- Inverzná kinematika – aprox. metóda

Содержание

Algoritmus inverznej kinematiky
Vstupy: počiatočný stav, požadovaná poloha, parameter Δ.
Volaná funkcia: Priama
Algoritmus inverznej kinematiky
Vstupy: počiatočný stav, požadovaná poloha, parameter Δ.
Volaná funkcia: Priama

Algoritmus inverznej kinematiky
Algoritmus inverznej kinematiky
 Основы теории напряженного состояния. Понятия главных площадок и главных напряжений. Лекция 9
Основы теории напряженного состояния. Понятия главных площадок и главных напряжений. Лекция 9 Вес воздуха. Атмосферное давление
Вес воздуха. Атмосферное давление Организация технического обслуживания и ремонта автомобиля КамАЗ 4311
Организация технического обслуживания и ремонта автомобиля КамАЗ 4311 Электромагнитные колебания и волны
Электромагнитные колебания и волны Строительная механика. Расчёт сооружений на действие подвижных и других временных нагрузок. Теория линий влияния
Строительная механика. Расчёт сооружений на действие подвижных и других временных нагрузок. Теория линий влияния Простые механизмы.4 класс
Простые механизмы.4 класс Инерция. Галилео Галилей
Инерция. Галилео Галилей Электромагнитное поле. Электромагнитные волны
Электромагнитное поле. Электромагнитные волны Тракт приема радиолокационной информации. Сведения о радиоприемных устройствах. (Тема 5.1)
Тракт приема радиолокационной информации. Сведения о радиоприемных устройствах. (Тема 5.1)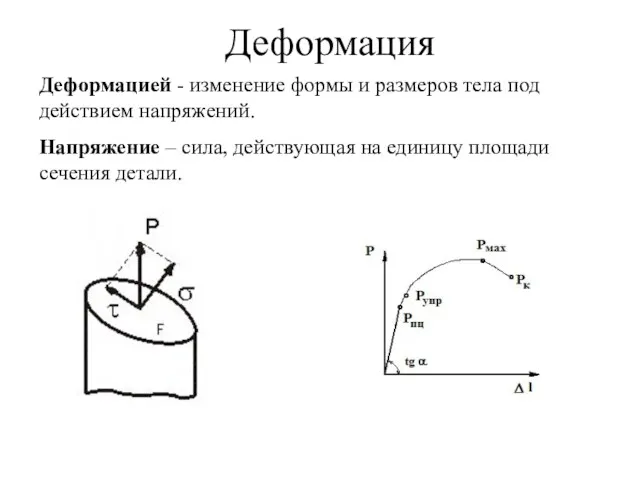 Деформация. Механизмы пластической деформации
Деформация. Механизмы пластической деформации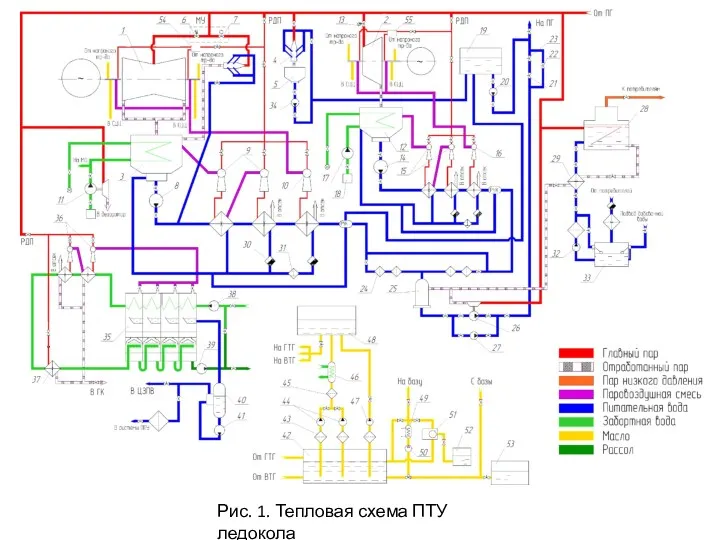 Системы ПТУ 2
Системы ПТУ 2 Неделя физики
Неделя физики Расчет потенциалов простейших электростатических полей
Расчет потенциалов простейших электростатических полей Магнетронное распыление
Магнетронное распыление Линзы. Оптические приборы
Линзы. Оптические приборы Охлаждение бесконечных тел. Нестационарная теплопроводность
Охлаждение бесконечных тел. Нестационарная теплопроводность Общее устройство автомобиля
Общее устройство автомобиля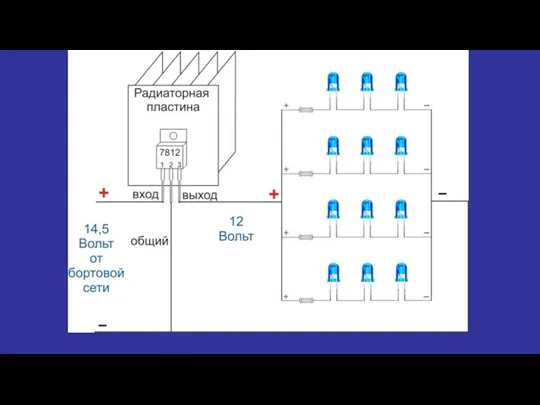 Электрическая схема светильника с регулировкой мощности
Электрическая схема светильника с регулировкой мощности Открытый урок по физике в 8 классе по теме Испарение и конденсация
Открытый урок по физике в 8 классе по теме Испарение и конденсация Свободные и вынужденные колебания, колебательные системы
Свободные и вынужденные колебания, колебательные системы Урок-лаборатория Электризация тел, электрический заряд
Урок-лаборатория Электризация тел, электрический заряд Восстановительный поезд
Восстановительный поезд Жидкостные термометры
Жидкостные термометры Реечная передача
Реечная передача Основные понятия и законы динамики
Основные понятия и законы динамики Электрические измерения и приборы
Электрические измерения и приборы Кипение. Удельная теплота парообразования и конденсации.
Кипение. Удельная теплота парообразования и конденсации. Тема №4. Электрооборудование. Занятие №1. Общее устройство электрооборудования
Тема №4. Электрооборудование. Занятие №1. Общее устройство электрооборудования