- Основы расчетов движения автомобилей по дорогам

Содержание
- 2. Сопротивление движению автомобиля Силы сопротивления: - сопротивление движению на подъем Рi; - сила сопротивления движущемуся колесу
- 3. Сопротивление движению на подъем Для перемещения автомобиля по участку подъема длиной L на высоту h должна
- 4. Различают два вида трения - трение скольжения; - трение качения. Где N –модуль нормальной составляющей силы
- 5. Сопротивление воздуха состоит из : - лобового сопротивления; - трения воздуха о боковые поверхности автомобиля; -
- 6. Сопротивление инерционных сил автомобиля При массе автомобиля равной m=G/g и скорости v (м/с) инерционная сила поступательного
- 7. Динамические характеристики автомобиля где λ – коэффициент деформации шины (0,95÷0,93), ro – радиус колеса, rк –
- 8. Схема передачи вращающего момента двигателя на колеса автомобиля 1 – двигатель; 2 – маховик и сцепление;
- 9. Уравнение движения автомобиля Условие равенства внешних и внутренних сил где Рf ,Pi , Pw , Pj
- 10. Примеры динамических характеристик автомобилей
- 11. Сцепление шин с поверхностью дороги где – Pк max максимально допустимое без пробуксовывания тяговое усилие на
- 12. где m – масса автомобиля, кг; v – скорость автомобиля, м/с; R – радиус кривой, м;
- 13. При малых углах α (не более 10˚): соs α ≈1; sin α ≈ tg α ≈
- 14. Таблица 5.2 (СП 34.13330.2012) (6) Рекомендуемый радиус кривых в плане – это радиус, обеспечивающий удобное и
- 15. Назначение радиуса кривой в плане, исходя из обеспечения ночной видимости Длина дуги АВ = S. Угол,
- 16. (8)
- 17. Проектирование кривых в плане 5.7 Во всех случаях, когда смежные элементы плана трассы в месте их
- 18. Таблица 5.4 (СП 34.13330.2012) Продолжительность проезда по переходной кривой t, в течение которой центробежное ускорение возрастает
- 19. Наименьшие длины переходных кривых с линейным законом изменения кривизны (клотоид), сопрягающих прямые и кривые, в зависимости
- 20. Уширение проезжей части на кривых в плане Из подобия треугольников BCD и АВС следует:
- 21. Проектирование виражей Внешняя полоса Основные элементы виража: поперечный уклон односкатного профиля (уклон виража) iвир; длина отгона
- 22. 5.33 Односкатный поперечный профиль закругления (вираж) следует предусматривать при радиусах кривизны меньше, чем 3000 м для
- 23. Виды виражей Вираж 1-го типа iпоп=iвир Для перехода к односкатному профилю постепенно поворачивают внешнюю половину проезжей
- 25. Скачать презентацию
 Применение комплексных чисел к расчету электрических цепей переменного тока. Лекция 6
Применение комплексных чисел к расчету электрических цепей переменного тока. Лекция 6 Типовые соединения, применяемые в электроустановках. Методы и средства контроля размеров и качества сборки
Типовые соединения, применяемые в электроустановках. Методы и средства контроля размеров и качества сборки Звуковые волны
Звуковые волны Решение задач
Решение задач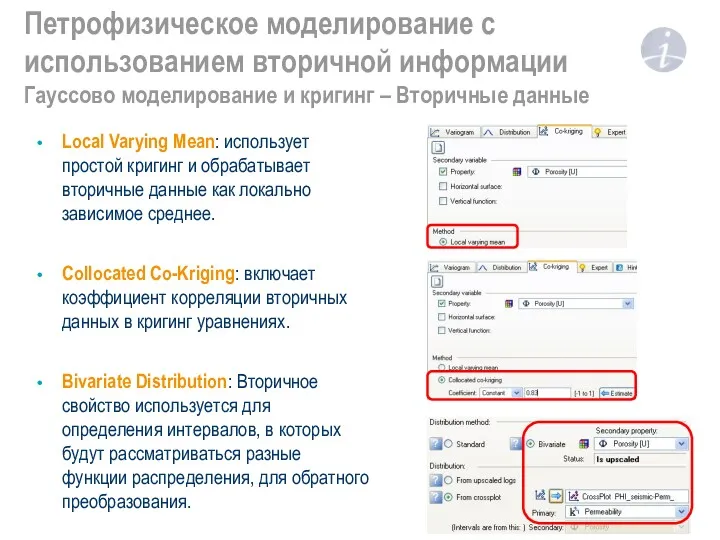 Петрофизическое моделирование с использованием вторичной информации. Гауссово моделирование и кригинг – Вторичные данные
Петрофизическое моделирование с использованием вторичной информации. Гауссово моделирование и кригинг – Вторичные данные Элективный курс Учимся мыслить 7-11 классы.
Элективный курс Учимся мыслить 7-11 классы. Электрический ток в вакууме. Электроннолучевая трубка
Электрический ток в вакууме. Электроннолучевая трубка Электростатика. Постоянный ток. (Лекция 4)
Электростатика. Постоянный ток. (Лекция 4) Электромагнитная индукция
Электромагнитная индукция Жылу алмасу үдерістері
Жылу алмасу үдерістері Инструменты. Правила безопасности
Инструменты. Правила безопасности Теория возраста. энергия нейтрона до и после рассеяния
Теория возраста. энергия нейтрона до и после рассеяния Механические свойства твердых тел и биологических тканей
Механические свойства твердых тел и биологических тканей Электропроводность кристаллов
Электропроводность кристаллов Обобщающий урок-игра по физике Один за всех, все за одного Правила игры Первый конкурс Второй конкурс Третий конкурс Четвертый конкурс Пятый конкурс Шестой конкурс Седьмой конкурс Восьмой конкурс Подведение итогов Источники
Обобщающий урок-игра по физике Один за всех, все за одного Правила игры Первый конкурс Второй конкурс Третий конкурс Четвертый конкурс Пятый конкурс Шестой конкурс Седьмой конкурс Восьмой конкурс Подведение итогов Источники Конденсаторы. 10 класс
Конденсаторы. 10 класс Современная микроскопия
Современная микроскопия Выступление Технология интерактивного обучения
Выступление Технология интерактивного обучения Использование сенсорных систем в мобильной робототехнике
Использование сенсорных систем в мобильной робототехнике Тепловые явления. Обобщающий урок (8 класс)
Тепловые явления. Обобщающий урок (8 класс) Сборка с базированием от внутренней поверхности
Сборка с базированием от внутренней поверхности Квантовые явления. Строение атома
Квантовые явления. Строение атома С Днём Победы! Шаблон для презентаций
С Днём Победы! Шаблон для презентаций Bernoulli’s equation
Bernoulli’s equation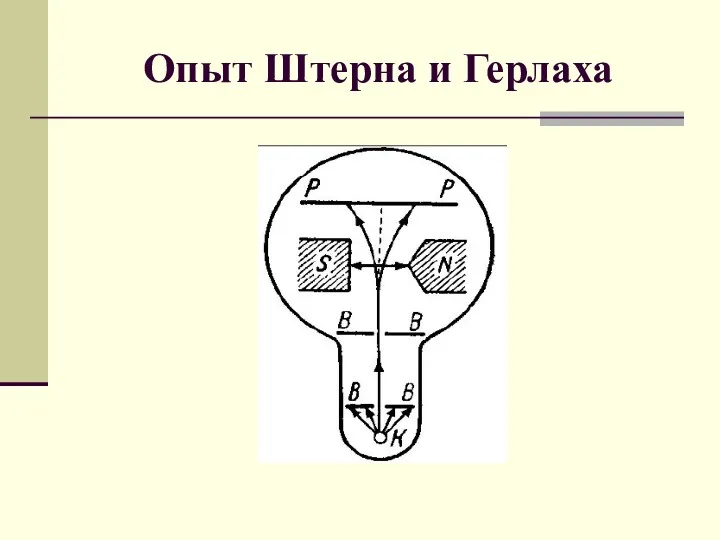 Опыт Штерна и Герлаха
Опыт Штерна и Герлаха Основные сведения о насосах
Основные сведения о насосах Основы радиопередачи и радиоприема
Основы радиопередачи и радиоприема Импульс тела
Импульс тела