- Динамический анализ механизма. Понятие о механическом КПД. Уравнение движения механизма

Содержание
- 2. Уравнение движения механизма Уравнение движения механизма можно записать как уравнение изменения кинетической энергии: , (1) где:
- 3. Если все силы, моменты сил и массы привести к выбранной точке приведения, то ур-е 1 можно
- 4. Если силы и массы привести к звену приведения, то это звено будет иметь приведенный момент инерции
- 5. ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД РЕШЕНИЯ УРАВНЕНИЯ ДВИЖЕНИЯ МЕХАНИЗМА При работе машины из-за неравенства работ движущих сил и сил
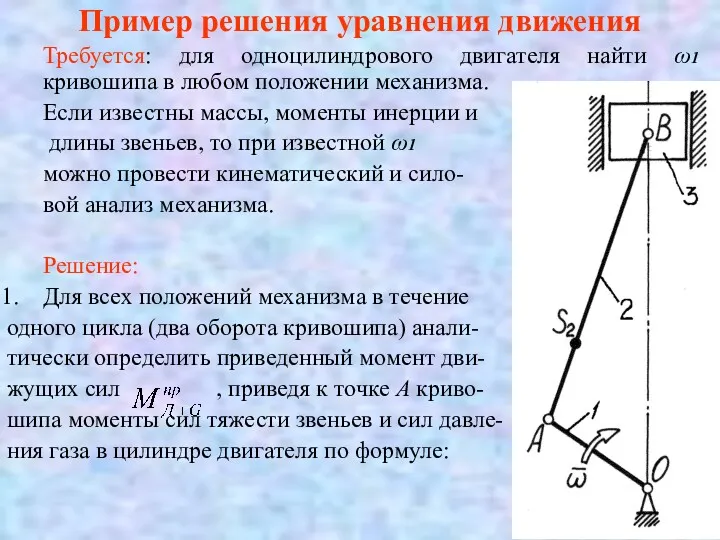
- 6. Пример решения уравнения движения Требуется: для одноцилиндрового двигателя найти ω1 кривошипа в любом положении механизма. Если
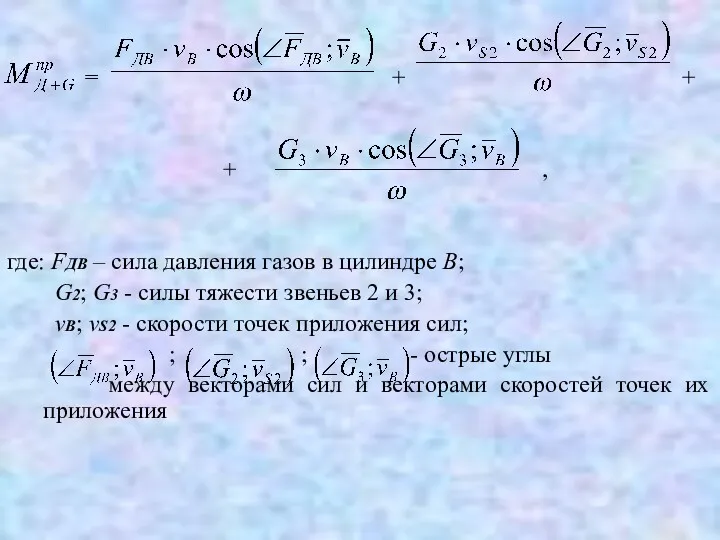
- 7. = + + + , где: FДВ – сила давления газов в цилиндре В; G2; G3
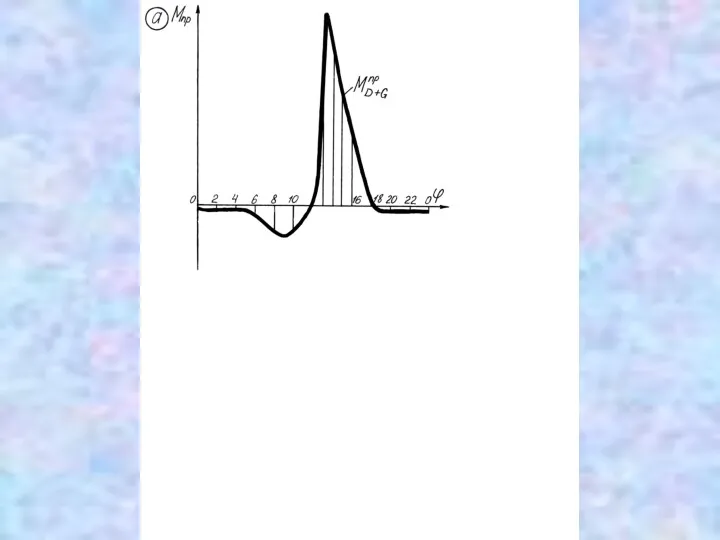
- 8. 2. По рассчитанным построить график = f(φ). График строят в масштабах μM = [Н ⋅ м/
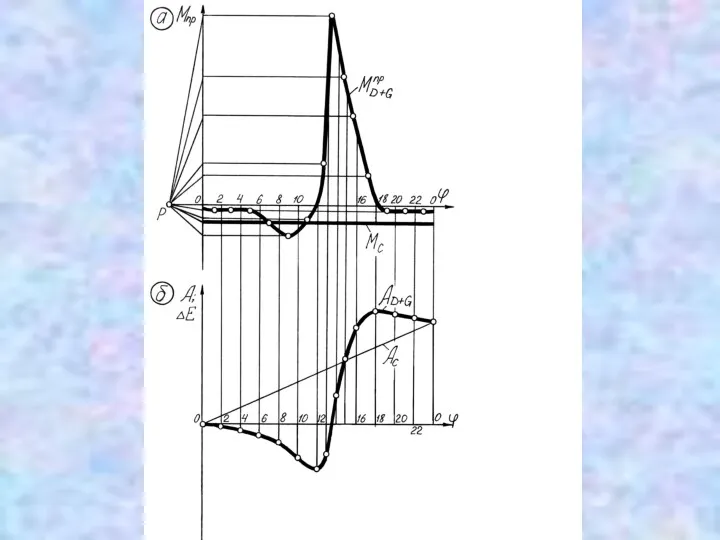
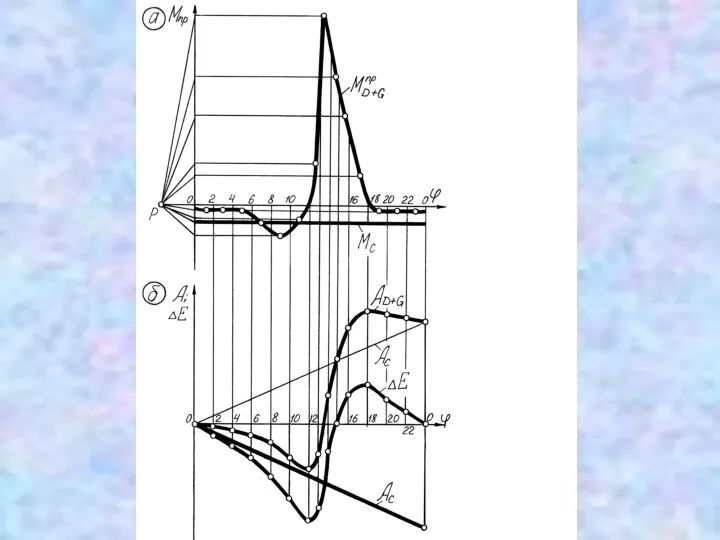
- 10. Исходя из этого надо соединить начальную и конечную точки графика АД+G = f(φ) прямой линией. Прямую
- 12. 7. Для разных положений механизма в течение одного цикла вычислить приведенный момент инерции Jпр механизма и
- 14. 10 Изменение кинетической энергии ∆Ek и приведенный момент инерции Jпрk в положении механизма k можно определить,
- 16. Скачать презентацию
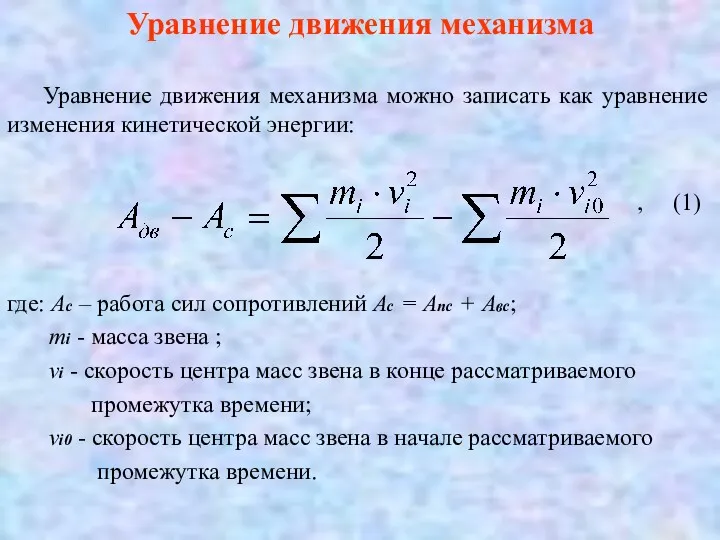
Уравнение движения механизма
Уравнение движения механизма можно записать как уравнение изменения
Уравнение движения механизма
Уравнение движения механизма можно записать как уравнение изменения
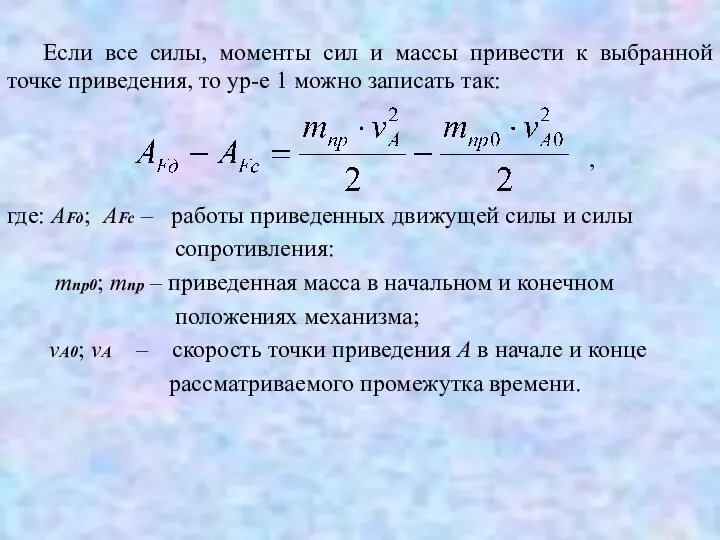
Если все силы, моменты сил и массы привести к выбранной точке
Если все силы, моменты сил и массы привести к выбранной точке
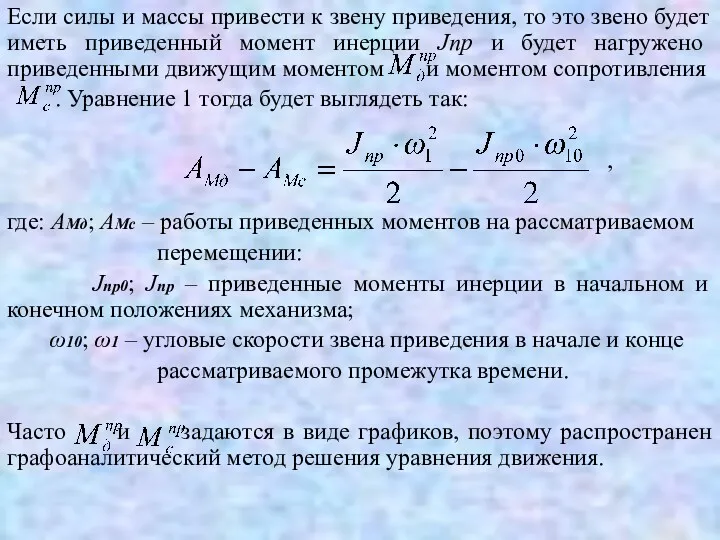
Если силы и массы привести к звену приведения, то это звено
Если силы и массы привести к звену приведения, то это звено
ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД РЕШЕНИЯ УРАВНЕНИЯ ДВИЖЕНИЯ МЕХАНИЗМА
При работе машины из-за неравенства работ
ГРАФОАНАЛИТИЧЕСКИЙ МЕТОД РЕШЕНИЯ УРАВНЕНИЯ ДВИЖЕНИЯ МЕХАНИЗМА
При работе машины из-за неравенства работ
Пример решения уравнения движения
Требуется: для одноцилиндрового двигателя найти ω1 кривошипа в
Пример решения уравнения движения
Требуется: для одноцилиндрового двигателя найти ω1 кривошипа в
= + +
+ ,
где: FДВ – сила давления газов в
+ ,
где: FДВ – сила давления газов в
2. По рассчитанным построить график = f(φ). График строят в масштабах
2. По рассчитанным построить график = f(φ). График строят в масштабах
Исходя из этого надо соединить начальную и конечную точки графика АД+G
Исходя из этого надо соединить начальную и конечную точки графика АД+G
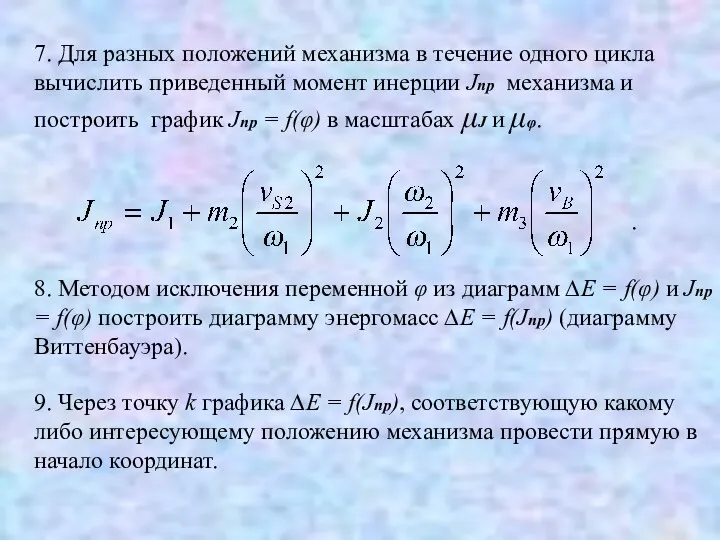
7. Для разных положений механизма в течение одного цикла вычислить приведенный
7. Для разных положений механизма в течение одного цикла вычислить приведенный
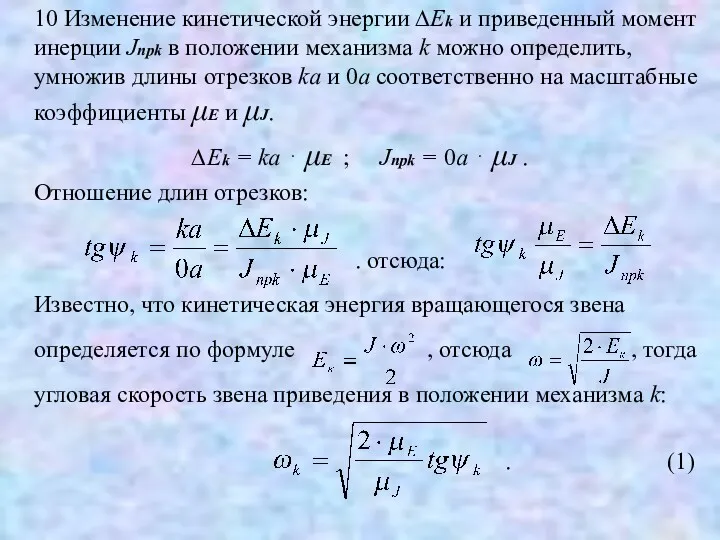
10 Изменение кинетической энергии ∆Ek и приведенный момент инерции Jпрk в
10 Изменение кинетической энергии ∆Ek и приведенный момент инерции Jпрk в
 Разгонные блоки космических аппаратов
Разгонные блоки космических аппаратов Делительные головки
Делительные головки Chemical energy storage
Chemical energy storage Атом. 9 класс
Атом. 9 класс Основы термодинамики. Решение задач
Основы термодинамики. Решение задач Подсистемы системы Корабль. Подсистема Маневрирование
Подсистемы системы Корабль. Подсистема Маневрирование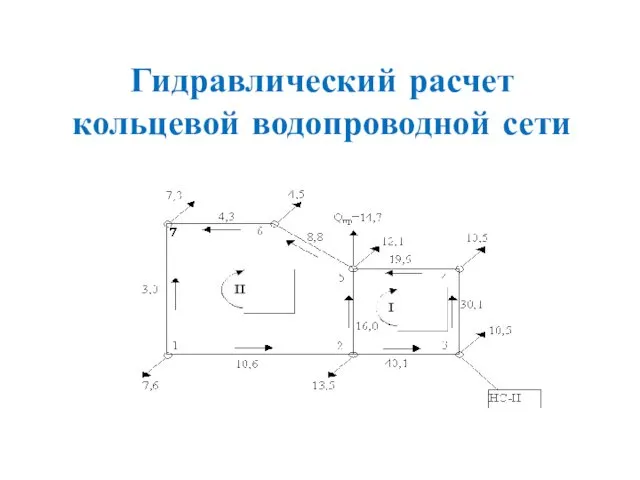 Гидравлический расчет кольцевой водопроводной сети
Гидравлический расчет кольцевой водопроводной сети Давление. Закон Архимеда. Контрольная работа
Давление. Закон Архимеда. Контрольная работа практическая работа по теме Линзы в 11 классе
практическая работа по теме Линзы в 11 классе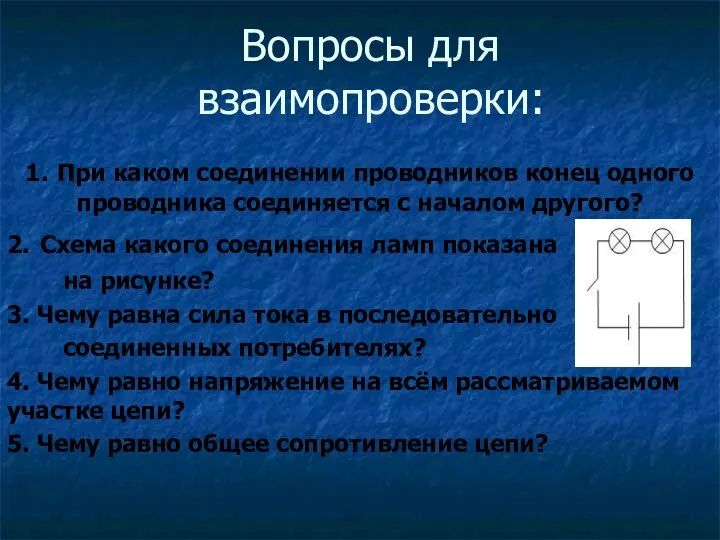 Урок: Параллельное соединение проводников
Урок: Параллельное соединение проводников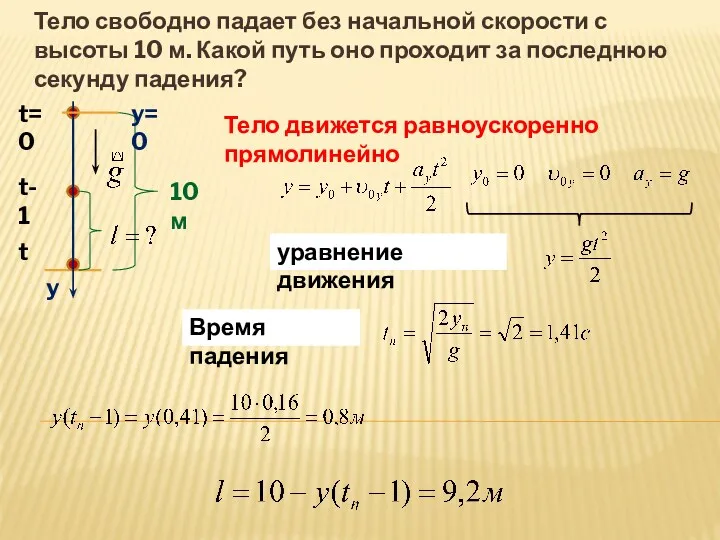 Свободное падение
Свободное падение 8. Плоскопараллельное движение твердого тела (плоское)
8. Плоскопараллельное движение твердого тела (плоское) Проект Экзофиз
Проект Экзофиз Микроскопия, виды и возможности современных микроскопов
Микроскопия, виды и возможности современных микроскопов Динамика вращательного движения
Динамика вращательного движения Элементы машиноведения. Составные части машин
Элементы машиноведения. Составные части машин Всероссийская олимпиада школьников по физике. Разбор заданий муниципального этапа. 11 класс
Всероссийская олимпиада школьников по физике. Разбор заданий муниципального этапа. 11 класс История возниктовения электрического освещения
История возниктовения электрического освещения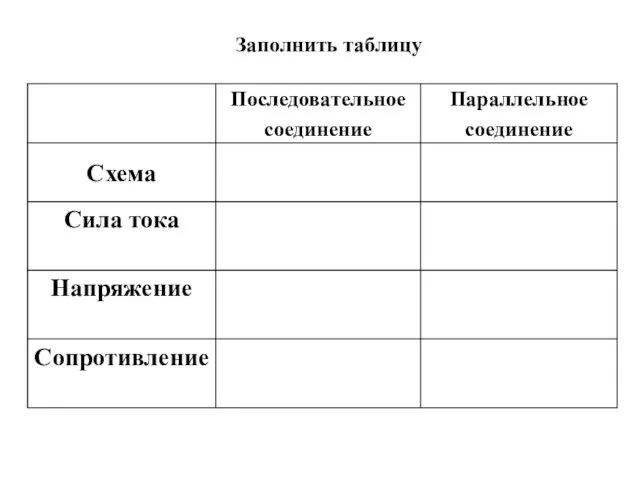 Последовательное соединение проводников
Последовательное соединение проводников Анализ и перспективы развития элегазового и вакуумного оборудования подстанций энергосистемы
Анализ и перспективы развития элегазового и вакуумного оборудования подстанций энергосистемы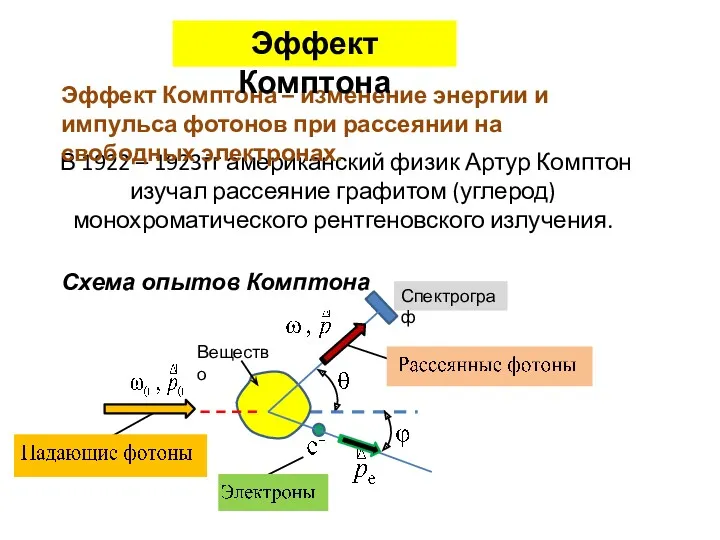 Эффект Комптона
Эффект Комптона Оливин. Физические и химические свойства
Оливин. Физические и химические свойства “Движение тел. Материальная точка”
“Движение тел. Материальная точка” Атомный фактор рассеяния. Рассеяние рентгеновских лучей на электронах в атомах
Атомный фактор рассеяния. Рассеяние рентгеновских лучей на электронах в атомах Леонардо Да Винчи и его технические изобретения
Леонардо Да Винчи и его технические изобретения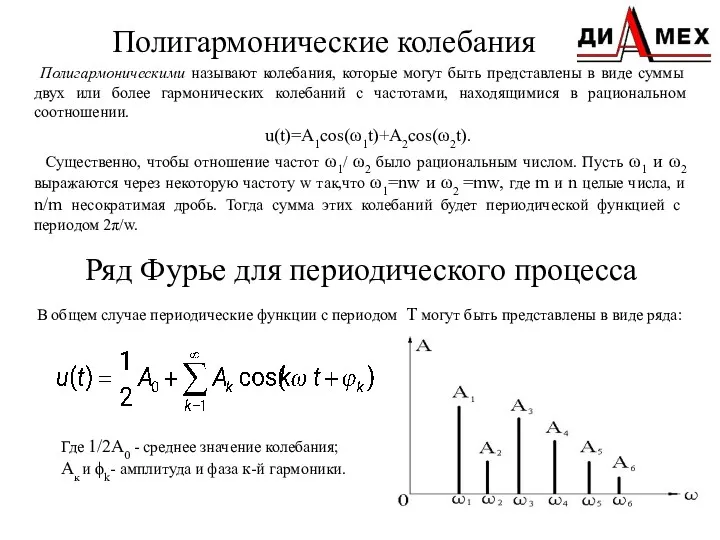 Полигармонические колебания
Полигармонические колебания Газ заңдары
Газ заңдары Закон Ома для полной цепи
Закон Ома для полной цепи