- Механические характеристики производственных механизмов и электродвигателей

Содержание
- 2. Основные понятия. Моменты М (двигателя) и Мм (рабочей машины) могут зависеть от времени, от положения, от
- 3. Основные понятия. Поскольку как моменты, так и скорость могут иметь различные знаки, механические характеристики могут располагаться
- 4. Основные понятия. 2 1 6 5 3 4 +ω + А В С D E F
- 5. Основные понятия. Моменты, направленные по движению (движущие), имеют знак, совпадающий со знаком скорости; моменты, направленные против
- 6. Основные понятия. Моменты принято делить на активные и реактивные (пассивным). Активные моменты могут быть как движущими,
- 7. Основные понятия. Реактивные моменты - реакция на движение, они всегда направлены против движения, т.е. всегда тормозящие
- 8. Основные понятия. Механические характеристики принято оценивать их жесткостью 1 – характеристика абсолютно жесткая β=∞; 2 –
- 9. Основные понятия. Механические характеристики двигателя и нагрузки, рассматриваемые совместно, позволяют определить координаты - скорость и моменты
- 10. Механические характеристики производственных механизмов и их классификация В общем случае механические характеристики производственных механизмов можно описать
- 11. Механические характеристики производственных механизмов и их классификация Характеристики производственных механизмов подразделяют на четыре основные группы
- 12. Механические характеристики двигателей постоянного тока НВ. U=IR+E, E = СмФω ,
- 13. Механические характеристики двигателей постоянного тока НВ.
- 14. Механические характеристики двигателей постоянного тока НВ. Естественной характеристикой называется такая характеристика двигателя, которая получается при Отсутствии
- 15. Механические характеристики двигателей постоянного тока НВ. Координаты номинальной точки Координаты точки холостого хода
- 16. Механические характеристики двигателей постоянного тока НВ.
- 17. Механические характеристики двигателей постоянного тока НВ. М, Н·м ω, 1/с ω0 ωн ωн иск Мн
- 18. Электропривод. Часть 1 Механические характеристики двигателей постоянного тока НВ.
- 19. Механические характеристики двигателей постоянного тока НВ.
- 20. Механические характеристики двигателей постоянного тока НВ. Пределы регулирования составляю от 2:1 до 5:1, они и ограничиваются
- 21. Механические характеристики двигателей постоянного тока НВ.
- 22. Механические характеристики двигателей постоянного тока НВ. Пределы регулирования составляю от 6:1 до 8:1. Нижний предел регулирования
- 23. Механические характеристики двигателей постоянного тока НВ.
- 24. Расчет пускового реостата для ДПТ. Вывод формулы для определения сопротивления пускового реостата Для определения сопротивления ступеней
- 25. Расчет пускового реостата для ДПТ. Вывод формулы для определения сопротивления пускового реостата
- 26. Расчет пускового реостата для ДПТ. Вывод формулы для определения сопротивления пускового реостата
- 27. Расчет пускового реостата для ДПТ. Вывод формулы для определения сопротивления пускового реостата
- 28. Расчет пускового реостата для ДПТ. Вывод формулы для определения сопротивления пускового реостата Очевидно, что для следующих
- 29. Расчет пускового реостата для ДПТ. Вывод формулы для определения сопротивления пускового реостата Определим соотношения для определения
- 30. Расчет пускового реостата для ДПТ. Вывод формулы для определения сопротивления пускового реостата Если задан Iп макс,
- 32. Скачать презентацию
 Проводники и диэлектрики в электрическом поле
Проводники и диэлектрики в электрическом поле Постоянные магниты
Постоянные магниты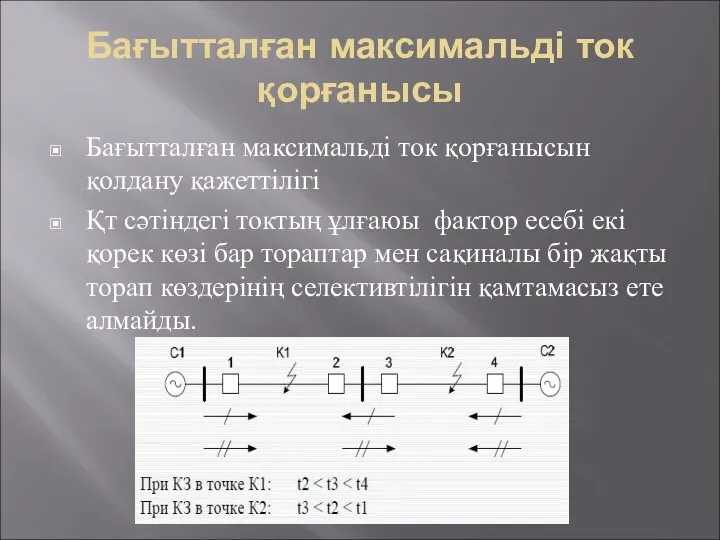 Бағытталған максимальді ток қорғанысы
Бағытталған максимальді ток қорғанысы Динамика. Законы Ньютона. 10 класс
Динамика. Законы Ньютона. 10 класс Электростатическое поле в вакууме
Электростатическое поле в вакууме История фрезерного станка
История фрезерного станка Основные зависимости для определения прочности конструкций
Основные зависимости для определения прочности конструкций Интеллектуальная игра Физбой по физике
Интеллектуальная игра Физбой по физике Измерение размеров малых тел. Лабораторная работа
Измерение размеров малых тел. Лабораторная работа Модульные технологии как технологии здоровьесбережения.
Модульные технологии как технологии здоровьесбережения. Закон Кулона
Закон Кулона Программа элективного курса по физике 9 класс
Программа элективного курса по физике 9 класс Электромагнитное поле. Электромагнитные волны
Электромагнитное поле. Электромагнитные волны Строительная механика. Расчёт трёхшарнирных систем внутренние силовые факторы. Линии влияния усилий
Строительная механика. Расчёт трёхшарнирных систем внутренние силовые факторы. Линии влияния усилий Урок по физике 7 класс Мощность
Урок по физике 7 класс Мощность Интерференция света
Интерференция света Электроемкость. Конденсаторы. Энергия заряженного конденсатора
Электроемкость. Конденсаторы. Энергия заряженного конденсатора Урок физики в 7 классе Тема: Градуирование пружины и измерение сил динамометром.
Урок физики в 7 классе Тема: Градуирование пружины и измерение сил динамометром. радиоактивность
радиоактивность Электрический ток в вакууме
Электрический ток в вакууме Технологические методы ремонта (восстановления) деталей машин, упрочнения и повышения их износостойкости при ремонте
Технологические методы ремонта (восстановления) деталей машин, упрочнения и повышения их износостойкости при ремонте Механические колебания
Механические колебания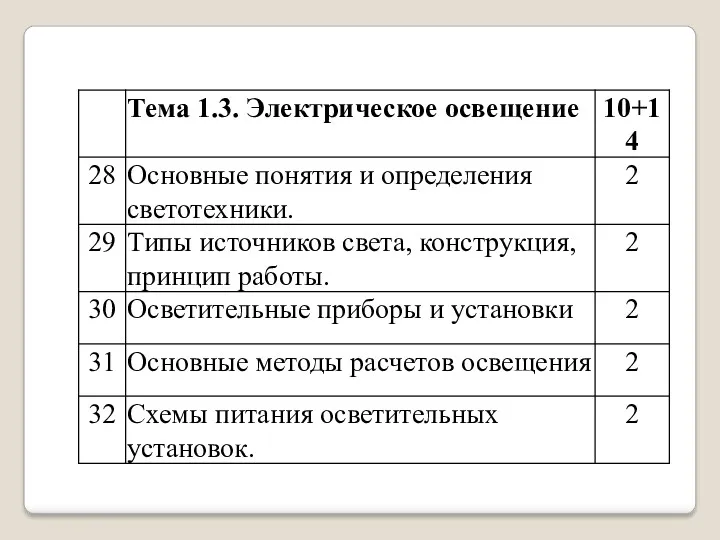 Электрическое освещение. Лекция 3
Электрическое освещение. Лекция 3 Оборудование для созревания мяса. Лекция 5
Оборудование для созревания мяса. Лекция 5 Планетарная модель атома. Постулаты Бора. Спектры
Планетарная модель атома. Постулаты Бора. Спектры Постоянный электрический ток
Постоянный электрический ток спектры
спектры Лазер сәулелерінің биологиялық әсер етуінің механизмдері
Лазер сәулелерінің биологиялық әсер етуінің механизмдері