- Compass - magnetic and gyro

Содержание
- 2. Deviation of Magnetic Compasses © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES
- 3. STCW – 78, as amended Requirements, stated in Tables A-II/1, A-II/2 : “ .... Compass -
- 4. SOLAS – 74, as amended Requirements, stated in Chapter V, Regulation 19 : Carriage requirements for
- 5. Panama Maritime Authority Requirements, stated in Merchant Marine Circular # 138 : Subject : Magnetic compasses
- 6. REPUBLIC OF THE MARSHALL ISLANDS Marine Notice No. 2-011-32 : SUBJECT: Magnetic Compasses Adjustment. 2.1 Magnetic
- 7. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Magnetic compasses
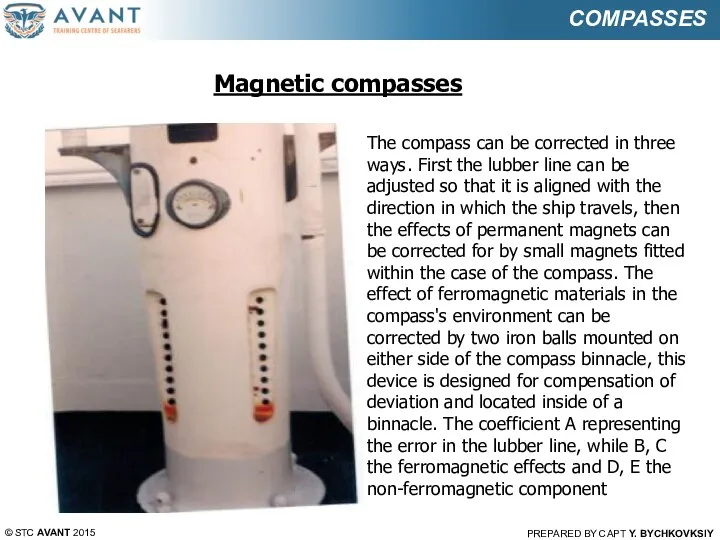
- 8. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Magnetic compasses The compass can be
- 9. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Magnetic compasses A ship under construction
- 10. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Main Reasons of Compasses Deviation 1.
- 11. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Types of deviation 1. Round deviation
- 12. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Coefficients of deviation Coefficient “B” Coefficient
- 13. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Coefficients of deviation Coefficient “C” This
- 14. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Coefficients of deviation Coefficient “D” Coefficient
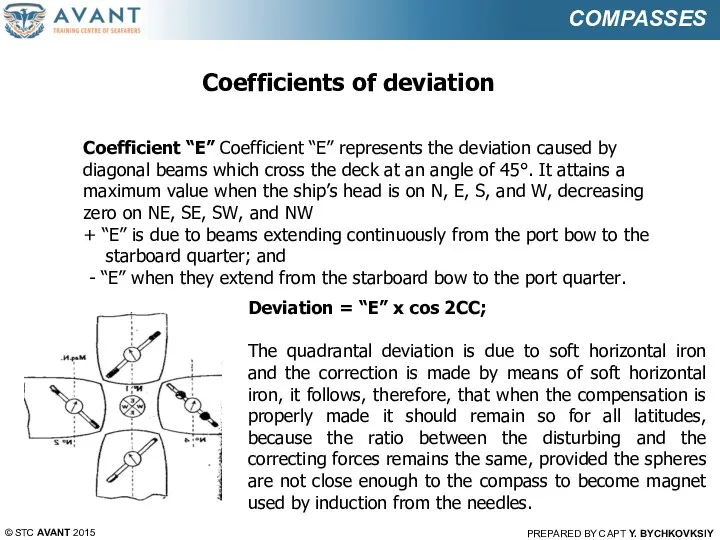
- 15. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Coefficients of deviation Coefficient “E” Coefficient
- 16. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation of deviation if there is
- 17. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation of deviation come to 270°
- 18. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation by the method of “Airy”
- 19. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation by the method of “Airy”
- 20. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation by the method of “Airy”
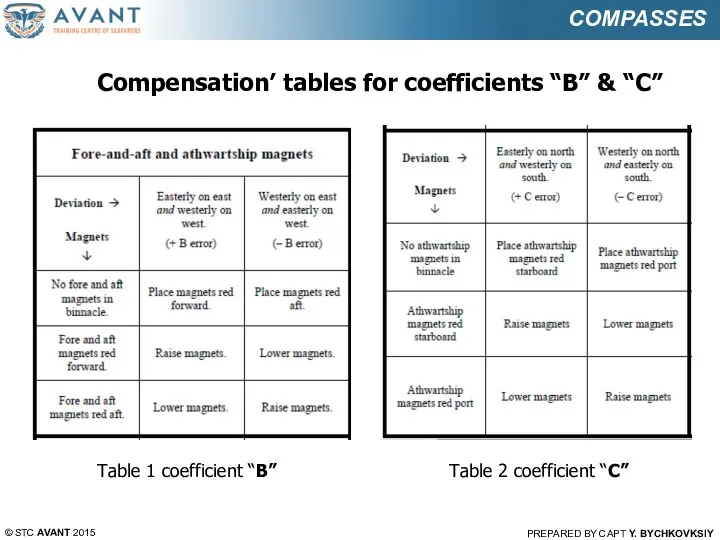
- 21. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation’ tables for coefficients “B” &
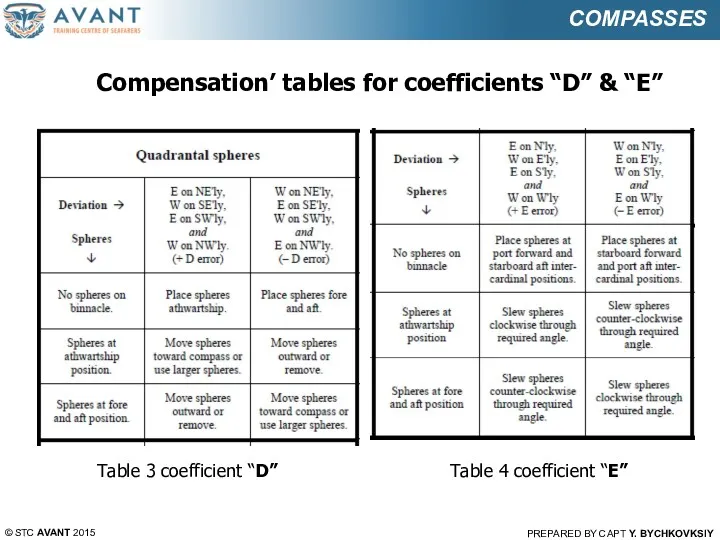
- 22. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation’ tables for coefficients “D” &
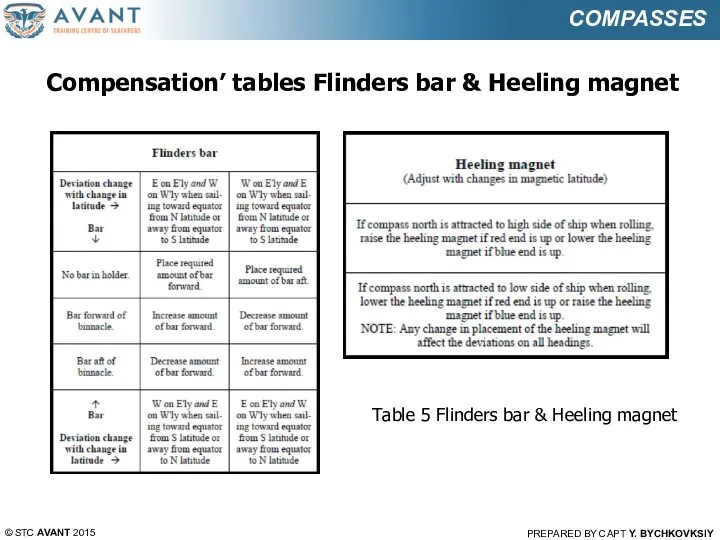
- 23. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Compensation’ tables Flinders bar & Heeling
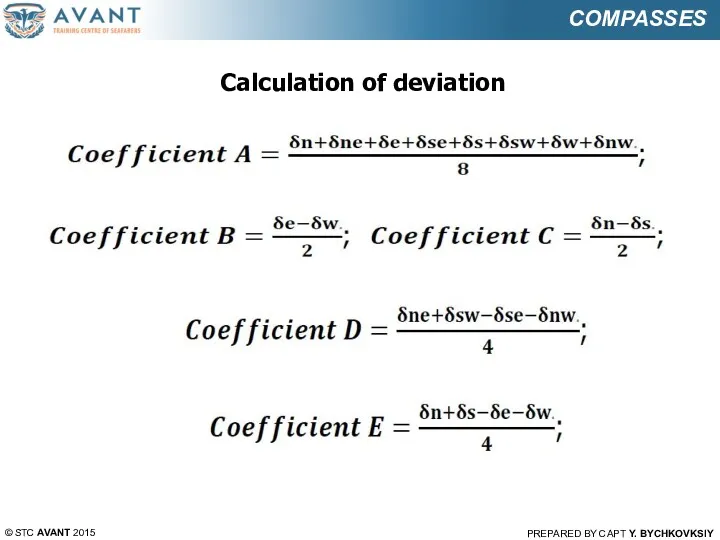
- 24. © STC AVANT 2015 PREPARED BY CAPT Y. BYCHKOVKSIY COMPASSES Calculation of deviation
- 26. Скачать презентацию
Deviation of Magnetic
Compasses
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Deviation of Magnetic
Compasses
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
STCW – 78, as amended
Requirements, stated in Tables A-II/1, A-II/2 :
“
STCW – 78, as amended
Requirements, stated in Tables A-II/1, A-II/2 :
“
SOLAS – 74, as amended
Requirements, stated in Chapter V, Regulation 19
SOLAS – 74, as amended
Requirements, stated in Chapter V, Regulation 19
Panama Maritime Authority
Requirements, stated in Merchant Marine Circular # 138 :
Subject
Panama Maritime Authority
Requirements, stated in Merchant Marine Circular # 138 :
Subject
REPUBLIC OF THE MARSHALL ISLANDS
Marine Notice No. 2-011-32 :
SUBJECT:
REPUBLIC OF THE MARSHALL ISLANDS
Marine Notice No. 2-011-32 :
SUBJECT:

© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Magnetic compasses
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Magnetic compasses
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Magnetic compasses
The compass
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Magnetic compasses
The compass
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Magnetic compasses
A ship
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Magnetic compasses
A ship
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Main Reasons of
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Main Reasons of
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Types of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Types of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Coefficients of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation by the
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation by the
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation by the
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation by the
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation by the
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation by the
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation’ tables for
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation’ tables for
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation’ tables for
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation’ tables for
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation’ tables Flinders
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Compensation’ tables Flinders
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Calculation of deviation
© STC AVANT 2015
PREPARED BY CAPT Y. BYCHKOVKSIY
COMPASSES
Calculation of deviation
 Опора передней стойки для автомобилей ВАЗ
Опора передней стойки для автомобилей ВАЗ Организация работ по диагностированию, техническому обслуживанию ремонту ходовой части ВАЗ 2109
Организация работ по диагностированию, техническому обслуживанию ремонту ходовой части ВАЗ 2109 Лестница Иакова- Аппарат для производства электрической дуги
Лестница Иакова- Аппарат для производства электрической дуги Электротехника и электроника
Электротехника и электроника Методы спектроскопии в исследовании биополимеров
Методы спектроскопии в исследовании биополимеров Наши первые исследования. 2 класс
Наши первые исследования. 2 класс Взаимодействие токов. Магнитное поле тока
Взаимодействие токов. Магнитное поле тока Техническое обслуживание и ремонт ходовой части автомобиля ЗИЛ-130
Техническое обслуживание и ремонт ходовой части автомобиля ЗИЛ-130 Тормозная система камаз-5511
Тормозная система камаз-5511 Коливальний рух у природі і техніці. Гармонічні коливання. Маятник математичний. Пружинний маятник
Коливальний рух у природі і техніці. Гармонічні коливання. Маятник математичний. Пружинний маятник Магнітні властивості речовин
Магнітні властивості речовин Цвет. Оптика
Цвет. Оптика LEK1
LEK1 Методика подготовки к муниципальному этапу олимпиады по физике.
Методика подготовки к муниципальному этапу олимпиады по физике. Бытовые светильники
Бытовые светильники Радиациялық сәулелену
Радиациялық сәулелену Инженерные конструкции
Инженерные конструкции Основы теории передачи теплоты. Основные понятия и определения, механизмы переноса тепла. Теплопроводность
Основы теории передачи теплоты. Основные понятия и определения, механизмы переноса тепла. Теплопроводность Презентация Своя игра Законы динамики, 10 класс
Презентация Своя игра Законы динамики, 10 класс Переменный ток. Итоговый тест
Переменный ток. Итоговый тест Статика. Равновесие тел
Статика. Равновесие тел выступление в ЮурГУ
выступление в ЮурГУ Водородная бомба
Водородная бомба Свободные и вынужденные колебания системы с одной степенью свободы
Свободные и вынужденные колебания системы с одной степенью свободы Элементтердің периодтық жүйесі және оның физикалық түсіндірілуі. Паули принципі. Хунд ережесі
Элементтердің периодтық жүйесі және оның физикалық түсіндірілуі. Паули принципі. Хунд ережесі Система зажигания
Система зажигания Газовые законы
Газовые законы