- Аналитическая механика. Связи

Содержание
- 2. Лекция 13 (продолжение – 13.2) ■ Возможные перемещения – бесконечно малые перемещения, допускаемые наложенными на систему
- 3. Лекция 13 (продолжение – 13.3) 17 ■ Примеры использования принципа возможных перемещений для определения реакций связей:
- 4. 18 Лекция 14 ■ Общее уравнение динамики – Принцип возможных перемещений, дающий общий метод решения задач
- 5. Лекция 14 (продолжение – 14.2) ■ Обобщенные силы – следующий шаг к обобщению, а именно, механического
- 6. Лекция 14 (продолжение – 14.3) ■ Пример вычисления обобщенных сил – Для механической системы трех грузов
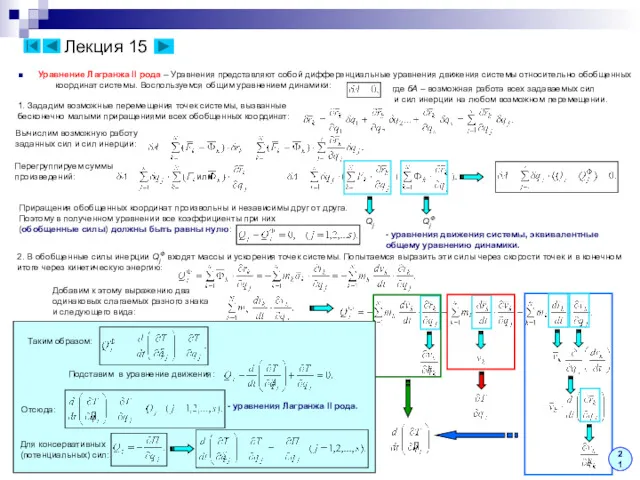
- 7. 21 Лекция 15 ■ Уравнение Лагранжа II рода – Уравнения представляют собой дифференциальные уравнения движения системы
- 8. Лекция 15 (продолжение – 15.2) 22 ■ Кинетический потенциал – функция, определяемая выражением: L = T
- 9. Лекция 15 (продолжение – 15.3) 23 2. Обобщенные силы Q1, Q2 были вычислены в примере: 3.
- 10. Лекция 15 (продолжение – 15.4, дополнительный материал) 24 ■ Вариационный принцип Гамильтона-Остроградского – устанавливает, какому соотношению
- 11. Лекция 15 (продолжение – 15.5, дополнительный материал) 25 ■ Вывод уравнения Лагранжа из вариационного принципа Гамильтона-Остроградского
- 13. Скачать презентацию
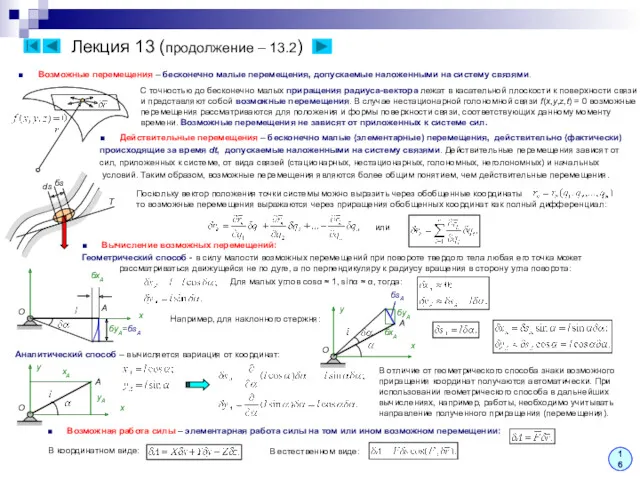
Лекция 13 (продолжение – 13.2)
■ Возможные перемещения – бесконечно малые перемещения,
Лекция 13 (продолжение – 13.2)
■ Возможные перемещения – бесконечно малые перемещения,
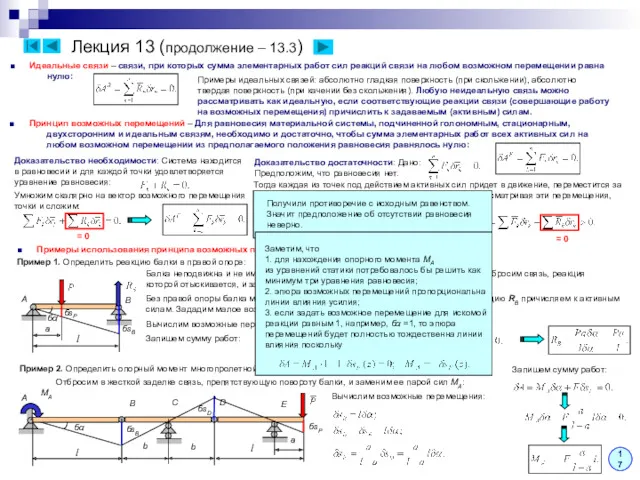
Лекция 13 (продолжение – 13.3)
17
■ Примеры использования принципа возможных перемещений для
Лекция 13 (продолжение – 13.3)
17
■ Примеры использования принципа возможных перемещений для
18
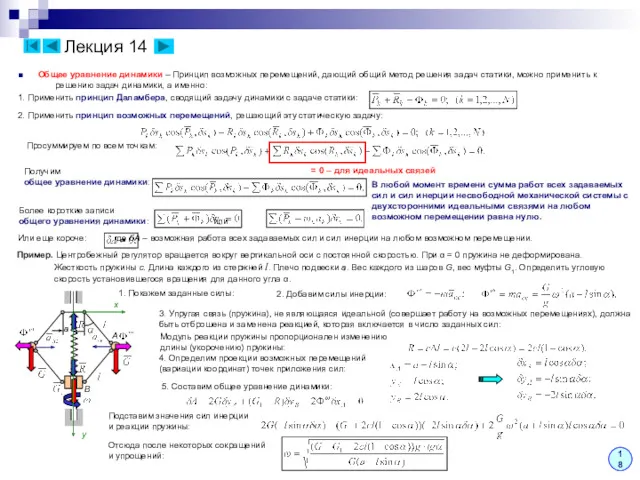
Лекция 14
■ Общее уравнение динамики – Принцип возможных перемещений, дающий общий
18
Лекция 14
■ Общее уравнение динамики – Принцип возможных перемещений, дающий общий
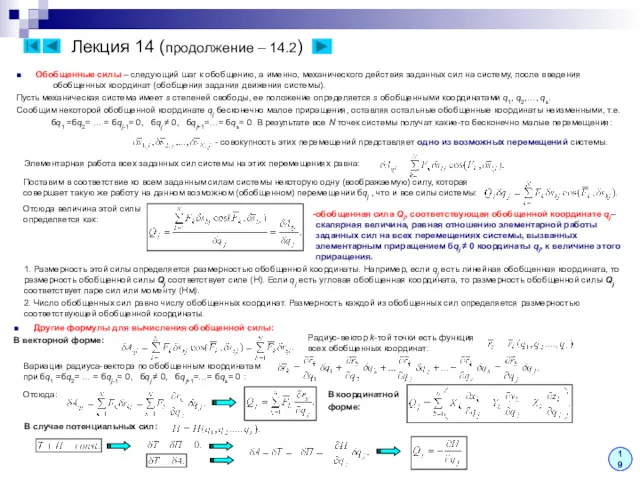
Лекция 14 (продолжение – 14.2)
■ Обобщенные силы – следующий шаг к
Лекция 14 (продолжение – 14.2)
■ Обобщенные силы – следующий шаг к
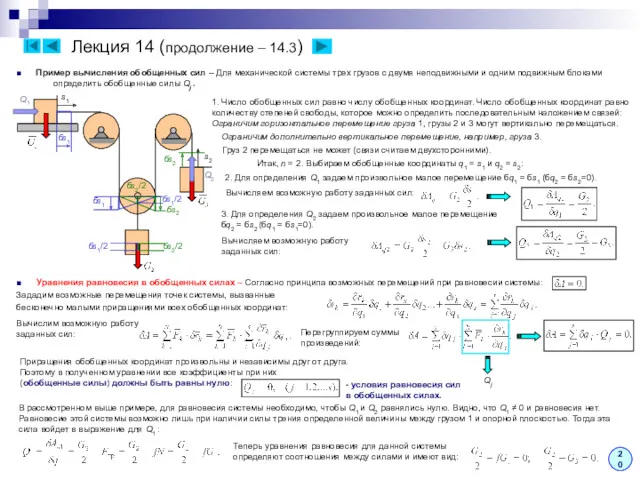
Лекция 14 (продолжение – 14.3)
■ Пример вычисления обобщенных сил – Для
Лекция 14 (продолжение – 14.3)
■ Пример вычисления обобщенных сил – Для
21
Лекция 15
■ Уравнение Лагранжа II рода – Уравнения представляют собой дифференциальные
21
Лекция 15
■ Уравнение Лагранжа II рода – Уравнения представляют собой дифференциальные
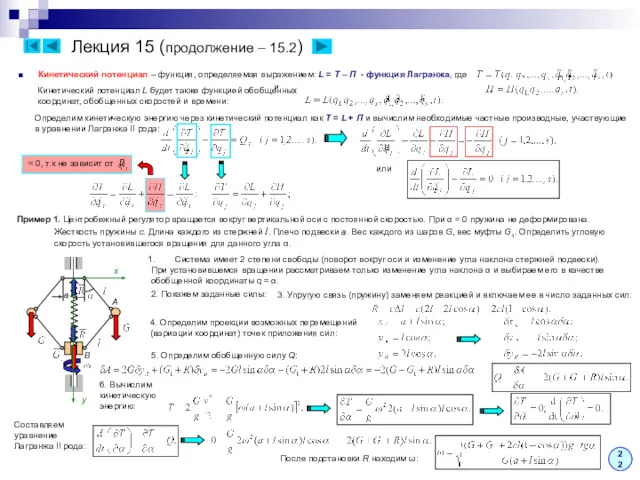
Лекция 15 (продолжение – 15.2)
22
■ Кинетический потенциал – функция, определяемая выражением:
Лекция 15 (продолжение – 15.2)
22
■ Кинетический потенциал – функция, определяемая выражением:
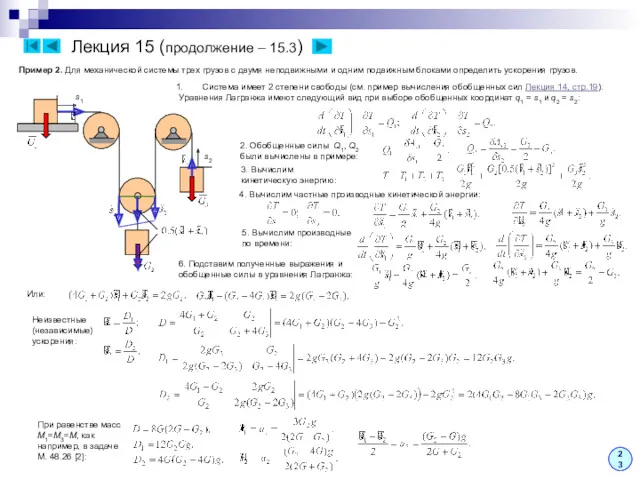
Лекция 15 (продолжение – 15.3)
23
2. Обобщенные силы Q1, Q2
были вычислены
Лекция 15 (продолжение – 15.3)
23
2. Обобщенные силы Q1, Q2
были вычислены
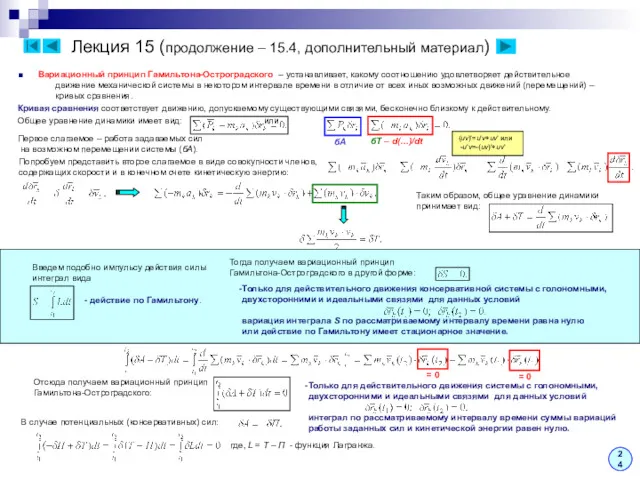
Лекция 15 (продолжение – 15.4, дополнительный материал)
24
■ Вариационный принцип Гамильтона-Остроградского –
Лекция 15 (продолжение – 15.4, дополнительный материал)
24
■ Вариационный принцип Гамильтона-Остроградского –
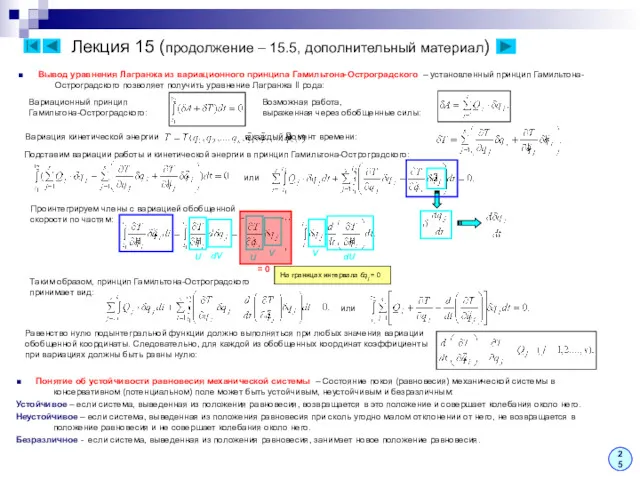
Лекция 15 (продолжение – 15.5, дополнительный материал)
25
■ Вывод уравнения Лагранжа из
Лекция 15 (продолжение – 15.5, дополнительный материал)
25
■ Вывод уравнения Лагранжа из
 Авиационный механик (авиационный техник-механик, авиамеханик)
Авиационный механик (авиационный техник-механик, авиамеханик) Простые механизмы
Простые механизмы Презетнация для урока по физике 11 класс Соединение проводников
Презетнация для урока по физике 11 класс Соединение проводников Электризация тел. Два рода зарядов
Электризация тел. Два рода зарядов Приборы и методы радиометрических измерений
Приборы и методы радиометрических измерений Да здравствует физика!
Да здравствует физика! Forces and Motion If I were…
Forces and Motion If I were… Электромагнитные колебания. Основные понятия
Электромагнитные колебания. Основные понятия Законы Ньютона. Импульс
Законы Ньютона. Импульс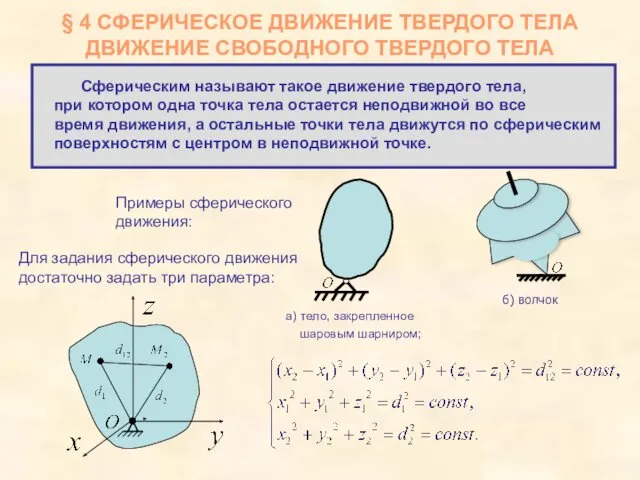 Сферическое движение твердого тела движение свободного твердого тела
Сферическое движение твердого тела движение свободного твердого тела Силы в механике. Законы Ньютона
Силы в механике. Законы Ньютона Шаровая молния
Шаровая молния Проблемное обучение в преподавании физики
Проблемное обучение в преподавании физики Экспериментальные методы исследования частиц
Экспериментальные методы исследования частиц Influence of supply voltage on torque–speed curve
Influence of supply voltage on torque–speed curve ЭМК Колебательный контур
ЭМК Колебательный контур Масова частка речовини у розчині
Масова частка речовини у розчині Ядерная энергетика. 9 класс
Ядерная энергетика. 9 класс Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Механические и электромагнитные колебания и волны. (Раздел 07)
Механические и электромагнитные колебания и волны. (Раздел 07) Гидравлический домкрат в быту
Гидравлический домкрат в быту Электроемкость. Задачи
Электроемкость. Задачи Конструкция автомобиля. Коробка передач. Назначение и типы. Общее устройство и принцип работы
Конструкция автомобиля. Коробка передач. Назначение и типы. Общее устройство и принцип работы Переходные процессы в линейных электрических цепях
Переходные процессы в линейных электрических цепях Измерители механических напряжений гребного вала и счетчики топлива
Измерители механических напряжений гребного вала и счетчики топлива Расчёт ферм
Расчёт ферм Литография
Литография Изотопы. Радиоактивные превращения атомных ядер
Изотопы. Радиоактивные превращения атомных ядер