φ = α^β ψ = 180° - φ D – произвольная точка
- 56. Угол между плоскостями Исходные данные Заданы плоскости α(h,f) и β(a,b)
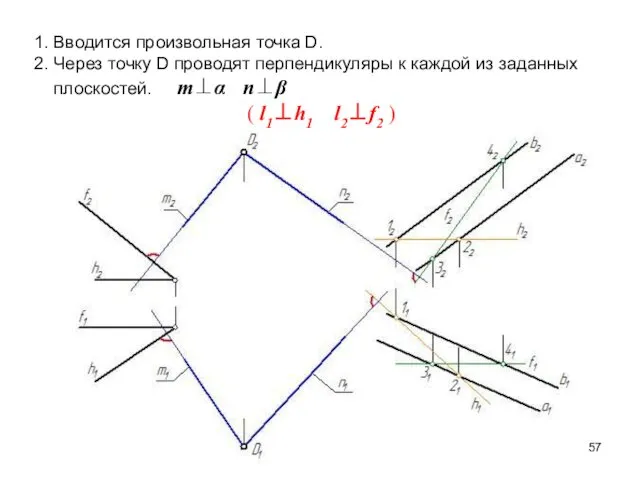
- 57. 1. Вводится произвольная точка D. 2. Через точку D проводят перпендикуляры к каждой из заданных плоскостей.
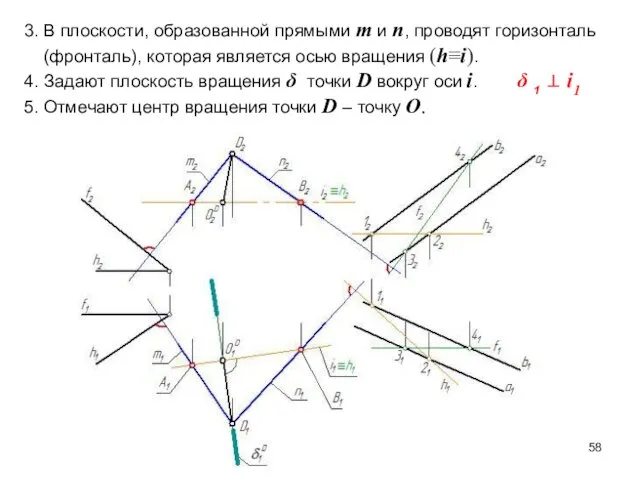
- 58. 3. В плоскости, образованной прямыми m и n, проводят горизонталь (фронталь), которая является осью вращения (h≡i).
- 59. 6. Способом замены плоскостей проекций определяют истинную величину радиуса вращения точки D.
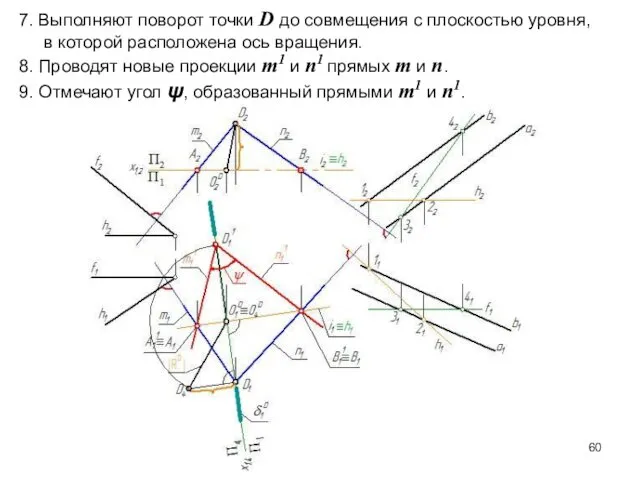
- 60. 7. Выполняют поворот точки D до совмещения с плоскостью уровня, в которой расположена ось вращения. 8.
- 62. Скачать презентацию
Способы преобразования проекций
Способы преобразования проекций
Способы преобразования проекций применяют для получения нового изображения объекта или группы
Способы преобразования проекций применяют для получения нового изображения объекта или группы

Дополнительное прямоугольное проецирование –
перемена плоскостей проекций
Дополнительное прямоугольное проецирование –
перемена плоскостей проекций
Подбираемая дополнительная плоскость проекций должна быть только проецирующей. Тем самым создаётся
Подбираемая дополнительная плоскость проекций должна быть только проецирующей. Тем самым создаётся
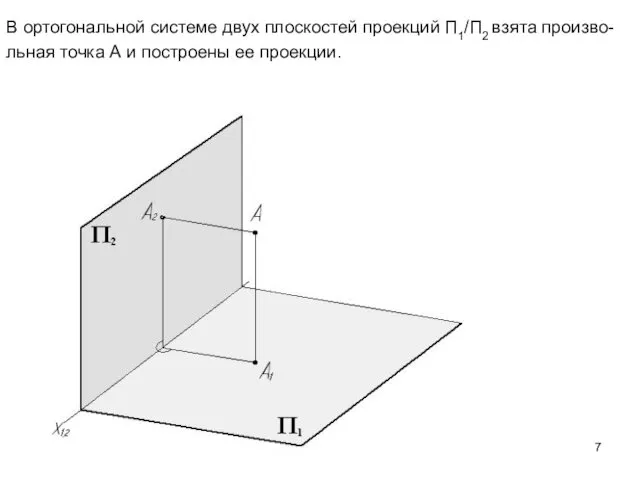
В ортогональной системе двух плоскостей проекций П1/П2 взята произво-льная точка А
В ортогональной системе двух плоскостей проекций П1/П2 взята произво-льная точка А
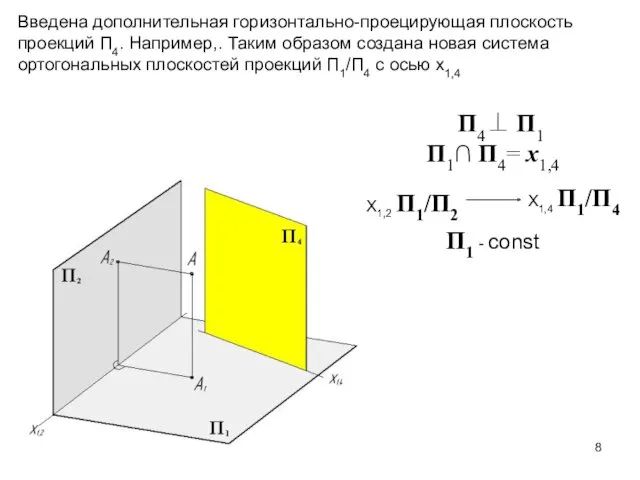
Введена дополнительная горизонтально-проецирующая плоскость проекций П4. Например,. Таким образом создана новая
Введена дополнительная горизонтально-проецирующая плоскость проекций П4. Например,. Таким образом создана новая
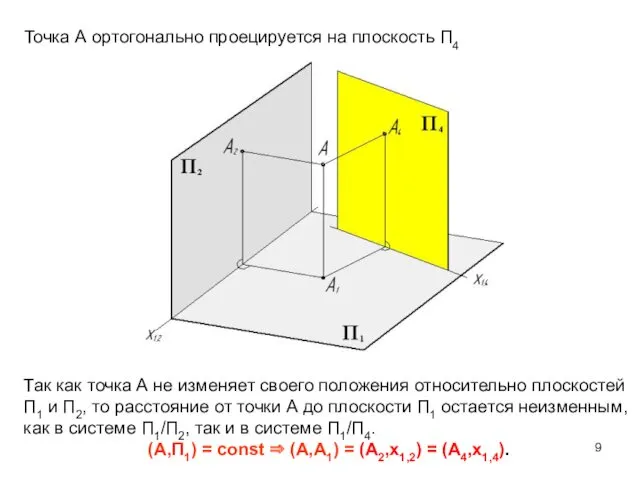
Точка А ортогонально проецируется на плоскость П4
Так как точка А не
Точка А ортогонально проецируется на плоскость П4
Так как точка А не
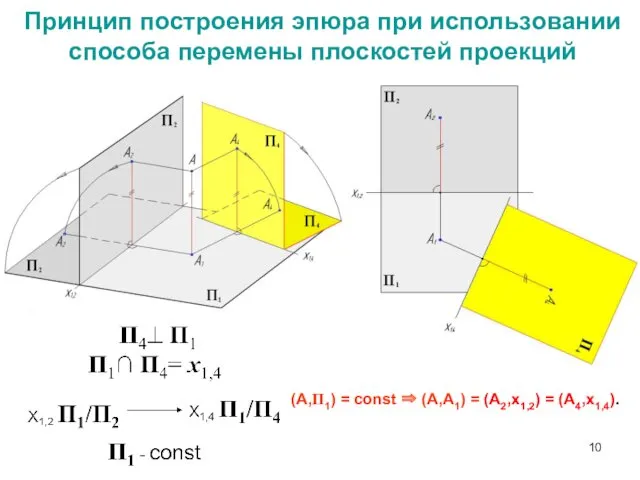
Принцип построения эпюра при использовании способа перемены плоскостей проекций
(А,П1) = const
Принцип построения эпюра при использовании способа перемены плоскостей проекций
(А,П1) = const

Вращение
Вращение
Каждая точка объекта вращается вокруг выбранной оси, перемещаясь по окружности, лежащей
Каждая точка объекта вращается вокруг выбранной оси, перемещаясь по окружности, лежащей
Ось вращения –
прямая уровня
Плоскость вращения точки - проецирующую плоскость.
Ось вращения –
прямая уровня
Плоскость вращения точки - проецирующую плоскость.
На рисунке ось вращения i является горизонталью
На рисунке ось вращения i является горизонталью
Базовые преобразования проекций
Базовые преобразования проекций
Рассматриваются два варианта преобразования.
Вариант 1. Переход от заданного положения объекта
Рассматриваются два варианта преобразования.
Вариант 1. Переход от заданного положения объекта
Базовое преобразование № 1.
Преобразование прямой общего положения в прямую уровня
(построение
Базовое преобразование № 1.
Преобразование прямой общего положения в прямую уровня
(построение
(П2 ⊥ П1)
l (AB) - прямая общего положения
(П2 ⊥ П1)
l (AB) - прямая общего положения
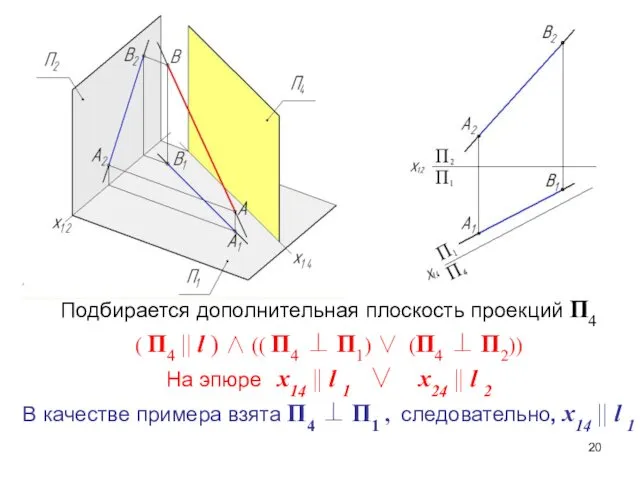
Подбирается дополнительная плоскость проекций П4
( П4 || l ) ∧ ((
Подбирается дополнительная плоскость проекций П4
( П4 || l ) ∧ ((
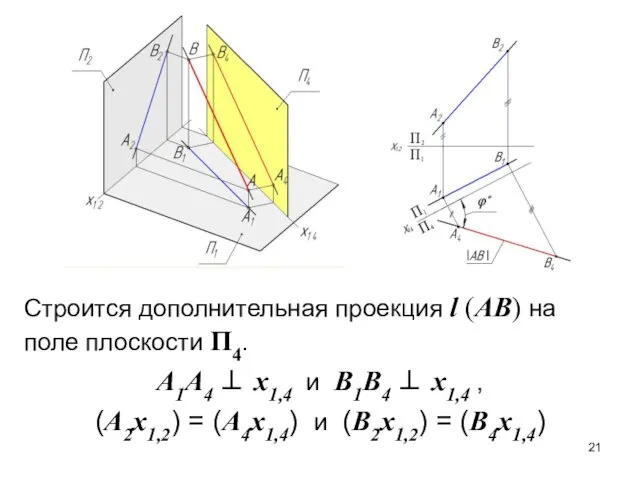
Строится дополнительная проекция l (AB) на поле плоскости П4.
А1А4 ⊥ х1,4
Строится дополнительная проекция l (AB) на поле плоскости П4.
А1А4 ⊥ х1,4
Базовое преобразование №2.
Преобразование прямой общего положения в проецирующую прямую
(построение дополнительной проекции
Базовое преобразование №2.
Преобразование прямой общего положения в проецирующую прямую
(построение дополнительной проекции
При прямоугольном проецировании прямая является проецирующей, если она перпендикулярна плоскости
При прямоугольном проецировании прямая является проецирующей, если она перпендикулярна плоскости
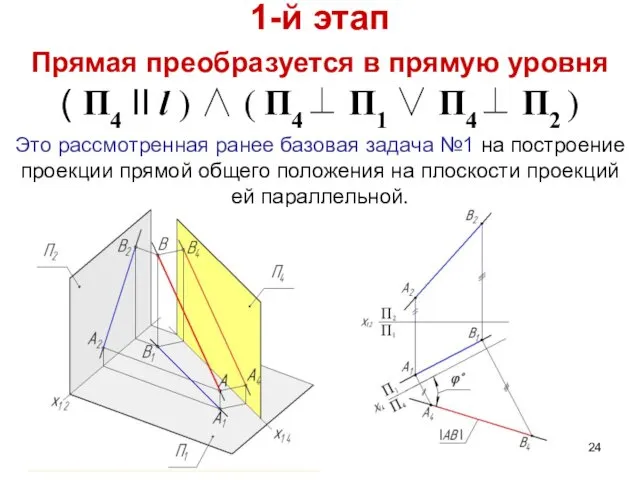
1-й этап
Прямая преобразуется в прямую уровня
( П4 II l )
1-й этап Прямая преобразуется в прямую уровня ( П4 II l )
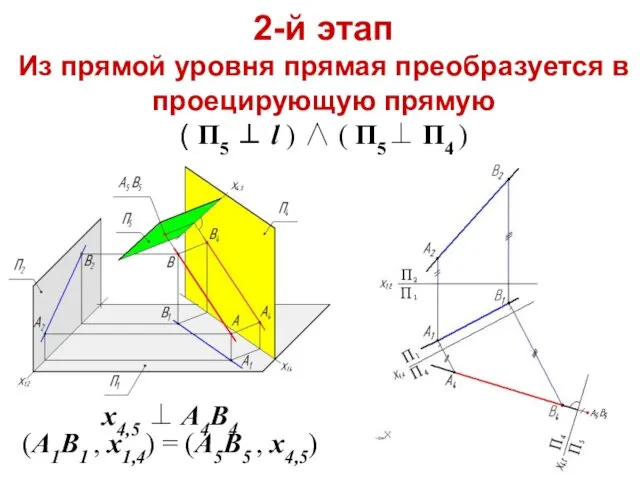
2-й этап
Из прямой уровня прямая преобразуется в проецирующую прямую
( П5
2-й этап Из прямой уровня прямая преобразуется в проецирующую прямую ( П5
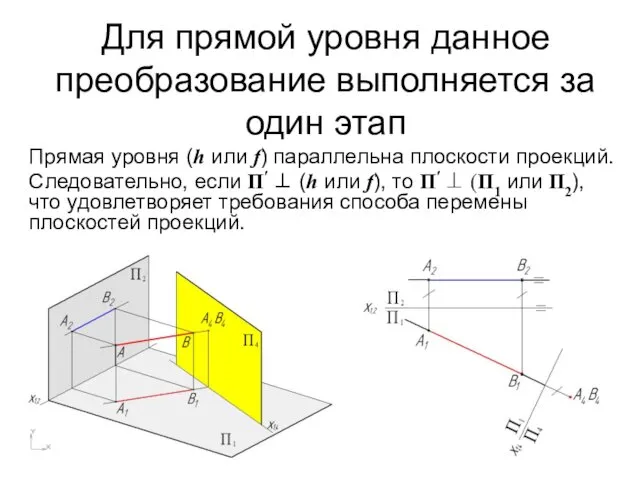
Для прямой уровня данное преобразование выполняется за один этап
Прямая уровня (h
Для прямой уровня данное преобразование выполняется за один этап
Прямая уровня (h
Базовое преобразование № 3.
Преобразование плоскости (торсовой поверхности) общего положения в
Базовое преобразование № 3.
Преобразование плоскости (торсовой поверхности) общего положения в
Плоскость является проецирующей, если она перпендикулярна плоскости проекций.
Следовательно, подбираемая новая плос-кость
Плоскость является проецирующей, если она перпендикулярна плоскости проекций.
Следовательно, подбираемая новая плос-кость
(П4 ⊥ П1) ∨ (П4 ⊥ П2)
Если (l ⊥ П4) и
(П4 ⊥ П1) ∨ (П4 ⊥ П2)
Если (l ⊥ П4) и
В качестве примера П4 ⊥ П1
В качестве примера П4 ⊥ П1
Базовое преобразование № 4.
Построение проекции плоской фигуры на параллельной ей
Базовое преобразование № 4.
Построение проекции плоской фигуры на параллельной ей
Решение задачи способом замены плоскостей проекций
Решение задачи способом замены плоскостей проекций
П′ II Т
Так как плоскость Т – плоскость общего положения, то
П′ II Т
Так как плоскость Т – плоскость общего положения, то
1). П4 ⊥ Т(ΔАВС), П4 ⊥ П1 ⇒ П4 ⊥ h
2).
1). П4 ⊥ Т(ΔАВС), П4 ⊥ П1 ⇒ П4 ⊥ h 2).
1) П4 ⊥ Т(ΔАВС), П4 ⊥ П1 ⇒ П4 ⊥ h
1) П4 ⊥ Т(ΔАВС), П4 ⊥ П1 ⇒ П4 ⊥ h
Решение задачи способом вращения вокруг прямой уровня
Решение задачи способом вращения вокруг прямой уровня

МЕТРИЧЕСКИЕ И КОНСТРУКТИВНЫЕ ЗАДАЧИ
МЕТРИЧЕСКИЕ И КОНСТРУКТИВНЫЕ ЗАДАЧИ
Метрическими называются задачи, в ходе решения которых определяется значение измеряемой величины
Метрическими называются задачи, в ходе решения которых определяется значение измеряемой величины
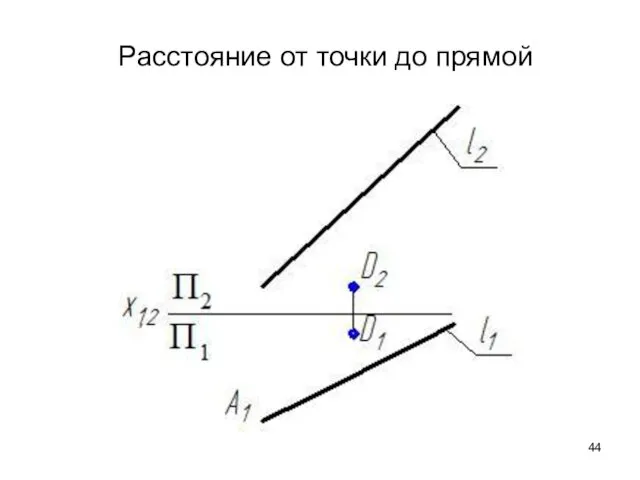
Расстояние от точки до прямой
Расстояние от точки до прямой
1. П4 ‖ l
П4⊥П1
⇒ х14 ‖ l1
2. П5 ‖ DE
1. П4 ‖ l
П4⊥П1
⇒ х14 ‖ l1
2. П5 ‖ DE
Расстояние от точки до плоскости
Расстояние от точки до плоскости
П4 ⊥ T(ABC)
П4⊥П2
⇒ П4 ⊥ f
⇒ х24⊥ f2
П4 ⊥ T(ABC)
П4⊥П2
⇒ П4 ⊥ f
⇒ х24⊥ f2
Угол между прямой и плоскостью
∠ φ = l^α
D – произвольная точка
Угол между прямой и плоскостью
∠ φ = l^α
D – произвольная точка

Угол между прямой и плоскостью
Исходные данные
Заданы прямая l и плоскость α(a,b)
Угол между прямой и плоскостью
Исходные данные
Заданы прямая l и плоскость α(a,b)
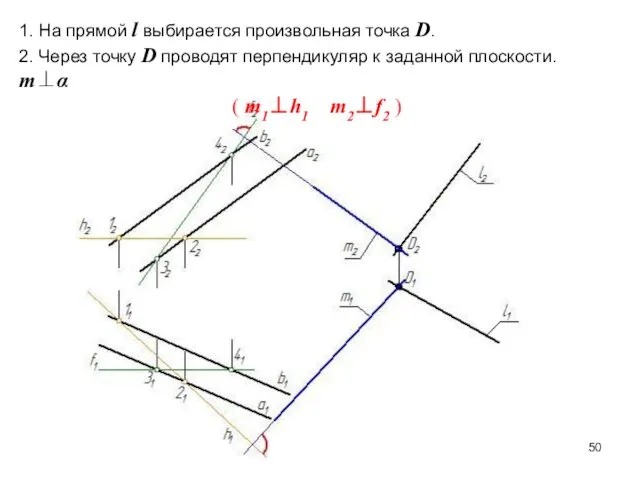
1. На прямой l выбирается произвольная точка D.
2. Через точку D
1. На прямой l выбирается произвольная точка D.
2. Через точку D
3. В плоскости, образованной прямыми m и l, проводят горизонталь
3. В плоскости, образованной прямыми m и l, проводят горизонталь
6. Способом замены плоскостей проекций определяют истинную
величину радиуса вращения
6. Способом замены плоскостей проекций определяют истинную
величину радиуса вращения
7. Выполняют поворот точки D до совмещения с плоскостью уровня,
в
7. Выполняют поворот точки D до совмещения с плоскостью уровня,
в

10. Достраивают угол ψ до прямого и отмечают угол φ.
10. Достраивают угол ψ до прямого и отмечают угол φ.
Угол между плоскостями
∠ φ = α^β
ψ = 180° - φ
D –
Угол между плоскостями
∠ φ = α^β
ψ = 180° - φ
D –

Угол между плоскостями
Исходные данные
Заданы плоскости α(h,f) и β(a,b)
Угол между плоскостями
Исходные данные
Заданы плоскости α(h,f) и β(a,b)
1. Вводится произвольная точка D.
2. Через точку D проводят перпендикуляры к
1. Вводится произвольная точка D.
2. Через точку D проводят перпендикуляры к
3. В плоскости, образованной прямыми m и n, проводят горизонталь
3. В плоскости, образованной прямыми m и n, проводят горизонталь

6. Способом замены плоскостей проекций определяют истинную
величину радиуса вращения
6. Способом замены плоскостей проекций определяют истинную
величину радиуса вращения
7. Выполняют поворот точки D до совмещения с плоскостью уровня,
в
7. Выполняют поворот точки D до совмещения с плоскостью уровня,
в
 Стадии проектирования зданий. Маркировка строительных чертежей (лекция №2)
Стадии проектирования зданий. Маркировка строительных чертежей (лекция №2) Виды, разрезы, сечения
Виды, разрезы, сечения Деталирование сборочного чертежа
Деталирование сборочного чертежа Детали болтового соединения
Детали болтового соединения Дополнительные модули и плагины
Дополнительные модули и плагины Нанесение размеров. Краткие сведения из ГОСТ 2.307-68. (Лекция 2)
Нанесение размеров. Краткие сведения из ГОСТ 2.307-68. (Лекция 2) Резьба. Классификация резьбы. Изображение и обозначение резьбы на чертежах
Резьба. Классификация резьбы. Изображение и обозначение резьбы на чертежах Технический рисунок
Технический рисунок Чтение чертежа общего вида
Чтение чертежа общего вида Алгоритм построения чертежа, содержащего сечения
Алгоритм построения чертежа, содержащего сечения Построение третьего вида по двум данным
Построение третьего вида по двум данным Основы автоматизированного проектирования
Основы автоматизированного проектирования Лінії креслення
Лінії креслення Чтение сборочных чертежей
Чтение сборочных чертежей Аксонометрические проекции
Аксонометрические проекции Техническое черчение. Контрольная работа
Техническое черчение. Контрольная работа Инженерная графика 1 семестр
Инженерная графика 1 семестр Аксонометрические проекции
Аксонометрические проекции Задачи 22-33 по инженерной графике
Задачи 22-33 по инженерной графике Изображения: виды, разрезы, сечения
Изображения: виды, разрезы, сечения Лестницы, их виды и основные элементы
Лестницы, их виды и основные элементы Прямоугольное проецирование. Расположение видов на чертеже
Прямоугольное проецирование. Расположение видов на чертеже Проецирование плоскости
Проецирование плоскости Тени в ортогональных проекциях
Тени в ортогональных проекциях Правила нанесения размеров на чертеж
Правила нанесения размеров на чертеж Сборочный чертёж изделия
Сборочный чертёж изделия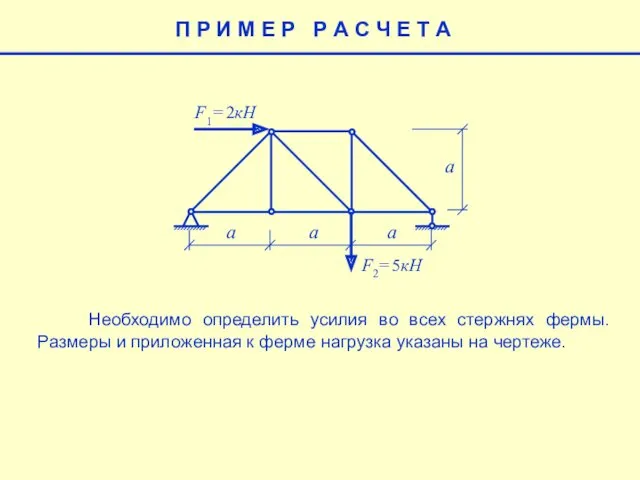 Определить усилия во всех стержнях фермы методом вырезания узлов
Определить усилия во всех стержнях фермы методом вырезания узлов