- Динамика твердого тела. Уравнения движения твердого тела

Содержание
- 2. Динамика твердого тела Равновесие твердого тела Условия равновесия: M(e) = 0 относительно любого начала Равновесие балки
- 3. Динамика твердого тела Уравнение моментов относительно неподвижной оси O z – неподвижная ось (ось моментов) Уравнение
- 4. Динамика твердого тела Уравнение моментов относительно неподвижной оси Цилиндрическая система координат x y z – координаты
- 5. Динамика твердого тела Уравнение динамики вращательного движения O ω – ось моментов – момент инерции (характеризует
- 6. Динамика твердого тела Уравнение динамики вращательного движения Работа, совершаемая моментом силы Кинетическая энергия твердого тела при
- 7. Динамика твердого тела Теорема Гюйгенса–Штейнера O A a, ρ, ρ' – аксиальные вектора ось O ||
- 8. Динамика твердого тела Вычисление моментов инерции Общая формула 1) Кольцо 2) Диск (цилиндр) Диск = система
- 9. Динамика твердого тела Вычисление моментов инерции 3) Сфера Сфера = система колец
- 10. Динамика твердого тела Вычисление моментов инерции 4) Шар Шар = система сфер
- 11. Динамика твердого тела Вычисление моментов инерции Машина Атвуда ось вращения (ось моментов) a = ? Неизвестные
- 12. Динамика твердого тела Движение твердого тела, закрепленного в точке. Гироскопы Гироскоп Гироскопы – аксиально-симметричные тела (тела
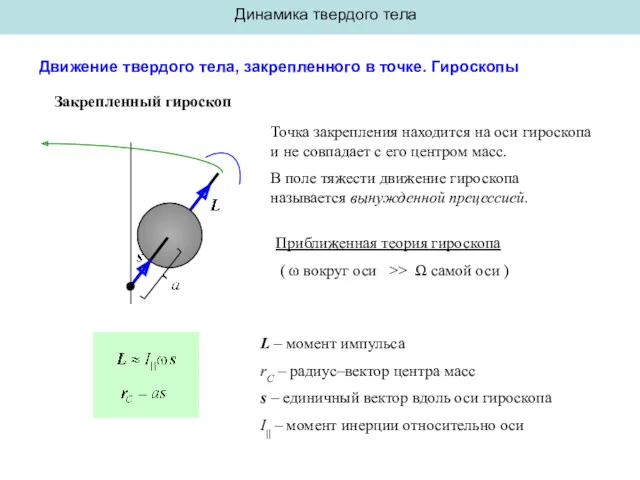
- 13. Динамика твердого тела Движение твердого тела, закрепленного в точке. Гироскопы Закрепленный гироскоп Точка закрепления находится на
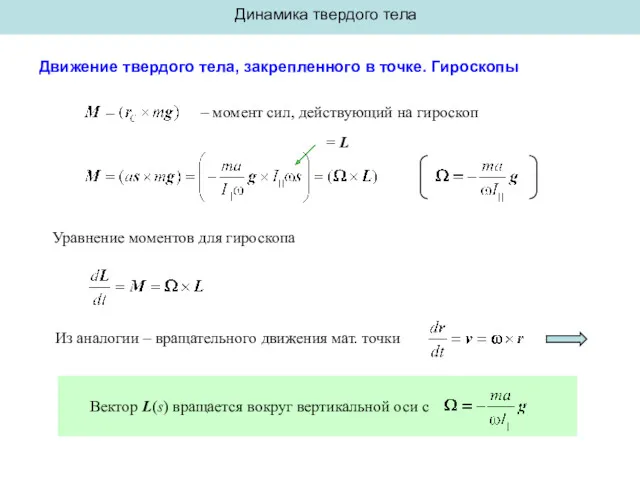
- 14. Динамика твердого тела Движение твердого тела, закрепленного в точке. Гироскопы = L Уравнение моментов для гироскопа
- 16. Скачать презентацию
Динамика твердого тела
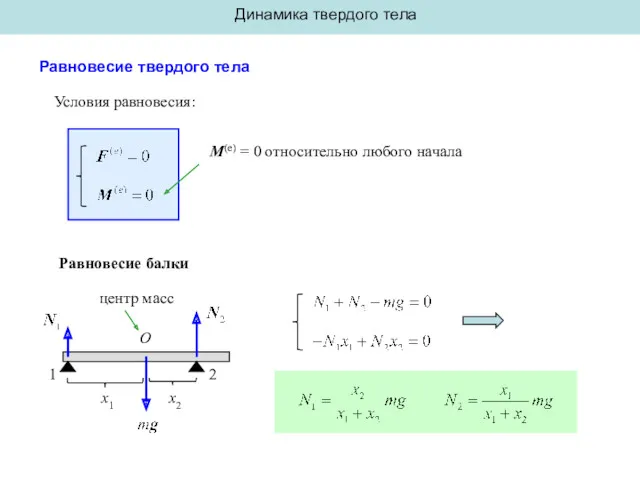
Равновесие твердого тела
Условия равновесия:
M(e) = 0 относительно любого начала
Равновесие
Динамика твердого тела
Равновесие твердого тела
Условия равновесия:
M(e) = 0 относительно любого начала
Равновесие
Динамика твердого тела
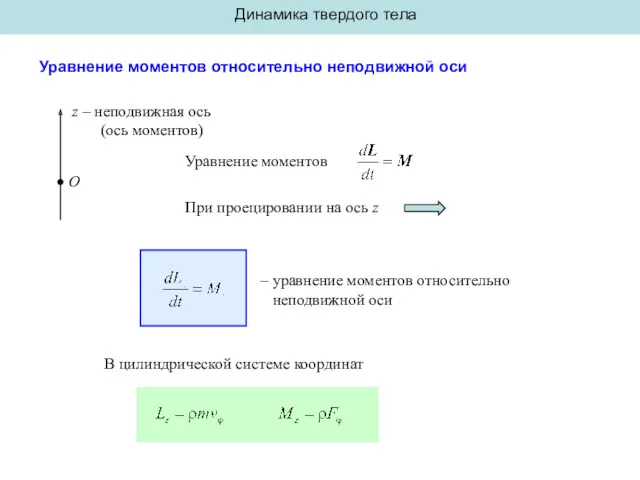
Уравнение моментов относительно неподвижной оси
O
z – неподвижная ось
(ось
Динамика твердого тела
Уравнение моментов относительно неподвижной оси
O
z – неподвижная ось (ось

Динамика твердого тела
Уравнение моментов относительно неподвижной оси
Цилиндрическая система координат
x
y
z
– координаты в
Динамика твердого тела
Уравнение моментов относительно неподвижной оси
Цилиндрическая система координат
x
y
z
– координаты в
Динамика твердого тела
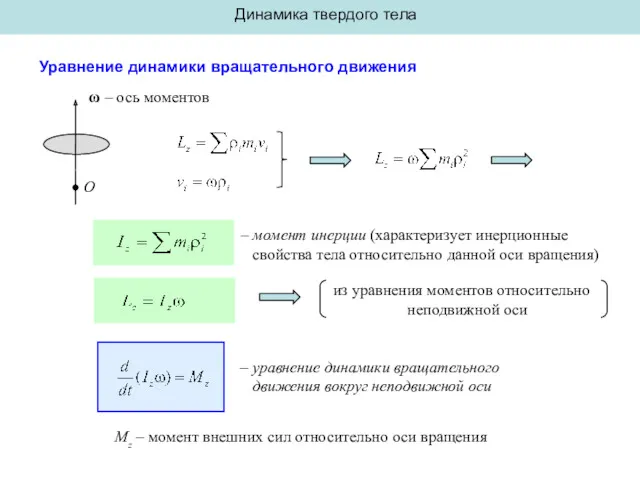
Уравнение динамики вращательного движения
O
ω – ось моментов
– момент инерции
Динамика твердого тела
Уравнение динамики вращательного движения
O
ω – ось моментов
– момент инерции
Динамика твердого тела
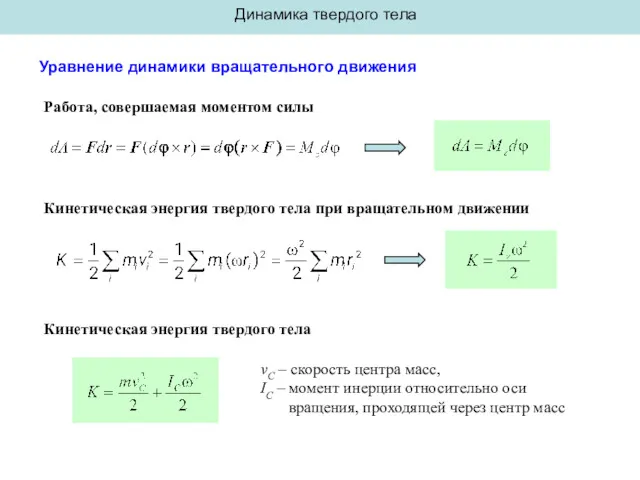
Уравнение динамики вращательного движения
Работа, совершаемая моментом силы
Кинетическая энергия твердого
Динамика твердого тела
Уравнение динамики вращательного движения
Работа, совершаемая моментом силы
Кинетическая энергия твердого
Динамика твердого тела
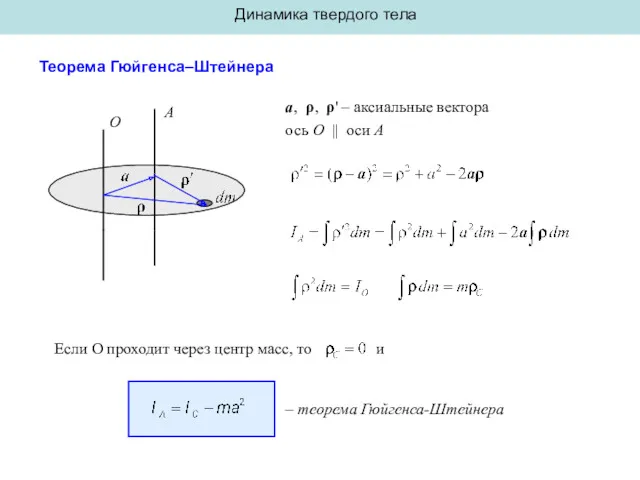
Теорема Гюйгенса–Штейнера
O
A
a, ρ, ρ' – аксиальные вектора
ось O ||
Динамика твердого тела
Теорема Гюйгенса–Штейнера
O
A
a, ρ, ρ' – аксиальные вектора ось O ||
Динамика твердого тела
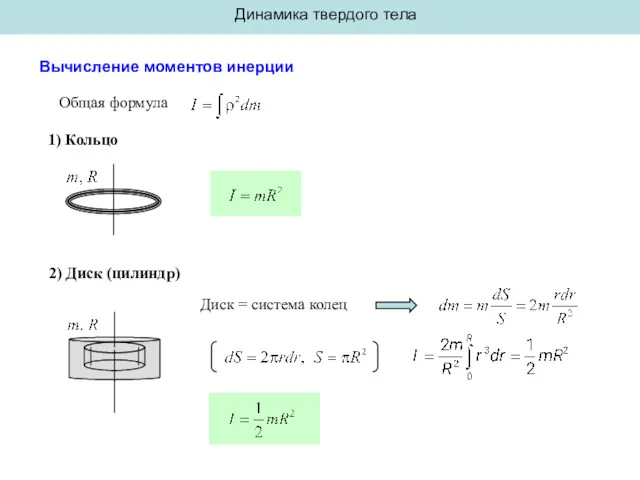
Вычисление моментов инерции
Общая формула
1) Кольцо
2) Диск (цилиндр)
Диск = система
Динамика твердого тела
Вычисление моментов инерции
Общая формула
1) Кольцо
2) Диск (цилиндр)
Диск = система

Динамика твердого тела
Вычисление моментов инерции
3) Сфера
Сфера = система колец
Динамика твердого тела
Вычисление моментов инерции
3) Сфера
Сфера = система колец
Динамика твердого тела
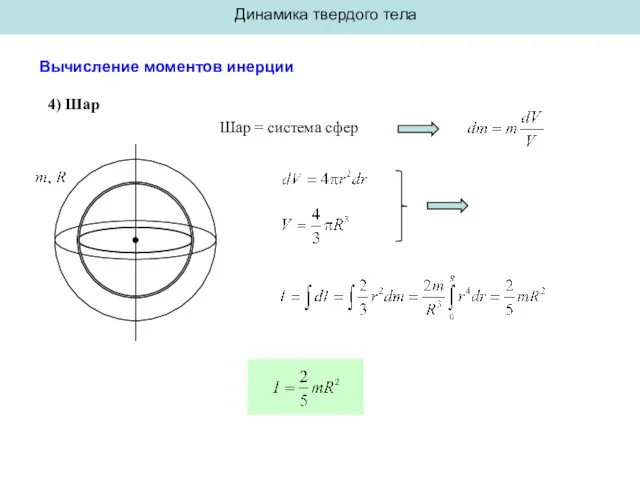
Вычисление моментов инерции
4) Шар
Шар = система сфер
Динамика твердого тела
Вычисление моментов инерции
4) Шар
Шар = система сфер

Динамика твердого тела
Вычисление моментов инерции
Машина Атвуда
ось вращения
(ось моментов)
a = ?
Неизвестные
a,
Динамика твердого тела
Вычисление моментов инерции
Машина Атвуда
ось вращения
(ось моментов)
a = ?
Неизвестные a,
Динамика твердого тела
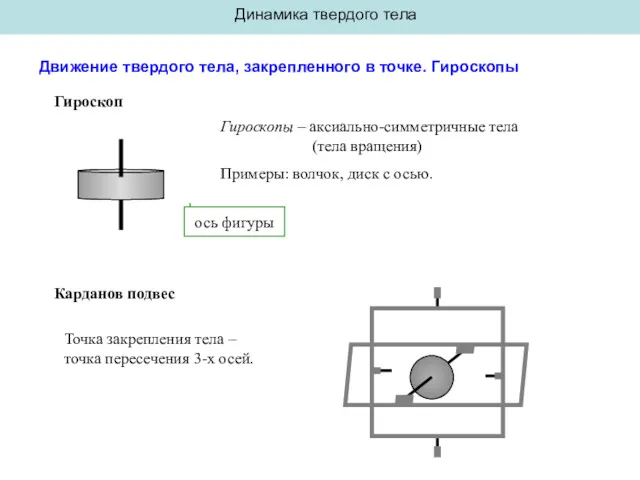
Движение твердого тела, закрепленного в точке. Гироскопы
Гироскоп
Гироскопы – аксиально-симметричные
Динамика твердого тела
Движение твердого тела, закрепленного в точке. Гироскопы
Гироскоп
Гироскопы – аксиально-симметричные
Динамика твердого тела
Движение твердого тела, закрепленного в точке. Гироскопы
Закрепленный гироскоп
Точка закрепления
Динамика твердого тела
Движение твердого тела, закрепленного в точке. Гироскопы
Закрепленный гироскоп
Точка закрепления
Динамика твердого тела
Движение твердого тела, закрепленного в точке. Гироскопы
= L
Уравнение моментов
Динамика твердого тела
Движение твердого тела, закрепленного в точке. Гироскопы
= L
Уравнение моментов
 Тесты по физике. Электрические заряды и электрический ток
Тесты по физике. Электрические заряды и электрический ток Модели атомов. Опыт Резерфорда
Модели атомов. Опыт Резерфорда Требования к машинам и деталям
Требования к машинам и деталям Механическое движение. Плотность тела. Повторительно-обобщающий урок
Механическое движение. Плотность тела. Повторительно-обобщающий урок Сложное сопротивление
Сложное сопротивление Гальваническое покрытие
Гальваническое покрытие 7 класс. Презентация по физике на тему Простые механизмы. Условие равновесия рычага
7 класс. Презентация по физике на тему Простые механизмы. Условие равновесия рычага Релятивистская механика. (Тема 6)
Релятивистская механика. (Тема 6) Модернизация и моделирование электропривода дверей лифта за счет применения линейного двигателя
Модернизация и моделирование электропривода дверей лифта за счет применения линейного двигателя Урок по теме: Сообщающие сосуды.
Урок по теме: Сообщающие сосуды. Конспект к уроку на тему РЕШЕНИЕ ЗАДАЧ НА РАСЧЕТ СОПРОТИВЛЕНИЯ ПРОВОДНИКА, СИЛЫ ТОКА, НАПРЯЖЕНИЯ.
Конспект к уроку на тему РЕШЕНИЕ ЗАДАЧ НА РАСЧЕТ СОПРОТИВЛЕНИЯ ПРОВОДНИКА, СИЛЫ ТОКА, НАПРЯЖЕНИЯ. Электризация тел
Электризация тел Сила Ампера
Сила Ампера Механічна робота
Механічна робота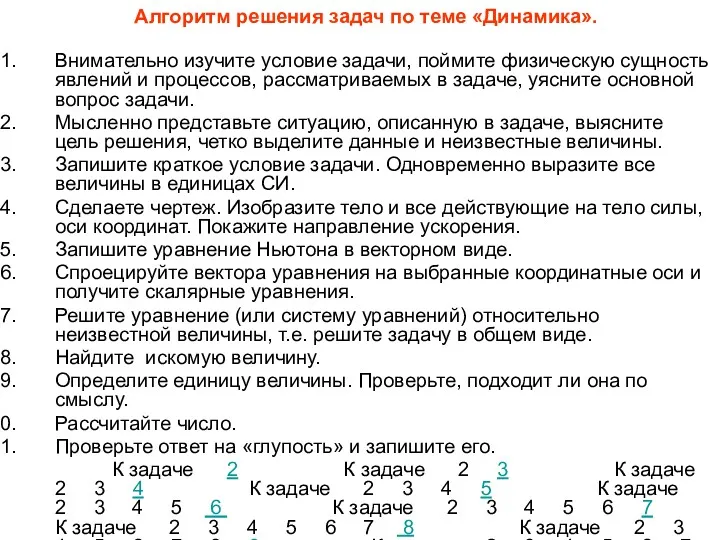 Алгоритм решения задач по теме Динамика
Алгоритм решения задач по теме Динамика Методы электрофизической и электрохимической обработки поверхностей заготовок
Методы электрофизической и электрохимической обработки поверхностей заготовок Электростатика Электрические взаимодействия (часть 1)
Электростатика Электрические взаимодействия (часть 1) Способы герметизации клепаных швов и изделий
Способы герметизации клепаных швов и изделий Холодильні машини
Холодильні машини Силы в механике. Для изучения темы в курсе 10 класса
Силы в механике. Для изучения темы в курсе 10 класса Аэрогазодинамика. Основы теории профиля и крыла (лекции 20, 21)
Аэрогазодинамика. Основы теории профиля и крыла (лекции 20, 21) Ионизирующее излучение
Ионизирующее излучение Конспект урока физики в 7 классе по теме Скорость. Единицы скорости
Конспект урока физики в 7 классе по теме Скорость. Единицы скорости Точечные дефекты и их влияние на свойства кристаллов. Равновесные и неравновесные дефекты. Примеси в полупроводниках
Точечные дефекты и их влияние на свойства кристаллов. Равновесные и неравновесные дефекты. Примеси в полупроводниках электрическое поле
электрическое поле 20230212_zvyozdnyy_chas
20230212_zvyozdnyy_chas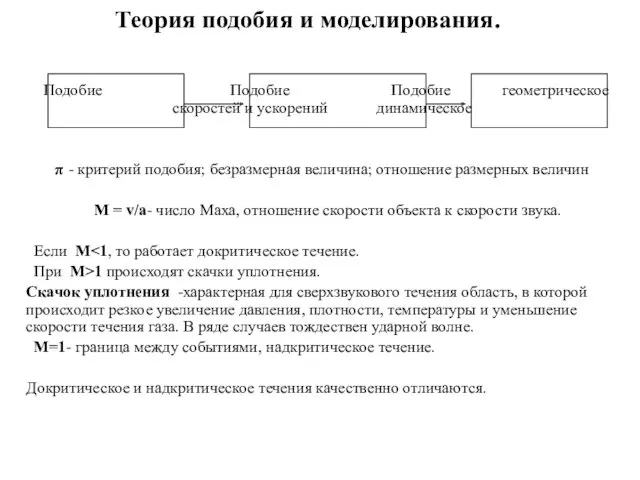 Теория подобия и моделирования
Теория подобия и моделирования Steering System
Steering System