- Система автоматического управления

Содержание
- 2. Функциональная схема САУ ЗУ – задающее устройство, ИР - измеритель рассогласования; УПУ – усилительно-преобразовательное устройство, состоящее
- 3. Статические характеристики рабочих органов и исполнительных механизмов Объектами управления проектируемой САУ могут быть аэродинамические рули, подвижные
- 4. Кинематическая модель аэродинамического руля. VB - скорость набегающего воздушного потока, α - угол отклонения руля от
- 5. Статическая характеристика объекта управления с шарнирным . В случае отклонения руля на угол, превышающий 30, нелинейная
- 6. ВЫБОР ЭЛЕМЕНТОВ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СТАТИЧЕСКИЙ РАСЧЕТ. Сведения о нагрузке: Момент нагрузки: Мн = 40
- 7. Выбираем двигательАДП-263, с номинальной мощностью Pn=24вт. Берем технические данные электродвигателя и габаритные размеры электродвигателя .
- 8. Эскиз электродвигателя АДП-263.
- 9. Строим графики зависимостей Em и Mэкв от i для определения оптимального передаточного числа редуктора.
- 10. Кинематическая схема редуктора.
- 11. Построение измерителя рассогласования и выбор первичных измерительных преобразователей. Поскольку угол поворота объекта управления ограничен αm=0.4рад и
- 12. Принципиальная схема измерителя рассогласования, построенного по компенсационной схеме на ВТ.
- 13. В качестве измерителя рассогласования выберем вращающийся трансформатор БСКТ-220-1Д . Технические данные и геометрические размеры вращающихся трансформаторов
- 14. Эскиз конструкции вращающегося трансформатора БСКТ-220-1
- 15. ДИНАМИЧЕСКИЙ РАСЧЕТ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ .
- 16. Структурная схема математической модели исполнительного механизма, нагруженного шарнирным моментом.
- 17. Вычислительная модель исследуемой САУ в Simulink MatLab.
- 18. Переходный процесс при ПФ ИМ. Из рисунка 3.3 (амплитуда первых колебаний в передаточной функции выше 1,5)
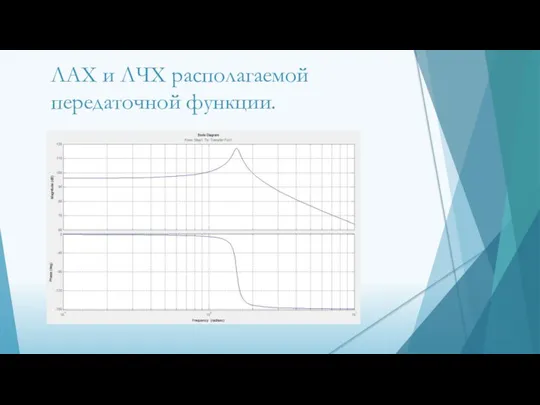
- 19. Синтез структуры и параметров звеньев коррекции методом логарифмических амплитудно-частотных характеристик. Производим построение располагаемой логарифмической амплитудно-частотной характеристики
- 20. ЛАХ и ЛЧХ располагаемой передаточной функции.
- 21. График асимптотических ЛАХ.
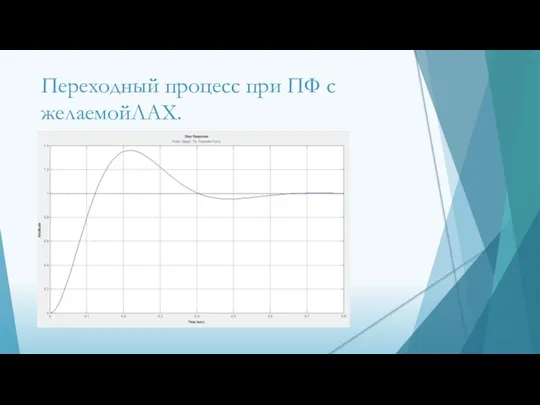
- 22. Переходный процесс при ПФ с желаемойЛАХ.
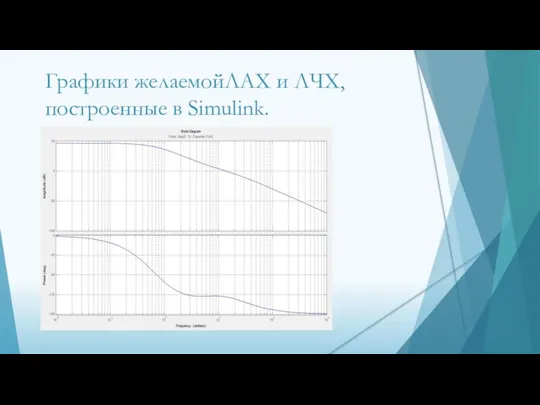
- 23. Графики желаемойЛАХ и ЛЧХ, построенные в Simulink.
- 24. Схемная реализация звена коррекции с передаточной функцией Wk1.
- 25. Схемная реализация звена коррекции с передаточной функцией Wk2.
- 26. Схемная реализация корректирующего устройства с передаточной функцией Wk.
- 27. Состав принципиальной электрической схемы САУ.
- 28. Фазочувствительный выпрямитель.
- 29. Модулятор.
- 30. Однотактный усилитель мощности.
- 31. Разработка механического узла. Под механическим узлом понимается совокупность элементов САУ, которые механически связаны между собой: передаточного
- 32. Сборка редуктора. Перед сборкой внутреннюю часть корпуса редуктора тщательно очищают. Перед общей сборкой собирают валы с
- 33. ОХРАНА ТРУДА. ПОЖАРНАЯ БЕЗОПАСНОСТЬ. ОХРАНА ОКРУЖАЮШЕЙ СРЕДЫ.
- 34. Охрана труда. Государственные нормативные требования охраны труда устанавливают правила, процедуры и критерии, направленные на сохранение жизни
- 35. Каждый работник обязан : Соблюдать требования охраны труда; Правильно применять средства индивидуальной и коллективной защиты; Проходить
- 36. Пожарная безопасность.
- 37. Противопожарная защита должна достигаться применением одного из следующих способов или их комбинаций: применением средств пожаротушения и
- 38. Охрана окружающей среды. Природоохранной является любая деятельность, направленная на сохранение качества окружающей среды на уровне, обеспечивающем
- 39. Существуют два основных направления природоохранной деятельности предприятий. Первое — очистка вредных выбросов. Второе направление — устранение
- 40. Список используемой литературы : 1. Шишлаков В.Ф., Т. Г. Полякова, Шишлаков Д. В.Проектирование электромеханических систем автоматического
- 41. Спасибо за внимание ☺
- 43. Скачать презентацию
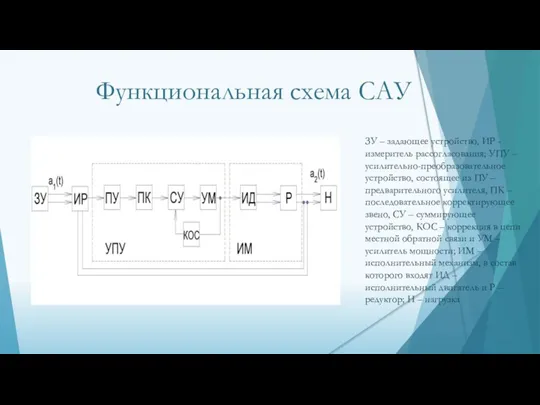
Функциональная схема САУ
ЗУ – задающее устройство, ИР - измеритель рассогласования; УПУ
Функциональная схема САУ
ЗУ – задающее устройство, ИР - измеритель рассогласования; УПУ
Статические характеристики рабочих органов и исполнительных механизмов
Объектами управления проектируемой САУ могут
Статические характеристики рабочих органов и исполнительных механизмов
Объектами управления проектируемой САУ могут
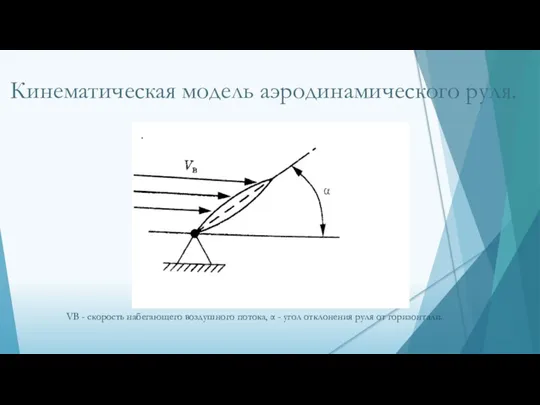
Кинематическая модель аэродинамического руля.
VB - скорость набегающего воздушного потока, α
Кинематическая модель аэродинамического руля.
VB - скорость набегающего воздушного потока, α
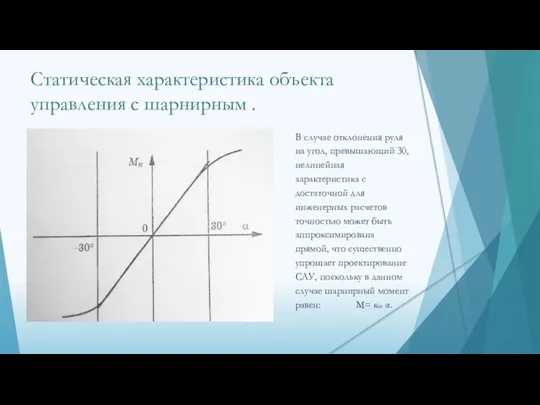
Статическая характеристика объекта управления с шарнирным .
В случае отклонения руля на
Статическая характеристика объекта управления с шарнирным .
В случае отклонения руля на
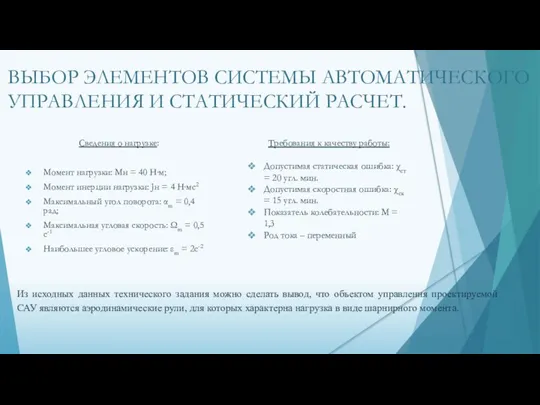
ВЫБОР ЭЛЕМЕНТОВ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СТАТИЧЕСКИЙ РАСЧЕТ.
Сведения о нагрузке:
Момент нагрузки:
ВЫБОР ЭЛЕМЕНТОВ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СТАТИЧЕСКИЙ РАСЧЕТ.
Сведения о нагрузке:
Момент нагрузки:
Выбираем двигательАДП-263, с номинальной мощностью
Pn=24вт.
Берем технические данные электродвигателя и габаритные
Выбираем двигательАДП-263, с номинальной мощностью
Pn=24вт.
Берем технические данные электродвигателя и габаритные

Эскиз электродвигателя АДП-263.
Эскиз электродвигателя АДП-263.
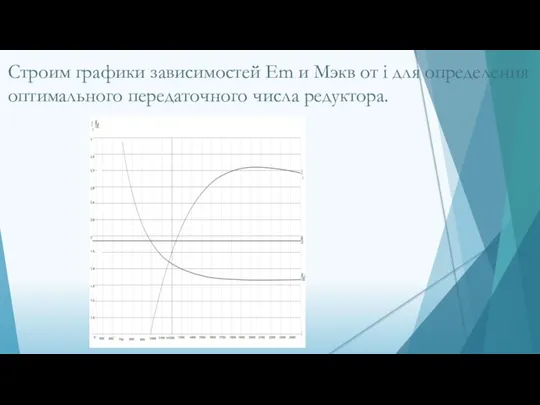
Строим графики зависимостей Em и Mэкв от i для определения оптимального
Строим графики зависимостей Em и Mэкв от i для определения оптимального

Кинематическая схема редуктора.
Кинематическая схема редуктора.
Построение измерителя рассогласования
и выбор первичных измерительных преобразователей.
Поскольку угол поворота объекта
Построение измерителя рассогласования
и выбор первичных измерительных преобразователей.
Поскольку угол поворота объекта
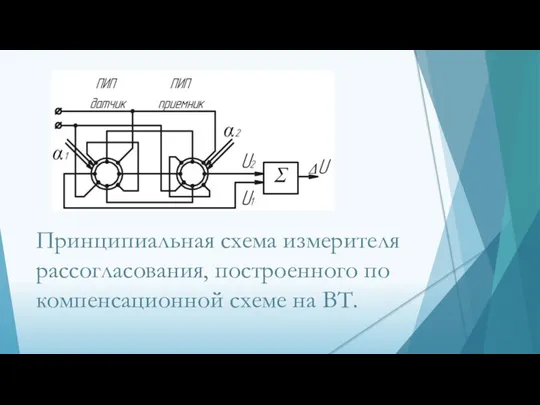
Принципиальная схема измерителя
рассогласования, построенного по компенсационной схеме на ВТ.
Принципиальная схема измерителя
рассогласования, построенного по компенсационной схеме на ВТ.
В качестве измерителя рассогласования выберем вращающийся трансформатор БСКТ-220-1Д .
Технические данные и
В качестве измерителя рассогласования выберем вращающийся трансформатор БСКТ-220-1Д .
Технические данные и
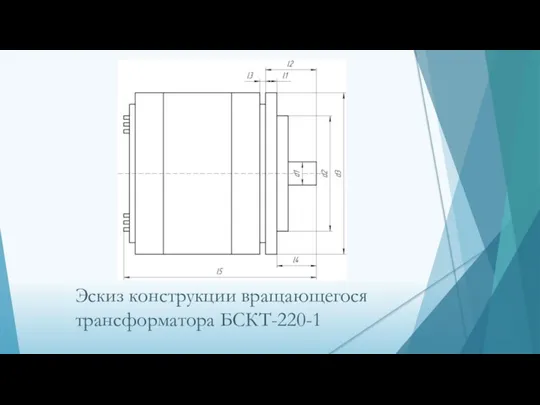
Эскиз конструкции вращающегося трансформатора БСКТ-220-1
Эскиз конструкции вращающегося трансформатора БСКТ-220-1
ДИНАМИЧЕСКИЙ РАСЧЕТ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ .
ДИНАМИЧЕСКИЙ РАСЧЕТ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ .
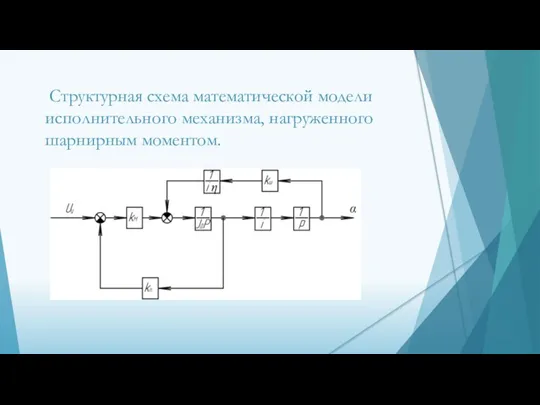
Структурная схема математической модели исполнительного механизма, нагруженного шарнирным моментом.
Структурная схема математической модели исполнительного механизма, нагруженного шарнирным моментом.
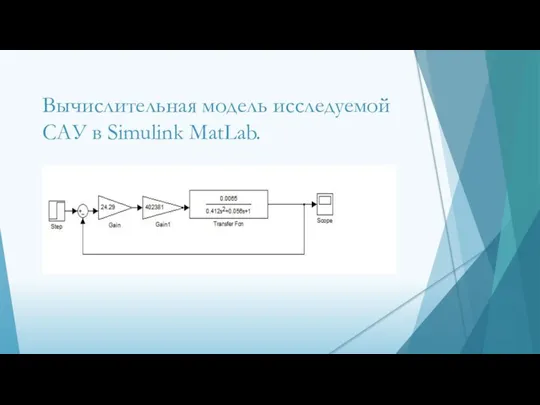
Вычислительная модель исследуемой САУ в Simulink MatLab.
Вычислительная модель исследуемой САУ в Simulink MatLab.
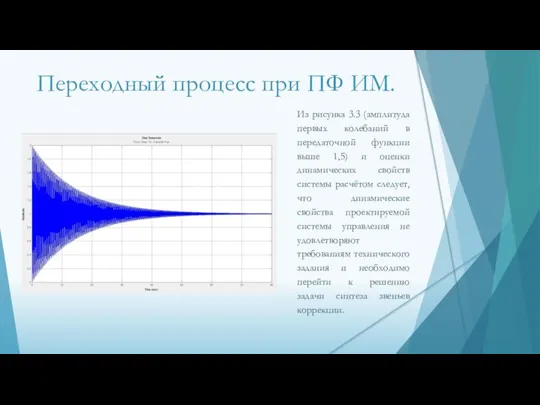
Переходный процесс при ПФ ИМ.
Из рисунка 3.3 (амплитуда первых колебаний в
Переходный процесс при ПФ ИМ.
Из рисунка 3.3 (амплитуда первых колебаний в
Синтез структуры и параметров звеньев
коррекции методом логарифмических
амплитудно-частотных характеристик.
Производим построение располагаемой
Синтез структуры и параметров звеньев
коррекции методом логарифмических
амплитудно-частотных характеристик.
Производим построение располагаемой
ЛАХ и ЛЧХ располагаемой передаточной функции.
ЛАХ и ЛЧХ располагаемой передаточной функции.
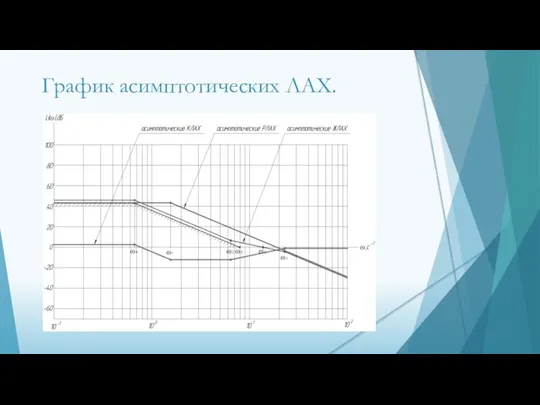
График асимптотических ЛАХ.
График асимптотических ЛАХ.
Переходный процесс при ПФ с желаемойЛАХ.
Переходный процесс при ПФ с желаемойЛАХ.
Графики желаемойЛАХ и ЛЧХ, построенные в Simulink.
Графики желаемойЛАХ и ЛЧХ, построенные в Simulink.
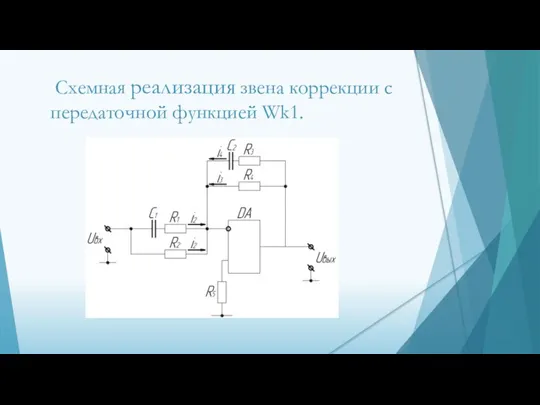
Схемная реализация звена коррекции с передаточной функцией Wk1.
Схемная реализация звена коррекции с передаточной функцией Wk1.
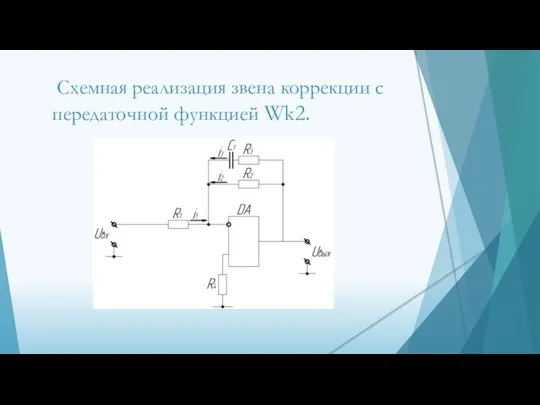
Схемная реализация звена коррекции с передаточной функцией Wk2.
Схемная реализация звена коррекции с передаточной функцией Wk2.
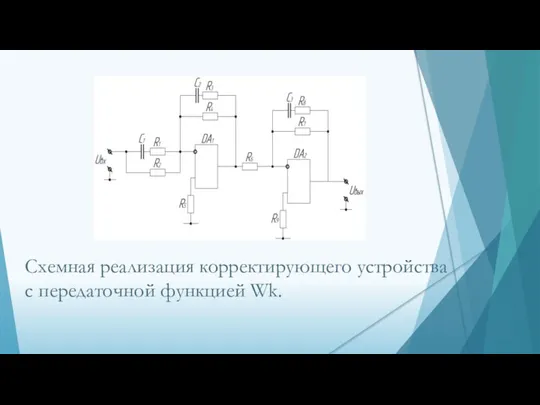
Схемная реализация корректирующего устройства
с передаточной функцией Wk.
Схемная реализация корректирующего устройства
с передаточной функцией Wk.
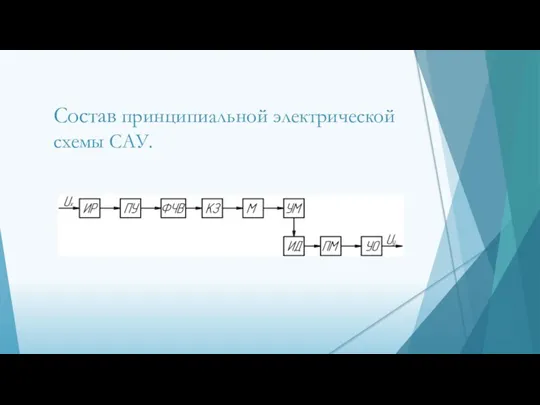
Состав принципиальной электрической схемы САУ.
Состав принципиальной электрической схемы САУ.
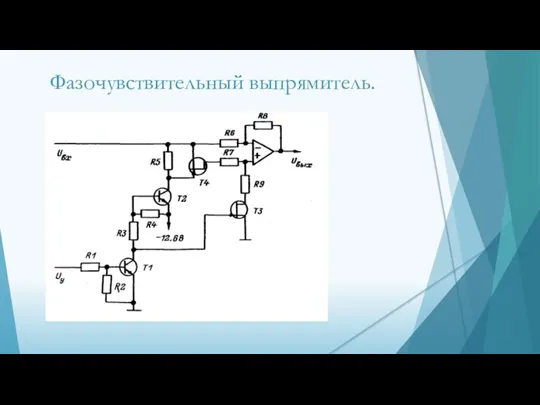
Фазочувствительный выпрямитель.
Фазочувствительный выпрямитель.
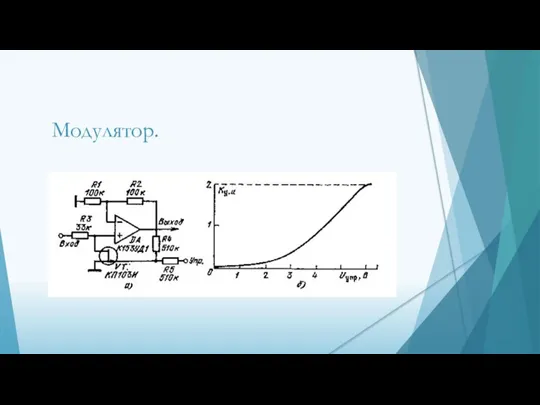
Модулятор.
Модулятор.
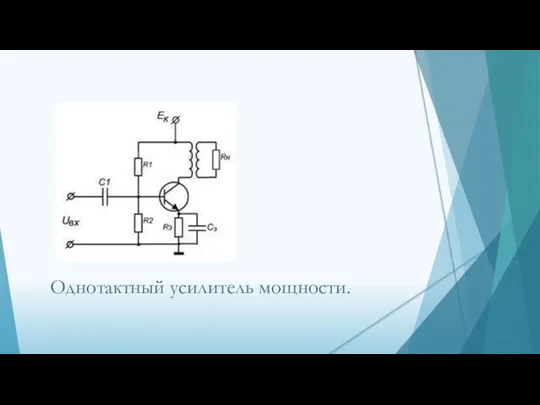
Однотактный усилитель мощности.
Однотактный усилитель мощности.
Разработка механического узла.
Под механическим узлом понимается совокупность элементов САУ, которые механически
Разработка механического узла.
Под механическим узлом понимается совокупность элементов САУ, которые механически

Сборка редуктора.
Перед сборкой внутреннюю часть корпуса редуктора тщательно очищают.
Перед общей
Сборка редуктора.
Перед сборкой внутреннюю часть корпуса редуктора тщательно очищают.
Перед общей
ОХРАНА ТРУДА.
ПОЖАРНАЯ БЕЗОПАСНОСТЬ.
ОХРАНА
ОКРУЖАЮШЕЙ СРЕДЫ.
ОХРАНА ТРУДА.
ПОЖАРНАЯ БЕЗОПАСНОСТЬ.
ОХРАНА
ОКРУЖАЮШЕЙ СРЕДЫ.
Охрана труда.
Государственные нормативные требования охраны труда устанавливают правила, процедуры и критерии,
Охрана труда.
Государственные нормативные требования охраны труда устанавливают правила, процедуры и критерии,
Каждый работник обязан :
Соблюдать требования охраны труда;
Правильно применять средства индивидуальной и
Каждый работник обязан :
Соблюдать требования охраны труда;
Правильно применять средства индивидуальной и
Пожарная
безопасность.
Пожарная
безопасность.
Противопожарная защита должна достигаться применением одного из следующих способов или их
Противопожарная защита должна достигаться применением одного из следующих способов или их
Охрана окружающей среды.
Природоохранной является любая деятельность, направленная на сохранение качества окружающей
Охрана окружающей среды.
Природоохранной является любая деятельность, направленная на сохранение качества окружающей
Существуют два основных направления природоохранной деятельности предприятий.
Первое — очистка вредных
Существуют два основных направления природоохранной деятельности предприятий.
Первое — очистка вредных
Список используемой литературы :
1. Шишлаков В.Ф., Т. Г. Полякова, Шишлаков
Список используемой литературы :
1. Шишлаков В.Ф., Т. Г. Полякова, Шишлаков
Спасибо
за внимание ☺
Спасибо
за внимание ☺
 Агрегатные состояния вещества. Условия равновесия фаз
Агрегатные состояния вещества. Условия равновесия фаз Электромагнитные волны
Электромагнитные волны урок физики в 8 классе Мир сквозь очки
урок физики в 8 классе Мир сквозь очки Действие физических и химических факторов окружающей среды на микроорганизмы
Действие физических и химических факторов окружающей среды на микроорганизмы Работа тока и мощность электрического тока
Работа тока и мощность электрического тока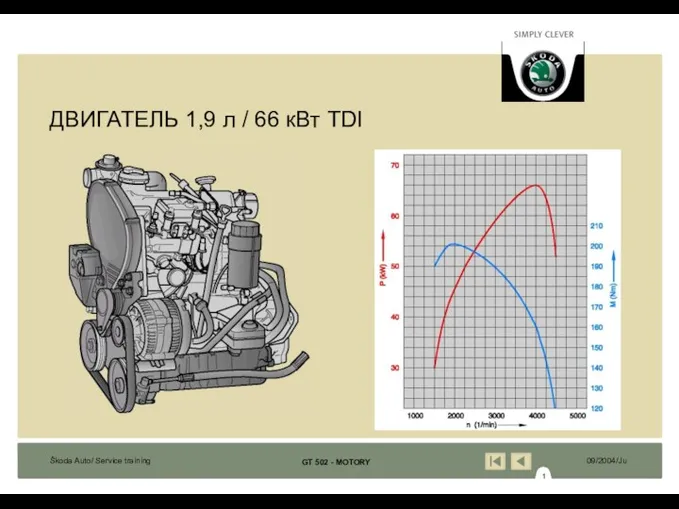 Двигатель накаливания TDI
Двигатель накаливания TDI Магнитное поле
Магнитное поле Адиабатическое приближение в твердом теле
Адиабатическое приближение в твердом теле Простые механизмы
Простые механизмы Электропитание устройств и систем телекоммуникаций
Электропитание устройств и систем телекоммуникаций Сила давления жидкости на плоские и криволинейные стенки
Сила давления жидкости на плоские и криволинейные стенки Компрессор холодильника
Компрессор холодильника Проектирование блока питания, оконечного усилителя звуковой частоты
Проектирование блока питания, оконечного усилителя звуковой частоты Тепловые двигатели
Тепловые двигатели Разметка и строгание древесины
Разметка и строгание древесины Отличительные особенности конструкции базовой машины КУР 31
Отличительные особенности конструкции базовой машины КУР 31 Барабанные сепараторы
Барабанные сепараторы Телеграф и перевернутая пирамида
Телеграф и перевернутая пирамида Радиоактивные превращения атомных ядер. 9 класс
Радиоактивные превращения атомных ядер. 9 класс Експлуатація навчального вертольта. Експлуатаційні обмеження вертольота Мі-2
Експлуатація навчального вертольта. Експлуатаційні обмеження вертольота Мі-2 План урока натему решение задач на закон Ома
План урока натему решение задач на закон Ома Изготовление дисков
Изготовление дисков Измерение аберраций оптических систем
Измерение аберраций оптических систем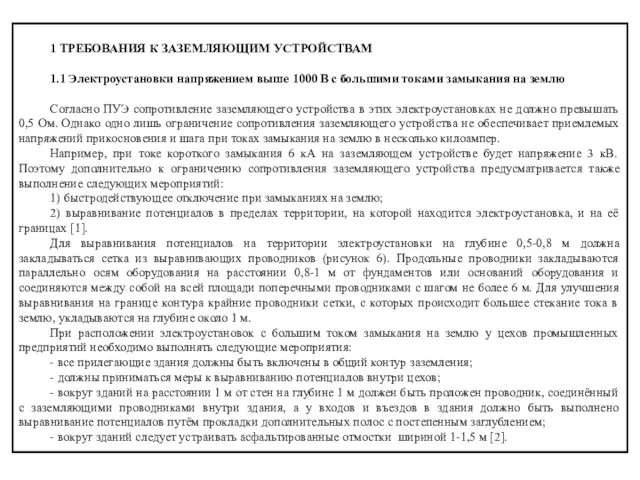 Требования к заземляющим устройствам
Требования к заземляющим устройствам Презентация по физике на тему:Законы Ньютона
Презентация по физике на тему:Законы Ньютона Выяснение условия равновесия рычага
Выяснение условия равновесия рычага Дифракция света
Дифракция света Лабораторная работа № 8 Исследование зависимости силы тока в проводнике от напряжения на его концах при постоянном сопротивлении. Измерение сопротивления проводника
Лабораторная работа № 8 Исследование зависимости силы тока в проводнике от напряжения на его концах при постоянном сопротивлении. Измерение сопротивления проводника