- Кинематический анализ механизмов

Содержание
- 2. Лекция 2 - Кинематический анализ механизмов КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ Кинематический анализ механизма — определение движения звеньев
- 3. Лекция 2 - Кинематический анализ механизмов Методы кинематического анализа графоаналитические (метод планов скоростей и ускорений, численные
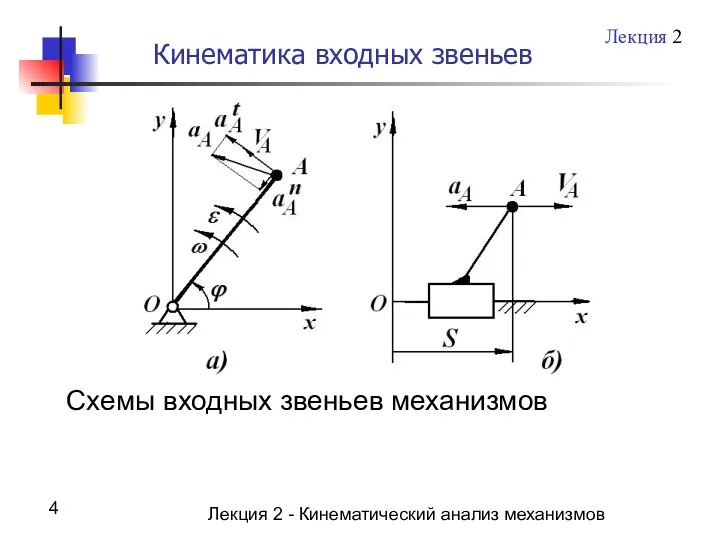
- 4. Лекция 2 - Кинематический анализ механизмов Кинематика входных звеньев Схемы входных звеньев механизмов Лекция 2
- 5. Лекция 2 - Кинематический анализ механизмов Кинематика входных звеньев Если законы движения входных звеньев заданы в
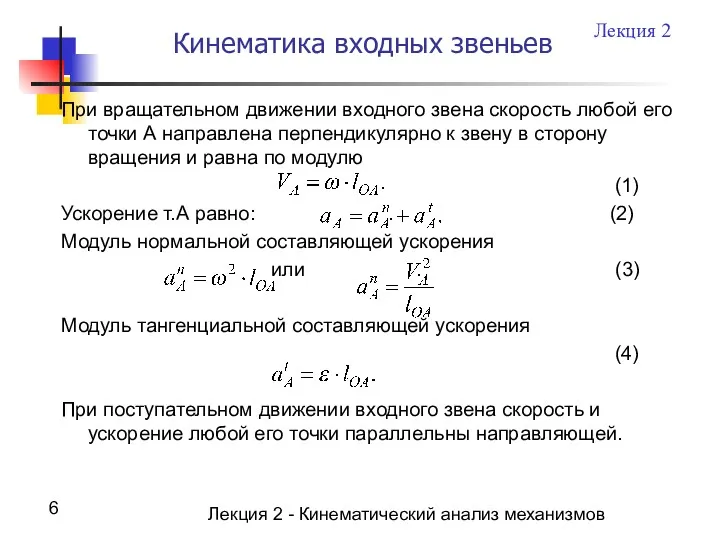
- 6. Лекция 2 - Кинематический анализ механизмов Кинематика входных звеньев При вращательном движении входного звена скорость любой
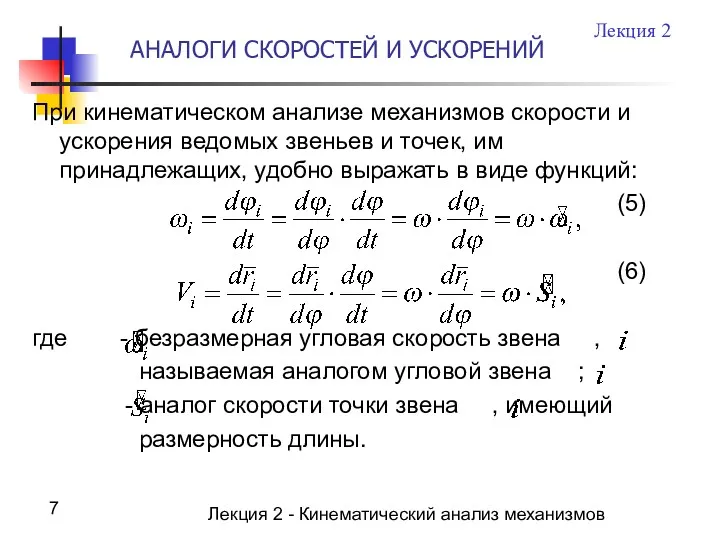
- 7. Лекция 2 - Кинематический анализ механизмов АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ При кинематическом анализе механизмов скорости и
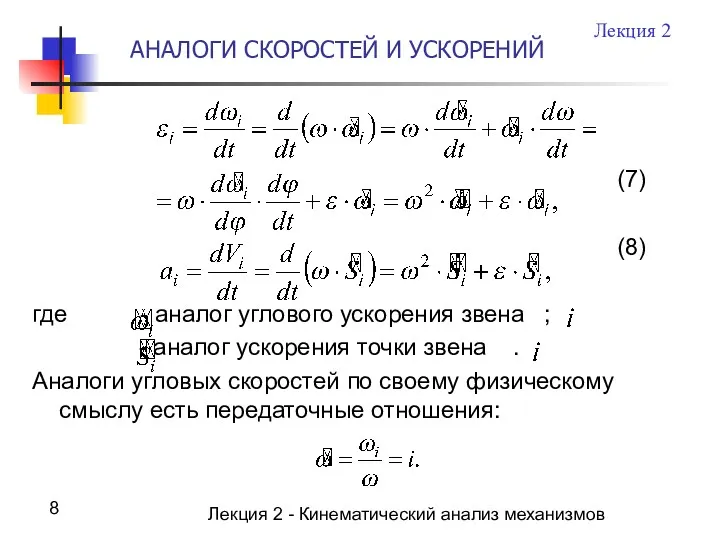
- 8. Лекция 2 - Кинематический анализ механизмов АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ (7) (8) где - аналог углового
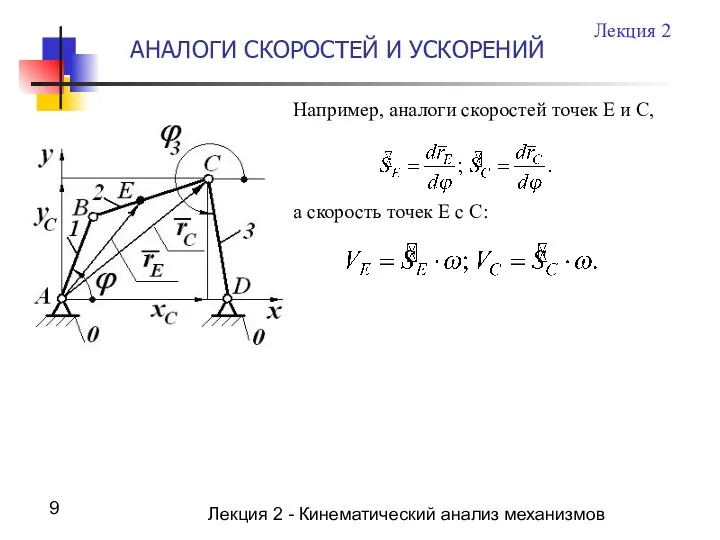
- 9. Лекция 2 - Кинематический анализ механизмов АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ Лекция 2 Например, аналоги скоростей точек
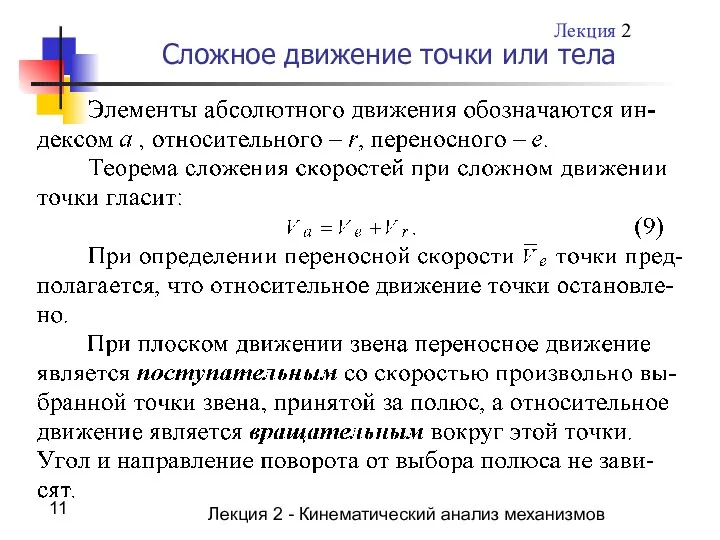
- 10. Лекция 2 - Кинематический анализ механизмов Сложное движение точки или тела При сложном движении точки или
- 11. Лекция 2 - Кинематический анализ механизмов Сложное движение точки или тела Лекция 2
- 12. Лекция 2 - Кинематический анализ механизмов Сложное движение точки или тела Лекция 2
- 13. Лекция 2 - Кинематический анализ механизмов Сложное движение точки или тела Лекция 2
- 14. Лекция 2 - Кинематический анализ механизмов Графические методы Изображение кинематической схемы механизма в выбранном масштабе ,
- 15. Лекция 2 - Кинематический анализ механизмов План шестизвенного механизма Масштаб построения: где АВ – заданная длина
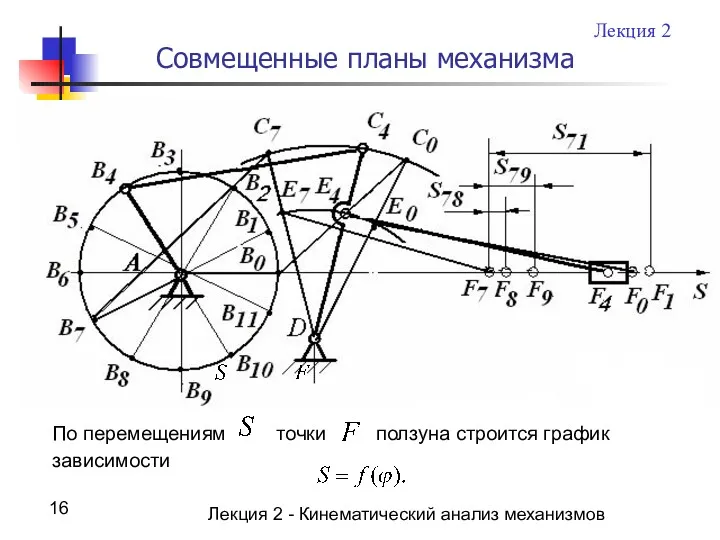
- 16. Лекция 2 - Кинематический анализ механизмов Совмещенные планы механизма По перемещениям точки ползуна строится график зависимости
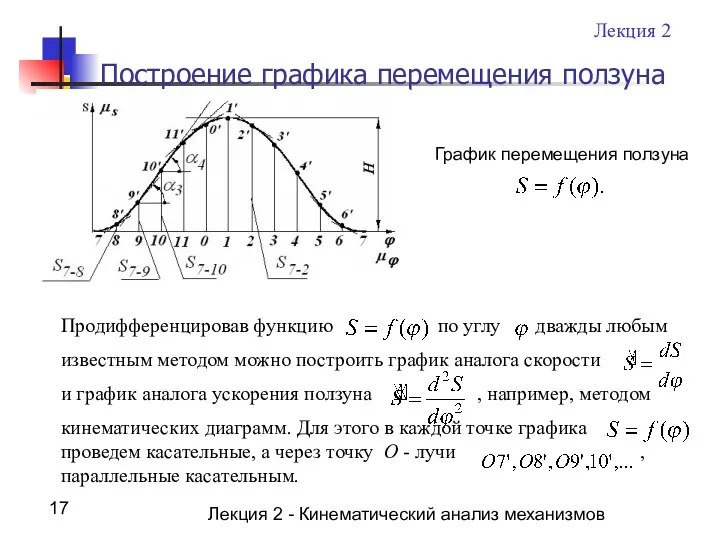
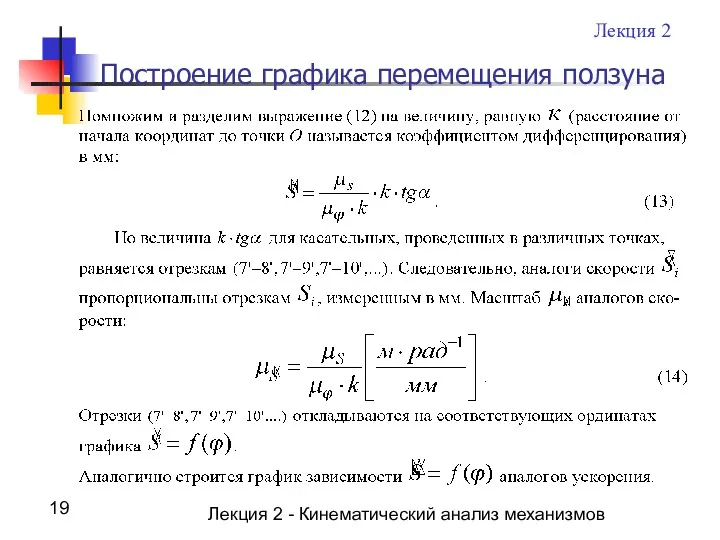
- 17. Лекция 2 - Кинематический анализ механизмов Построение графика перемещения ползуна График перемещения ползуна Продифференцировав функцию по
- 18. Лекция 2 - Кинематический анализ механизмов Построение графика перемещения ползуна Лекция 2
- 19. Лекция 2 - Кинематический анализ механизмов Построение графика перемещения ползуна Лекция 2
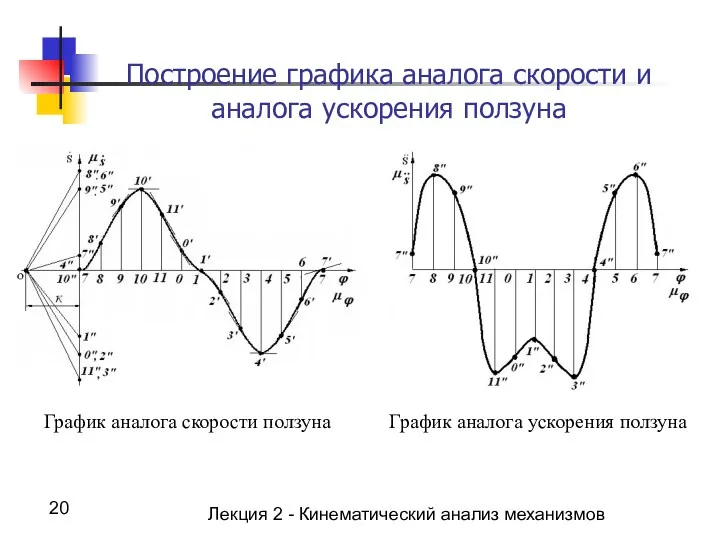
- 20. Лекция 2 - Кинематический анализ механизмов Построение графика аналога скорости и аналога ускорения ползуна График аналога
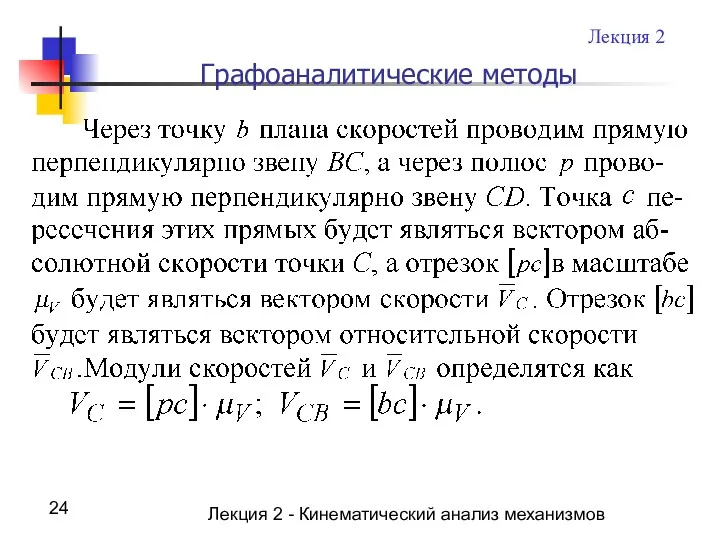
- 21. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы Планом скоростей (ускорений) механизма называется чертеж, на котором
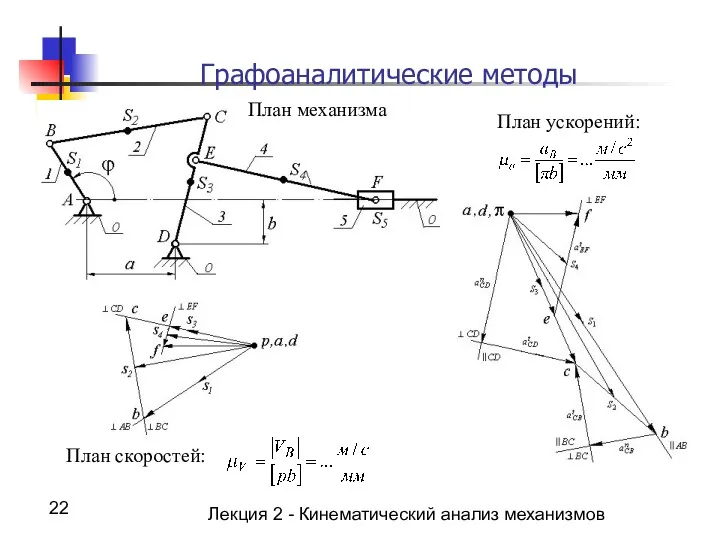
- 22. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы . План скоростей: План ускорений: План механизма
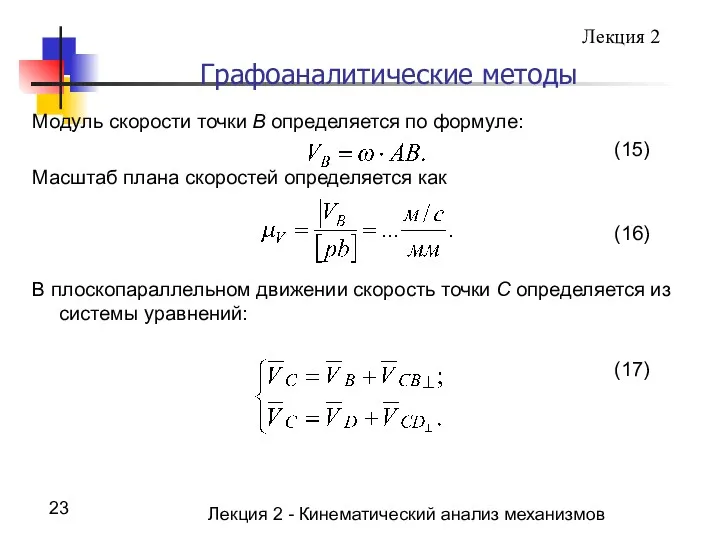
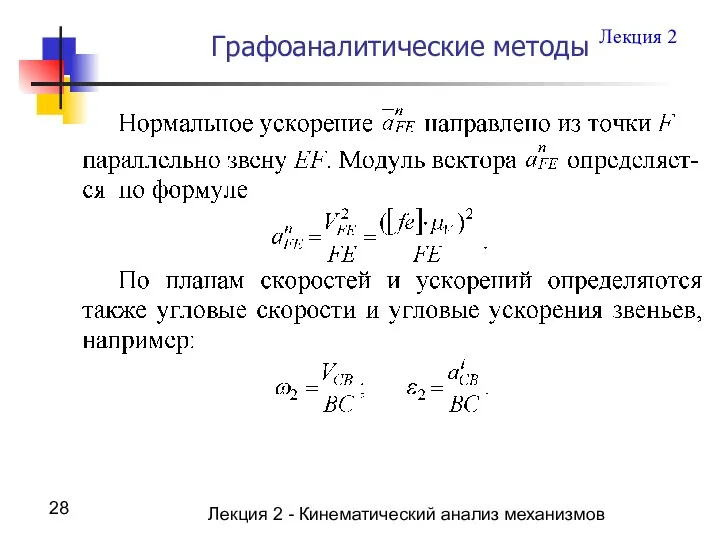
- 23. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы Модуль скорости точки В определяется по формуле: (15)
- 24. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы Лекция 2
- 25. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы Лекция 2
- 26. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы Лекция 2
- 27. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы Лекция 2
- 28. Лекция 2 - Кинематический анализ механизмов Графоаналитические методы Лекция 2
- 29. Лекция 2 - Кинематический анализ механизмов Аналитические методы Аналитические методы основаны на том, что кинематическую схему
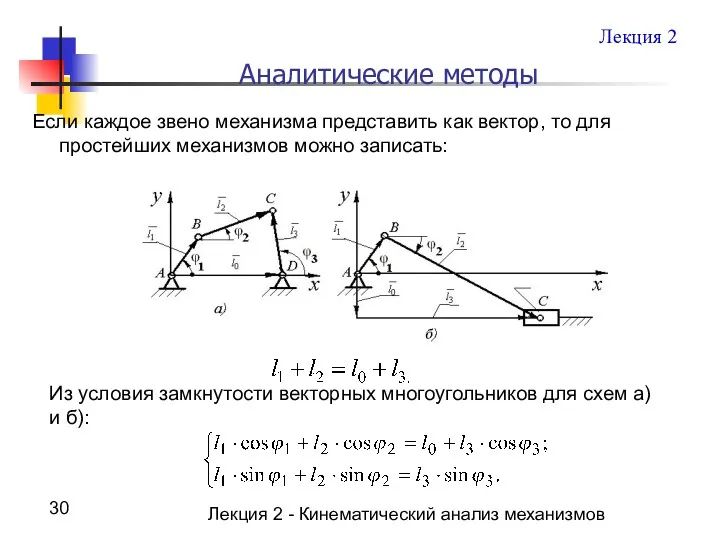
- 30. Лекция 2 - Кинематический анализ механизмов Аналитические методы Если каждое звено механизма представить как вектор, то
- 32. Скачать презентацию

Лекция 2 - Кинематический анализ механизмов
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Кинематический анализ механизма —
Лекция 2 - Кинематический анализ механизмов
КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Кинематический анализ механизма —
Лекция 2 - Кинематический анализ механизмов
Методы кинематического анализа
графоаналитические (метод планов
Лекция 2 - Кинематический анализ механизмов
Методы кинематического анализа
графоаналитические (метод планов
Лекция 2 - Кинематический анализ механизмов
Кинематика входных звеньев
Схемы входных звеньев
Лекция 2 - Кинематический анализ механизмов
Кинематика входных звеньев
Схемы входных звеньев
Лекция 2 - Кинематический анализ механизмов
Кинематика входных звеньев
Если законы движения
Лекция 2 - Кинематический анализ механизмов
Кинематика входных звеньев
Если законы движения
Лекция 2 - Кинематический анализ механизмов
Кинематика входных звеньев
При вращательном движении
Лекция 2 - Кинематический анализ механизмов
Кинематика входных звеньев
При вращательном движении
Лекция 2 - Кинематический анализ механизмов
АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ
При кинематическом
Лекция 2 - Кинематический анализ механизмов
АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ
При кинематическом
Лекция 2 - Кинематический анализ механизмов
АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ
(7)
Лекция 2 - Кинематический анализ механизмов
АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ
(7)
Лекция 2 - Кинематический анализ механизмов
АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ
Лекция 2
Например,
Лекция 2 - Кинематический анализ механизмов
АНАЛОГИ СКОРОСТЕЙ И УСКОРЕНИЙ
Лекция 2
Например,
Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
При сложном
Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
При сложном
Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
Лекция 2

Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
Лекция 2

Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Сложное движение точки или тела
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графические методы
Изображение кинематической схемы механизма в
Лекция 2 - Кинематический анализ механизмов
Графические методы
Изображение кинематической схемы механизма в

Лекция 2 - Кинематический анализ механизмов
План шестизвенного механизма
Масштаб построения:
где АВ
Лекция 2 - Кинематический анализ механизмов
План шестизвенного механизма
Масштаб построения:
где АВ
Лекция 2 - Кинематический анализ механизмов
Совмещенные планы механизма
По перемещениям точки ползуна
Лекция 2 - Кинематический анализ механизмов
Совмещенные планы механизма
По перемещениям точки ползуна
Лекция 2 - Кинематический анализ механизмов
Построение графика перемещения ползуна
График перемещения ползуна
Лекция 2 - Кинематический анализ механизмов
Построение графика перемещения ползуна
График перемещения ползуна

Лекция 2 - Кинематический анализ механизмов
Построение графика перемещения ползуна
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Построение графика перемещения ползуна
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Построение графика перемещения ползуна
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Построение графика перемещения ползуна
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Построение графика аналога скорости и
аналога ускорения
Лекция 2 - Кинематический анализ механизмов
Построение графика аналога скорости и аналога ускорения
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Планом скоростей (ускорений) механизма называется
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Планом скоростей (ускорений) механизма называется
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
.
План скоростей:
План ускорений:
План механизма
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
.
План скоростей:
План ускорений:
План механизма
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Модуль скорости точки В определяется
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Модуль скорости точки В определяется
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2

Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Графоаналитические методы
Лекция 2
Лекция 2 - Кинематический анализ механизмов
Аналитические методы
Аналитические методы основаны на том,
Лекция 2 - Кинематический анализ механизмов
Аналитические методы
Аналитические методы основаны на том,
Лекция 2 - Кинематический анализ механизмов
Аналитические методы
Если каждое звено механизма представить
Лекция 2 - Кинематический анализ механизмов
Аналитические методы
Если каждое звено механизма представить
 Экологическое образование в процессе обучения физике
Экологическое образование в процессе обучения физике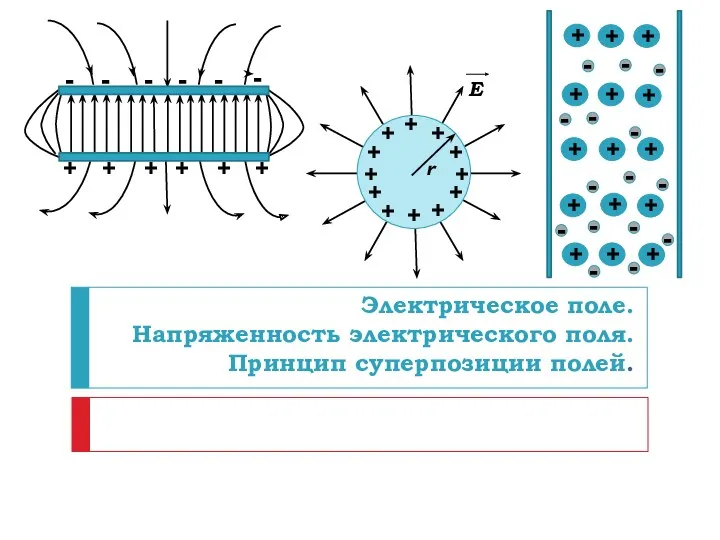 Электрическое поле. Напряженность электрического поля. Принцип суперпозиции полей
Электрическое поле. Напряженность электрического поля. Принцип суперпозиции полей Динамика твердого тела. Лекция 5: Плоское движение твердого тела
Динамика твердого тела. Лекция 5: Плоское движение твердого тела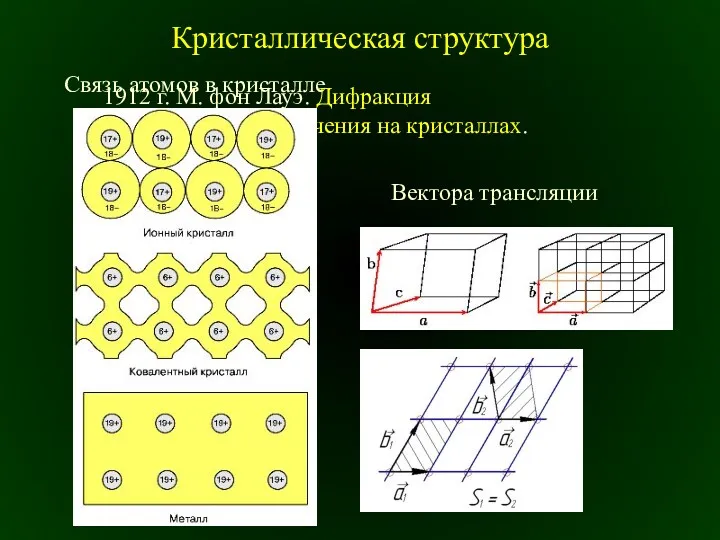 Кристаллическая структура
Кристаллическая структура Фізика в житті сучасної людини
Фізика в житті сучасної людини Mass spectrometry
Mass spectrometry Урок- игра по теме Масса вещества.Плотность
Урок- игра по теме Масса вещества.Плотность Сила упругости 7 класс, презентация
Сила упругости 7 класс, презентация Физико–химические свойства нефти, нефтепродуктов. Качество нефти и нефтепродуктов. Методы их анализа
Физико–химические свойства нефти, нефтепродуктов. Качество нефти и нефтепродуктов. Методы их анализа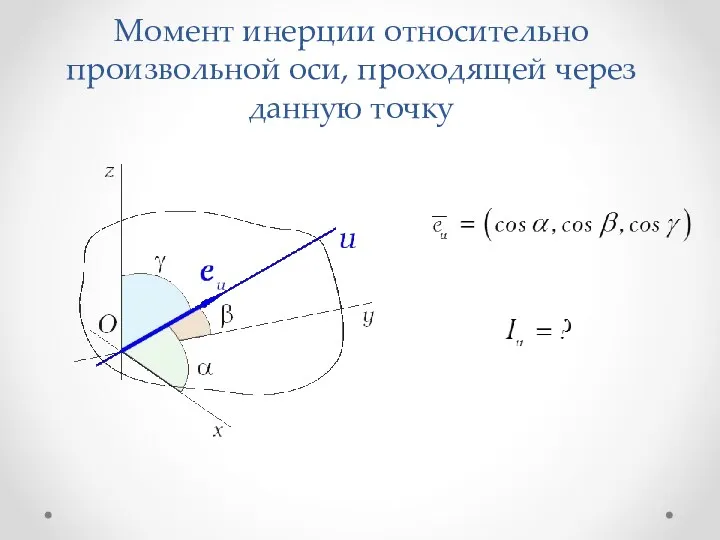 Момент инерции относительно произвольной оси, проходящей через данную точку. (Лекция 5)
Момент инерции относительно произвольной оси, проходящей через данную точку. (Лекция 5) Репортаж с фестиваля наук. Экспериментальная площадка Метеорологическая лаборатория
Репортаж с фестиваля наук. Экспериментальная площадка Метеорологическая лаборатория Формирование исследовательских умений школьников
Формирование исследовательских умений школьников Реактивное движение
Реактивное движение Излучение и спектры
Излучение и спектры Energy and power, solar astronomy. (Lecture 4)
Energy and power, solar astronomy. (Lecture 4) Физика в белом халате
Физика в белом халате Механическое движение
Механическое движение Unusual modes pf transport
Unusual modes pf transport Структура пограничного слоя при продольном обтекании сотовой поверхности
Структура пограничного слоя при продольном обтекании сотовой поверхности Металлический водород
Металлический водород Основные узлы станка
Основные узлы станка Закон радиоактивного распада
Закон радиоактивного распада Озоновый слой атмосферы. Ультрафиолетовое излучение
Озоновый слой атмосферы. Ультрафиолетовое излучение Механическое оборудование и система вентиляции
Механическое оборудование и система вентиляции Спектры и спектральные аппараты. Виды спектров. Спектральный анализ
Спектры и спектральные аппараты. Виды спектров. Спектральный анализ Радиолокация
Радиолокация Паровая машина Ползунова
Паровая машина Ползунова Скорость света
Скорость света