- Качество САУ. Точность работы САУ в установившихся режимах

Содержание
- 2. Точность работы САУ в установившихся режимах Понятие статических и астатических систем регулирования. Системы автоматического регулирования (САР)
- 3. Рассмотрим статическую САР Рис.1. Упрощенная функциональная схема САР Yз – задающее значение; Y – выходная управляемая
- 4. Установившееся состояние рассмотренной системы описывается следующими уравнениями: Таким образом, показано, что в статических системах регулирования в
- 5. Астатические системы автоматического регулирования Астатические системы автоматического регулирования от статических систем отличаются отсутствием в статическом стационарном
- 6. Точность линейных САР в статическом стационарном режиме Определим для установившегося состояния изображение по Лапласу: полной ошибки
- 7. Определим выражение ошибки для статической системы. В этом случае передаточные функции регулятора и объекта управления не
- 8. В случае астатической системы возможны два варианта: 1 – астатический объект и статический регулятор; 2 –
- 10. Скачать презентацию
Точность работы САУ в установившихся режимах
Понятие статических и астатических систем регулирования.
Системы
Точность работы САУ в установившихся режимах
Понятие статических и астатических систем регулирования.
Системы
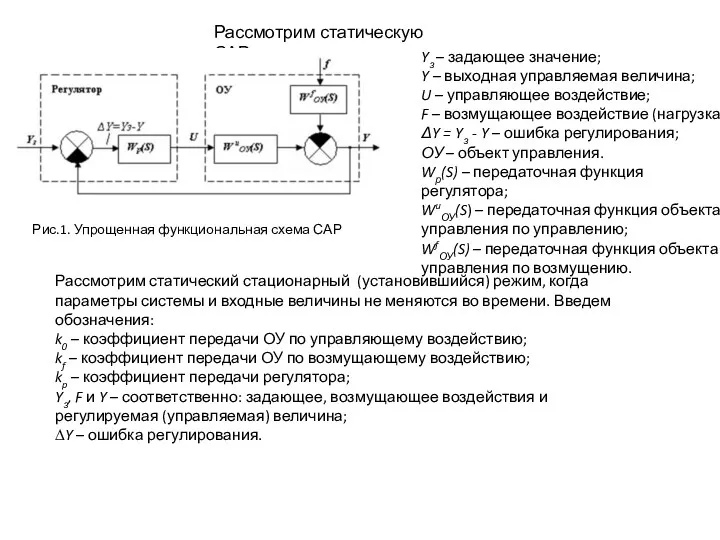
Рассмотрим статическую САР
Рис.1. Упрощенная функциональная схема САР
Yз – задающее значение;
Y
Рассмотрим статическую САР
Рис.1. Упрощенная функциональная схема САР
Yз – задающее значение;
Y
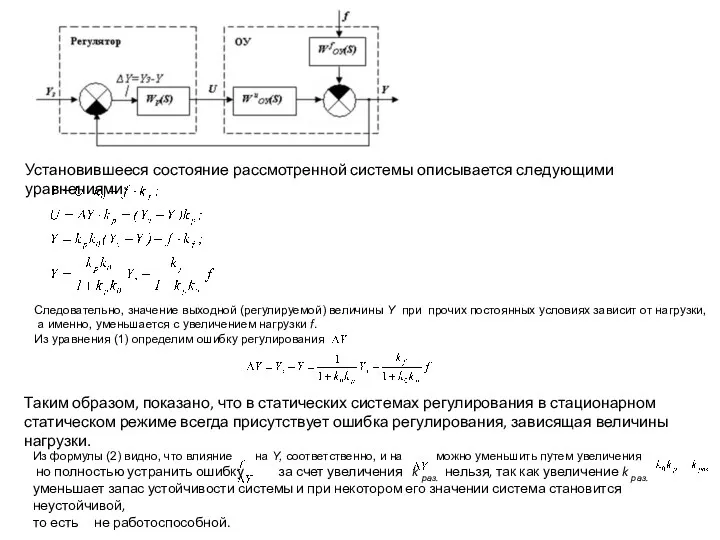
Установившееся состояние рассмотренной системы описывается следующими уравнениями:
Таким образом, показано,
Установившееся состояние рассмотренной системы описывается следующими уравнениями:
Таким образом, показано,
Астатические системы автоматического регулирования
Астатические системы автоматического регулирования от статических систем отличаются
Астатические системы автоматического регулирования
Астатические системы автоматического регулирования от статических систем отличаются
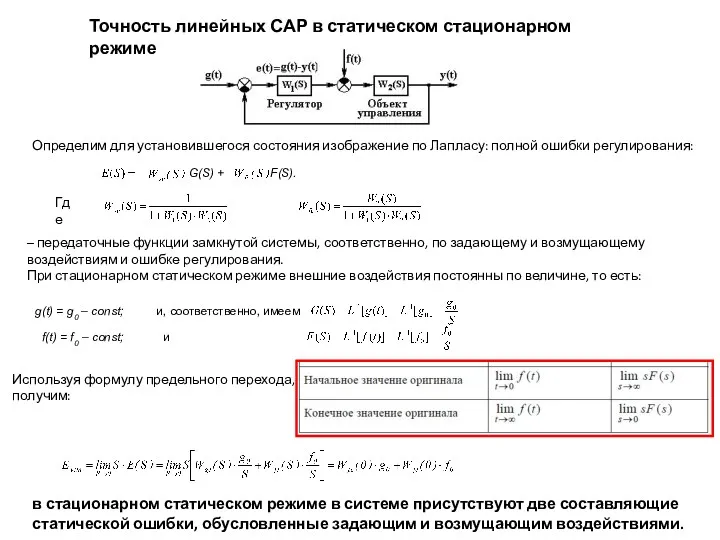
Точность линейных САР в статическом стационарном режиме
Определим для установившегося состояния изображение
Точность линейных САР в статическом стационарном режиме
Определим для установившегося состояния изображение
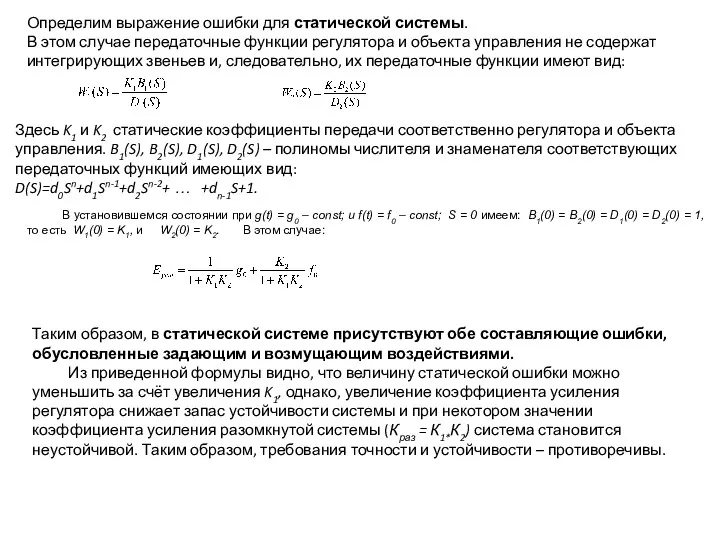
Определим выражение ошибки для статической системы.
В этом случае передаточные функции регулятора
Определим выражение ошибки для статической системы.
В этом случае передаточные функции регулятора
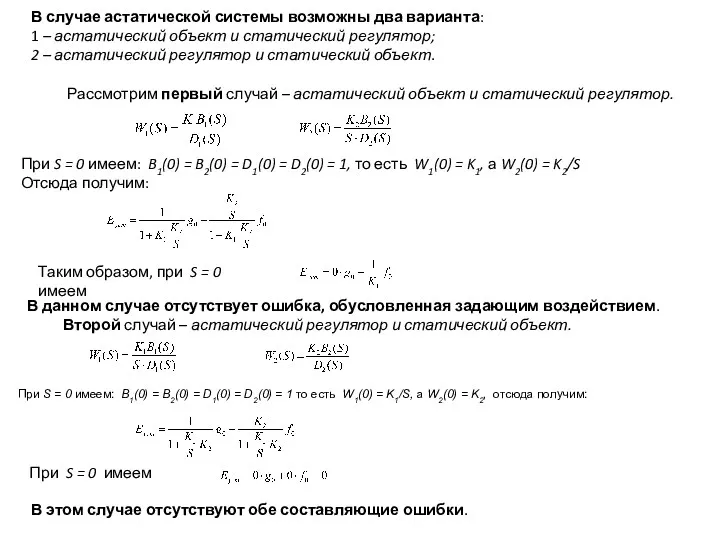
В случае астатической системы возможны два варианта:
1 – астатический объект и
В случае астатической системы возможны два варианта:
1 – астатический объект и
 Презентация по Физики 7 класс На тему Механическая работа и мощность.
Презентация по Физики 7 класс На тему Механическая работа и мощность. презентация к уроку плотность вещества
презентация к уроку плотность вещества Построение и применение комплексов радиорелейной, тропосферной, спутниковой связи
Построение и применение комплексов радиорелейной, тропосферной, спутниковой связи Презентация к уроку Виды сил. Равнодействующая сила. Правила сложения сил для 7 класса
Презентация к уроку Виды сил. Равнодействующая сила. Правила сложения сил для 7 класса Оборудование для смазочно-заправочных работ. Техническое обслуживание и ремонт автомобилей
Оборудование для смазочно-заправочных работ. Техническое обслуживание и ремонт автомобилей Устройство и назначение карданной передачи в автомобиле
Устройство и назначение карданной передачи в автомобиле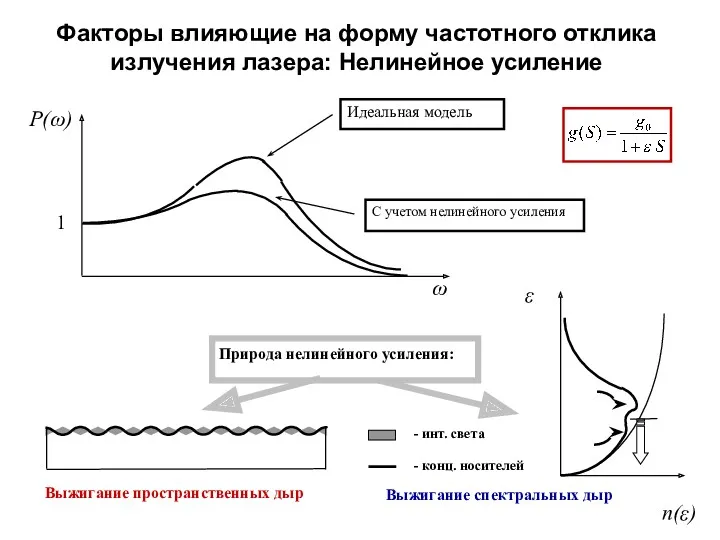 Факторы влияющие на форму частотного отклика излучения лазера: Нелинейное усиление
Факторы влияющие на форму частотного отклика излучения лазера: Нелинейное усиление Температура. Связь температуры со скоростью теплового движения частиц
Температура. Связь температуры со скоростью теплового движения частиц Формула Максвелла для относительных скоростей
Формула Максвелла для относительных скоростей Електричний струм у газах
Електричний струм у газах Основы расчетов движения автомобилей по дорогам
Основы расчетов движения автомобилей по дорогам Энергия. Виды энергии. Презентация
Энергия. Виды энергии. Презентация Methods and technical means for using the energy of waves
Methods and technical means for using the energy of waves Излучение и спектры
Излучение и спектры Рабочие процессы дизельного двигателя
Рабочие процессы дизельного двигателя Устройство и назначение автосцепки вагонов
Устройство и назначение автосцепки вагонов Управляемость и проходимость автомобиля. Характеристика и показатели траекторной управляемости
Управляемость и проходимость автомобиля. Характеристика и показатели траекторной управляемости Теплообменные аппараты
Теплообменные аппараты Техническая информация по коммерческим автомобилям NRW 2019. Двигатели
Техническая информация по коммерческим автомобилям NRW 2019. Двигатели Электрическое поле в вакууме. (Тема 13)
Электрическое поле в вакууме. (Тема 13) Механические характеристики производственных механизмов и электродвигателей
Механические характеристики производственных механизмов и электродвигателей Гипоидная передача
Гипоидная передача Курс Атомные реакторы и ядерная энергетика. Лекция 3. Ядерная энергетика. Настоящее и будущее
Курс Атомные реакторы и ядерная энергетика. Лекция 3. Ядерная энергетика. Настоящее и будущее Дифракционная решетка
Дифракционная решетка Опиливание металла напильником. Классификация напильников
Опиливание металла напильником. Классификация напильников Резонанс, его польза и вред
Резонанс, его польза и вред Поршни. Основные части днища
Поршни. Основные части днища Работа электрического поля. 10 класс
Работа электрического поля. 10 класс