- Кинематический анализ плоского механизма. (Задача к-11)

Содержание
- 2. Оформление. Чувашский государственный университет им. И.Н.Ульянова Факультет энергетики и электротехники Кафедра высшей математики и теоретической механики
- 3. Расчетно-графическая работа №1 по теме: «Кинематический анализ плоских механизмов» Рис. 3, вариант 11
- 4. Выполнил: студент группы ФЭиЭТ-…-15 Фамилия И.О. Проверила: Васильева Е.В. Чебоксары - 2016
- 5. Дано:
- 6. Найти: Скорости точек A, B, C, D. Угловые скорости стержня АВ и колеса в заданном положении.
- 7. Заданный рисунок
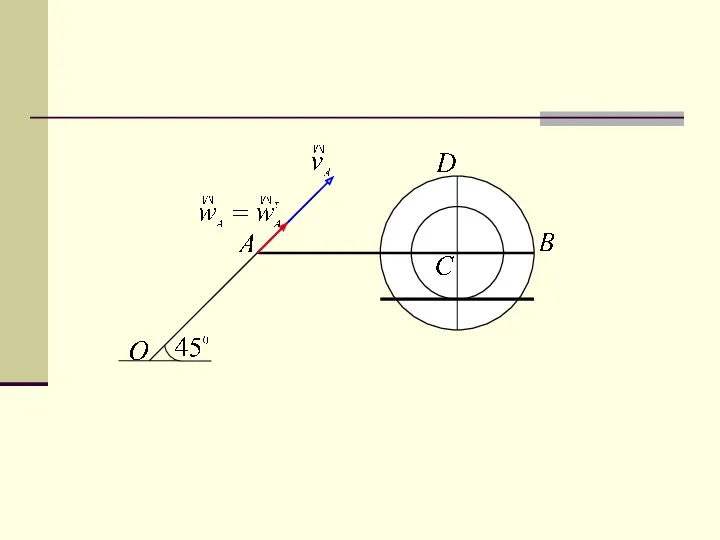
- 8. Рисунок с учетом данных
- 9. Решение: Рассмотрим движение точки А. По условию задачи т.А движется по прямой ОА по закону ,
- 10. Для того чтобы определить скорость и ускорение т.А, найдем время , когда расстояние, пройденное точкой станет
- 11. Получим: . Определим скорость и ускорение:
- 12. При получим: , т.е. направление вектора скорости т.А совпадает с положительным направлением движения. , т.е. направление
- 13. Тогда полное ускорение: , совпадает по направлению и по длине с вектором касательного ускорения т.А. Изобразим
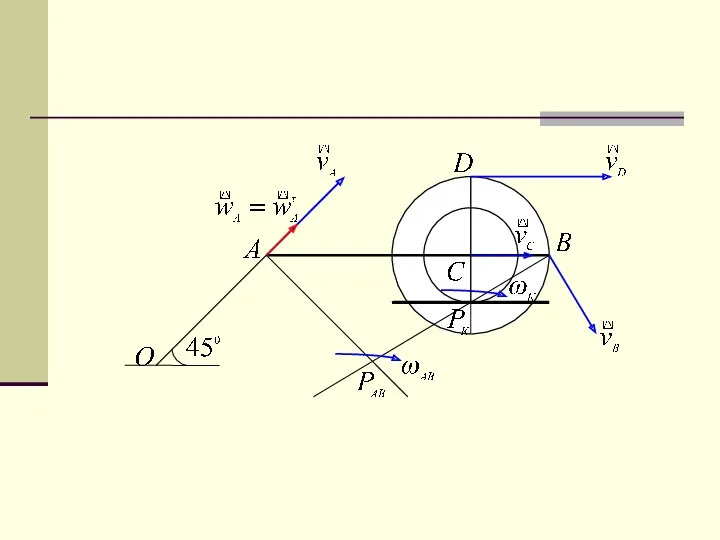
- 15. 2. Рассмотрим движение стержня АВ. Стержень совершает ППД. Тогда для определения скоростей его точек определим мцс
- 16. 3. Рассмотрим движение колеса. Оно совершает ППД. Положение мцс колеса известно – т. . Тогда можем
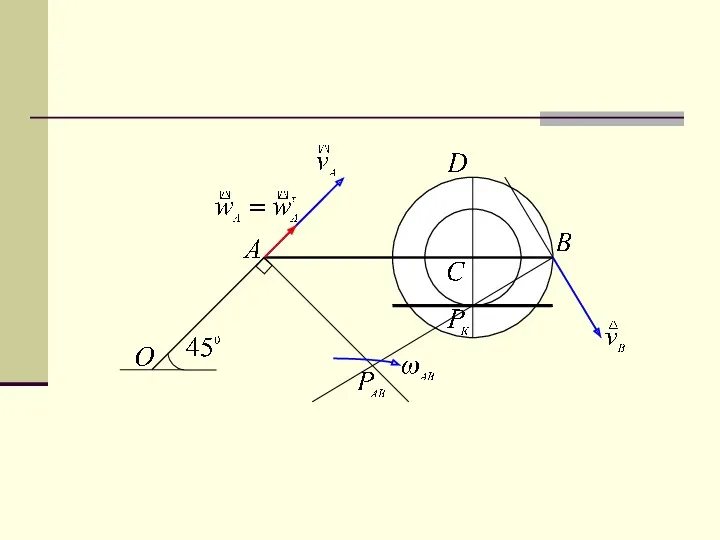
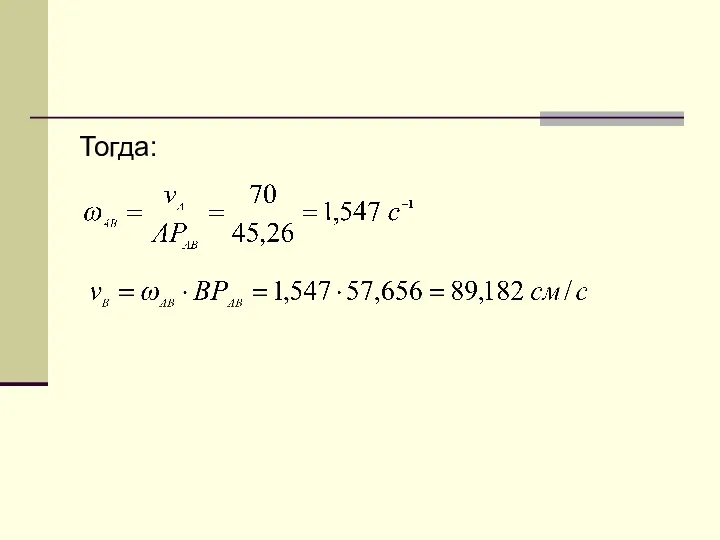
- 18. Возвращаемся к пункту 2. Т.к. известно положение прямой, на которой находится вектор скорости т.В, то можем
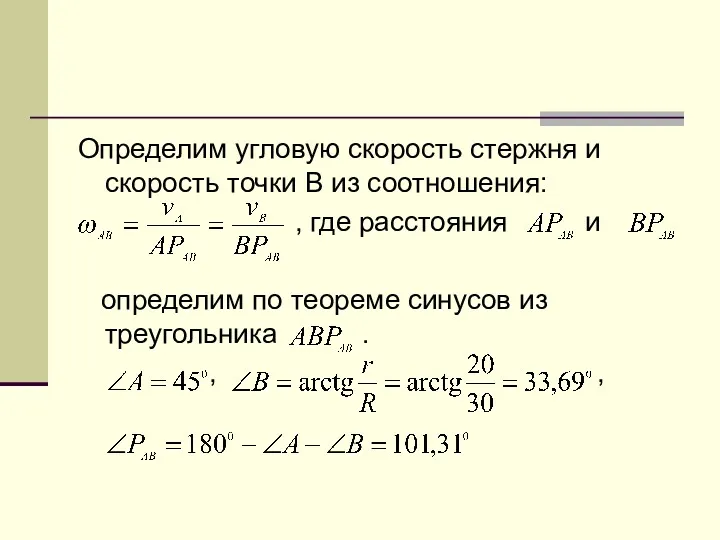
- 20. Определим угловую скорость стержня и скорость точки В из соотношения: , где расстояния и определим по
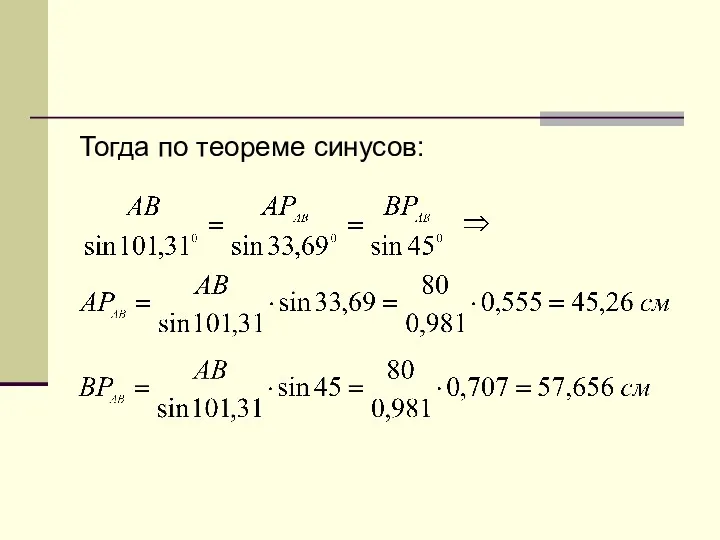
- 21. Тогда по теореме синусов:
- 22. Тогда:
- 23. Переходим к 3 пункту. Зная направление скорости т.В, можем определить угловую скорость колеса, направления скоростей точек
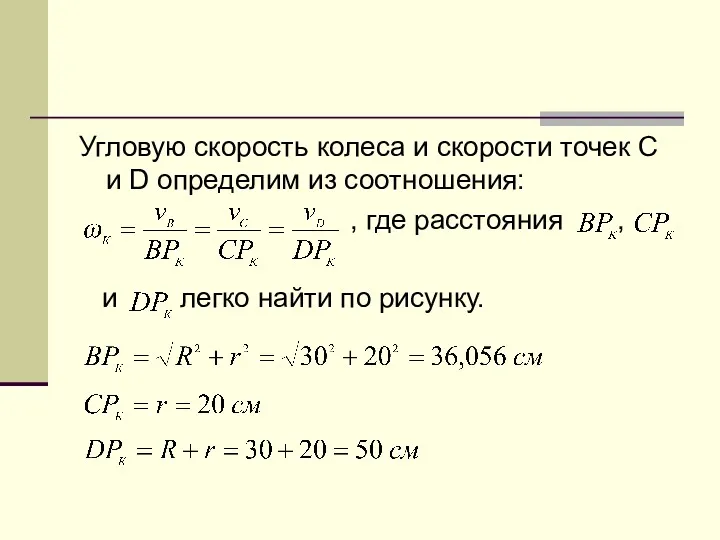
- 25. Угловую скорость колеса и скорости точек С и D определим из соотношения: , где расстояния ,
- 27. Скачать презентацию
Оформление.
Чувашский государственный университет
им. И.Н.Ульянова
Факультет энергетики и электротехники
Кафедра высшей математики и
Оформление.
Чувашский государственный университет
им. И.Н.Ульянова
Факультет энергетики и электротехники
Кафедра высшей математики и
Расчетно-графическая работа №1
по теме:
«Кинематический анализ
плоских механизмов»
Рис. 3, вариант 11
по теме:
«Кинематический анализ
плоских механизмов»
Рис. 3, вариант 11
Выполнил:
студент группы ФЭиЭТ-…-15
Фамилия И.О.
Проверила:
Васильева Е.В.
Чебоксары - 2016
Выполнил:
студент группы ФЭиЭТ-…-15
Фамилия И.О.
Проверила:
Васильева Е.В.
Чебоксары - 2016
Дано:
Дано:
Найти:
Скорости точек A, B, C, D.
Угловые скорости стержня АВ и колеса
Найти:
Скорости точек A, B, C, D.
Угловые скорости стержня АВ и колеса
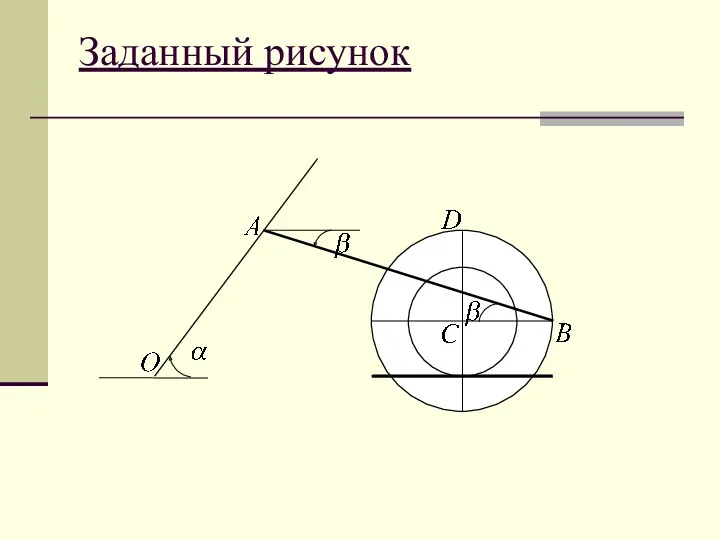
Заданный рисунок
Заданный рисунок
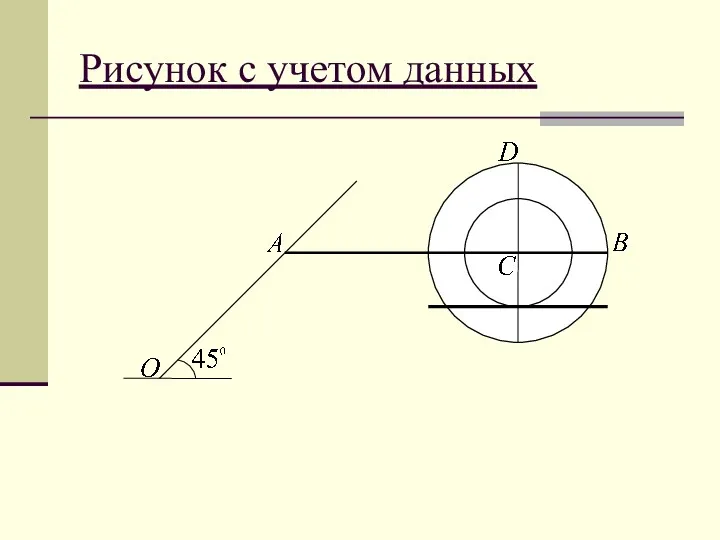
Рисунок с учетом данных
Рисунок с учетом данных
Решение:
Рассмотрим движение точки А.
По условию задачи т.А движется по прямой ОА
Решение:
Рассмотрим движение точки А.
По условию задачи т.А движется по прямой ОА
Для того чтобы определить скорость и ускорение т.А, найдем время ,
Для того чтобы определить скорость и ускорение т.А, найдем время ,
Получим: .
Определим скорость и ускорение:
Получим: .
Определим скорость и ускорение:
При получим:
, т.е. направление вектора скорости т.А совпадает с положительным
При получим:
, т.е. направление вектора скорости т.А совпадает с положительным
Тогда полное ускорение:
, совпадает по направлению и по длине
Тогда полное ускорение:
, совпадает по направлению и по длине
2. Рассмотрим движение стержня АВ.
Стержень совершает ППД. Тогда для определения скоростей
2. Рассмотрим движение стержня АВ.
Стержень совершает ППД. Тогда для определения скоростей
3. Рассмотрим движение колеса.
Оно совершает ППД. Положение мцс колеса известно –
3. Рассмотрим движение колеса.
Оно совершает ППД. Положение мцс колеса известно –
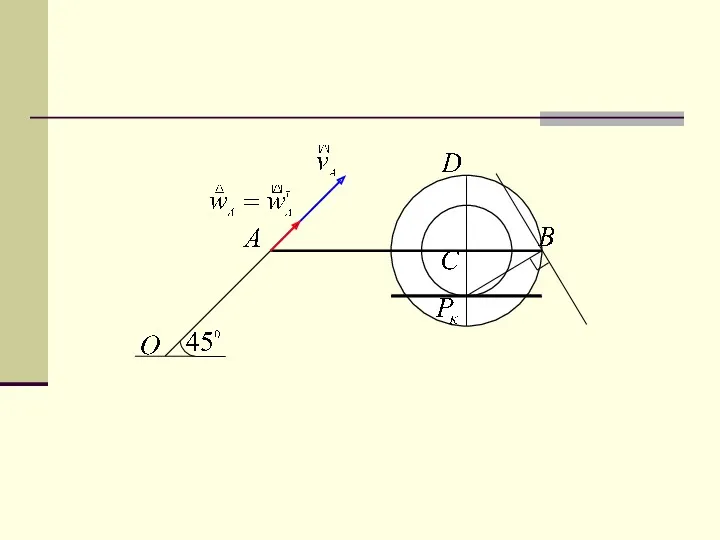
Возвращаемся к пункту 2.
Т.к. известно положение прямой, на которой находится
Возвращаемся к пункту 2.
Т.к. известно положение прямой, на которой находится
Определим угловую скорость стержня и скорость точки В из соотношения:
,
Определим угловую скорость стержня и скорость точки В из соотношения:
,
Тогда по теореме синусов:
Тогда по теореме синусов:
Тогда:
Тогда:
Переходим к 3 пункту.
Зная направление скорости т.В, можем определить угловую скорость
Переходим к 3 пункту.
Зная направление скорости т.В, можем определить угловую скорость
Угловую скорость колеса и скорости точек С и D определим из
Угловую скорость колеса и скорости точек С и D определим из
 Презентация по Физики 7 класс На тему Механическая работа и мощность.
Презентация по Физики 7 класс На тему Механическая работа и мощность. презентация к уроку плотность вещества
презентация к уроку плотность вещества Построение и применение комплексов радиорелейной, тропосферной, спутниковой связи
Построение и применение комплексов радиорелейной, тропосферной, спутниковой связи Презентация к уроку Виды сил. Равнодействующая сила. Правила сложения сил для 7 класса
Презентация к уроку Виды сил. Равнодействующая сила. Правила сложения сил для 7 класса Оборудование для смазочно-заправочных работ. Техническое обслуживание и ремонт автомобилей
Оборудование для смазочно-заправочных работ. Техническое обслуживание и ремонт автомобилей Устройство и назначение карданной передачи в автомобиле
Устройство и назначение карданной передачи в автомобиле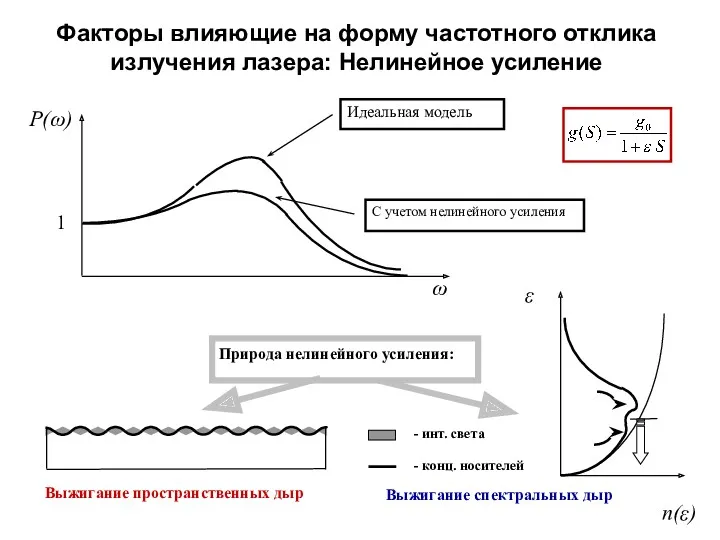 Факторы влияющие на форму частотного отклика излучения лазера: Нелинейное усиление
Факторы влияющие на форму частотного отклика излучения лазера: Нелинейное усиление Температура. Связь температуры со скоростью теплового движения частиц
Температура. Связь температуры со скоростью теплового движения частиц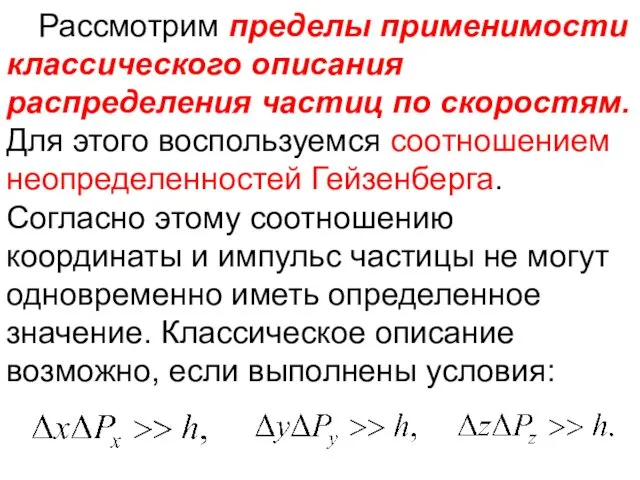 Формула Максвелла для относительных скоростей
Формула Максвелла для относительных скоростей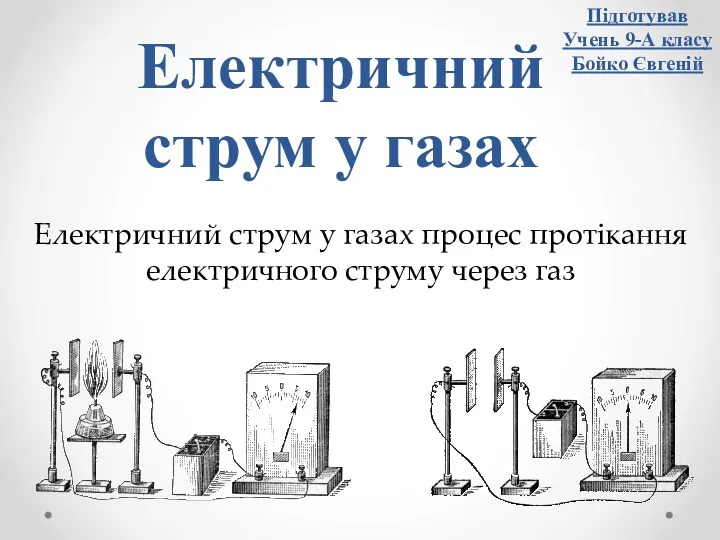 Електричний струм у газах
Електричний струм у газах Основы расчетов движения автомобилей по дорогам
Основы расчетов движения автомобилей по дорогам Энергия. Виды энергии. Презентация
Энергия. Виды энергии. Презентация Methods and technical means for using the energy of waves
Methods and technical means for using the energy of waves Излучение и спектры
Излучение и спектры Рабочие процессы дизельного двигателя
Рабочие процессы дизельного двигателя Устройство и назначение автосцепки вагонов
Устройство и назначение автосцепки вагонов Управляемость и проходимость автомобиля. Характеристика и показатели траекторной управляемости
Управляемость и проходимость автомобиля. Характеристика и показатели траекторной управляемости Теплообменные аппараты
Теплообменные аппараты Техническая информация по коммерческим автомобилям NRW 2019. Двигатели
Техническая информация по коммерческим автомобилям NRW 2019. Двигатели Электрическое поле в вакууме. (Тема 13)
Электрическое поле в вакууме. (Тема 13) Механические характеристики производственных механизмов и электродвигателей
Механические характеристики производственных механизмов и электродвигателей Гипоидная передача
Гипоидная передача Курс Атомные реакторы и ядерная энергетика. Лекция 3. Ядерная энергетика. Настоящее и будущее
Курс Атомные реакторы и ядерная энергетика. Лекция 3. Ядерная энергетика. Настоящее и будущее Дифракционная решетка
Дифракционная решетка Опиливание металла напильником. Классификация напильников
Опиливание металла напильником. Классификация напильников Резонанс, его польза и вред
Резонанс, его польза и вред Поршни. Основные части днища
Поршни. Основные части днища Работа электрического поля. 10 класс
Работа электрического поля. 10 класс