- Интегрированные системы ходового мостика (ИСМ)

Содержание
- 2. Учебная и воспитательная цель: «Формирование у студентов целостного представления о современных автоматизированных системах управления движением судов»
- 3. Состав ИСМ Интегрированная система ходового мостика (Integrated Bridge System) - это включающий в свой состав несколько
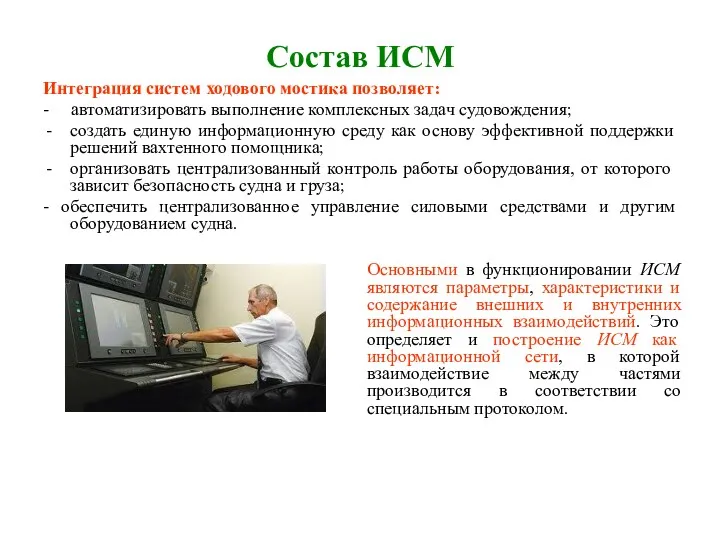
- 4. Состав ИСМ Интеграция систем ходового мостика позволяет: - автоматизировать выполнение комплексных задач судовождения; создать единую информационную
- 5. Состав ИСМ Типовой интегрированный мостик включает в себя: 1) Систему навигационных датчиков (Navigation Sensors); 2) Навигационно-информационную
- 6. Состав ИСМ 4) Систему оценки и оптимизации мореходности - COM (Vessel Seaworthiness Assessment and Optimization System);
- 7. Состав ИСМ 7) Централизованную систему мониторинга и сигнализации - ЦСМ (Centralized Monitoring and Alarm System); 8)
- 8. Состав ИСМ 10) Консоль управления движением с крыла мостика (Bridge Wing Console). 11) Интегрированные мостики, предназначенные
- 9. Состав ИСМ Современные ИСМ отвечают требованиям к управлению судном одним человеком (One man bridge operations -
- 10. Требования к ИСМ Интегрированная система ходового мостика должна рассматриваться как средство помощи капитану и штурманскому составу
- 11. Требования ИМО Эксплуатационные требования к интегрированным системам ходового мостика устанавливаются ИМО и национальными классификационными обществами. Общие
- 12. Требования ИМО Специальные требования к ИСМ изложены в Приложении 1 резолюции ИМО MSC.64(67) - Рекомендации по
- 13. Требования к объединяемому оборудованию. - Каждая часть ИСМ должна соответствовать общим требованиям к электронным навигационным средствам
- 14. Требования к интеграции - ИСМ предназначена обеспечивать работу систем, решающих две или более из следующих задач:
- 15. Требования к взаимодействию стандарты обмена данными: - Необходимо, чтобы обмен данными отвечал безопасной эксплуатации судна. -
- 16. Требование к контролю работы - Необходимо обеспечивать эффективный контроль работы ИСМ. - Управление аварийно-предупредительной сигнализацией в
- 17. Требования к электропитанию Требования к функционированию после перерывов в электроснабжении Электропитание ИСМ необходимо производить: - от
- 18. Требования к навигационному комплексу ОМВО-судов Изготавливаемые разными фирмами ИСМ отвечают требованиям к управлению судном одним человеком.
- 19. Требования к навигационному комплексу ОМВО-судов С учетом обобщенного перечня обязательных навигационных приборов и систем, которые должны
- 20. Требования к навигационному комплексу ОМВО-судов 2) На крыльях мостика должны быть расположены бортовые пульты управления (посты
- 21. Требования к навигационному комплексу ОМВО-судов 3) ИСМ должна непрерывно следить за безопасностью движения судна, контролировать работу
- 22. Требования к навигационному комплексу ОМВО-судов 4) Штурманскому составу должна быть предоставлена возможность установки времени (в пределах
- 24. Скачать презентацию
Учебная и воспитательная цель:
«Формирование у студентов целостного представления о современных
Учебная и воспитательная цель: «Формирование у студентов целостного представления о современных

Состав ИСМ
Интегрированная система ходового мостика (Integrated Bridge System) - это включающий
Состав ИСМ
Интегрированная система ходового мостика (Integrated Bridge System) - это включающий
Состав ИСМ
Интеграция систем ходового мостика позволяет:
- автоматизировать выполнение комплексных задач
Состав ИСМ
Интеграция систем ходового мостика позволяет:
- автоматизировать выполнение комплексных задач

Состав ИСМ
Типовой интегрированный мостик включает в себя:
1) Систему навигационных датчиков (Navigation
Состав ИСМ
Типовой интегрированный мостик включает в себя:
1) Систему навигационных датчиков (Navigation

Состав ИСМ
4) Систему оценки и оптимизации мореходности - COM (Vessel Seaworthiness
Состав ИСМ
4) Систему оценки и оптимизации мореходности - COM (Vessel Seaworthiness

Состав ИСМ
7) Централизованную систему мониторинга и сигнализации - ЦСМ (Centralized Monitoring
Состав ИСМ
7) Централизованную систему мониторинга и сигнализации - ЦСМ (Centralized Monitoring

Состав ИСМ
10) Консоль управления движением с крыла мостика (Bridge Wing Console).
11)
Состав ИСМ
10) Консоль управления движением с крыла мостика (Bridge Wing Console).
11)

Состав ИСМ
Современные ИСМ отвечают требованиям к управлению судном одним человеком (One
Состав ИСМ
Современные ИСМ отвечают требованиям к управлению судном одним человеком (One

Требования к ИСМ
Интегрированная система ходового мостика должна рассматриваться как средство помощи
Требования к ИСМ
Интегрированная система ходового мостика должна рассматриваться как средство помощи
Требования ИМО
Эксплуатационные требования к интегрированным системам ходового мостика устанавливаются ИМО и
Требования ИМО
Эксплуатационные требования к интегрированным системам ходового мостика устанавливаются ИМО и
Требования ИМО
Специальные требования к ИСМ изложены в Приложении 1 резолюции ИМО
Требования ИМО
Специальные требования к ИСМ изложены в Приложении 1 резолюции ИМО
Требования к объединяемому оборудованию.
- Каждая часть ИСМ должна соответствовать общим
Требования к объединяемому оборудованию.
- Каждая часть ИСМ должна соответствовать общим
Требования к интеграции
- ИСМ предназначена обеспечивать работу систем, решающих две или
Требования к интеграции
- ИСМ предназначена обеспечивать работу систем, решающих две или
Требования к взаимодействию
стандарты обмена данными:
- Необходимо, чтобы обмен данными отвечал безопасной
Требования к взаимодействию
стандарты обмена данными:
- Необходимо, чтобы обмен данными отвечал безопасной
Требование к контролю работы
- Необходимо обеспечивать эффективный контроль работы ИСМ.
- Управление
Требование к контролю работы
- Необходимо обеспечивать эффективный контроль работы ИСМ.
- Управление
Требования к электропитанию
Требования к функционированию после перерывов в электроснабжении
Электропитание ИСМ необходимо
Требования к электропитанию
Требования к функционированию после перерывов в электроснабжении
Электропитание ИСМ необходимо
Требования к навигационному комплексу ОМВО-судов
Изготавливаемые разными фирмами ИСМ отвечают требованиям
Требования к навигационному комплексу ОМВО-судов
Изготавливаемые разными фирмами ИСМ отвечают требованиям

Требования к навигационному комплексу ОМВО-судов
С учетом обобщенного перечня обязательных навигационных приборов
Требования к навигационному комплексу ОМВО-судов
С учетом обобщенного перечня обязательных навигационных приборов

Требования к навигационному комплексу ОМВО-судов
2) На крыльях мостика должны быть расположены
Требования к навигационному комплексу ОМВО-судов
2) На крыльях мостика должны быть расположены

Требования к навигационному комплексу ОМВО-судов
3) ИСМ должна непрерывно следить за безопасностью
Требования к навигационному комплексу ОМВО-судов
3) ИСМ должна непрерывно следить за безопасностью

Требования к навигационному комплексу ОМВО-судов
4) Штурманскому составу должна быть предоставлена возможность
Требования к навигационному комплексу ОМВО-судов
4) Штурманскому составу должна быть предоставлена возможность
 Плоскопараллельное движение твердого тела
Плоскопараллельное движение твердого тела Сопротивление материалов. Курс лекций
Сопротивление материалов. Курс лекций Робототехника. Робот-дворник
Робототехника. Робот-дворник Явление электромагнитной индукции
Явление электромагнитной индукции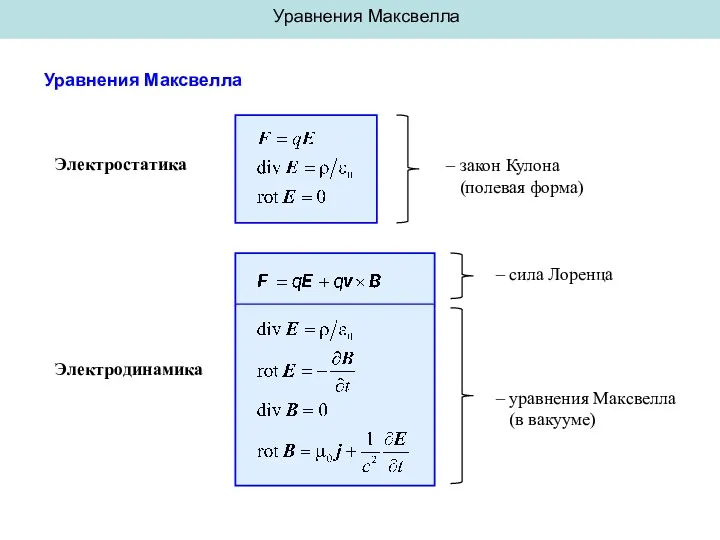 Уравнения Максвелла
Уравнения Максвелла Система автоматического управления
Система автоматического управления Следствия из уравнений Максвелла: распространение ЭМВ в пространстве, свойства ЭМВ
Следствия из уравнений Максвелла: распространение ЭМВ в пространстве, свойства ЭМВ Электротехника. Электрическое поле. Электрические и магнитные цепи. Анализ и расчет электрических цепей
Электротехника. Электрическое поле. Электрические и магнитные цепи. Анализ и расчет электрических цепей Основы аэродинамики и динамики полёта. Занятие 1
Основы аэродинамики и динамики полёта. Занятие 1 Измерение длины световой волны с помощью дифракционной решётки. Лабораторная работа №22:
Измерение длины световой волны с помощью дифракционной решётки. Лабораторная работа №22: Технология мини-исследования на уроках физики
Технология мини-исследования на уроках физики Однородный полупроводник
Однородный полупроводник Электротехника и электроника. Методы расчета сложных линейных цепей постоянного тока. (Лекция 2)
Электротехника и электроника. Методы расчета сложных линейных цепей постоянного тока. (Лекция 2) Термодинамика и теплопередача. Внутренняя энергия
Термодинамика и теплопередача. Внутренняя энергия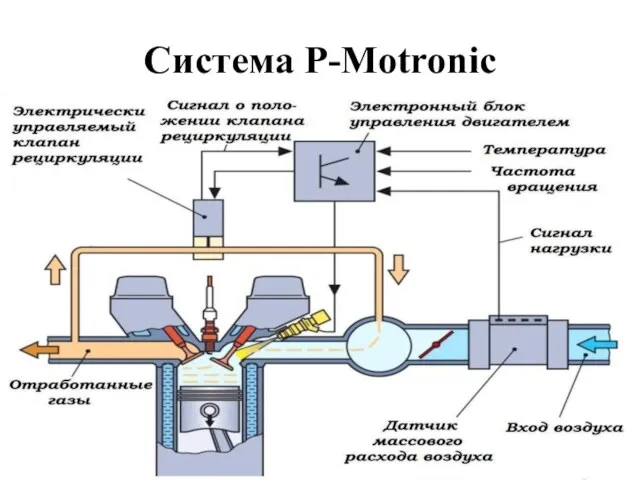 Система P-Motronic
Система P-Motronic Технический осмотр и ремонт ходовой части автомобиля. Подвеска
Технический осмотр и ремонт ходовой части автомобиля. Подвеска Урок + презентация. Тема: Сила Ампера
Урок + презентация. Тема: Сила Ампера Lektsia_7_PolyarizatsiaMalyus-Bryuster
Lektsia_7_PolyarizatsiaMalyus-Bryuster Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1)
Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1) Первое начало термодинамики
Первое начало термодинамики Основы классической термодинамики. Первое начало термодинамики. (Лекция 10)
Основы классической термодинамики. Первое начало термодинамики. (Лекция 10) Динамика поступательного движения
Динамика поступательного движения Назначение и состав космического комплекса. Лекция №2
Назначение и состав космического комплекса. Лекция №2 Скорость при равномерном движении
Скорость при равномерном движении Цепи синусоидального напряжения
Цепи синусоидального напряжения Определение плотности куска мыла
Определение плотности куска мыла Изотопы. Радиоактивные превращения атомных ядер
Изотопы. Радиоактивные превращения атомных ядер Плавание тел в жидкости
Плавание тел в жидкости