- Использование сенсорных систем в мобильной робототехнике

Содержание
- 2. Какие датчики используются в роботе В зависимости от вида входной (измеряемой) величины : датчик расстояния, дальномер,
- 4. Тактильный сенсор Тактильные сенсоры наделяют робота возможностью реагировать на контакты (силы), возникающие между ним и другими
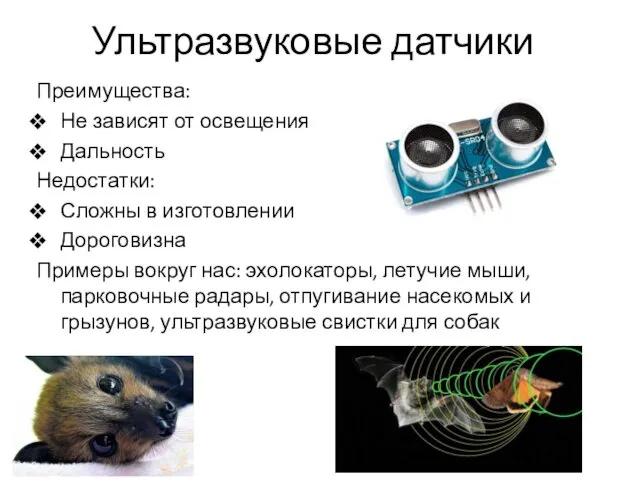
- 5. Ультразвуковые датчики Работа ультразвукового датчика основана на принципе эхолокации. Динамик прибора издает УЗ импульс на определенной
- 6. Преимущества: Не зависят от освещения Дальность Недостатки: Сложны в изготовлении Дороговизна Примеры вокруг нас: эхолокаторы, летучие
- 7. Инфракрасный датчик движения Самый доступный и простой вид датчиков, которые применяются в роботах для определения приближения.
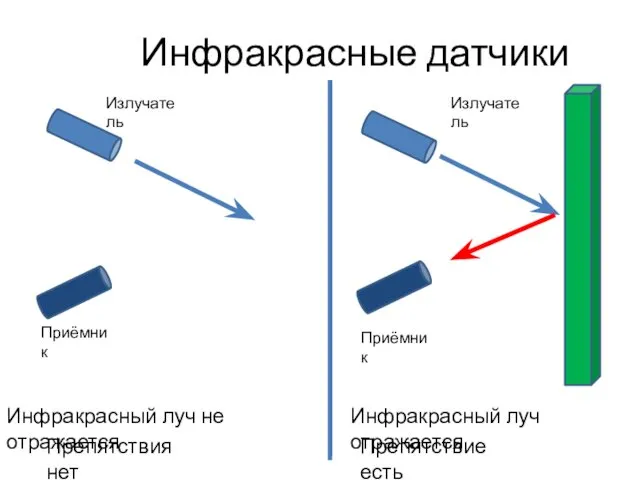
- 8. Инфракрасные датчики Препятствие есть Инфракрасный луч отражается Препятствия нет Инфракрасный луч не отражается Приёмник Приёмник Излучатель
- 9. Инфракрасные датчики Преимущества: Дальность Недостатки: Отражается от стен Примеры из жизни: пульт от телевизора, ИК-порт
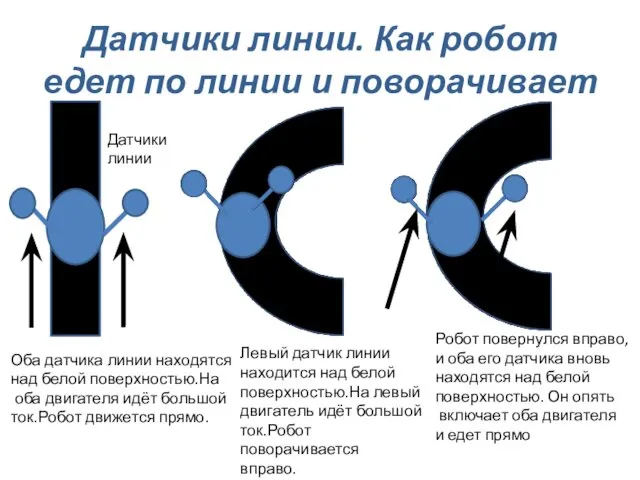
- 10. Датчики линии. Как робот едет по линии и поворачивает Оба датчика линии находятся над белой поверхностью.На
- 11. Датчик температуры Основные типы: Терморезисторы - полупроводниковые приборы, сопротивление которых сильно зависит от температуры. Термопары основаны
- 13. Скачать презентацию
Какие датчики используются в роботе
В зависимости от вида входной (измеряемой) величины :
Какие датчики используются в роботе В зависимости от вида входной (измеряемой) величины :


Тактильный сенсор
Тактильные сенсоры наделяют робота возможностью реагировать на контакты (силы), возникающие
Тактильный сенсор
Тактильные сенсоры наделяют робота возможностью реагировать на контакты (силы), возникающие

Ультразвуковые датчики
Работа ультразвукового датчика основана на принципе эхолокации.
Динамик прибора издает УЗ
Ультразвуковые датчики
Работа ультразвукового датчика основана на принципе эхолокации.
Динамик прибора издает УЗ
Преимущества:
Не зависят от освещения
Дальность
Недостатки:
Сложны в изготовлении
Дороговизна
Примеры вокруг нас: эхолокаторы, летучие мыши,
Преимущества:
Не зависят от освещения
Дальность
Недостатки:
Сложны в изготовлении
Дороговизна
Примеры вокруг нас: эхолокаторы, летучие мыши,

Инфракрасный датчик движения
Самый доступный и простой вид датчиков, которые применяются в
Инфракрасный датчик движения
Самый доступный и простой вид датчиков, которые применяются в
Инфракрасные датчики
Препятствие есть
Инфракрасный луч отражается
Препятствия нет
Инфракрасный луч не отражается
Приёмник
Приёмник
Излучатель
Излучатель
Инфракрасные датчики
Препятствие есть
Инфракрасный луч отражается
Препятствия нет
Инфракрасный луч не отражается
Приёмник
Приёмник
Излучатель
Излучатель

Инфракрасные датчики
Преимущества:
Дальность
Недостатки:
Отражается от стен
Примеры из жизни: пульт от телевизора, ИК-порт
Инфракрасные датчики
Преимущества:
Дальность
Недостатки:
Отражается от стен
Примеры из жизни: пульт от телевизора, ИК-порт
Датчики линии. Как робот едет по линии и поворачивает
Оба датчика линии
Датчики линии. Как робот едет по линии и поворачивает
Оба датчика линии
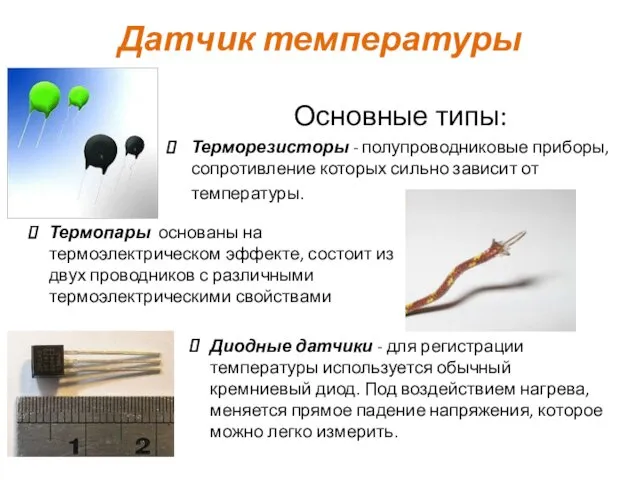
Датчик температуры
Основные типы:
Терморезисторы - полупроводниковые приборы, сопротивление которых сильно зависит от
Датчик температуры
Основные типы:
Терморезисторы - полупроводниковые приборы, сопротивление которых сильно зависит от
 Виникнення автобуса
Виникнення автобуса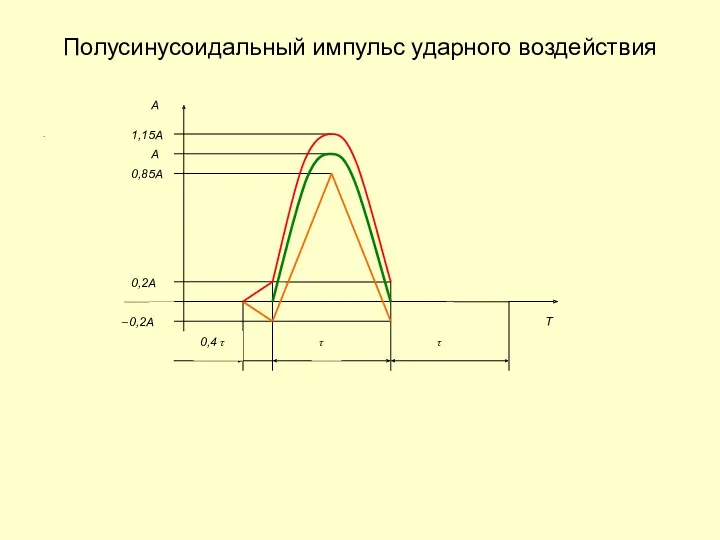 Полусинусоидальный импульс ударного воздействия
Полусинусоидальный импульс ударного воздействия Архимед күші
Архимед күші Рентгеновское излучение. Открытие рентгеновских лучей
Рентгеновское излучение. Открытие рентгеновских лучей Применение сообщающихся сосудов
Применение сообщающихся сосудов Уравнение состояния реального газа Ван-Дер-Ваальса. (Лекция 11)
Уравнение состояния реального газа Ван-Дер-Ваальса. (Лекция 11) Колебания и волны
Колебания и волны Фундаментальные концепции физического описания природы
Фундаментальные концепции физического описания природы Кинематика движения материальной точки. Тема 2
Кинематика движения материальной точки. Тема 2 Лазерный дальномер
Лазерный дальномер ЭМИ
ЭМИ Давление и Архимедова сила. Физика. 7 класс
Давление и Архимедова сила. Физика. 7 класс Свободный электронный газ
Свободный электронный газ Гидродинамика идеальной жидкости
Гидродинамика идеальной жидкости Экскаваторы непрерывного действия
Экскаваторы непрерывного действия Электромагнитные волны. основные понятия
Электромагнитные волны. основные понятия Экспериментальные методы исследования частиц
Экспериментальные методы исследования частиц Теплофизика. Теория теплообмена
Теплофизика. Теория теплообмена Изучение действия силы Кориолиса в движении маятника Фуко
Изучение действия силы Кориолиса в движении маятника Фуко Действия электрического тока
Действия электрического тока Сценарий внеклассного мероприятия Посвящение в электрики
Сценарий внеклассного мероприятия Посвящение в электрики кейс-технологии на уроках математике
кейс-технологии на уроках математике Роторный двигатель
Роторный двигатель Формирование учебно-познавательной компетенции учащихся второй ступени обучения на уроках физики
Формирование учебно-познавательной компетенции учащихся второй ступени обучения на уроках физики Презентация Формирование учебно-познавательной компетенции учащихся второй ступени обучения через создание проблемных ситуаций на уроках физики.
Презентация Формирование учебно-познавательной компетенции учащихся второй ступени обучения через создание проблемных ситуаций на уроках физики. Системы крепления концевого инструмента на станках с ЧПУ. Редимные средства
Системы крепления концевого инструмента на станках с ЧПУ. Редимные средства Техническая механика. Внутренние силы. Напряжения и деформации
Техническая механика. Внутренние силы. Напряжения и деформации презентация к уроку физики Законы сохранения
презентация к уроку физики Законы сохранения