- Кинематический анализ рычажных механизмов

Содержание
- 2. Аналитический метод кинематического анализа рычажных механизмов Наиболее распространенным методом является метод замкнутых векторных контуров. Для его
- 3. Векторное уравнение замкнутого треугольника имеет вид (2.2) Спроектируем векторное уравнение на оси координат х и у
- 4. Определение скоростей и ускорений звеньев кривошипно-ползунного механизма Для определения скоростей звеньев 2 и 3 продифференцируем систему
- 5. Определение закона движения центра тяжести звена 2 (т. ) Для определения закона движения центра тяжести звена
- 6. Кинематические характеристики звена 2
- 7. Кинематические характеристики звена 2
- 8. Кинематический анализ механизма с гидроцилиндром аналитическим методом Постановка задачи Кинематическая схема механизма приведена на рис. 2.7.
- 9. Определение кинематических параметров звеньев механизма с гидроцилиндром Векторное уравнение замкнутости контура АВС имеет вид Проекции векторного
- 10. Кинематические характеристики звеньев механизма с гидроцилиндром
- 11. Графоаналитический метод кинематического анализа рычажных механизмов Графоаналитический метод определения кинематических параметров механизмов сводится к построению планов
- 12. Построение плана скоростей кривошипно-ползунных механизмов Для построения плана скоростей должна быть известна кинематическая схема механизма, построенная
- 14. Скачать презентацию
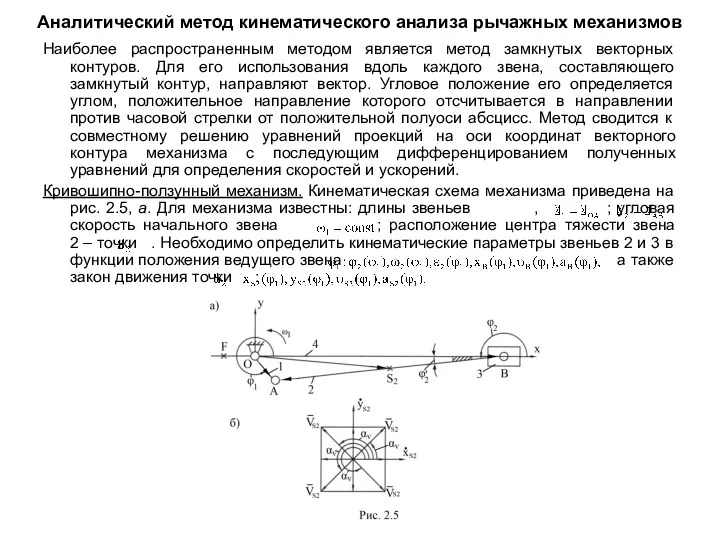
Аналитический метод кинематического анализа рычажных механизмов
Наиболее распространенным методом является метод замкнутых
Аналитический метод кинематического анализа рычажных механизмов
Наиболее распространенным методом является метод замкнутых

Векторное уравнение замкнутого треугольника имеет вид
(2.2)
Спроектируем векторное уравнение на
Векторное уравнение замкнутого треугольника имеет вид
(2.2)
Спроектируем векторное уравнение на

Определение скоростей и ускорений звеньев кривошипно-ползунного механизма
Для определения скоростей звеньев 2
Определение скоростей и ускорений звеньев кривошипно-ползунного механизма
Для определения скоростей звеньев 2

Определение закона движения центра тяжести звена 2 (т. )
Для определения закона
Определение закона движения центра тяжести звена 2 (т. )
Для определения закона

Кинематические характеристики звена 2
Кинематические характеристики звена 2

Кинематические характеристики звена 2
Кинематические характеристики звена 2
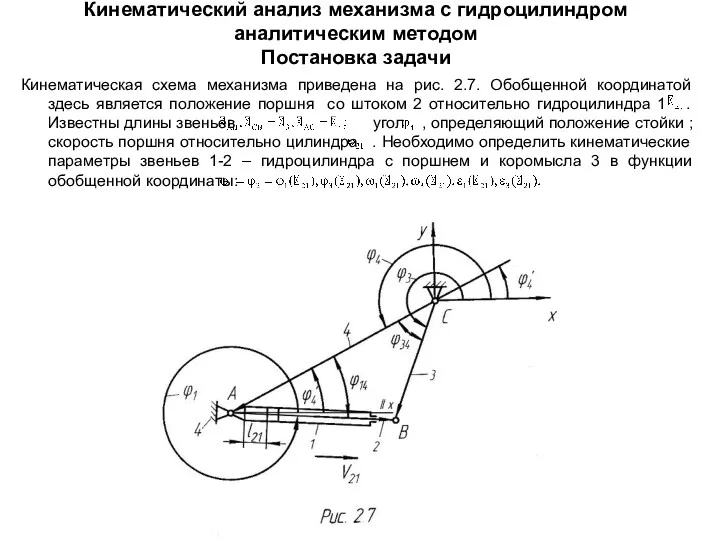
Кинематический анализ механизма с гидроцилиндром аналитическим методом
Постановка задачи
Кинематическая схема механизма приведена
Кинематический анализ механизма с гидроцилиндром аналитическим методом
Постановка задачи
Кинематическая схема механизма приведена

Определение кинематических параметров звеньев механизма с гидроцилиндром
Векторное уравнение замкнутости контура АВС
Определение кинематических параметров звеньев механизма с гидроцилиндром
Векторное уравнение замкнутости контура АВС

Кинематические характеристики звеньев механизма с гидроцилиндром
Кинематические характеристики звеньев механизма с гидроцилиндром
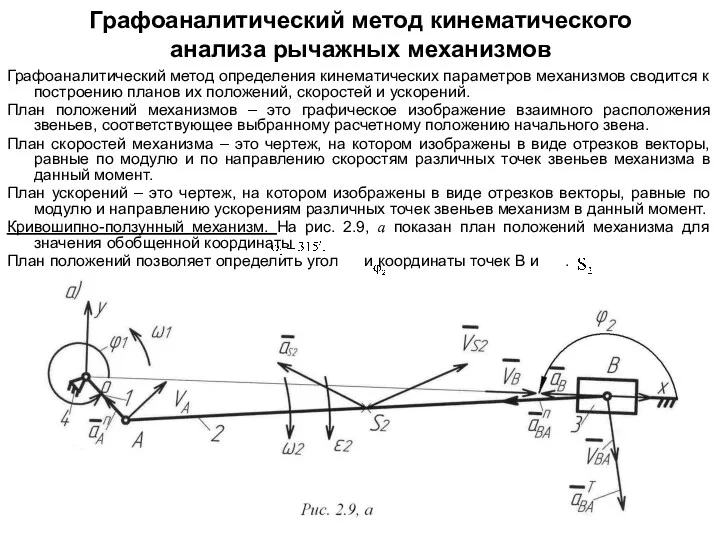
Графоаналитический метод кинематического анализа рычажных механизмов
Графоаналитический метод определения кинематических параметров механизмов
Графоаналитический метод кинематического анализа рычажных механизмов
Графоаналитический метод определения кинематических параметров механизмов
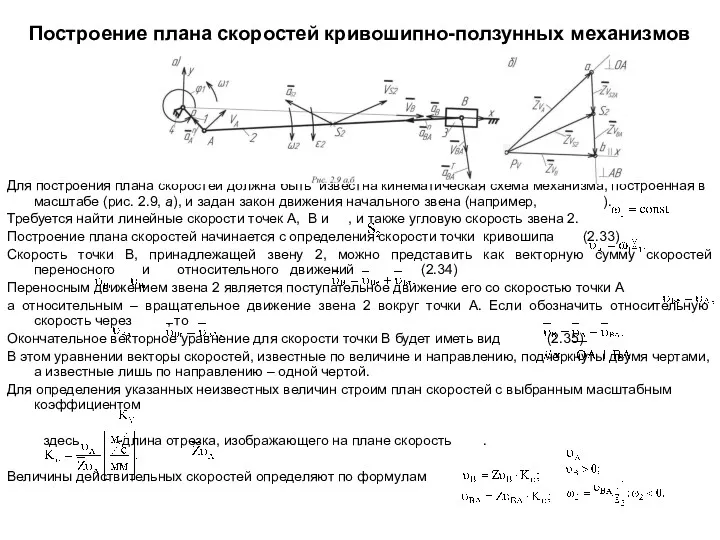
Построение плана скоростей кривошипно-ползунных механизмов
Для построения плана скоростей должна быть известна
Построение плана скоростей кривошипно-ползунных механизмов
Для построения плана скоростей должна быть известна
 Теплотехника. Термодинамика открытых систем
Теплотехника. Термодинамика открытых систем Физика в професії кухаря
Физика в професії кухаря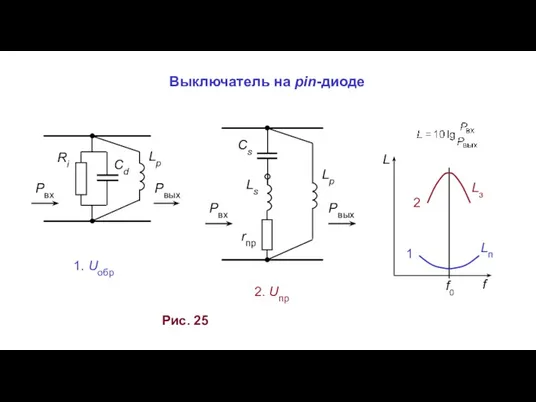 Выключатель на pin-диоде. Антенный переключатель. Стабилизатор мощности
Выключатель на pin-диоде. Антенный переключатель. Стабилизатор мощности Електрика в житті людини
Електрика в житті людини Ременные передачи
Ременные передачи Источники звука и звуковые колебания
Источники звука и звуковые колебания Зарождения ракетных двигателей
Зарождения ракетных двигателей Биологическое действие радиации. Закон радиоактивного распада. 9 класс
Биологическое действие радиации. Закон радиоактивного распада. 9 класс Тормозные системы
Тормозные системы Повторение по теме Законы движения и взаимодействия тел
Повторение по теме Законы движения и взаимодействия тел Ішкi энергия. Ішкi энергияны өзгерту тәсiлдерi
Ішкi энергия. Ішкi энергияны өзгерту тәсiлдерi электрический ток в металлах
электрический ток в металлах Ультрақысқа толқындар
Ультрақысқа толқындар Принцип Гюйгенса. Закон отражения света
Принцип Гюйгенса. Закон отражения света Ремонт автомобилей. Классификация способов восстановления деталей. (Тема 3.1)
Ремонт автомобилей. Классификация способов восстановления деталей. (Тема 3.1) Работа и мощность электрического тока
Работа и мощность электрического тока Электромагнитная волна, поляризация ЭМВ
Электромагнитная волна, поляризация ЭМВ Механизмы поворота. Устройство и расчет. (Лекция № 5)
Механизмы поворота. Устройство и расчет. (Лекция № 5) Альфа-распад
Альфа-распад Барометрическая формула. (Лекция 6)
Барометрическая формула. (Лекция 6) Lektsia_9_Difraktsia_Frenelya
Lektsia_9_Difraktsia_Frenelya Kiyi ve liman yapilari
Kiyi ve liman yapilari Презентация к уроку физики по теме: Электрическое сопротивление
Презентация к уроку физики по теме: Электрическое сопротивление Движение под действием силы тяжести. Решение задач
Движение под действием силы тяжести. Решение задач Master thesis
Master thesis Законы Ньютона
Законы Ньютона Потенциальная и кинетическая энергия
Потенциальная и кинетическая энергия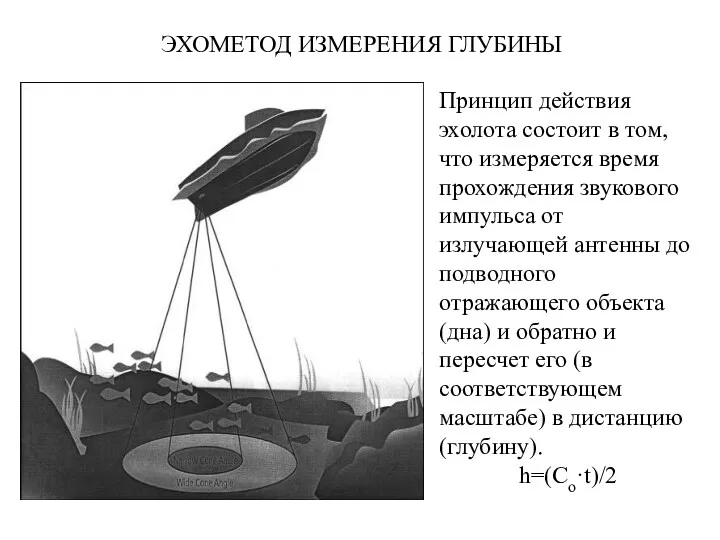 Эхометод измерения глубины
Эхометод измерения глубины