- Глава 3. Работа и энергия. Тема §1. Энергия, работа, мощность

Содержание
- 2. Энергия — универсальная мера различных форм движения и взаимодействия материи. С различными формами движения материи связывают
- 3. Чтобы количественно характеризовать обмен энергией между взаимодействующими телами, в механике вводится понятие работы силы. Если тело
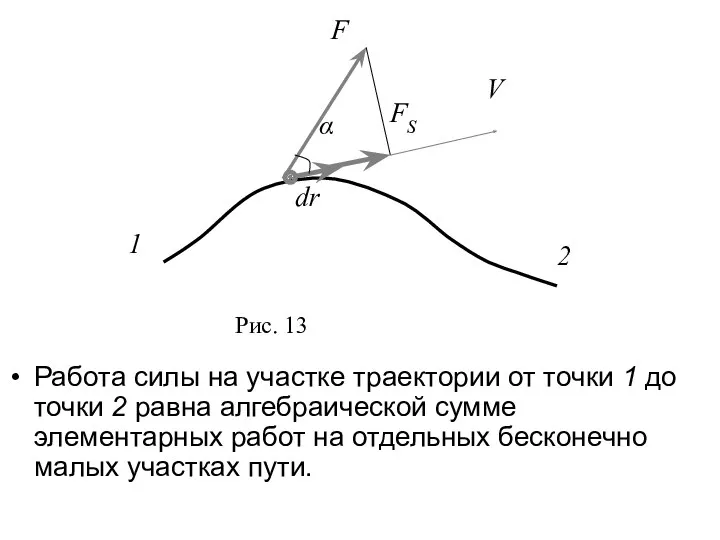
- 4. В общем случае сила может изменяться как по модулю, так и по направлению, поэтому формулой (11.1)
- 5. Работа силы на участке траектории от точки 1 до точки 2 равна алгебраической сумме элементарных работ
- 6. Эта сумма приводится к интегралу Для вычисления этого интеграла надо знать зависимость силы от пути S
- 7. Если, например, тело движется прямолинейно, сила F = const и α =const, то получим где S
- 8. Чтобы охарактеризовать скорость совершения работы, вводят понятие мощности: За время dt сила совершает работу , и
- 9. § 12. Кинетическая и потенциальная энергии Кинетическая энергия механической системы — это энергия механического движения этой
- 10. Используя второй закон Ньютона и умножая обе части равенства на перемещение , получим Так как ,
- 11. Таким образом, тело массой т, движущееся со скоростью, обладает кинетической энергией Из формулы (12.1) видно, что
- 12. Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между
- 13. Тело, находясь в потенциальном поле сил, обладает потенциальной энергией П. Работа консервативных сил при элементарном (бесконечно
- 14. Для консервативных сил или в векторном виде Вектор, определяемый выражением (12.5), называется градиентом скаляра П. (12.4)
- 15. Наряду с обозначением grad П применяется также обозначение с помощью символического вектора, называемого оператором Гамильтона (У.
- 16. Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда
- 17. — проекция силы упругости на ось х; k — коэффициент упругости (для пружины — жесткость), а
- 18. а полная работа идет на увеличение потенциальной энергии пружины. Таким образом, потенциальная энергия упругодеформированного тела Потенциальная
- 19. Полная механическая энергия системы — энергия механического движения и взаимодействия равна сумме кинетической и потенциальной энергий
- 20. § 13. Закон сохранения энергии Рассмотрим систему материальных точек массами , движущихся со скоростями . Пусть
- 21. При массы материальных точек постоянны и уравнения второго закона Ньютона для этих точек следующие: …………………………………… Двигаясь
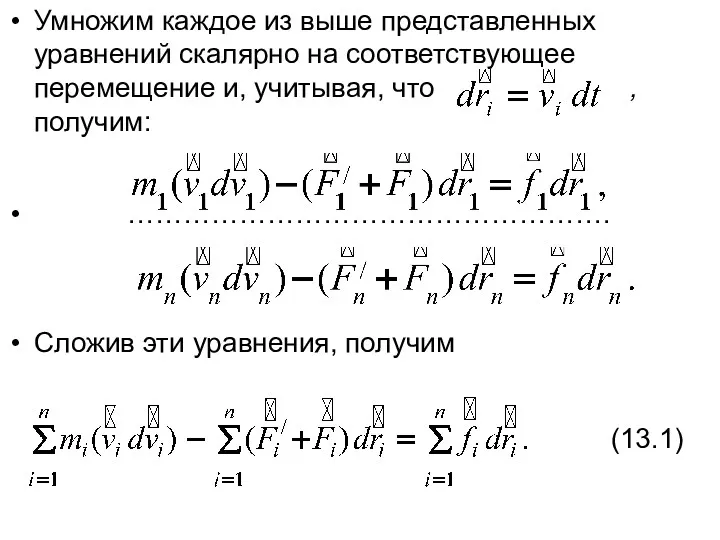
- 22. Умножим каждое из выше представленных уравнений скалярно на соответствующее перемещение и, учитывая, что , получим: …………………………………………….
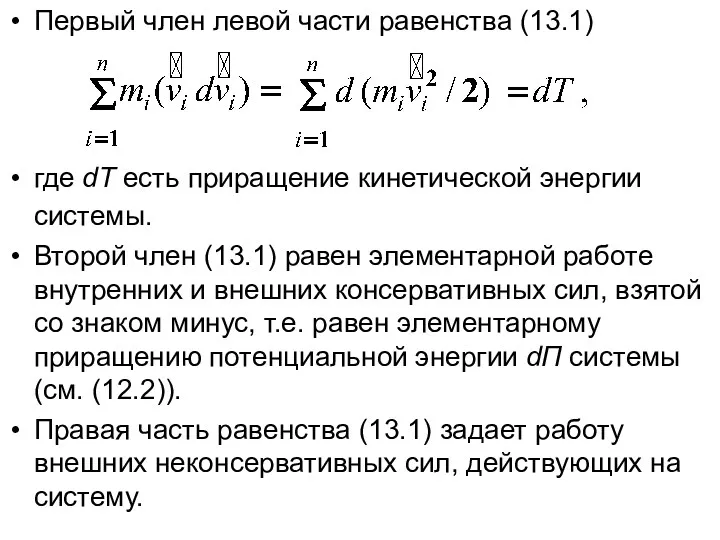
- 23. Первый член левой части равенства (13.1) где dT есть приращение кинетической энергии системы. Второй член (13.1)
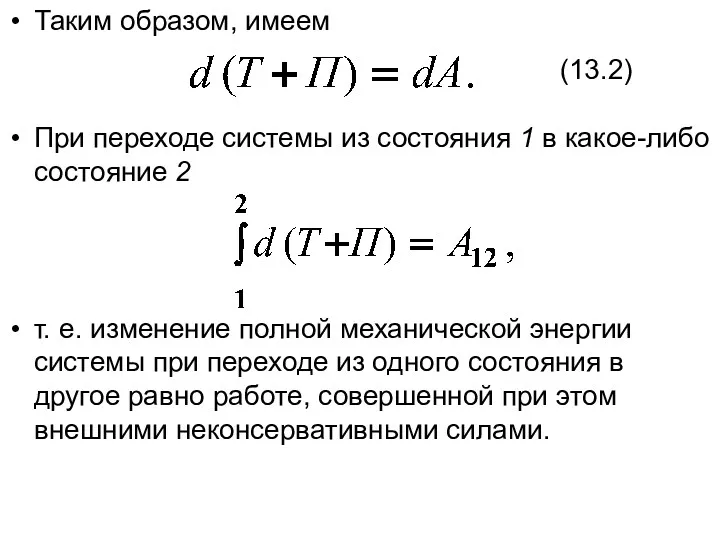
- 24. Таким образом, имеем При переходе системы из состояния 1 в какое-либо состояние 2 т. е. изменение
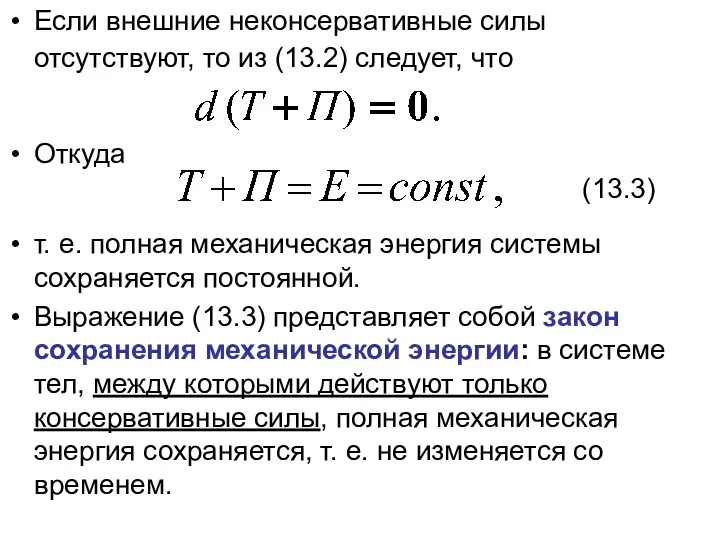
- 25. Если внешние неконсервативные силы отсутствуют, то из (13.2) следует, что Откуда т. е. полная механическая энергия
- 26. Механические системы, на тела которых действуют только консервативные силы (внутренние и внешние), называются консервативными системами. Закон
- 27. Существует еще один вид систем — диссипативные системы, в которых механическая энергия постепенно уменьшается за счет
- 28. Закон сохранения и превращения энергии — фундаментальный закон природы, он справедлив как для систем макроскопических тел,
- 29. § 14. Графическое представление энергии Во многих задачах рассматривается одномерное движение тела, потенциальная энергия которого является
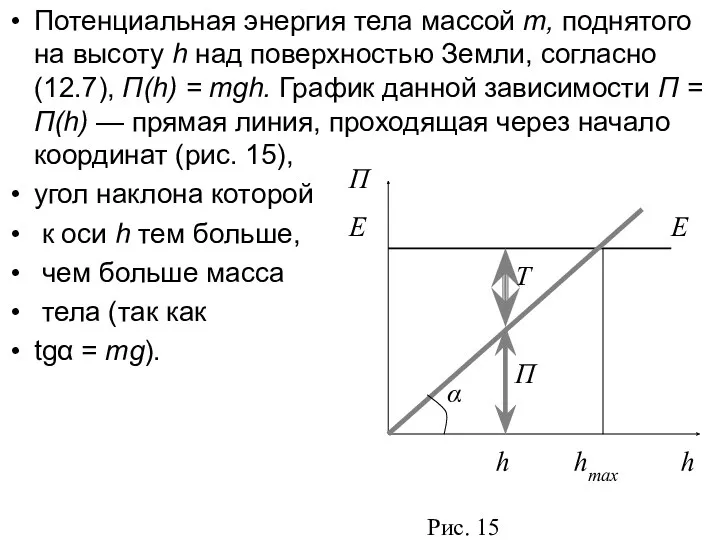
- 30. Потенциальная энергия тела массой т, поднятого на высоту h над поверхностью Земли, согласно (12.7), П(h) =
- 31. Из приведенного графика можно найти скорость тела на высоте h:
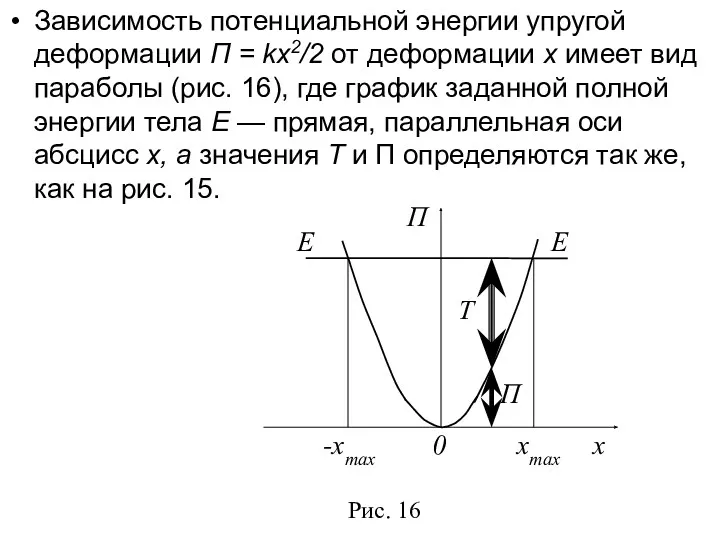
- 32. Зависимость потенциальной энергии упругой деформации П = kx2/2 от деформации х имеет вид параболы (рис. 16),
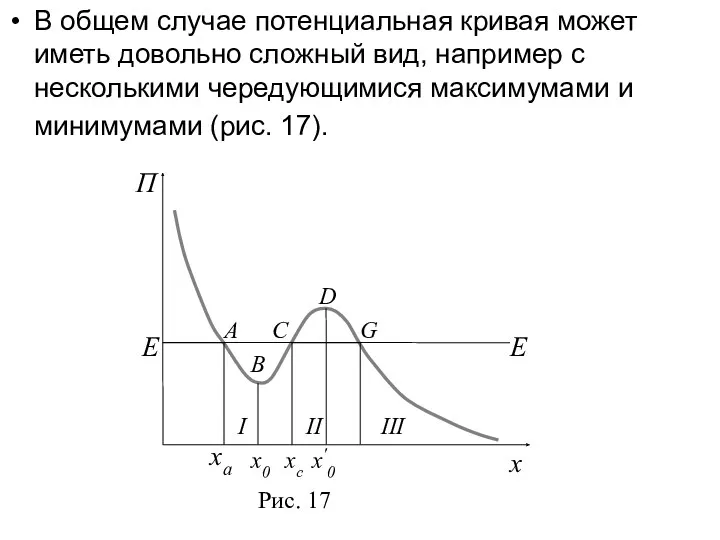
- 33. В общем случае потенциальная кривая может иметь довольно сложный вид, например с несколькими чередующимися максимумами и
- 34. § 15. Удар абсолютно упругих и неупругих тел Удар (или соударение) — это столкновение двух или
- 35. Тела во время удара претерпевают деформацию. Сущность удара заключается в том, что кинетическая энергия относительного движения
- 36. Если для сталкивающихся тел ε = 0, то такие тела называются абсолютно неупругими, если ε =
- 37. Прямая, проходящая через точку соприкосновения тел и нормальная к поверхности их соприкосновения, называется линией удара. Удар
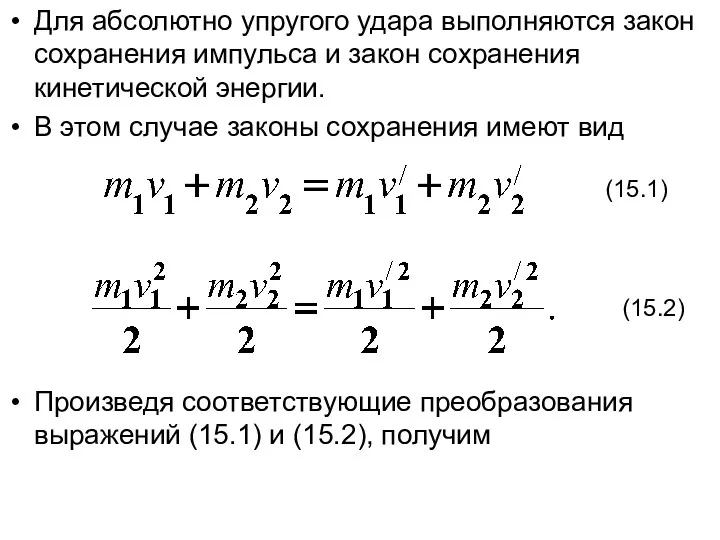
- 38. Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения кинетической энергии. Обозначим скорости шаров
- 39. Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения кинетической энергии. В этом случае
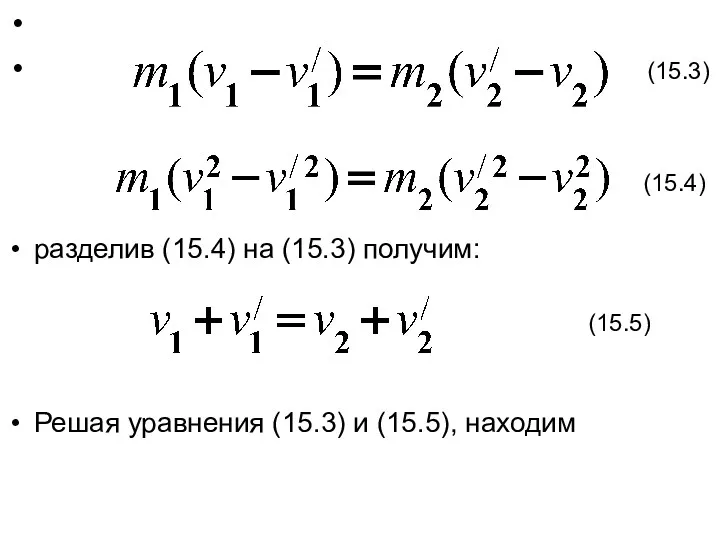
- 40. (15.3) разделив (15.4) на (15.3) получим: Решая уравнения (15.3) и (15.5), находим (15.4) (15.5)
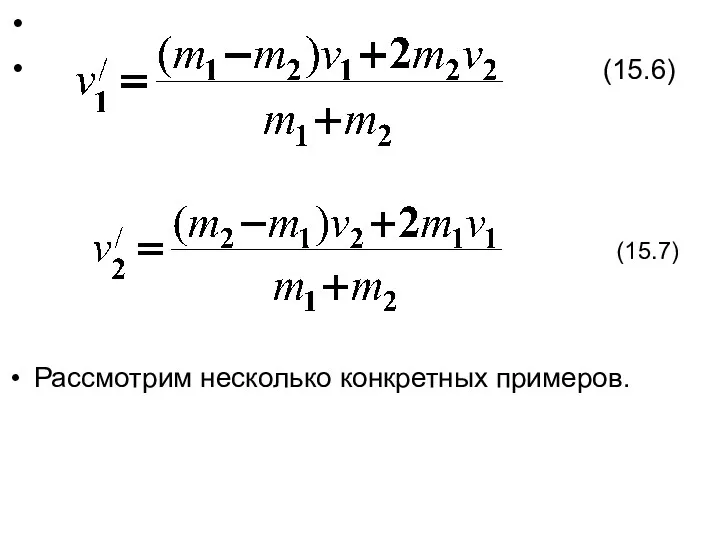
- 41. (15.6) Рассмотрим несколько конкретных примеров. (15.7)
- 42. 1) При Проанализируем выражения (15.8) и (15.9) для двух шаров различных масс: (15.8) (15.9)
- 43. a) Если второй шар до удара висел неподвижно ( ) (рис.19), то после удара остановится первый
- 44. б) . Первый шар продолжает двигаться в том же направлении, как и до удара, но с
- 45. в) . Направление движения первого шара при ударе изменяется — шар отскакивает обратно. Второй шар движется
- 46. г) (например, столкновение шара со стеной). Из уравнений (15.8) и (15.9) следует, что 2) При выражения
- 47. Абсолютно неупругий удар — столкновение двух тел, в результате которого тела объединяются, двигаясь дальше как единое
- 48. Используя закон сохранения импульса, можно записать Откуда Если шары движутся навстречу друг другу, то они вместе
- 49. Выясним, как изменяется кинетическая энергия шаров при центральном абсолютно неупругом ударе. Так как в процессе соударения
- 50. Используя (15.10), получим Если ударяемое тело было первоначально неподвижно , то
- 52. Скачать презентацию
Энергия — универсальная мера различных форм движения и взаимодействия материи.
С различными
Энергия — универсальная мера различных форм движения и взаимодействия материи.
С различными
Чтобы количественно характеризовать обмен энергией между взаимодействующими телами, в механике вводится
Чтобы количественно характеризовать обмен энергией между взаимодействующими телами, в механике вводится
В общем случае сила может изменяться как по модулю, так и
В общем случае сила может изменяться как по модулю, так и
Работа силы на участке траектории от точки 1 до точки 2
Работа силы на участке траектории от точки 1 до точки 2
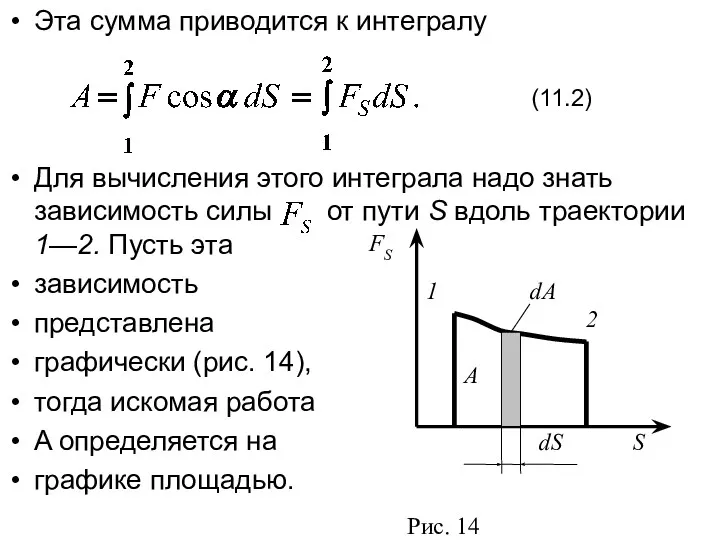
Эта сумма приводится к интегралу
Для вычисления этого интеграла надо знать зависимость
Эта сумма приводится к интегралу
Для вычисления этого интеграла надо знать зависимость
Если, например, тело движется прямолинейно, сила F = const и α
Если, например, тело движется прямолинейно, сила F = const и α
Чтобы охарактеризовать скорость совершения работы, вводят понятие мощности:
За время dt сила
Чтобы охарактеризовать скорость совершения работы, вводят понятие мощности:
За время dt сила
§ 12. Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — это
§ 12. Кинетическая и потенциальная энергии
Кинетическая энергия механической системы — это
Используя второй закон Ньютона
и умножая обе части равенства на перемещение
Используя второй закон Ньютона
и умножая обе части равенства на перемещение
Таким образом, тело массой т, движущееся со скоростью, обладает кинетической энергией
Из
Таким образом, тело массой т, движущееся со скоростью, обладает кинетической энергией
Из
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением
Потенциальная энергия — механическая энергия системы тел, определяемая их взаимным расположением
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией П.
Работа консервативных
Тело, находясь в потенциальном поле сил, обладает потенциальной энергией П.
Работа консервативных
Для консервативных сил
или в векторном виде
Вектор, определяемый выражением (12.5), называется градиентом
Для консервативных сил
или в векторном виде
Вектор, определяемый выражением (12.5), называется градиентом
Наряду с обозначением grad П применяется также обозначение с помощью символического
Наряду с обозначением grad П применяется также обозначение с помощью символического
Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь
Так как начало отсчета выбирается произвольно, то потенциальная энергия может иметь
— проекция силы упругости на ось х;
k — коэффициент
— проекция силы упругости на ось х;
k — коэффициент
а полная работа
идет на увеличение потенциальной энергии пружины.
Таким образом, потенциальная энергия
а полная работа
идет на увеличение потенциальной энергии пружины.
Таким образом, потенциальная энергия
Полная механическая энергия системы — энергия механического движения и взаимодействия равна
Полная механическая энергия системы — энергия механического движения и взаимодействия равна
§ 13. Закон сохранения энергии
Рассмотрим систему материальных точек
массами , движущихся
§ 13. Закон сохранения энергии
Рассмотрим систему материальных точек
массами , движущихся
При массы материальных точек постоянны и уравнения второго закона Ньютона для
При массы материальных точек постоянны и уравнения второго закона Ньютона для
Умножим каждое из выше представленных уравнений скалярно на соответствующее перемещение и,
Умножим каждое из выше представленных уравнений скалярно на соответствующее перемещение и,
Первый член левой части равенства (13.1)
где dT есть приращение кинетической энергии
Первый член левой части равенства (13.1)
где dT есть приращение кинетической энергии
Таким образом, имеем
При переходе системы из состояния 1 в какое-либо состояние
Таким образом, имеем
При переходе системы из состояния 1 в какое-либо состояние
Если внешние неконсервативные силы отсутствуют, то из (13.2) следует, что
Откуда
т.
Если внешние неконсервативные силы отсутствуют, то из (13.2) следует, что
Откуда
т.
Механические системы, на тела которых действуют только консервативные силы (внутренние и
Механические системы, на тела которых действуют только консервативные силы (внутренние и
Существует еще один вид систем — диссипативные системы, в которых механическая
Существует еще один вид систем — диссипативные системы, в которых механическая
Закон сохранения и превращения энергии — фундаментальный закон природы, он справедлив
Закон сохранения и превращения энергии — фундаментальный закон природы, он справедлив
§ 14. Графическое представление энергии
Во многих задачах рассматривается одномерное движение тела,
§ 14. Графическое представление энергии
Во многих задачах рассматривается одномерное движение тела,
Потенциальная энергия тела массой т, поднятого на высоту h над поверхностью
Потенциальная энергия тела массой т, поднятого на высоту h над поверхностью
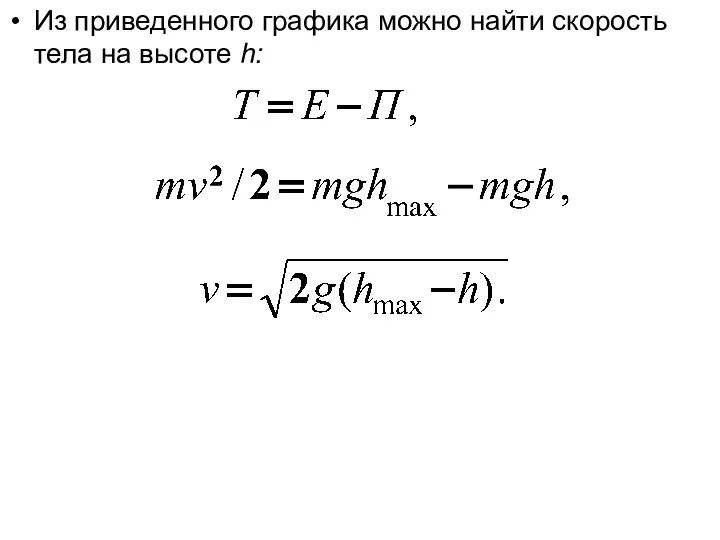
Из приведенного графика можно найти скорость тела на высоте h:
Из приведенного графика можно найти скорость тела на высоте h:
Зависимость потенциальной энергии упругой деформации П = kx2/2 от деформации х
Зависимость потенциальной энергии упругой деформации П = kx2/2 от деформации х
В общем случае потенциальная кривая может иметь довольно сложный вид, например
В общем случае потенциальная кривая может иметь довольно сложный вид, например
§ 15. Удар абсолютно упругих и неупругих тел
Удар (или соударение) —
§ 15. Удар абсолютно упругих и неупругих тел
Удар (или соударение) —
Тела во время удара претерпевают деформацию. Сущность удара заключается в том,
Тела во время удара претерпевают деформацию. Сущность удара заключается в том,
Если для сталкивающихся тел ε = 0, то такие тела называются
Если для сталкивающихся тел ε = 0, то такие тела называются
Прямая, проходящая через точку соприкосновения тел и нормальная к поверхности их
Прямая, проходящая через точку соприкосновения тел и нормальная к поверхности их
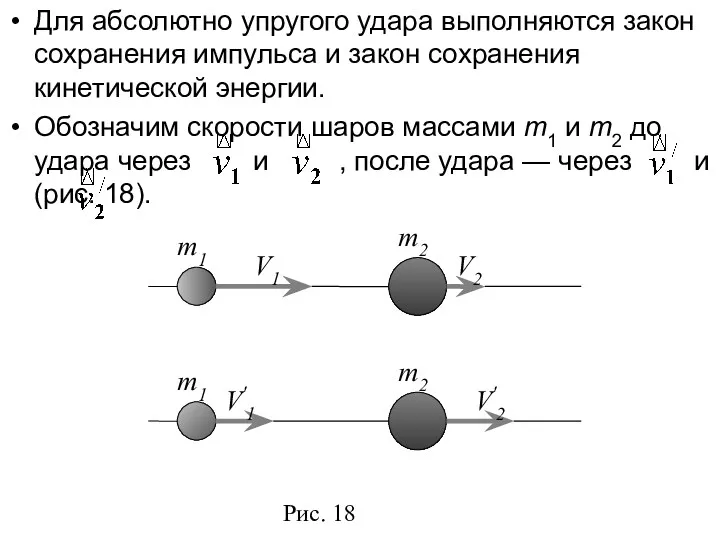
Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения
Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения
Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения
Для абсолютно упругого удара выполняются закон сохранения импульса и закон сохранения
(15.3)
разделив (15.4) на (15.3) получим:
Решая уравнения (15.3) и
(15.3)
разделив (15.4) на (15.3) получим:
Решая уравнения (15.3) и
(15.6)
Рассмотрим несколько конкретных примеров.
(15.7)
(15.6)
Рассмотрим несколько конкретных примеров.
(15.7)
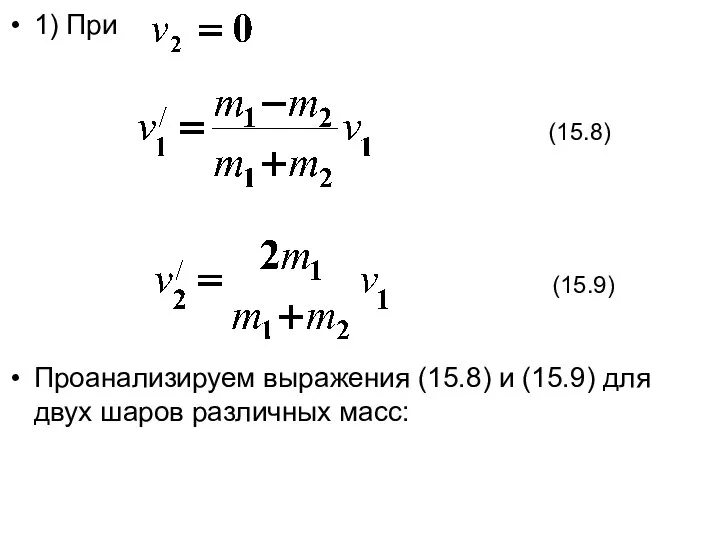
1) При
Проанализируем выражения (15.8) и (15.9) для двух шаров различных
1) При
Проанализируем выражения (15.8) и (15.9) для двух шаров различных
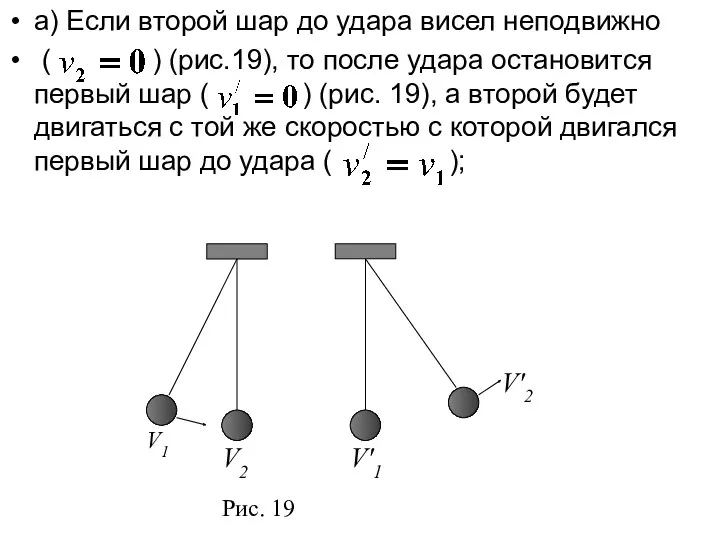
a) Если второй шар до удара висел неподвижно
( ) (рис.19),
a) Если второй шар до удара висел неподвижно
( ) (рис.19),
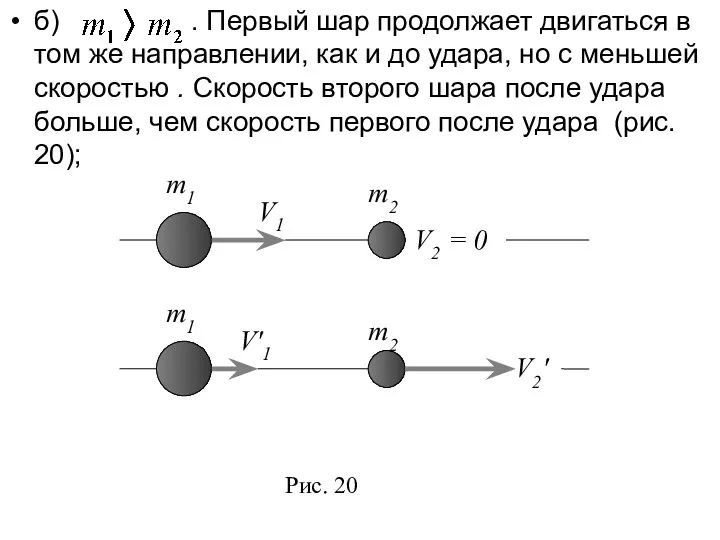
б) . Первый шар продолжает двигаться в том же направлении, как
б) . Первый шар продолжает двигаться в том же направлении, как
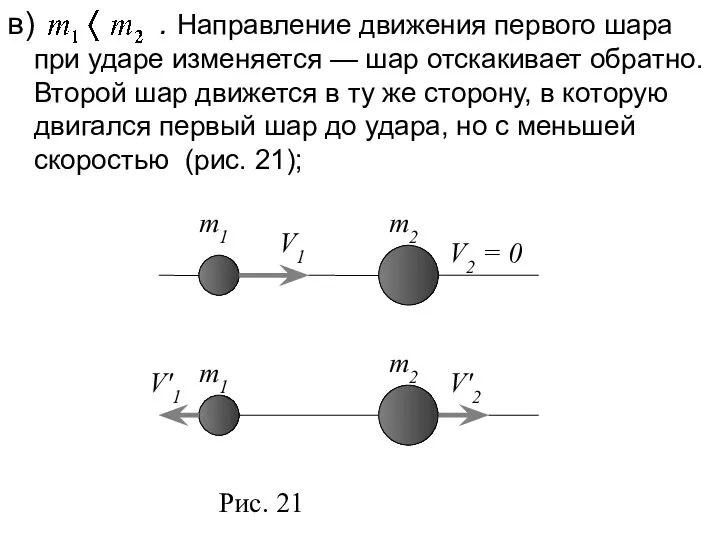
в) . Направление движения первого шара при ударе изменяется — шар
в) . Направление движения первого шара при ударе изменяется — шар
г) (например, столкновение шара со стеной). Из уравнений (15.8) и (15.9)
г) (например, столкновение шара со стеной). Из уравнений (15.8) и (15.9)
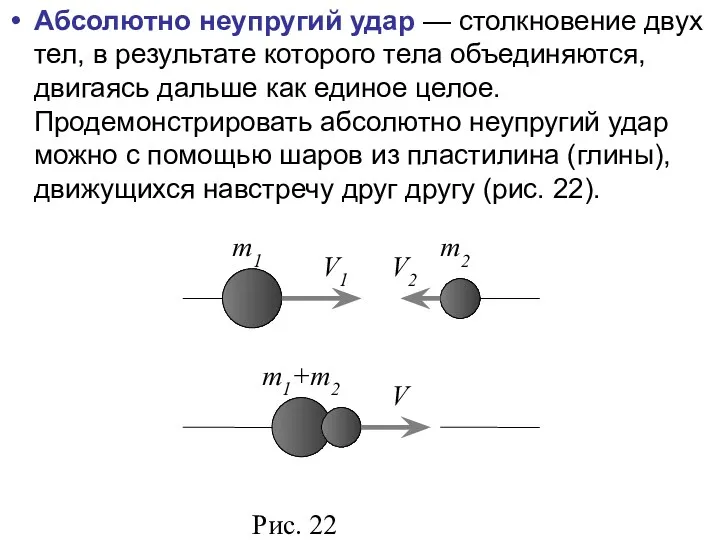
Абсолютно неупругий удар — столкновение двух тел, в результате которого тела
Абсолютно неупругий удар — столкновение двух тел, в результате которого тела
Используя закон сохранения импульса, можно записать
Откуда
Если шары движутся навстречу друг другу,
Используя закон сохранения импульса, можно записать
Откуда
Если шары движутся навстречу друг другу,
Выясним, как изменяется кинетическая энергия шаров при центральном абсолютно неупругом ударе.
Так
Выясним, как изменяется кинетическая энергия шаров при центральном абсолютно неупругом ударе.
Так
Используя (15.10), получим
Если ударяемое тело было первоначально неподвижно , то
Используя (15.10), получим
Если ударяемое тело было первоначально неподвижно , то
 Принцип суперпозиции полей.Урок одной задачи
Принцип суперпозиции полей.Урок одной задачи Презентация по теме: Механические колебания
Презентация по теме: Механические колебания Работа и потенциальная энергия электростатического поля
Работа и потенциальная энергия электростатического поля Волновые процессы
Волновые процессы Система питания двигателя от впрыска топлива
Система питания двигателя от впрыска топлива Организация ТО и ремонта автомобиля ВАЗ 2107
Организация ТО и ремонта автомобиля ВАЗ 2107 Газовые законы. 10 класс
Газовые законы. 10 класс In vivo folding. In vitro folding: spontaneously
In vivo folding. In vitro folding: spontaneously Интеллектуальная игра Умники и умницы по физике
Интеллектуальная игра Умники и умницы по физике Класифікація лісогосподарських машин. Лекція №2
Класифікація лісогосподарських машин. Лекція №2 Властивості поверхні рідини. Поверхневий натяг рідини
Властивості поверхні рідини. Поверхневий натяг рідини к уроку физики Основные единицы измерения системы СИ
к уроку физики Основные единицы измерения системы СИ Микроскоп кұрылысы
Микроскоп кұрылысы Електрична напруга. Вольтметр. Вимірювання напруги
Електрична напруга. Вольтметр. Вимірювання напруги Одноступеневий конічний прямозубий редуктор
Одноступеневий конічний прямозубий редуктор Резьба. Резьбовые соединения
Резьба. Резьбовые соединения Обобщающий урок по физике в 7 классе по теме: Давление
Обобщающий урок по физике в 7 классе по теме: Давление Huawei Device PT Test Instructions
Huawei Device PT Test Instructions Физика - наука о природе
Физика - наука о природе Технология проведения технического обслуживания и ремонта смазочной системы
Технология проведения технического обслуживания и ремонта смазочной системы Сила упругости
Сила упругости Презентация к уроку физики в 8 классе по теме Электризация
Презентация к уроку физики в 8 классе по теме Электризация Маневренность (Управляемость корабля)
Маневренность (Управляемость корабля) Самостоятельная работа учащихся на уроках физики
Самостоятельная работа учащихся на уроках физики Световые явления
Световые явления Лазеры. Определение лазера
Лазеры. Определение лазера Гравитационные силы
Гравитационные силы Нанотехнологии
Нанотехнологии