- Динамика кулисного механизма

Содержание
- 2. СХЕМА МЕХАНИЗМА 1-маховик 2-кулиса 3-каток
- 3. УСЛОВИЕ ЗАДАЧИ И ИСХОДНЫЕ ДАННЫЕ Кулисный механизм, состоящий из маховика 1, кулисы 2 и катка 3,
- 4. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА Механизм состоит из трех звеньев. Ведущим является маховик 1, к которому приложен вращающий
- 5. КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ Скорость т.А Скорость кулисы Ускорение кулисы Скорость центра катка Ускорение центра катка Угловая скорость
- 6. УРАВНЕНИЯ ГЕОМЕТРИЧЕСКИХ СВЯЗЕЙ xA = OA · cos φ; yA = OA · sin φ; xC2
- 7. ОПРЕДЕЛЕНИЕ УГЛОВОЙ СКОРОСТИ МАХОВИКА Для определения угловой скорости маховика применяем теорему об изменении кинетической энергии в
- 8. Кинетическую энергию механизма находим как сумму кинетических энергий его звеньев T = T1 + T2 +
- 9. где I3 = m3 ρ32 – момент инерции катка относительно оси, проходящей через его центр масс.
- 10. Определение элементарной работы, мощности внешних сил. Определение работы внешних сил на конечном перемещении (механизм в горизонтальной
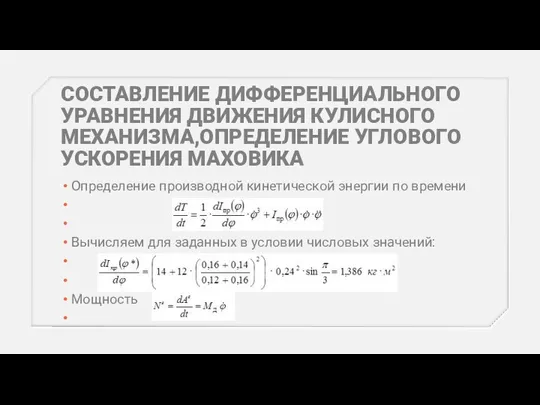
- 11. СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ДВИЖЕНИЯ КУЛИСНОГО МЕХАНИЗМА,ОПРЕДЕЛЕНИЕ УГЛОВОГО УСКОРЕНИЯ МАХОВИКА Определение производной кинетической энергии по времени Вычисляем
- 12. Воспользуемся теоремой об изменении кинетической энергией в дифференциальной форме где Ne – мощность внешних сил; Ni
- 13. Подставляем числовые данные и получаем дифференциальное уравнение второго порядка Это уравнение описывает движение кулисного механизма. Оно
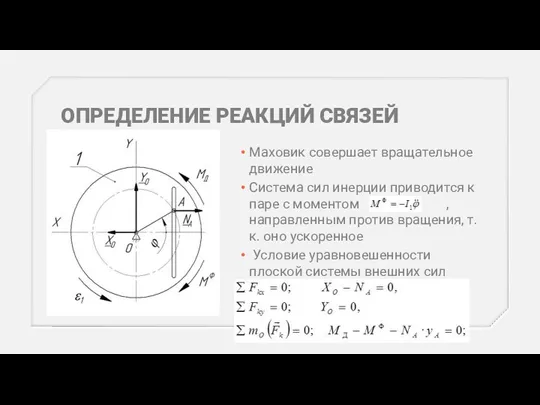
- 14. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ Маховик совершает вращательное движение Система сил инерции приводится к паре с моментом ,
- 15. Находим При угле φ* = π/6:
- 16. Действительные направления сил NA и XO соответствуют показанным на рисунке, т.к. их величина получилась положительной. Сила
- 18. Скачать презентацию

СХЕМА МЕХАНИЗМА
1-маховик 2-кулиса 3-каток
СХЕМА МЕХАНИЗМА
1-маховик 2-кулиса 3-каток
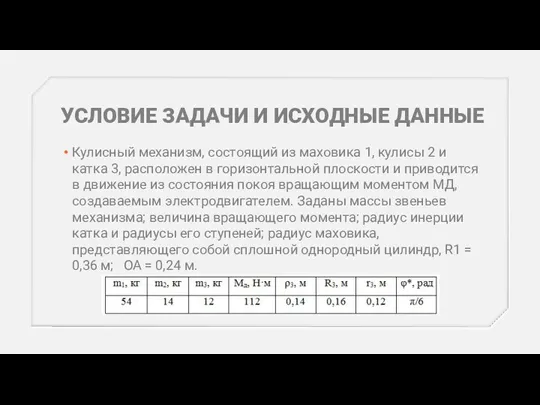
УСЛОВИЕ ЗАДАЧИ И ИСХОДНЫЕ ДАННЫЕ
Кулисный механизм, состоящий из маховика 1, кулисы
УСЛОВИЕ ЗАДАЧИ И ИСХОДНЫЕ ДАННЫЕ
Кулисный механизм, состоящий из маховика 1, кулисы
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Механизм состоит из трех звеньев. Ведущим является маховик
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Механизм состоит из трех звеньев. Ведущим является маховик
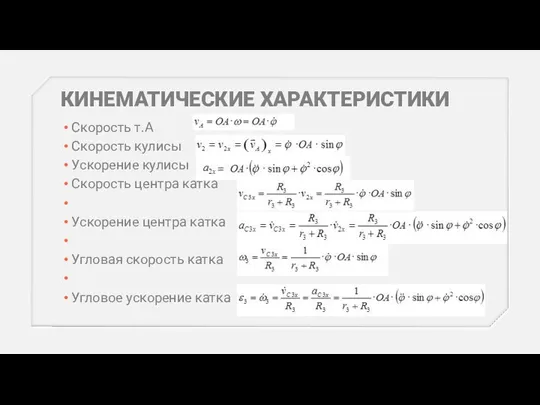
КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Скорость т.А
Скорость кулисы
Ускорение кулисы
Скорость центра катка
Ускорение центра катка
Угловая
КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Скорость т.А
Скорость кулисы
Ускорение кулисы
Скорость центра катка
Ускорение центра катка
Угловая
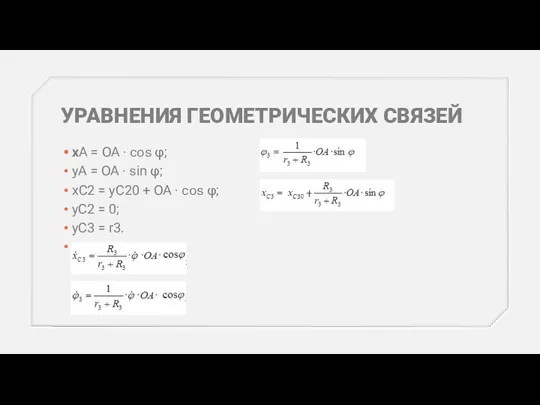
УРАВНЕНИЯ ГЕОМЕТРИЧЕСКИХ СВЯЗЕЙ
xA = OA · cos φ;
yA = OA
УРАВНЕНИЯ ГЕОМЕТРИЧЕСКИХ СВЯЗЕЙ
xA = OA · cos φ;
yA = OA
ОПРЕДЕЛЕНИЕ УГЛОВОЙ СКОРОСТИ МАХОВИКА
Для определения угловой скорости маховика применяем теорему
ОПРЕДЕЛЕНИЕ УГЛОВОЙ СКОРОСТИ МАХОВИКА
Для определения угловой скорости маховика применяем теорему

Кинетическую энергию механизма находим как сумму кинетических энергий его звеньев
T
Кинетическую энергию механизма находим как сумму кинетических энергий его звеньев
T

где I3 = m3 ρ32 – момент инерции катка относительно оси,
где I3 = m3 ρ32 – момент инерции катка относительно оси,

Определение элементарной работы, мощности внешних сил. Определение работы внешних сил на
Определение элементарной работы, мощности внешних сил. Определение работы внешних сил на
СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ДВИЖЕНИЯ КУЛИСНОГО МЕХАНИЗМА,ОПРЕДЕЛЕНИЕ УГЛОВОГО УСКОРЕНИЯ МАХОВИКА
Определение производной кинетической
СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ДВИЖЕНИЯ КУЛИСНОГО МЕХАНИЗМА,ОПРЕДЕЛЕНИЕ УГЛОВОГО УСКОРЕНИЯ МАХОВИКА
Определение производной кинетической

Воспользуемся теоремой об изменении кинетической энергией в дифференциальной форме
где Ne –
Воспользуемся теоремой об изменении кинетической энергией в дифференциальной форме
где Ne –
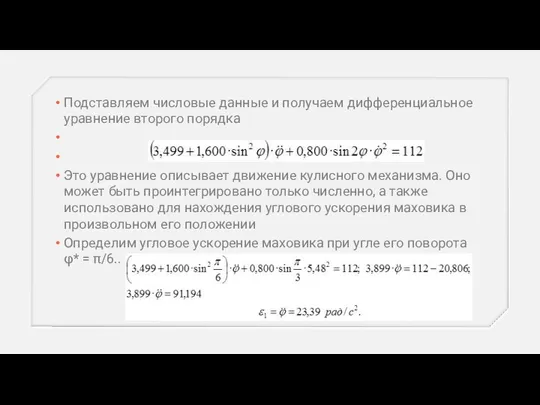
Подставляем числовые данные и получаем дифференциальное уравнение второго порядка
Это уравнение
Подставляем числовые данные и получаем дифференциальное уравнение второго порядка
Это уравнение
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ
Маховик совершает вращательное движение
Система сил инерции приводится к паре
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ СВЯЗЕЙ
Маховик совершает вращательное движение
Система сил инерции приводится к паре

Находим
При угле φ* = π/6:
Находим
При угле φ* = π/6:
Действительные направления сил NA и XO соответствуют показанным на рисунке, т.к.
Действительные направления сил NA и XO соответствуют показанным на рисунке, т.к.
 Constant Jerk Trajectory Generator
Constant Jerk Trajectory Generator Электрический ток в газах
Электрический ток в газах Презентация. Обучение детей с учётом психофизиологии.
Презентация. Обучение детей с учётом психофизиологии. магнитные явления
магнитные явления Жарық көздері. Жарық жылдамдығы
Жарық көздері. Жарық жылдамдығы Электрические аккумуляторы
Электрические аккумуляторы От энергии до...
От энергии до... Организация работ по ТО и ТР автомобилей Lada Granta с детальной разработкой участка покраски
Организация работ по ТО и ТР автомобилей Lada Granta с детальной разработкой участка покраски Организация технического обслуживания и ремонта автомобиля Урал-4320
Организация технического обслуживания и ремонта автомобиля Урал-4320 Закон Ома для участка цепи
Закон Ома для участка цепи Физикадағы демонстрациялы тәжрибе және оқытудағы процесстері
Физикадағы демонстрациялы тәжрибе және оқытудағы процесстері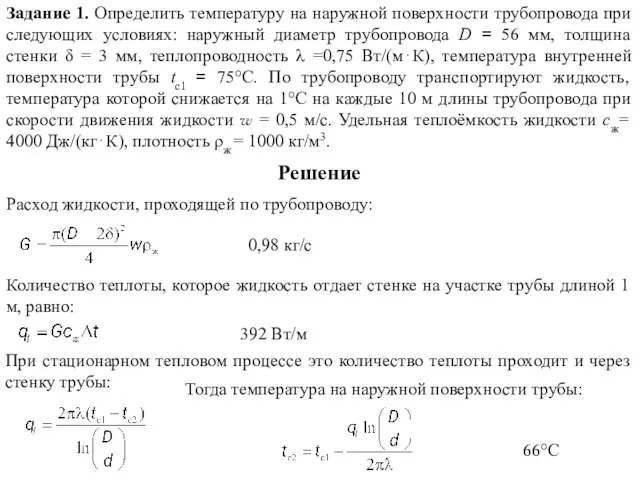 Нестационарная теплопроводность. Задачи
Нестационарная теплопроводность. Задачи энергосберегающие источники света
энергосберегающие источники света Физические основы электроники
Физические основы электроники Лампы накаливания. Электронагревательные приборы
Лампы накаливания. Электронагревательные приборы Ремонт выхлопной системы Ваз-2170. (Часть 1)
Ремонт выхлопной системы Ваз-2170. (Часть 1) Работа и мощность. Кинетическая и потенциальная энергия МТ и системы МТ. Лекция 6
Работа и мощность. Кинетическая и потенциальная энергия МТ и системы МТ. Лекция 6 Электромагнитные волны
Электромагнитные волны Урок 11.15. Трансформаторы
Урок 11.15. Трансформаторы Линзы. Построение изображений, даваемых линзой.
Линзы. Построение изображений, даваемых линзой. Автоматизация производственных процессов в машиностроении
Автоматизация производственных процессов в машиностроении Электронные курсы. Материаловедение. Техническая механика
Электронные курсы. Материаловедение. Техническая механика Равноускоренное движение. Ускорение
Равноускоренное движение. Ускорение Винтовые передачи. Достоинства и недостатки
Винтовые передачи. Достоинства и недостатки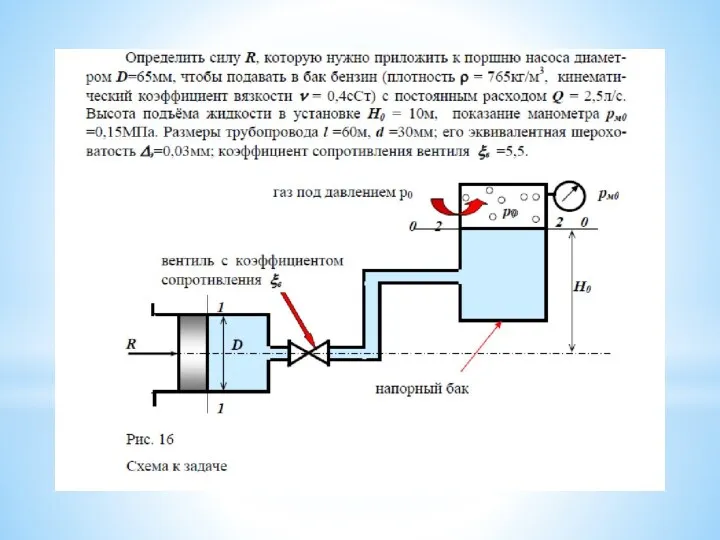 Сила R
Сила R Podstawowe pojęcia z zakresu RADIOMETRII
Podstawowe pojęcia z zakresu RADIOMETRII Щелочные аккумуляторы
Щелочные аккумуляторы Основы динамики
Основы динамики