- Астродинамика. Движение космических аппаратов по орбите

Содержание
- 2. 1. ЗАДАЧА ДВУХ ТЕЛ. ОСНОВНЫЕ УРАВНЕНИЯ И ПАРАМЕТРЫ ОРБИТ 2. КАЧЕСТВЕННЫЙ АНАЛИЗ ОРБИТАЛЬНОГО ДВИЖЕНИЯ 3. КРИВИЗНА
- 3. КРАТКИЙ ИСТОРИЧЕСКИЙ ОБЗОР В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Астродинамика – изучение
- 4. ЗАКОНЫ КЕПЛЕРА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Первый закон Кеплера Орбита
- 5. УРАВНЕНИЯ ЗАДАЧИ ДВУХ ТЕЛ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Сила взаимодействия
- 6. ОСНОВНОЕ УРАВНЕНИЕ ЗАДАЧИ ДВУХ ТЕЛ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Основное
- 7. ИНТЕГРАЛ ЭНЕРГИИ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Интеграл энергии получается умножением
- 8. ИНТЕГРАЛ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ (ИНТЕГРАЛ ПЛОЩАДЕЙ) В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 9. ИНТЕГРАЛ ЛАПЛАСА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Интеграл Лапласа получается векторным
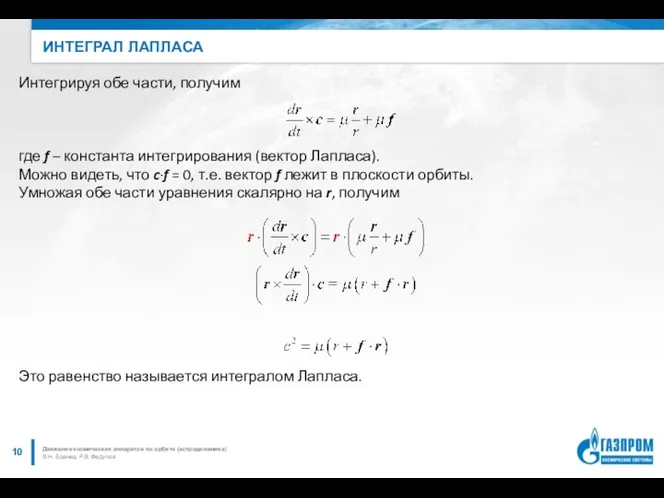
- 10. ИНТЕГРАЛ ЛАПЛАСА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Интегрируя обе части, получим
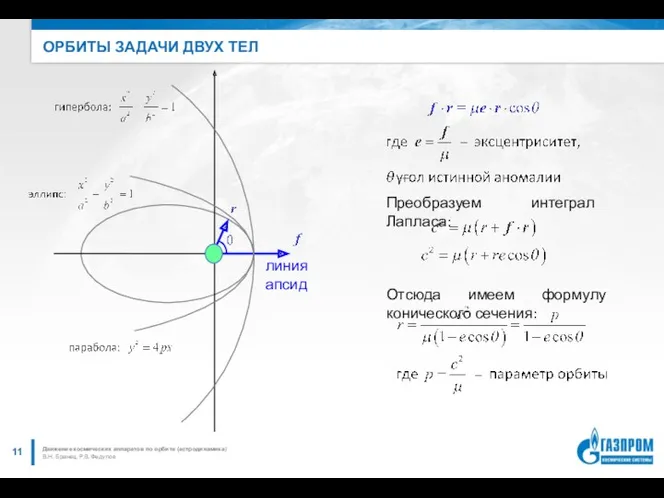
- 11. ОРБИТЫ ЗАДАЧИ ДВУХ ТЕЛ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Преобразуем интеграл
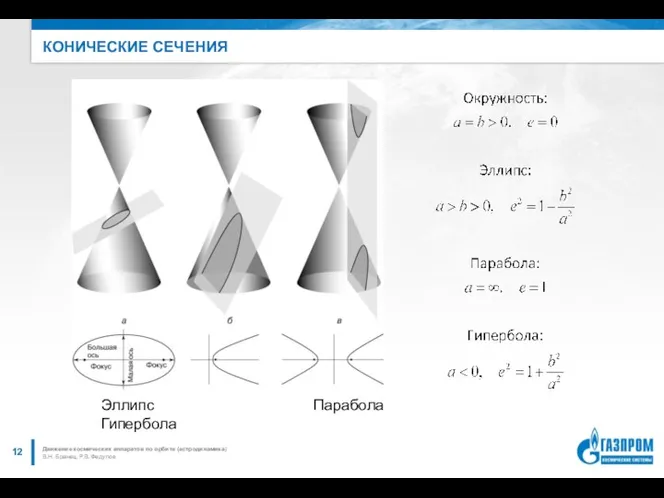
- 12. КОНИЧЕСКИЕ СЕЧЕНИЯ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Эллипс Парабола Гипербола
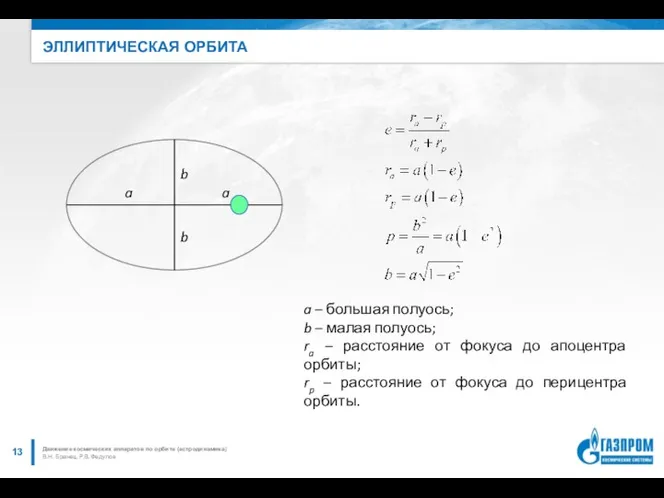
- 13. ЭЛЛИПТИЧЕСКАЯ ОРБИТА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) a b a –
- 14. ИНТЕГРАЛЫ ПЛОЩАДЕЙ И ЭНЕРГИИ ЧЕРЕЗ ПАРАМЕТРЫ ОРБИТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите
- 15. ИНТЕГРАЛ ЭНЕРГИИ ЧЕРЕЗ ПАРАМЕТРЫ ОРБИТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Для
- 16. ШЕСТОЙ ИНТЕГРАЛ – ВРЕМЯ ПРОХОЖДЕНИЯ ПЕРИЦЕНТРА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 17. ИТОГО ШЕСТЬ ИНТЕГРАЛОВ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Интеграл энергии; Интеграл
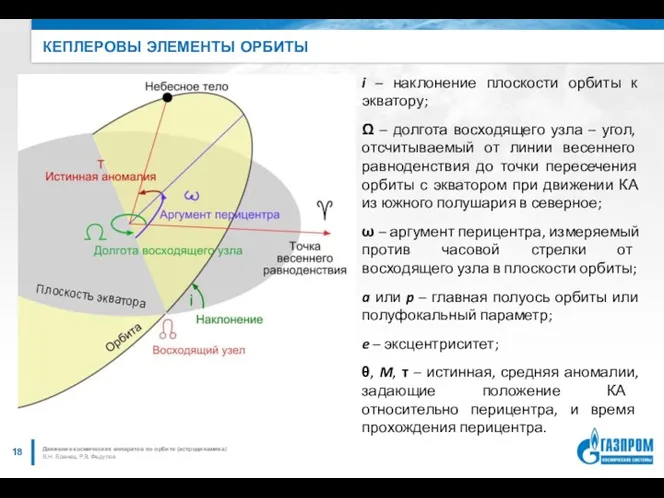
- 18. КЕПЛЕРОВЫ ЭЛЕМЕНТЫ ОРБИТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Плоскость экватора i
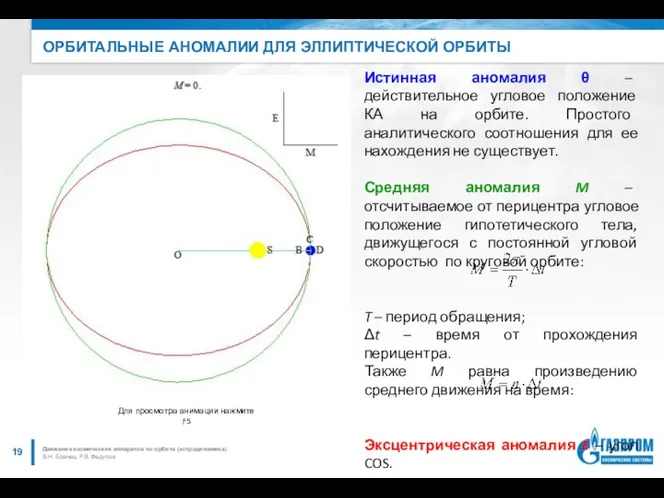
- 19. ОРБИТАЛЬНЫЕ АНОМАЛИИ ДЛЯ ЭЛЛИПТИЧЕСКОЙ ОРБИТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Истинная
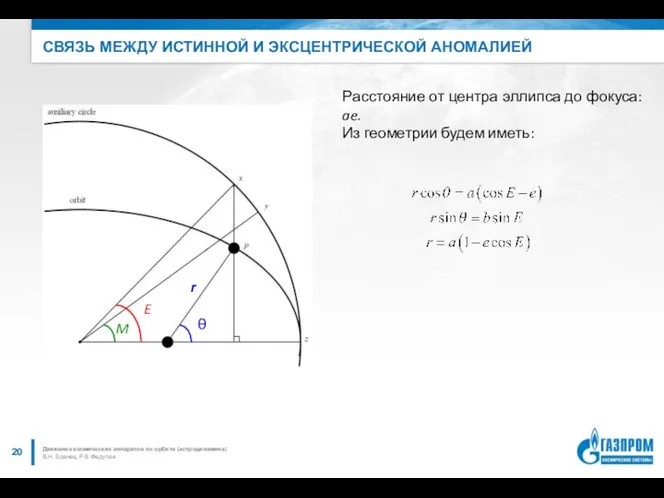
- 20. СВЯЗЬ МЕЖДУ ИСТИННОЙ И ЭКСЦЕНТРИЧЕСКОЙ АНОМАЛИЕЙ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
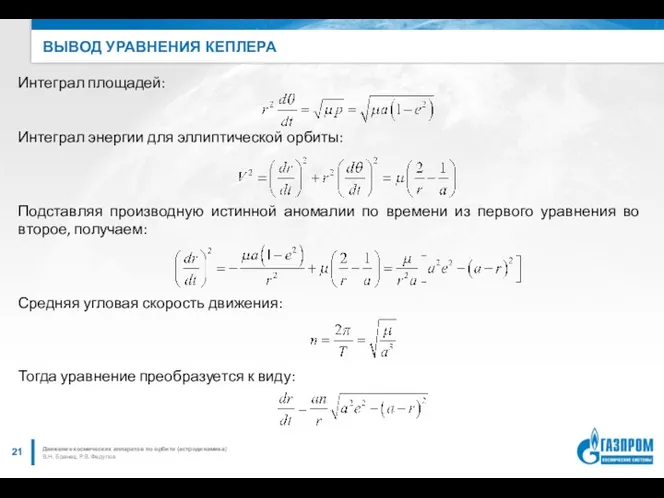
- 21. ВЫВОД УРАВНЕНИЯ КЕПЛЕРА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Интеграл площадей: Интеграл
- 22. УРАВНЕНИЕ КЕПЛЕРА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Интегрируем: Это уравнение называется
- 23. ЗАДАЧА: ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО НАЧАЛЬНЫМ УСЛОВИЯМ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 24. ОПРЕДЕЛЕНИЕ ОРБИТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) На момент t0 будем
- 25. ПОЛОЖЕНИЕ И СКОРОСТЬ ТЕЛА НА ОРБИТЕ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 26. ФОРМУЛЫ БЭТТИНА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Ричард Бэттин предложил формулы
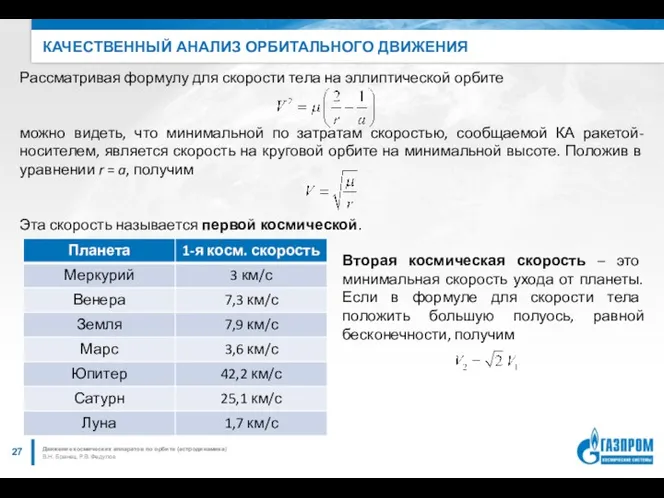
- 27. КАЧЕСТВЕННЫЙ АНАЛИЗ ОРБИТАЛЬНОГО ДВИЖЕНИЯ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Рассматривая формулу
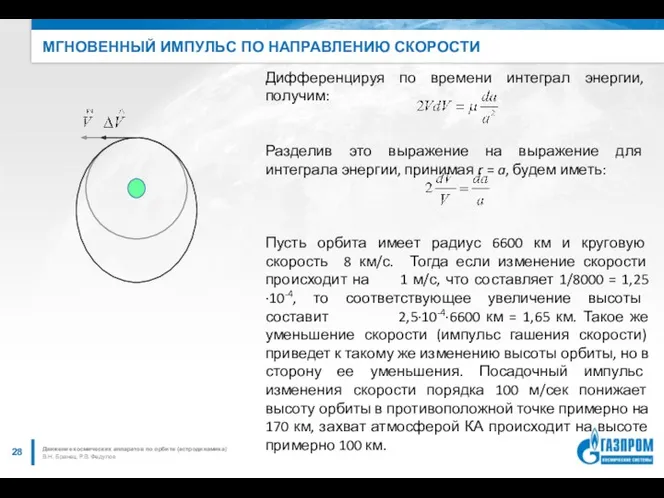
- 28. МГНОВЕННЫЙ ИМПУЛЬС ПО НАПРАВЛЕНИЮ СКОРОСТИ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Дифференцируя
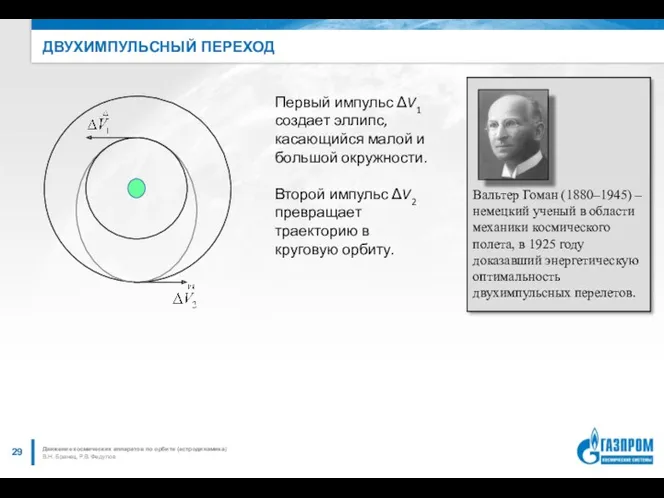
- 29. ДВУХИМПУЛЬСНЫЙ ПЕРЕХОД В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Первый импульс ΔV1 создает
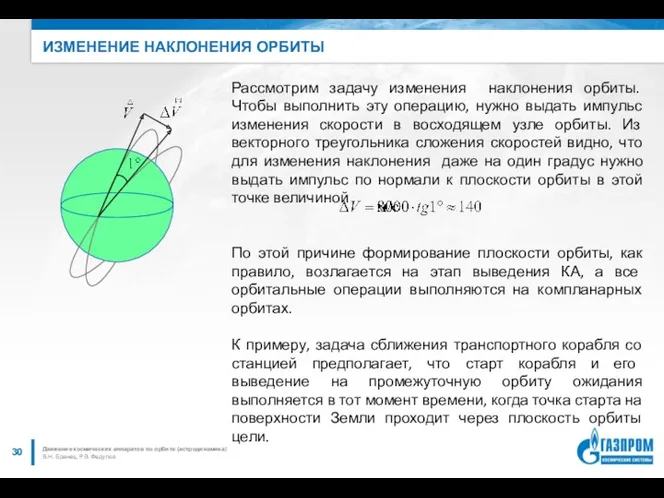
- 30. ИЗМЕНЕНИЕ НАКЛОНЕНИЯ ОРБИТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Рассмотрим задачу изменения
- 31. СХЕМА ВЫВЕДЕНИЯ «ЯМАЛ-300К» НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 32. МЕЖПЛАНЕТНЫЕ ПЕРЕЛЕТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Уход с орбиты Земли
- 33. ХАРАКТЕРИСТИЧЕСКАЯ СКОРОСТЬ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Характеристическая скорость миссии –
- 34. ХАРАКТЕРИСТИЧЕСКАЯ СКОРОСТЬ МИССИИ «АПОЛЛОН» В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
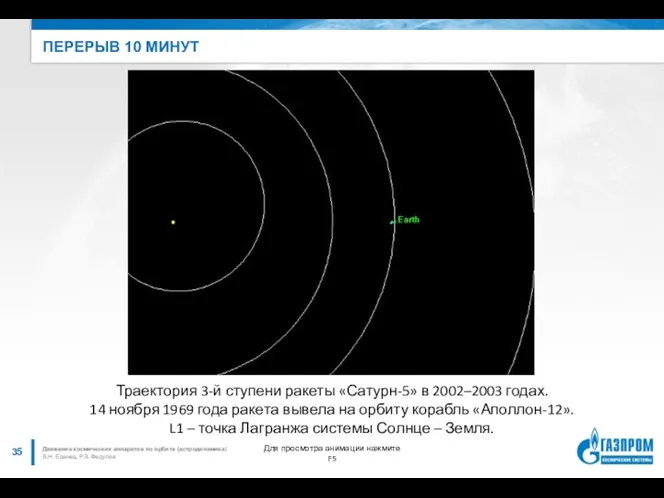
- 35. ПЕРЕРЫВ 10 МИНУТ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Траектория 3-й ступени
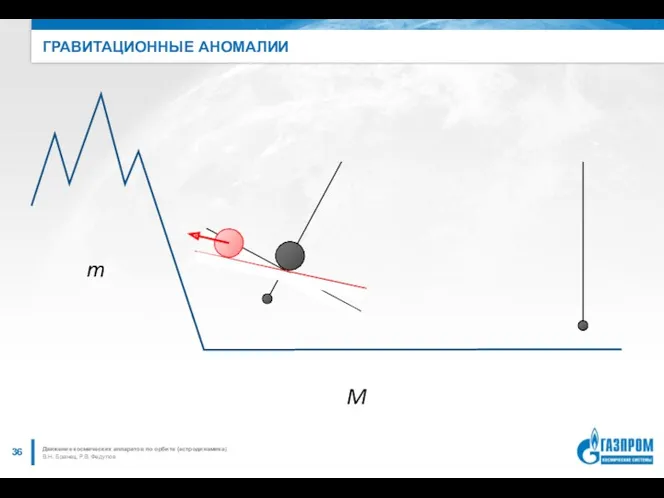
- 36. ГРАВИТАЦИОННЫЕ АНОМАЛИИ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
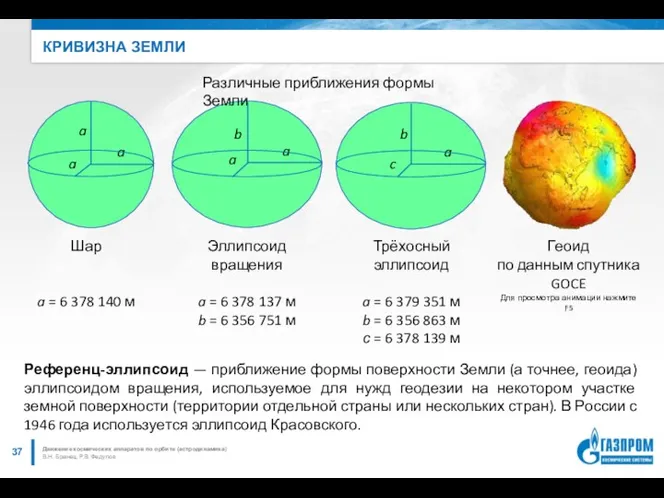
- 37. КРИВИЗНА ЗЕМЛИ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Шар a = 6
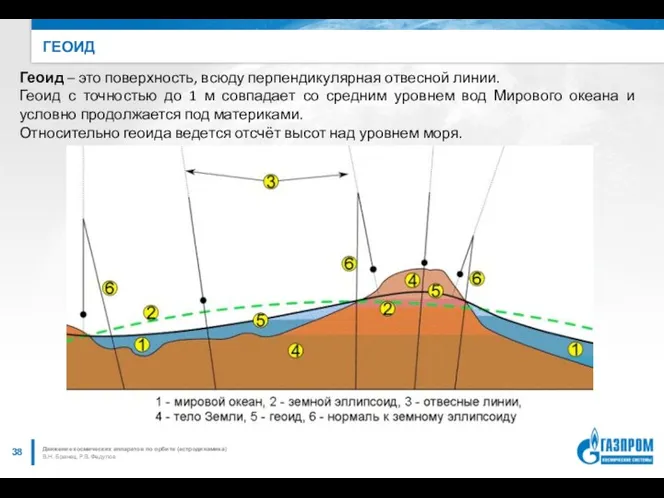
- 38. ГЕОИД В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Геоид – это поверхность, всюду
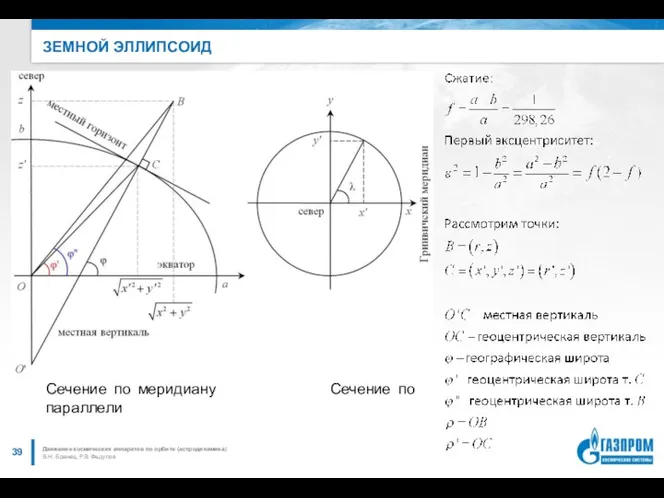
- 39. ЗЕМНОЙ ЭЛЛИПСОИД В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Сечение по меридиану Сечение
- 40. СВЯЗЬ МЕЖДУ ГЕОЦЕНТРИЧЕСКОЙ И ГЕОГРАФИЧЕСКОЙ ШИРОТОЙ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 41. КООРДИНАТЫ ТОЧКИ С ЧЕРЕЗ ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 42. КООРДИНАТЫ ТОЧКИ B ЧЕРЕЗ ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 43. ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ ЧЕРЕЗ КООРДИНАТЫ ОБЪЕКТА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Выражение
- 44. ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Геоид Геоид относительно
- 45. СПУТНИК GOCE – ИССЛЕДОВАТЕЛЬ ГРАВИТАЦИОННОГО ПОЛЯ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 46. ПРИТЯЖЕНИЕ ОБЪЁМНОГО ТЕЛА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) dM γ ρ
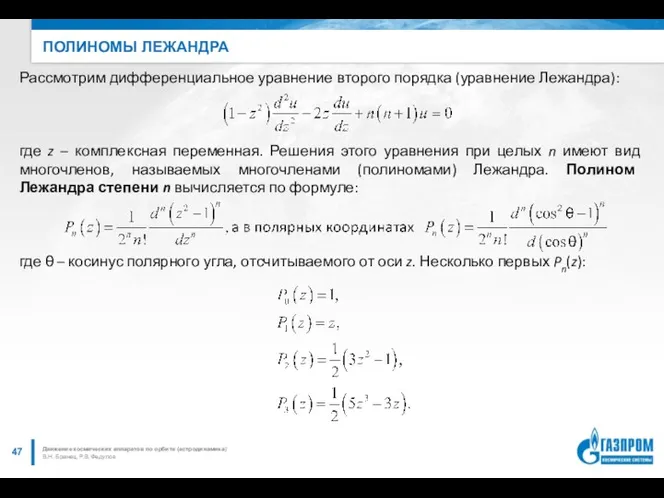
- 47. ПОЛИНОМЫ ЛЕЖАНДРА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Рассмотрим дифференциальное уравнение второго
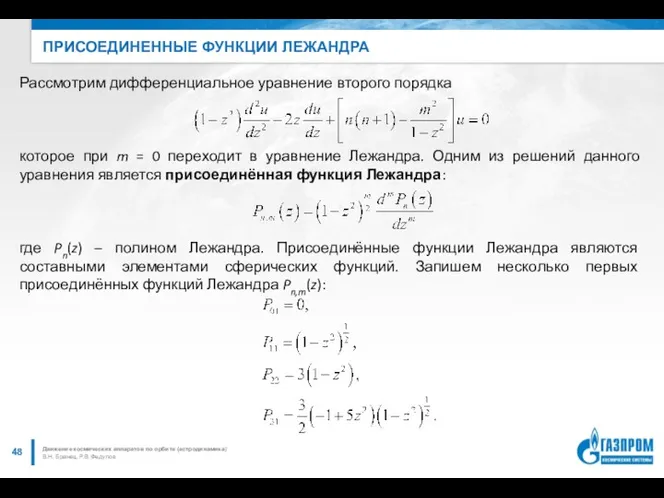
- 48. ПРИСОЕДИНЕННЫЕ ФУНКЦИИ ЛЕЖАНДРА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Рассмотрим дифференциальное уравнение
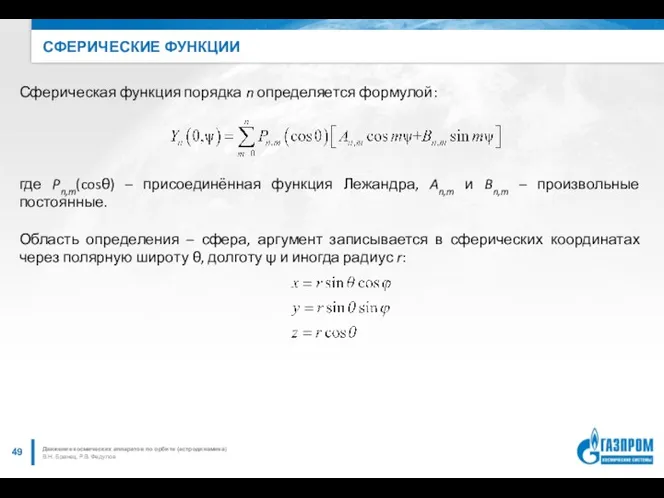
- 49. СФЕРИЧЕСКИЕ ФУНКЦИИ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Сферическая функция порядка n
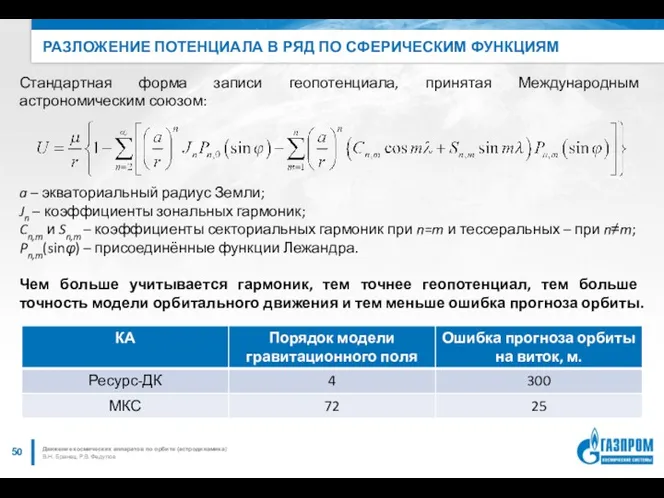
- 50. РАЗЛОЖЕНИЕ ПОТЕНЦИАЛА В РЯД ПО СФЕРИЧЕСКИМ ФУНКЦИЯМ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите
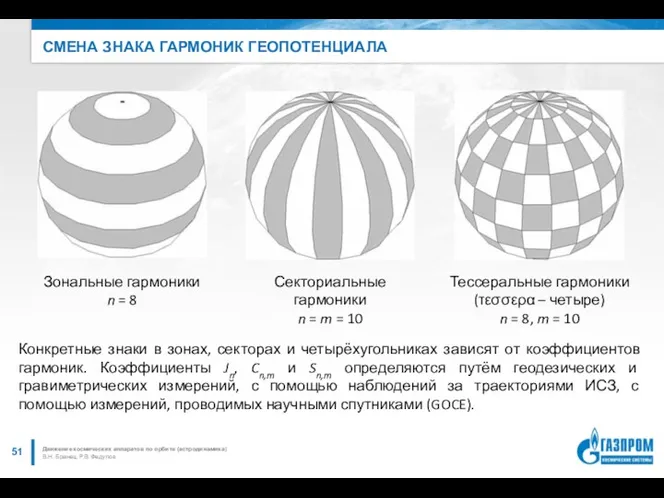
- 51. СМЕНА ЗНАКА ГАРМОНИК ГЕОПОТЕНЦИАЛА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Зональные гармоники
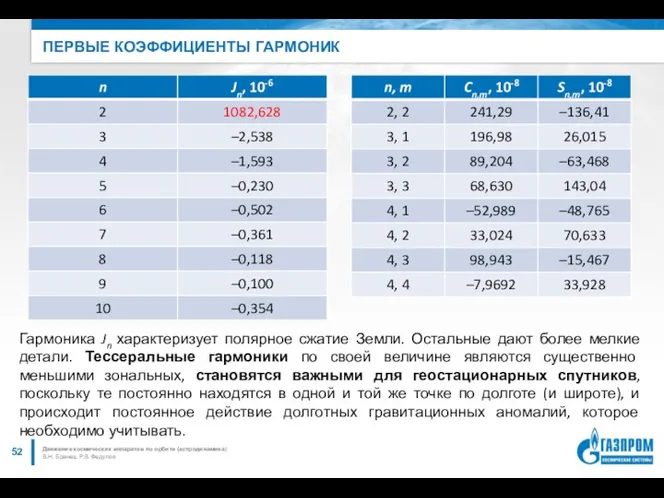
- 52. ПЕРВЫЕ КОЭФФИЦИЕНТЫ ГАРМОНИК В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Гармоника Jn характеризует
- 53. УЧЕТ ВОЗМУЩЕНИЙ В ВЫЧИСЛЕНИИ ОРБИТ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Уравнение
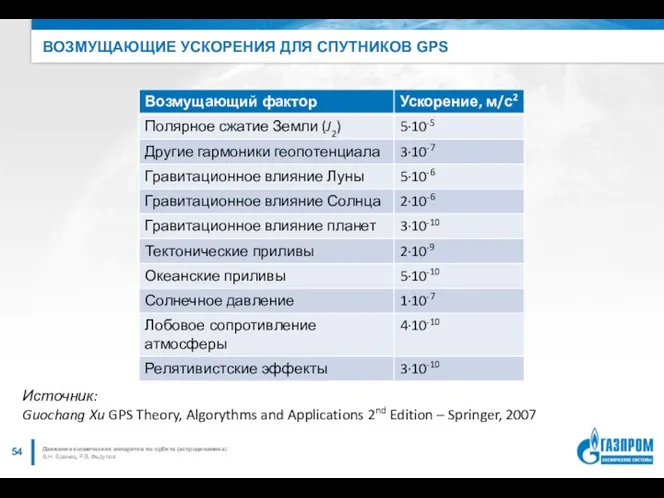
- 54. ВОЗМУЩАЮЩИЕ УСКОРЕНИЯ ДЛЯ СПУТНИКОВ GPS В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Источник:
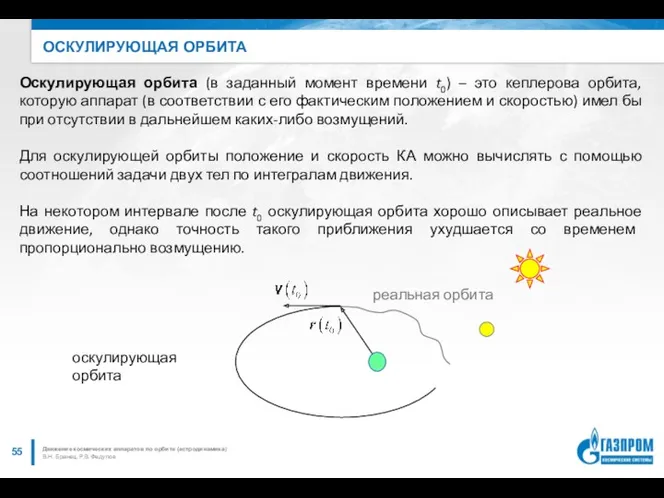
- 55. ОСКУЛИРУЮЩАЯ ОРБИТА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Оскулирующая орбита (в заданный
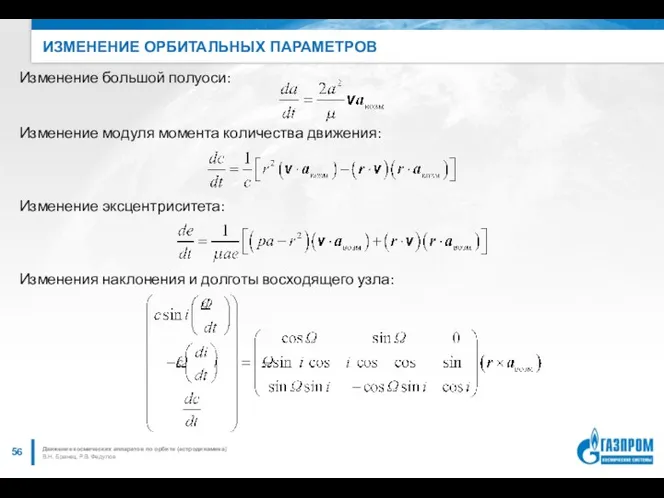
- 56. ИЗМЕНЕНИЕ ОРБИТАЛЬНЫХ ПАРАМЕТРОВ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Изменение большой полуоси:
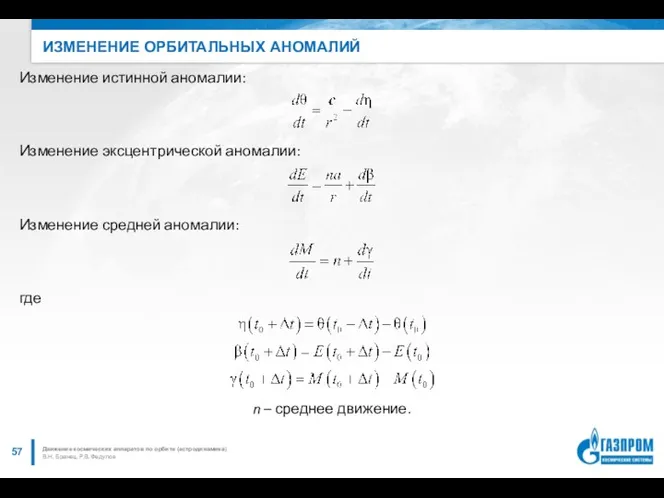
- 57. ИЗМЕНЕНИЕ ОРБИТАЛЬНЫХ АНОМАЛИЙ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Изменение истинной аномалии:
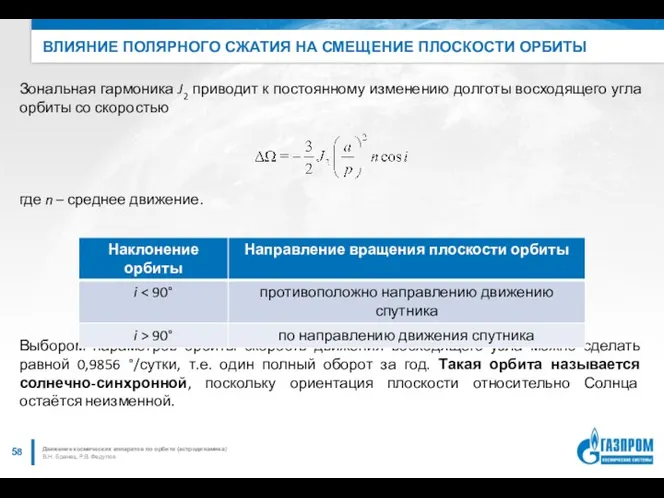
- 58. ВЛИЯНИЕ ПОЛЯРНОГО СЖАТИЯ НА СМЕЩЕНИЕ ПЛОСКОСТИ ОРБИТЫ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите
- 59. ВЛИЯНИЕ ПОЛЯРНОГО СЖАТИЯ НА СМЕЩЕНИЕ ПЕРИГЕЯ В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика)
- 60. ЛИТЕРАТУРА В.Н. Бранец, Р.В. Федулов Движение космических аппаратов по орбите (астродинамика) Бранец В.Н., Севастьянов Н.Н., Федулов
- 62. Скачать презентацию
1. ЗАДАЧА ДВУХ ТЕЛ. ОСНОВНЫЕ УРАВНЕНИЯ И ПАРАМЕТРЫ ОРБИТ
2. КАЧЕСТВЕННЫЙ АНАЛИЗ
1. ЗАДАЧА ДВУХ ТЕЛ. ОСНОВНЫЕ УРАВНЕНИЯ И ПАРАМЕТРЫ ОРБИТ 2. КАЧЕСТВЕННЫЙ АНАЛИЗ
КРАТКИЙ ИСТОРИЧЕСКИЙ ОБЗОР
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Астродинамика
КРАТКИЙ ИСТОРИЧЕСКИЙ ОБЗОР
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Астродинамика
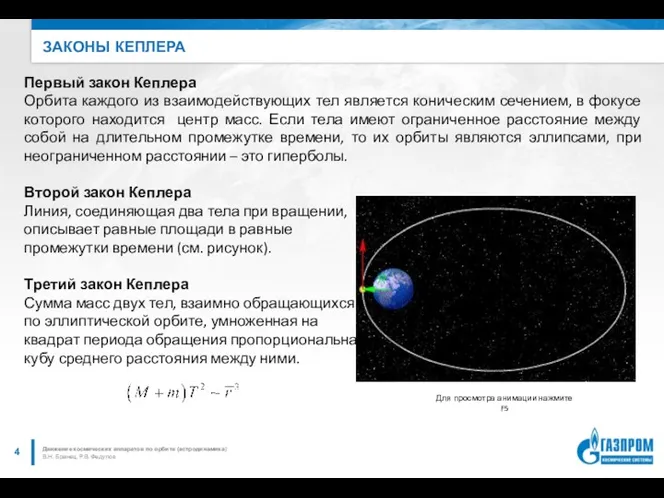
ЗАКОНЫ КЕПЛЕРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Первый закон
ЗАКОНЫ КЕПЛЕРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Первый закон
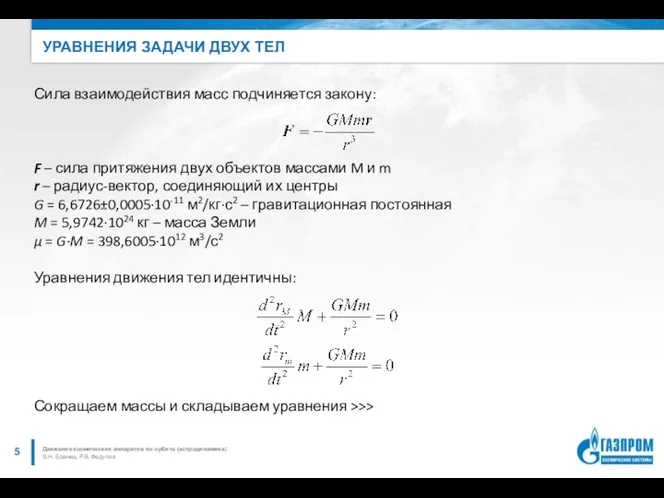
УРАВНЕНИЯ ЗАДАЧИ ДВУХ ТЕЛ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
УРАВНЕНИЯ ЗАДАЧИ ДВУХ ТЕЛ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
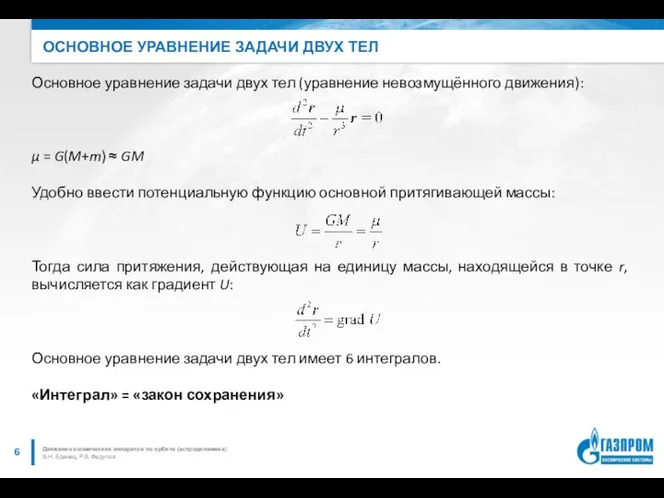
ОСНОВНОЕ УРАВНЕНИЕ ЗАДАЧИ ДВУХ ТЕЛ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ОСНОВНОЕ УРАВНЕНИЕ ЗАДАЧИ ДВУХ ТЕЛ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
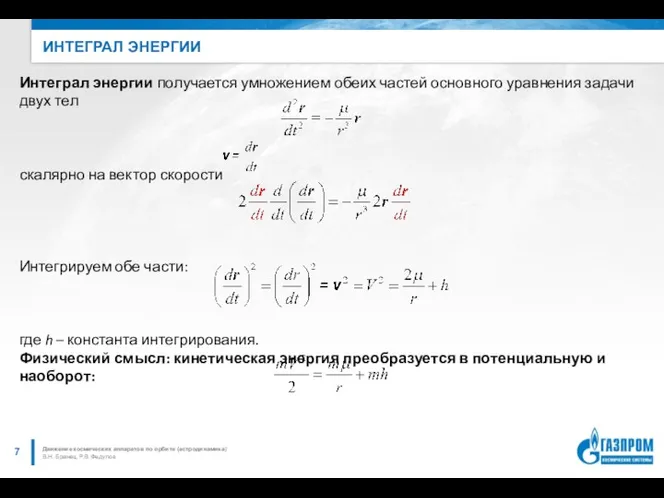
ИНТЕГРАЛ ЭНЕРГИИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл энергии
ИНТЕГРАЛ ЭНЕРГИИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл энергии
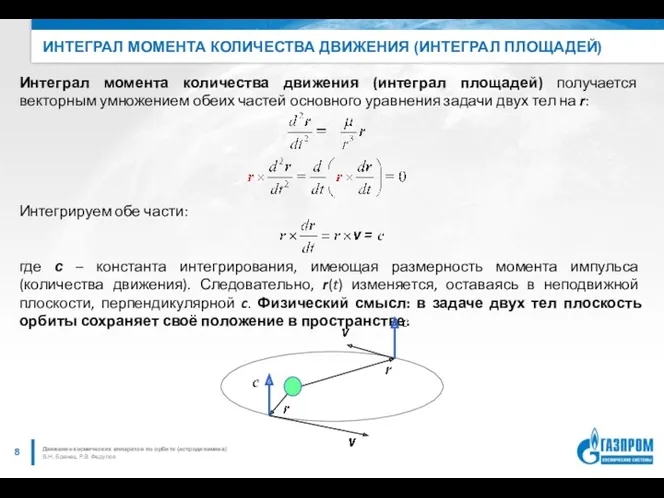
ИНТЕГРАЛ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ (ИНТЕГРАЛ ПЛОЩАДЕЙ)
В.Н. Бранец, Р.В. Федулов
Движение космических
ИНТЕГРАЛ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ (ИНТЕГРАЛ ПЛОЩАДЕЙ)
В.Н. Бранец, Р.В. Федулов
Движение космических
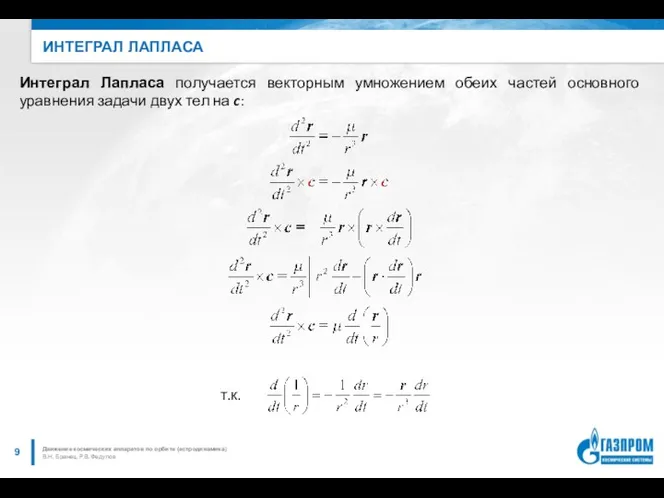
ИНТЕГРАЛ ЛАПЛАСА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл Лапласа
ИНТЕГРАЛ ЛАПЛАСА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл Лапласа
ИНТЕГРАЛ ЛАПЛАСА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интегрируя обе
ИНТЕГРАЛ ЛАПЛАСА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интегрируя обе
ОРБИТЫ ЗАДАЧИ ДВУХ ТЕЛ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
ОРБИТЫ ЗАДАЧИ ДВУХ ТЕЛ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
КОНИЧЕСКИЕ СЕЧЕНИЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Эллипс Парабола
КОНИЧЕСКИЕ СЕЧЕНИЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Эллипс Парабола
ЭЛЛИПТИЧЕСКАЯ ОРБИТА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
a
b
a –
ЭЛЛИПТИЧЕСКАЯ ОРБИТА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
a
b
a –
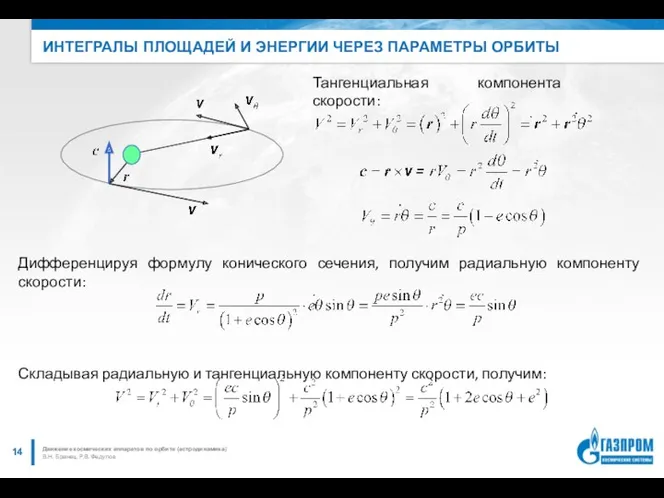
ИНТЕГРАЛЫ ПЛОЩАДЕЙ И ЭНЕРГИИ ЧЕРЕЗ ПАРАМЕТРЫ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических
ИНТЕГРАЛЫ ПЛОЩАДЕЙ И ЭНЕРГИИ ЧЕРЕЗ ПАРАМЕТРЫ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических
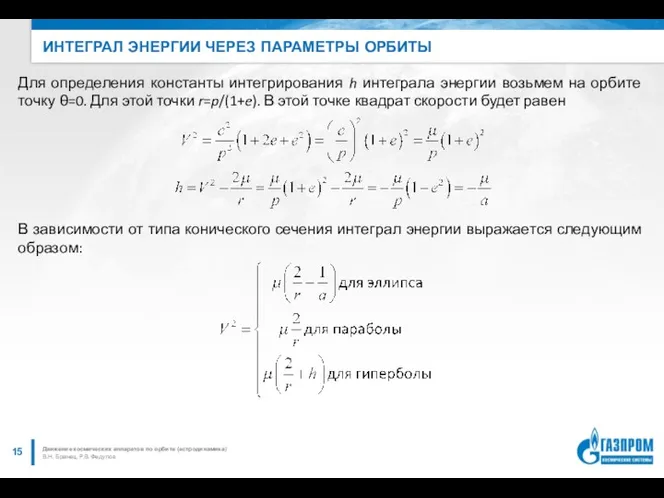
ИНТЕГРАЛ ЭНЕРГИИ ЧЕРЕЗ ПАРАМЕТРЫ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ИНТЕГРАЛ ЭНЕРГИИ ЧЕРЕЗ ПАРАМЕТРЫ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
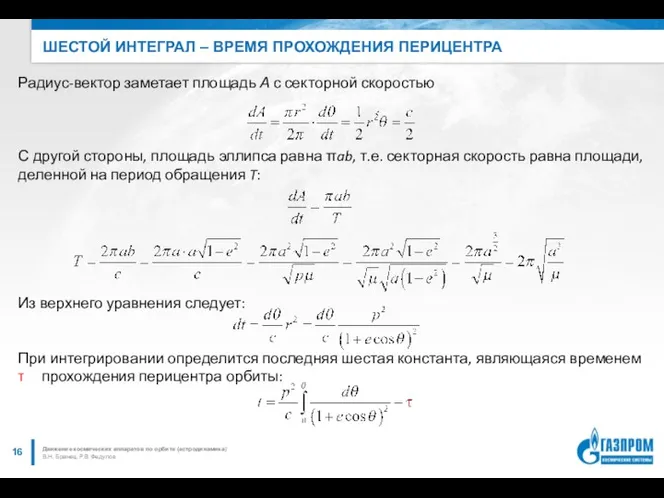
ШЕСТОЙ ИНТЕГРАЛ – ВРЕМЯ ПРОХОЖДЕНИЯ ПЕРИЦЕНТРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
ШЕСТОЙ ИНТЕГРАЛ – ВРЕМЯ ПРОХОЖДЕНИЯ ПЕРИЦЕНТРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
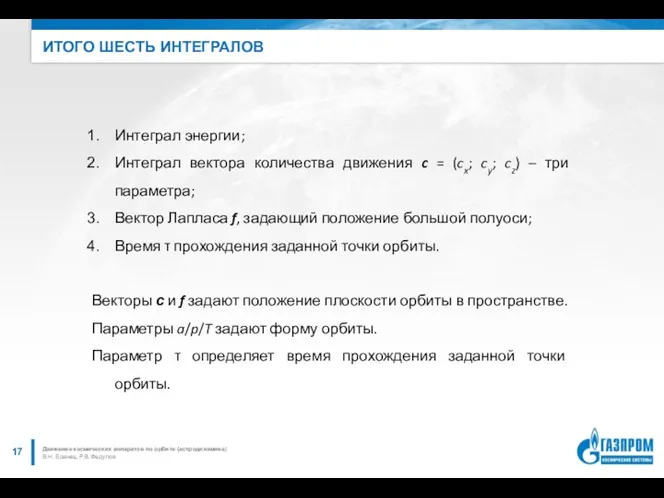
ИТОГО ШЕСТЬ ИНТЕГРАЛОВ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл
ИТОГО ШЕСТЬ ИНТЕГРАЛОВ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл
КЕПЛЕРОВЫ ЭЛЕМЕНТЫ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Плоскость
КЕПЛЕРОВЫ ЭЛЕМЕНТЫ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Плоскость
ОРБИТАЛЬНЫЕ АНОМАЛИИ ДЛЯ ЭЛЛИПТИЧЕСКОЙ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ОРБИТАЛЬНЫЕ АНОМАЛИИ ДЛЯ ЭЛЛИПТИЧЕСКОЙ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
СВЯЗЬ МЕЖДУ ИСТИННОЙ И ЭКСЦЕНТРИЧЕСКОЙ АНОМАЛИЕЙ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
СВЯЗЬ МЕЖДУ ИСТИННОЙ И ЭКСЦЕНТРИЧЕСКОЙ АНОМАЛИЕЙ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
ВЫВОД УРАВНЕНИЯ КЕПЛЕРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл
ВЫВОД УРАВНЕНИЯ КЕПЛЕРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интеграл
УРАВНЕНИЕ КЕПЛЕРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
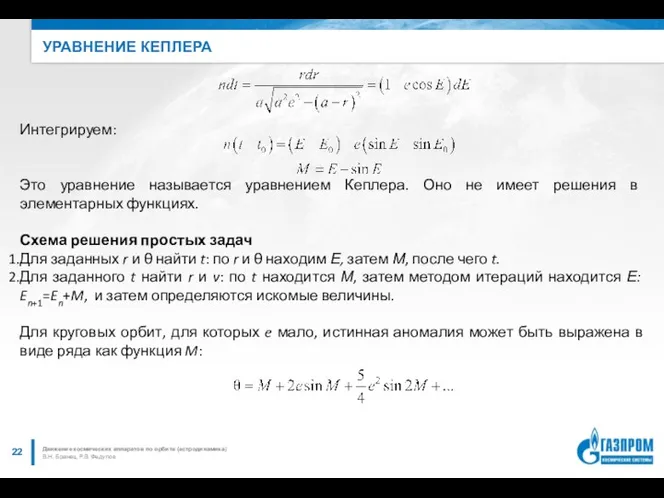
Интегрируем:
Это уравнение
УРАВНЕНИЕ КЕПЛЕРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Интегрируем:
Это уравнение
ЗАДАЧА: ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО НАЧАЛЬНЫМ УСЛОВИЯМ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
ЗАДАЧА: ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО НАЧАЛЬНЫМ УСЛОВИЯМ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
ОПРЕДЕЛЕНИЕ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
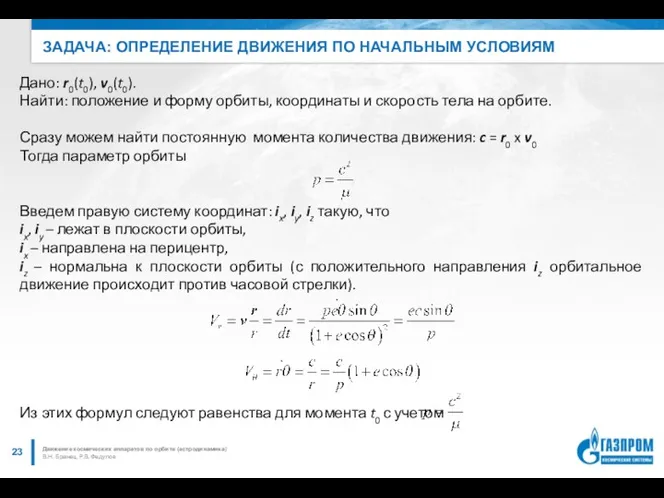
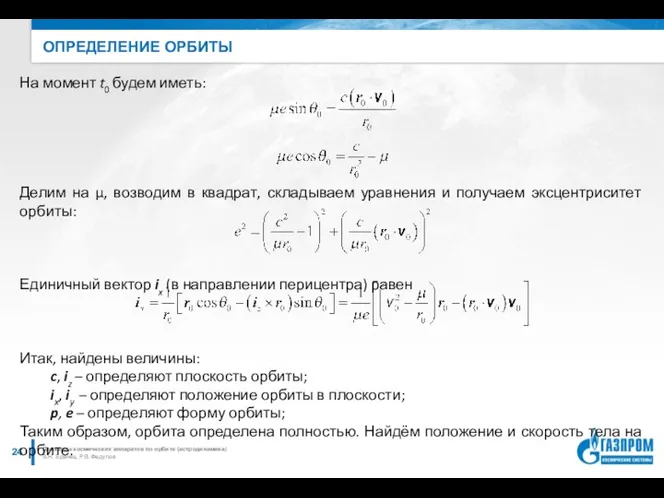
На момент
ОПРЕДЕЛЕНИЕ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
На момент
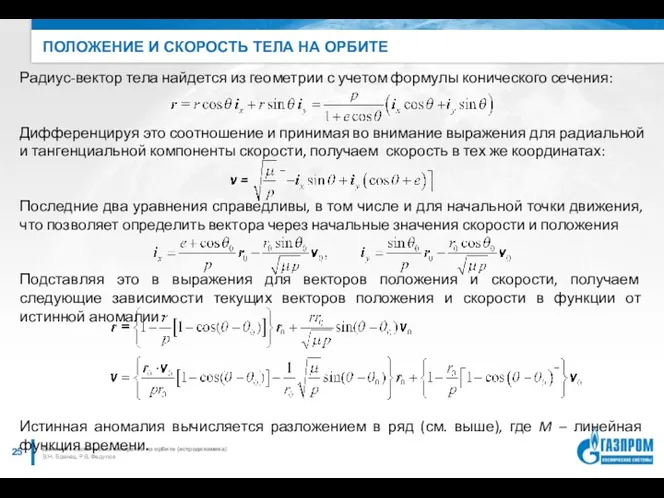
ПОЛОЖЕНИЕ И СКОРОСТЬ ТЕЛА НА ОРБИТЕ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
ПОЛОЖЕНИЕ И СКОРОСТЬ ТЕЛА НА ОРБИТЕ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
ФОРМУЛЫ БЭТТИНА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Ричард Бэттин
ФОРМУЛЫ БЭТТИНА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Ричард Бэттин
КАЧЕСТВЕННЫЙ АНАЛИЗ ОРБИТАЛЬНОГО ДВИЖЕНИЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
КАЧЕСТВЕННЫЙ АНАЛИЗ ОРБИТАЛЬНОГО ДВИЖЕНИЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
МГНОВЕННЫЙ ИМПУЛЬС ПО НАПРАВЛЕНИЮ СКОРОСТИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
МГНОВЕННЫЙ ИМПУЛЬС ПО НАПРАВЛЕНИЮ СКОРОСТИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ДВУХИМПУЛЬСНЫЙ ПЕРЕХОД
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Первый импульс
ДВУХИМПУЛЬСНЫЙ ПЕРЕХОД
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Первый импульс
ИЗМЕНЕНИЕ НАКЛОНЕНИЯ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Рассмотрим
ИЗМЕНЕНИЕ НАКЛОНЕНИЯ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Рассмотрим
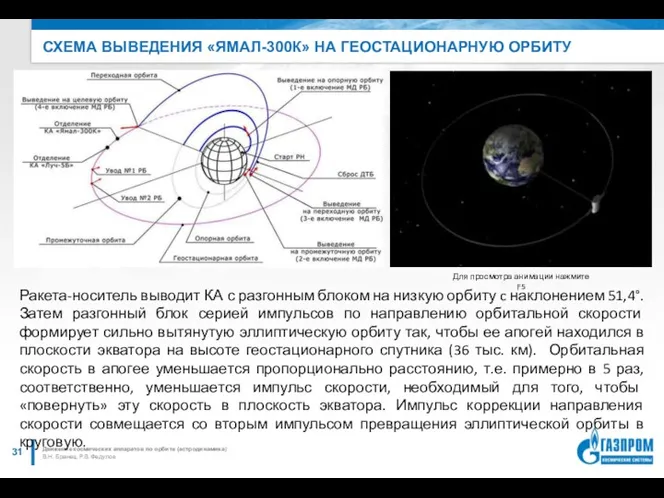
СХЕМА ВЫВЕДЕНИЯ «ЯМАЛ-300К» НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
СХЕМА ВЫВЕДЕНИЯ «ЯМАЛ-300К» НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
МЕЖПЛАНЕТНЫЕ ПЕРЕЛЕТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Уход с
МЕЖПЛАНЕТНЫЕ ПЕРЕЛЕТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Уход с
ХАРАКТЕРИСТИЧЕСКАЯ СКОРОСТЬ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Характеристическая
ХАРАКТЕРИСТИЧЕСКАЯ СКОРОСТЬ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Характеристическая

ХАРАКТЕРИСТИЧЕСКАЯ СКОРОСТЬ МИССИИ «АПОЛЛОН»
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ХАРАКТЕРИСТИЧЕСКАЯ СКОРОСТЬ МИССИИ «АПОЛЛОН»
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ПЕРЕРЫВ 10 МИНУТ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Траектория
ПЕРЕРЫВ 10 МИНУТ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Траектория
ГРАВИТАЦИОННЫЕ АНОМАЛИИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
ГРАВИТАЦИОННЫЕ АНОМАЛИИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
КРИВИЗНА ЗЕМЛИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Шар
a =
КРИВИЗНА ЗЕМЛИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Шар
a =
ГЕОИД
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Геоид – это
ГЕОИД
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Геоид – это
ЗЕМНОЙ ЭЛЛИПСОИД
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Сечение по
ЗЕМНОЙ ЭЛЛИПСОИД
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Сечение по
СВЯЗЬ МЕЖДУ ГЕОЦЕНТРИЧЕСКОЙ И ГЕОГРАФИЧЕСКОЙ ШИРОТОЙ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
СВЯЗЬ МЕЖДУ ГЕОЦЕНТРИЧЕСКОЙ И ГЕОГРАФИЧЕСКОЙ ШИРОТОЙ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
КООРДИНАТЫ ТОЧКИ С ЧЕРЕЗ ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
КООРДИНАТЫ ТОЧКИ С ЧЕРЕЗ ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
КООРДИНАТЫ ТОЧКИ B ЧЕРЕЗ ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
КООРДИНАТЫ ТОЧКИ B ЧЕРЕЗ ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
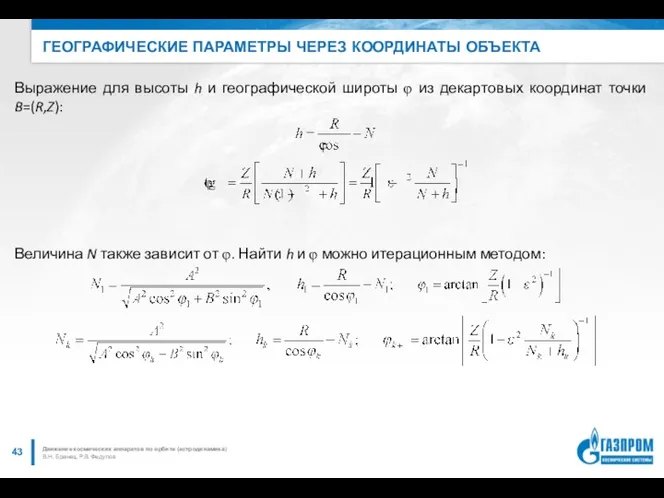
ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ ЧЕРЕЗ КООРДИНАТЫ ОБЪЕКТА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ГЕОГРАФИЧЕСКИЕ ПАРАМЕТРЫ ЧЕРЕЗ КООРДИНАТЫ ОБЪЕКТА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
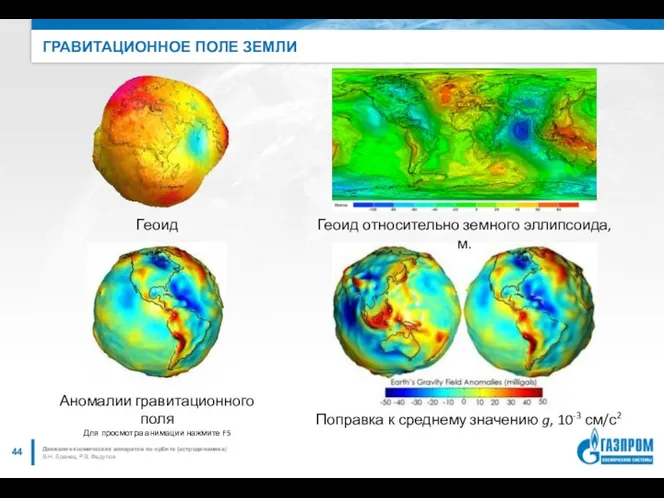
ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Геоид
Геоид
ГРАВИТАЦИОННОЕ ПОЛЕ ЗЕМЛИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Геоид
Геоид
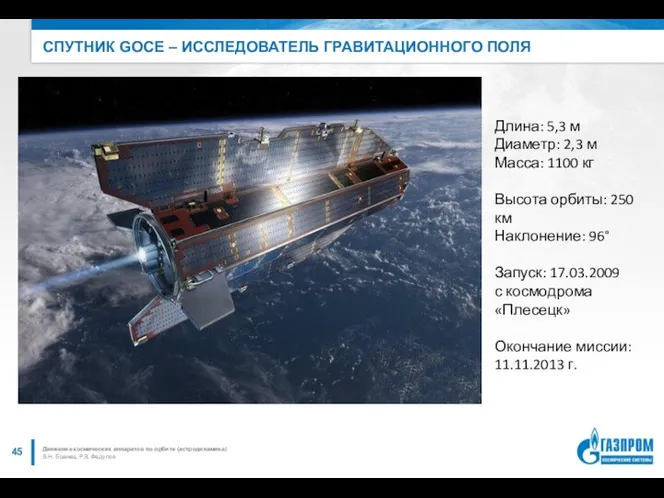
СПУТНИК GOCE – ИССЛЕДОВАТЕЛЬ ГРАВИТАЦИОННОГО ПОЛЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
СПУТНИК GOCE – ИССЛЕДОВАТЕЛЬ ГРАВИТАЦИОННОГО ПОЛЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
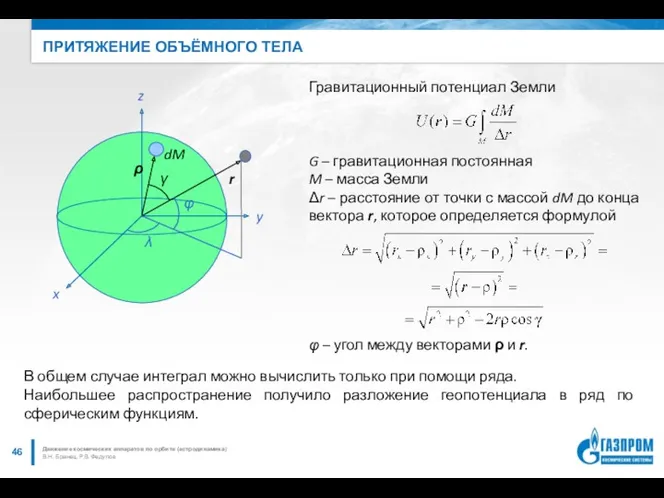
ПРИТЯЖЕНИЕ ОБЪЁМНОГО ТЕЛА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
dM
γ
ρ
r
x
y
z
Гравитационный
ПРИТЯЖЕНИЕ ОБЪЁМНОГО ТЕЛА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
dM
γ
ρ
r
x
y
z
Гравитационный
ПОЛИНОМЫ ЛЕЖАНДРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Рассмотрим дифференциальное
ПОЛИНОМЫ ЛЕЖАНДРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Рассмотрим дифференциальное
ПРИСОЕДИНЕННЫЕ ФУНКЦИИ ЛЕЖАНДРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Рассмотрим
ПРИСОЕДИНЕННЫЕ ФУНКЦИИ ЛЕЖАНДРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Рассмотрим
СФЕРИЧЕСКИЕ ФУНКЦИИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Сферическая функция
СФЕРИЧЕСКИЕ ФУНКЦИИ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Сферическая функция
РАЗЛОЖЕНИЕ ПОТЕНЦИАЛА В РЯД ПО СФЕРИЧЕСКИМ ФУНКЦИЯМ
В.Н. Бранец, Р.В. Федулов
Движение космических
РАЗЛОЖЕНИЕ ПОТЕНЦИАЛА В РЯД ПО СФЕРИЧЕСКИМ ФУНКЦИЯМ
В.Н. Бранец, Р.В. Федулов
Движение космических
СМЕНА ЗНАКА ГАРМОНИК ГЕОПОТЕНЦИАЛА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
СМЕНА ЗНАКА ГАРМОНИК ГЕОПОТЕНЦИАЛА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите
ПЕРВЫЕ КОЭФФИЦИЕНТЫ ГАРМОНИК
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Гармоника
ПЕРВЫЕ КОЭФФИЦИЕНТЫ ГАРМОНИК
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Гармоника
УЧЕТ ВОЗМУЩЕНИЙ В ВЫЧИСЛЕНИИ ОРБИТ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
УЧЕТ ВОЗМУЩЕНИЙ В ВЫЧИСЛЕНИИ ОРБИТ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ВОЗМУЩАЮЩИЕ УСКОРЕНИЯ ДЛЯ СПУТНИКОВ GPS
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ВОЗМУЩАЮЩИЕ УСКОРЕНИЯ ДЛЯ СПУТНИКОВ GPS
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по
ОСКУЛИРУЮЩАЯ ОРБИТА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Оскулирующая орбита
ОСКУЛИРУЮЩАЯ ОРБИТА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Оскулирующая орбита
ИЗМЕНЕНИЕ ОРБИТАЛЬНЫХ ПАРАМЕТРОВ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Изменение
ИЗМЕНЕНИЕ ОРБИТАЛЬНЫХ ПАРАМЕТРОВ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Изменение
ИЗМЕНЕНИЕ ОРБИТАЛЬНЫХ АНОМАЛИЙ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Изменение
ИЗМЕНЕНИЕ ОРБИТАЛЬНЫХ АНОМАЛИЙ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Изменение
ВЛИЯНИЕ ПОЛЯРНОГО СЖАТИЯ НА СМЕЩЕНИЕ ПЛОСКОСТИ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических
ВЛИЯНИЕ ПОЛЯРНОГО СЖАТИЯ НА СМЕЩЕНИЕ ПЛОСКОСТИ ОРБИТЫ
В.Н. Бранец, Р.В. Федулов
Движение космических
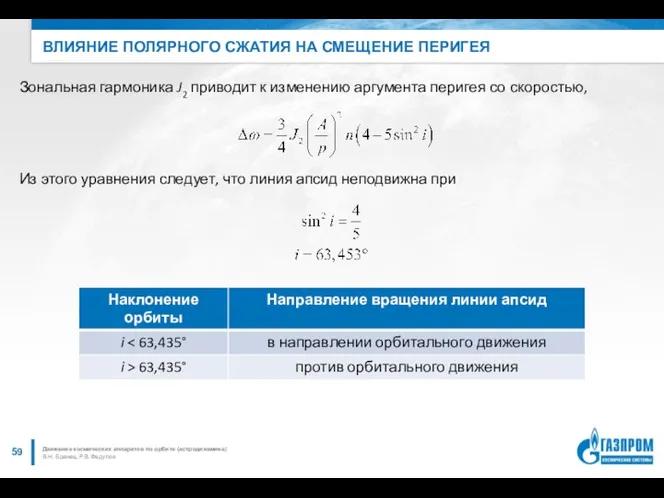
ВЛИЯНИЕ ПОЛЯРНОГО СЖАТИЯ НА СМЕЩЕНИЕ ПЕРИГЕЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
ВЛИЯНИЕ ПОЛЯРНОГО СЖАТИЯ НА СМЕЩЕНИЕ ПЕРИГЕЯ
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов
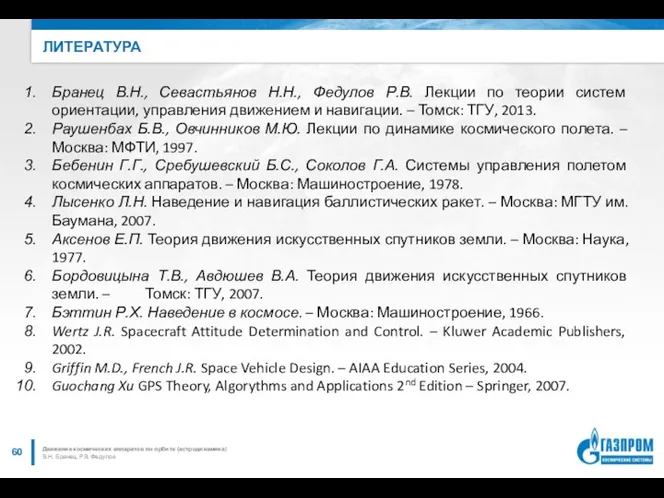
ЛИТЕРАТУРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Бранец В.Н., Севастьянов
ЛИТЕРАТУРА
В.Н. Бранец, Р.В. Федулов
Движение космических аппаратов по орбите (астродинамика)
Бранец В.Н., Севастьянов
 Правовые и нормативные основы технического сервиса колесных транспортных средств (Лекция № 2)
Правовые и нормативные основы технического сервиса колесных транспортных средств (Лекция № 2) Magnetism
Magnetism Основы гидродинамического подобия
Основы гидродинамического подобия Nuclear fuel cycle
Nuclear fuel cycle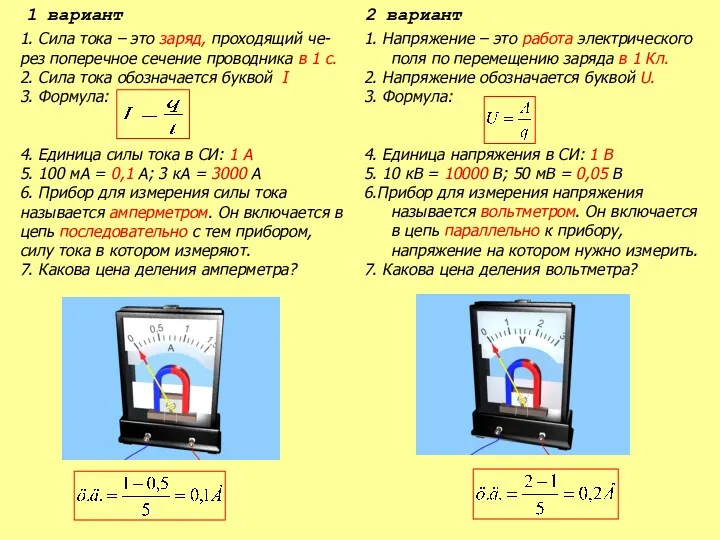 Зависимость силы тока от напряжения. Сопротивление проводника
Зависимость силы тока от напряжения. Сопротивление проводника Направление электрического тока
Направление электрического тока Что такое физика -первый урок в 7 классе
Что такое физика -первый урок в 7 классе Плотность вещества
Плотность вещества Оптичне явище - міражі
Оптичне явище - міражі Причины изменения технического состояния автомобиля (для обучающихся СПО по специальности Техник
Причины изменения технического состояния автомобиля (для обучающихся СПО по специальности Техник Теория роста. Химический состав звезд. (Тема 16)
Теория роста. Химический состав звезд. (Тема 16) Упругие свойства
Упругие свойства Плазма
Плазма Основные понятия и определения в электротехнике
Основные понятия и определения в электротехнике Виштовхувальна сила. Закон Архімеда
Виштовхувальна сила. Закон Архімеда Магнитное поле. 8 класс
Магнитное поле. 8 класс метод разработка мех колебания
метод разработка мех колебания Асинхронный двигатель
Асинхронный двигатель Заттың сұйық фазадағы ерітілген концентрациясының беттік тартылысқа тәуелділігі. Беттік керілу. Дәріс 5
Заттың сұйық фазадағы ерітілген концентрациясының беттік тартылысқа тәуелділігі. Беттік керілу. Дәріс 5 20230402_11kl_dop_shutki_s_osterom
20230402_11kl_dop_shutki_s_osterom Тормозная система автомобиля
Тормозная система автомобиля Интерференция и дифракция света
Интерференция и дифракция света Магнитные свойства вещества
Магнитные свойства вещества Закон Ома для участка цепи
Закон Ома для участка цепи Законы постоянного тока
Законы постоянного тока Защита от перенапряжений в электоустановках. (Лекция 16)
Защита от перенапряжений в электоустановках. (Лекция 16) Акустика помещений
Акустика помещений Общее устройство и работа двигателя
Общее устройство и работа двигателя