- Эффективность грузовой системы уравновешивания вращающегося звена

Содержание
- 2. Эффективность грузовой системы уравновешивания вращающегося звена Понятие об уравновешивании Под уравновешиванием вращающихся звеньев понимается задача, связанная
- 6. Систем уравновешивания Известно два вида систем уравновешивания, применяемых в робототехнике: сигнальная и силовая. Сигнальная система уравновешивания
- 7. Активные системы Введение активных систем уравновешивания в состав робота позволяет существенно уменьшить мощность основных приводов (рис.
- 8. Пассивные системы уравновешивания Пассивными считают системы уравновешивания, приводы которых используют природные источники энергии: энергию гравитационного (рис.
- 9. Грузовое уравновешивание Грузовое уравновешивание статических нагрузок вращающегося звена исполнительного устройства робота основано на энергии гравитационного поля
- 12. Эффективность грузовой системы уравновешивания Эффективность грузовой системы уравновешивания оценивают коэффициентом эффективности Kт- коэфициент потерь за счет
- 13. Неуравновешенность
- 14. Грузовое уравновешивание статических нагрузок исполнительного устройства
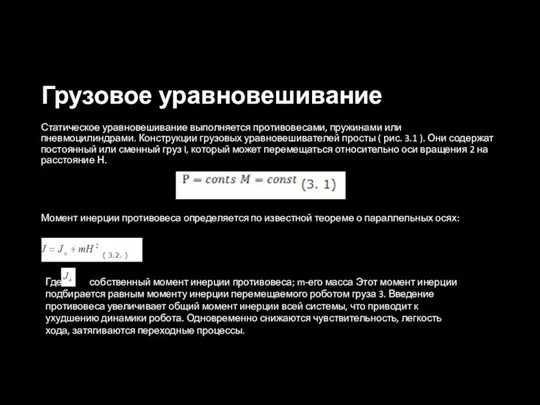
- 15. Грузовое уравновешивание Статическое уравновешивание выполняется противовесами, пружинами или пневмоцилиндрами. Конструкции грузовых уравновешивателей просты ( рис. 3.1
- 16. При движении звеньев с переменными скоростями (с ускорением) возникают силы инерции и их моменты, которые принято
- 17. Различают внешнюю и внутреннюю виброактивность. Под внутренней виброактивностью понимают колебания возникающие внутри механизма или машины, которые
- 18. Неуравновешенным будем называть такой механизм (или его звено), в котором при движении центр масс механизма (или
- 19. Пружинный механизм с постоянной нагрузочной характеристикой уравновешивания статических нагрузок Пружинный механизм с постоянной нагрузочной характеристикой представляет
- 20. Общие сведения Уравновешивающие устройства служат для восприятия веса звеньев манипулятора и частично - веса перемещаемых им
- 21. Пружинные механизмы уравновешивания Наиболее широко применяются пружинные механизмы уравновешивания. В них используются пружины, работающие на растяжения
- 23. Уравновешивание при помощи пружин применяется в случае, когда большие перемещения валка и точная его регулировка не
- 24. Пружины растяжения
- 25. Пружины растяжения весьма различны по конфигурации тела и зацепов. От этого зависит область их применения. Используются
- 26. 5) Производство сельхозтехники. Те же рессорные механизмы на комбайнах и прочей уборочной, обрабатывающей технике. 6) Производство
- 27. Пружина кручения Положение частей ударно-спускового механизма до заряжания при включенном предохранителе и спущенном курке: 1 —
- 28. Пружины кручения рассчитаны на воздействие определённого рода, а именно – на скручивание. На деталь влияют две
- 29. Пружина сжатия Магазин пистолета Макарова: 1 — корпус магазина; 2 — подаватель; 3 — пружина подавателя;
- 31. Скачать презентацию
Эффективность грузовой системы уравновешивания вращающегося звена
Понятие об уравновешивании
Под уравновешиванием вращающихся звеньев
Эффективность грузовой системы уравновешивания вращающегося звена
Понятие об уравновешивании
Под уравновешиванием вращающихся звеньев



Систем уравновешивания
Известно два вида систем уравновешивания, применяемых в робототехнике: сигнальная и
Систем уравновешивания
Известно два вида систем уравновешивания, применяемых в робототехнике: сигнальная и
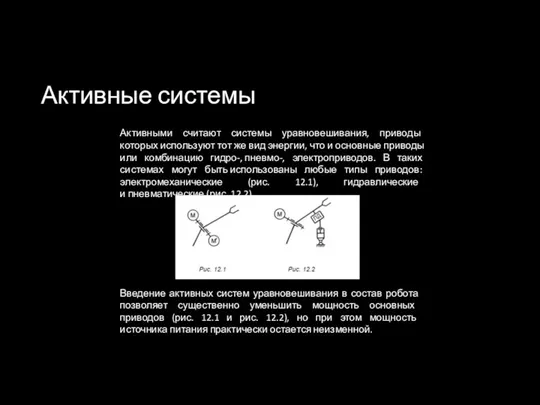
Активные системы
Введение активных систем уравновешивания в состав робота позволяет существенно уменьшить
Активные системы
Введение активных систем уравновешивания в состав робота позволяет существенно уменьшить
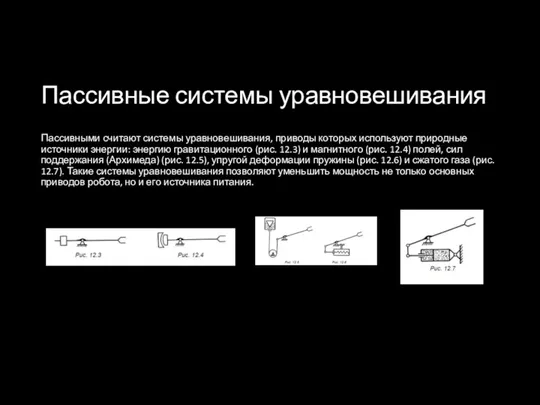
Пассивные системы уравновешивания
Пассивными считают системы уравновешивания, приводы которых используют природные источники
Пассивные системы уравновешивания
Пассивными считают системы уравновешивания, приводы которых используют природные источники
Грузовое уравновешивание
Грузовое уравновешивание статических нагрузок вращающегося звена исполнительного устройства робота основано
Грузовое уравновешивание
Грузовое уравновешивание статических нагрузок вращающегося звена исполнительного устройства робота основано


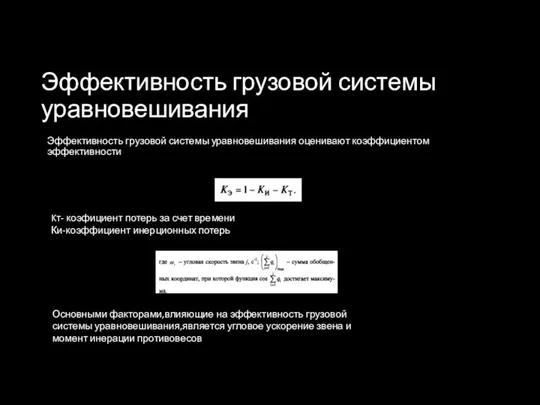
Эффективность грузовой системы уравновешивания
Эффективность грузовой системы уравновешивания оценивают коэффициентом эффективности
Kт- коэфициент
Эффективность грузовой системы уравновешивания
Эффективность грузовой системы уравновешивания оценивают коэффициентом эффективности
Kт- коэфициент
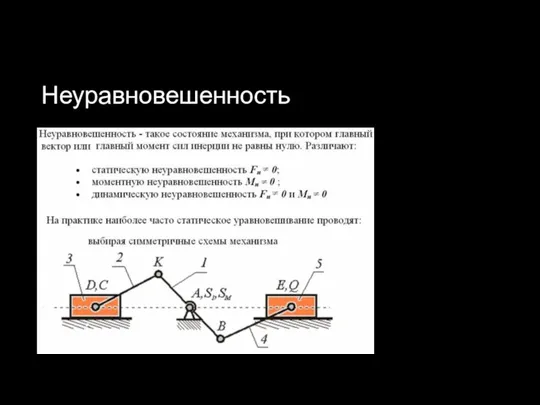
Неуравновешенность
Неуравновешенность
Грузовое уравновешивание статических нагрузок исполнительного устройства
Грузовое уравновешивание статических нагрузок исполнительного устройства
Грузовое уравновешивание
Статическое уравновешивание выполняется противовесами, пружинами или пневмоцилиндрами. Конструкции грузовых уравновешивателей
Грузовое уравновешивание
Статическое уравновешивание выполняется противовесами, пружинами или пневмоцилиндрами. Конструкции грузовых уравновешивателей
При движении звеньев с переменными скоростями (с ускорением) возникают силы инерции и их
Различают внешнюю и внутреннюю виброактивность. Под внутренней виброактивностью понимают колебания возникающие внутри механизма или машины, которые происходят
Различают внешнюю и внутреннюю виброактивность. Под внутренней виброактивностью понимают колебания возникающие внутри механизма или машины, которые происходят
Неуравновешенным будем называть такой механизм (или его звено), в котором при движении
Неуравновешенным будем называть такой механизм (или его звено), в котором при движении
Пружинный механизм с постоянной нагрузочной характеристикой уравновешивания статических нагрузок
Пружинный механизм с
Пружинный механизм с постоянной нагрузочной характеристикой уравновешивания статических нагрузок
Пружинный механизм с
Общие сведения
Уравновешивающие устройства служат для восприятия веса звеньев манипулятора и частично
Общие сведения
Уравновешивающие устройства служат для восприятия веса звеньев манипулятора и частично
Пружинные механизмы уравновешивания
Наиболее широко применяются пружинные механизмы уравновешивания. В них используются
Пружинные механизмы уравновешивания
Наиболее широко применяются пружинные механизмы уравновешивания. В них используются

Уравновешивание при помощи пружин применяется в случае, когда большие перемещения валка и точная его регулировка
Уравновешивание при помощи пружин применяется в случае, когда большие перемещения валка и точная его регулировка

Пружины растяжения
Пружины растяжения
Пружины растяжения весьма различны по конфигурации тела и зацепов. От этого
Пружины растяжения весьма различны по конфигурации тела и зацепов. От этого
5) Производство сельхозтехники. Те же рессорные механизмы на комбайнах и прочей
5) Производство сельхозтехники. Те же рессорные механизмы на комбайнах и прочей

Пружина кручения
Положение частей ударно-спускового механизма до заряжания при
включенном предохранителе и спущенном
Пружина кручения
Положение частей ударно-спускового механизма до заряжания при
включенном предохранителе и спущенном
Пружины кручения рассчитаны на воздействие определённого рода, а именно – на
Пружины кручения рассчитаны на воздействие определённого рода, а именно – на

Пружина сжатия
Магазин пистолета Макарова:
1 — корпус магазина; 2 — подаватель; 3
Пружина сжатия
Магазин пистолета Макарова:
1 — корпус магазина; 2 — подаватель; 3
 Синтез ких фильтров методом окон
Синтез ких фильтров методом окон Рабочие процессы бензинового двигателя
Рабочие процессы бензинового двигателя Проектирование зоны ТО-1 грузовых автомобилей с выделением шиномонтажного участка, технологический процесс ремонта колес
Проектирование зоны ТО-1 грузовых автомобилей с выделением шиномонтажного участка, технологический процесс ремонта колес Испарение и конденсация. Насыщенный пар и его свойства. Влажность воздуха
Испарение и конденсация. Насыщенный пар и его свойства. Влажность воздуха Ремонт систем и механизмов двигателя
Ремонт систем и механизмов двигателя Система параллельных сил. Лекция 3
Система параллельных сил. Лекция 3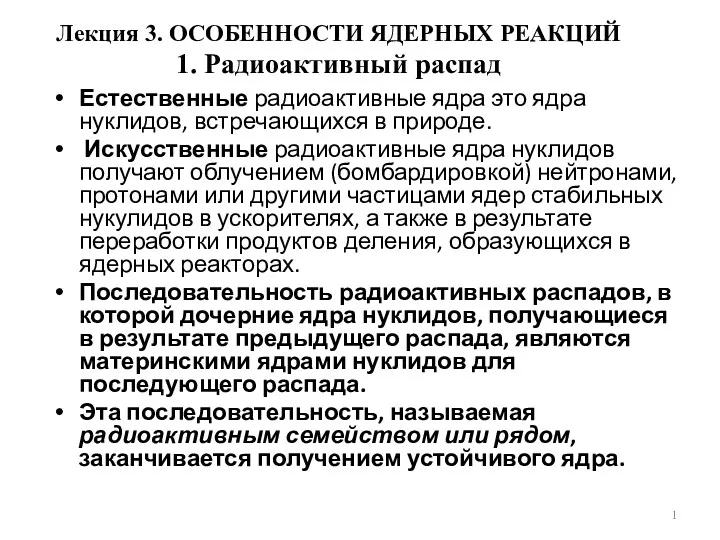 Особенности ядерных реакций
Особенности ядерных реакций Батарейка. Гальванический элемент.
Батарейка. Гальванический элемент. ИЗОТОПЫ
ИЗОТОПЫ Ток в газах
Ток в газах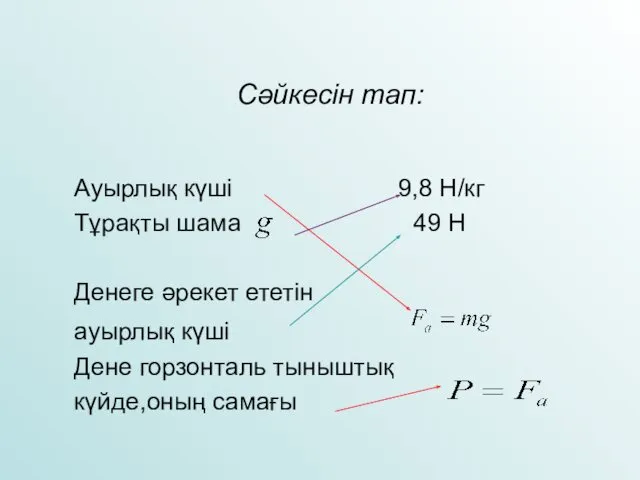 Ауырлық күші. Тұрақты шама
Ауырлық күші. Тұрақты шама Подготовка учащихся к практической части ОГЭ по физике
Подготовка учащихся к практической части ОГЭ по физике Нелинейные электрические цепи постоянного тока
Нелинейные электрические цепи постоянного тока Електромагнітні хвилі
Електромагнітні хвилі Жидкостная хроматография
Жидкостная хроматография Обкатка ПА, назначение, порядок проведения
Обкатка ПА, назначение, порядок проведения Механизм, автомат, робот
Механизм, автомат, робот Система питания двигателя от впрыска топлива
Система питания двигателя от впрыска топлива Распределение молекул в потенциальном поле сил
Распределение молекул в потенциальном поле сил Соединения деталей. Виды изделий. Резьбовые соединения
Соединения деталей. Виды изделий. Резьбовые соединения История люминесцентной лампы
История люминесцентной лампы Stress analysis versus modes of fracture in composites
Stress analysis versus modes of fracture in composites Викторина для 11 класса
Викторина для 11 класса 3D-Задание
3D-Задание Тесты. Механика
Тесты. Механика Элементы релятивистской механики. Лекция 9
Элементы релятивистской механики. Лекция 9 Гибридная система автомобиля
Гибридная система автомобиля Агрегатное состояние вещества. (8 класс)
Агрегатное состояние вещества. (8 класс)