- Master thesis

Содержание
- 2. THESIS AIM Research object: ISEAUTO self-driving vehicle. Thesis tasks: Theoretical study of vehicle dynamics. Creating of
- 3. ISEAUTO TECHNICAL PARAMETERS Capacity: 4 + 2 passengers Speed: 10 km/h, max 50 km/h Main motor:
- 4. TYPICAL LOSSES OF VEHICLE MOVEMENT
- 5. DYNAMIC MODEL OF THE ISEAUTO
- 6. MOTOR Torque output. Rotor speed of rotation. Motor inertia. Throttle rate.
- 7. MASS DISTRIBUTION
- 8. BODY DYNAMICS Longitudinal and normal forces of wheels. Location of vehicle CM. Distance between axles. Surface
- 9. TRANSMISSION AND DIFFERENTIAL Gear ratio. Transmission efficiency. Differential efficiency. Transmission parts inertia. Differential parts inertia.
- 10. FORWARD AND REAR AXLES Drive shafts efficiency. Drive shafts inertia. Suspension stiffness.
- 11. TIRE DYNAMICS Wheel parameters. Loading ratio. Slip ratio. Type of surface. Rolling resistance.
- 12. FRONT AND REAR BRAKING SYSTEMS Geometrical parameters of a disc brake (front axle). Geometrical parameters of
- 13. MATLAB CODE
- 14. MATLAB VARIABLES
- 15. SIMULINK
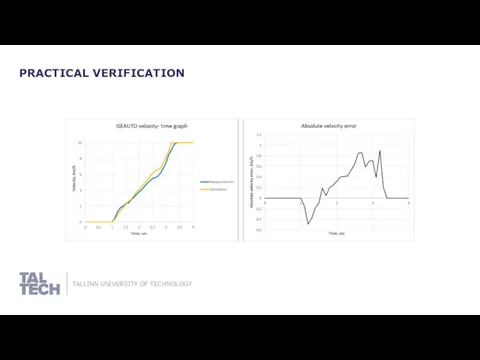
- 16. PRACTICAL VERIFICATION
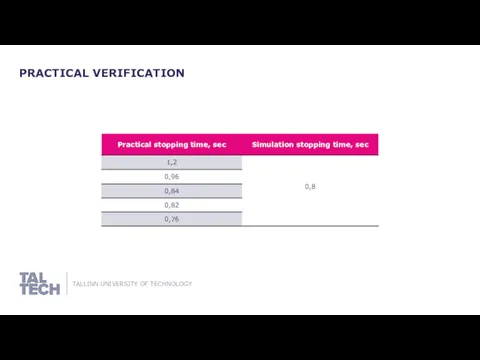
- 17. PRACTICAL VERIFICATION
- 18. PRACTICAL VERIFICATION
- 19. PRACTICAL VERIFICATION
- 20. PRACTICAL VERIFICATION
- 21. SUMMARY Developed dynamics model considers main ISEAUTO parameters and its structural and drive elements. Simulation was
- 23. Скачать презентацию
THESIS AIM
Research object: ISEAUTO self-driving vehicle.
Thesis tasks:
Theoretical study of vehicle dynamics.
Creating
THESIS AIM
Research object: ISEAUTO self-driving vehicle.
Thesis tasks:
Theoretical study of vehicle dynamics.
Creating

ISEAUTO TECHNICAL PARAMETERS
Capacity: 4 + 2 passengers
Speed: 10 km/h, max 50
ISEAUTO TECHNICAL PARAMETERS
Capacity: 4 + 2 passengers
Speed: 10 km/h, max 50
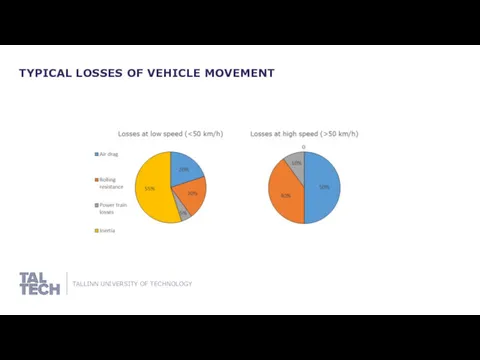
TYPICAL LOSSES OF VEHICLE MOVEMENT
TYPICAL LOSSES OF VEHICLE MOVEMENT
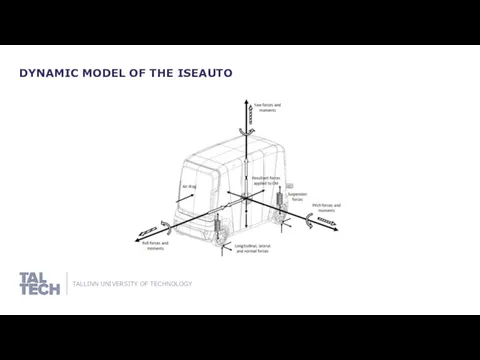
DYNAMIC MODEL OF THE ISEAUTO
DYNAMIC MODEL OF THE ISEAUTO
MOTOR
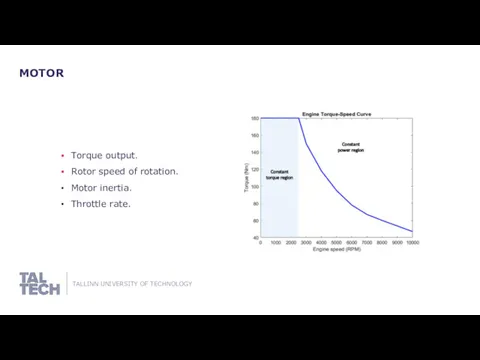
Torque output.
Rotor speed of rotation.
Motor inertia.
Throttle rate.
MOTOR
Torque output.
Rotor speed of rotation.
Motor inertia.
Throttle rate.
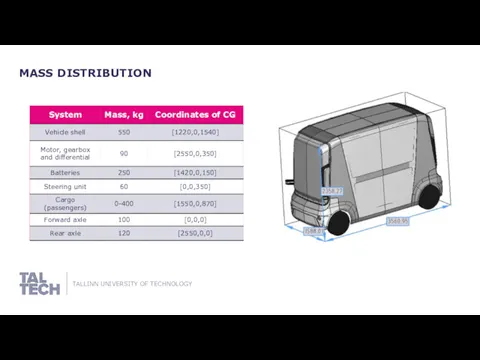
MASS DISTRIBUTION
MASS DISTRIBUTION
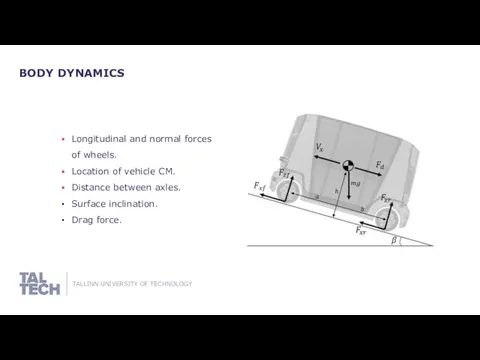
BODY DYNAMICS
Longitudinal and normal forces of wheels.
Location of vehicle CM.
Distance between
BODY DYNAMICS
Longitudinal and normal forces of wheels.
Location of vehicle CM.
Distance between
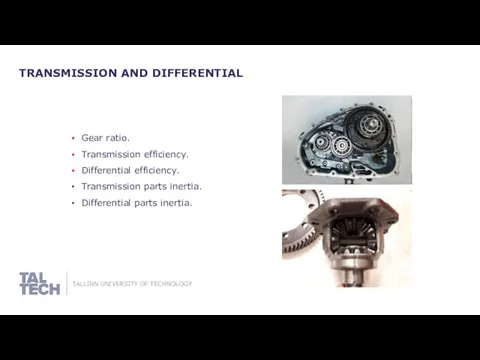
TRANSMISSION AND DIFFERENTIAL
Gear ratio.
Transmission efficiency.
Differential efficiency.
Transmission parts inertia.
Differential parts inertia.
TRANSMISSION AND DIFFERENTIAL
Gear ratio.
Transmission efficiency.
Differential efficiency.
Transmission parts inertia.
Differential parts inertia.
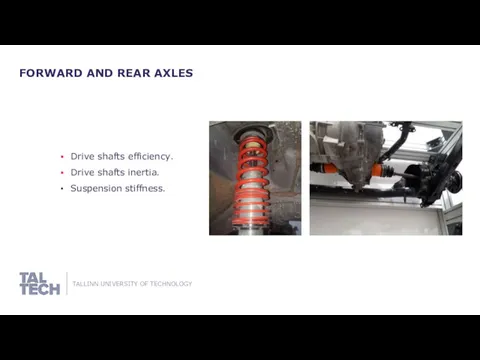
FORWARD AND REAR AXLES
Drive shafts efficiency.
Drive shafts inertia.
Suspension stiffness.
FORWARD AND REAR AXLES
Drive shafts efficiency.
Drive shafts inertia.
Suspension stiffness.
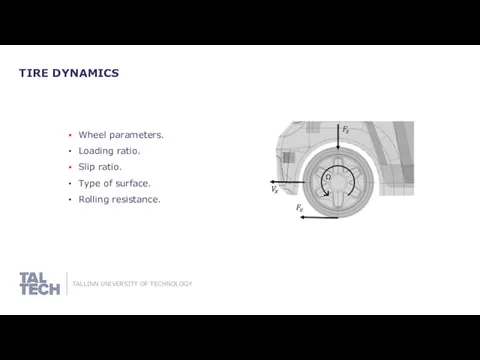
TIRE DYNAMICS
Wheel parameters.
Loading ratio.
Slip ratio.
Type of surface.
Rolling resistance.
TIRE DYNAMICS
Wheel parameters.
Loading ratio.
Slip ratio.
Type of surface.
Rolling resistance.
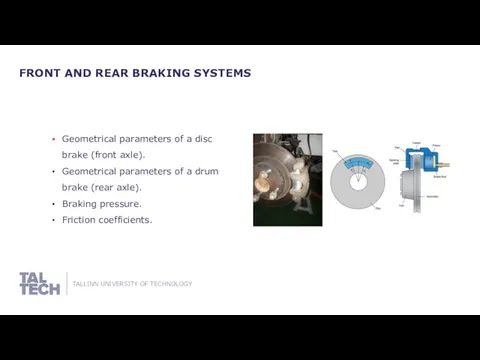
FRONT AND REAR BRAKING SYSTEMS
Geometrical parameters of a disc brake (front
FRONT AND REAR BRAKING SYSTEMS
Geometrical parameters of a disc brake (front
MATLAB CODE
MATLAB CODE
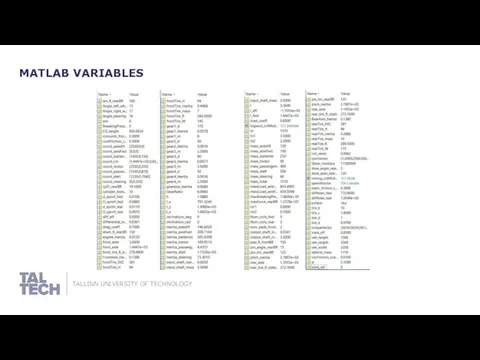
MATLAB VARIABLES
MATLAB VARIABLES
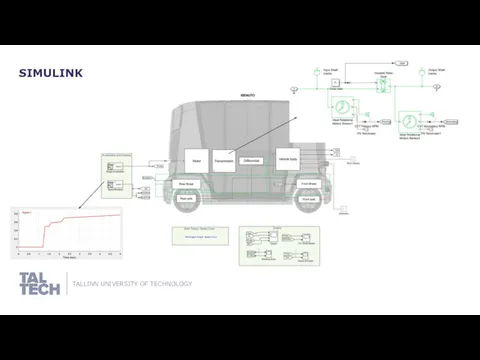
SIMULINK
SIMULINK
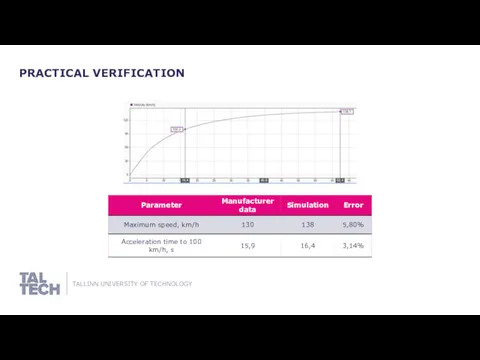
PRACTICAL VERIFICATION
PRACTICAL VERIFICATION
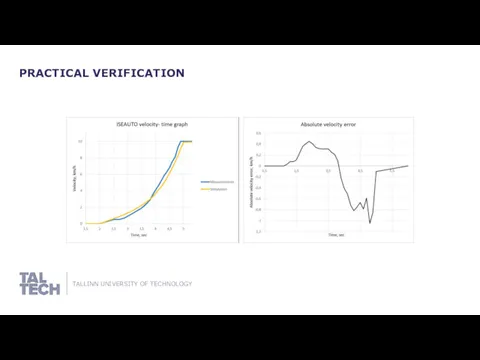
PRACTICAL VERIFICATION
PRACTICAL VERIFICATION
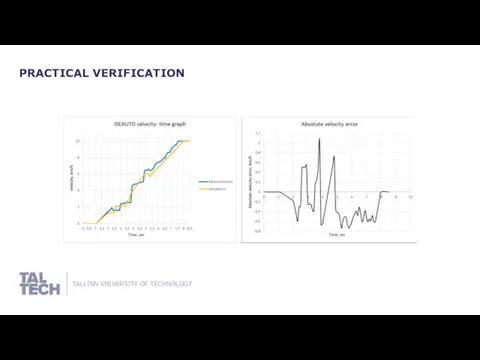
PRACTICAL VERIFICATION
PRACTICAL VERIFICATION
PRACTICAL VERIFICATION
PRACTICAL VERIFICATION
PRACTICAL VERIFICATION
PRACTICAL VERIFICATION
SUMMARY
Developed dynamics model considers main ISEAUTO parameters and its structural and
SUMMARY
Developed dynamics model considers main ISEAUTO parameters and its structural and
 Основные параметры эхо-метода
Основные параметры эхо-метода Физические основы механики. Кинематика материальной точки
Физические основы механики. Кинематика материальной точки Современные автомобили и двигатели
Современные автомобили и двигатели Машина и ее основные части
Машина и ее основные части Лекция №7 (7). Электромагнитные волны в различных средах
Лекция №7 (7). Электромагнитные волны в различных средах yadernaya_fizika (1)
yadernaya_fizika (1) Средства измерения уровня
Средства измерения уровня Законы сохранения
Законы сохранения Basic principles of ultrasonic testing
Basic principles of ultrasonic testing Жаңбырлатқыш машиналар қондырғылар
Жаңбырлатқыш машиналар қондырғылар Определение твёрдости металлов и сплавов
Определение твёрдости металлов и сплавов Открытие нейтрона
Открытие нейтрона Презентация к уроку по теме Сила тяжести
Презентация к уроку по теме Сила тяжести Магнитное поле
Магнитное поле Напряженность электрического поля. Принцип суперпозиции полей
Напряженность электрического поля. Принцип суперпозиции полей Звуковые явления. Эхо
Звуковые явления. Эхо Электрическое напряжение. Единицы напряжения. Вольтметр
Электрическое напряжение. Единицы напряжения. Вольтметр Магнитное поле в веществе. Система уравнений Максвелла. Тема 18
Магнитное поле в веществе. Система уравнений Максвелла. Тема 18 Презентация Современный урок
Презентация Современный урок Урок физики в 9 классе Колебательное движение.
Урок физики в 9 классе Колебательное движение. Модуляция и детектирование
Модуляция и детектирование Фізичні та хімічні властивості води
Фізичні та хімічні властивості води Intelligent energy storage
Intelligent energy storage Ультразвуковой контроль
Ультразвуковой контроль Renewable power
Renewable power Звуковая волна
Звуковая волна Направление тока и направление линий его магнитного поля. (Урок 40)
Направление тока и направление линий его магнитного поля. (Урок 40) Механика и свойства жидкостей. (Лекция 3)
Механика и свойства жидкостей. (Лекция 3)