- Кинематика вращательного движения

Содержание
- 2. В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать следующим образом: 1. aτ =
- 3. 3. aτ = f(t), an = 0 – прямолинейное движение с переменным ускорением. 4. aτ =
- 4. 5. aτ = 0, an ≠ 0 – равномерное криволинейное движение. 6. aτ = const, an
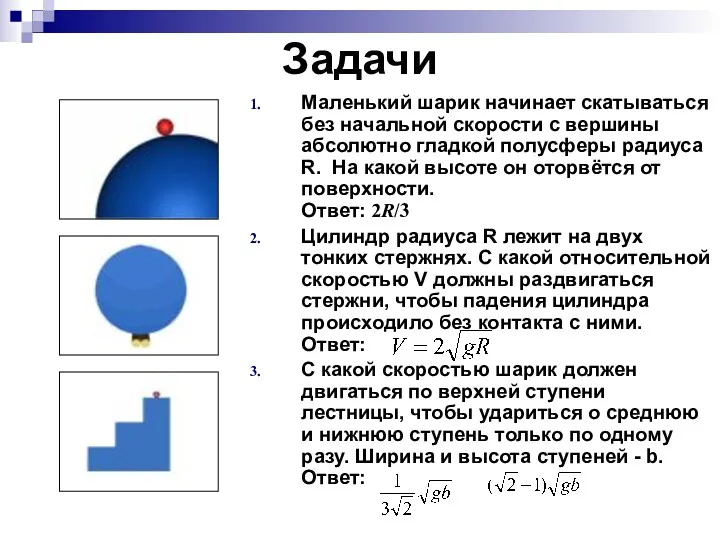
- 5. Задачи Маленький шарик начинает скатываться без начальной скорости с вершины абсолютно гладкой полусферы радиуса R. На
- 6. Лекция 3. Кинематика вращательного движения 3.1. Равномерное вращательное движение. 3.2. Неравномерное вращательное движение. 3.3. Кинематика вращательного
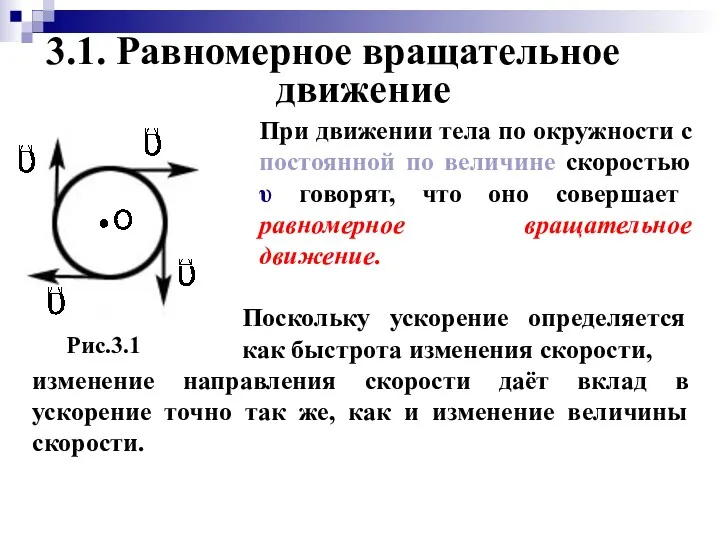
- 7. 3.1. Равномерное вращательное движение
- 10. Поэтому это ускорение и называют центростреми-тельным ускорением. Мы обозначали его в предыдущей лекции как и записали
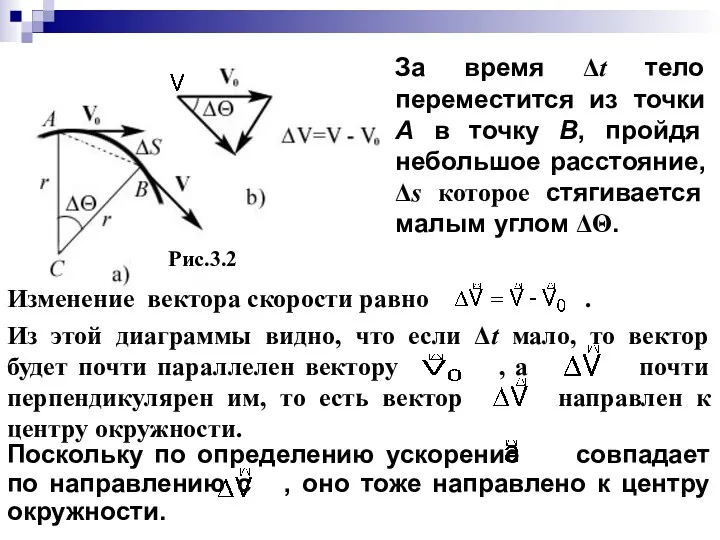
- 13. поскольку скорость направлена по касательной к окружности, а ускорение направлено к её центру; при этом направления
- 14. При рассмотрении свободного падения и баллистичес-кого движения, поскольку в этих случаях постоянно как по величине так
- 15. 3.2. Неравномерное вращательное движение
- 16. Содержание
- 17. Рис.3.5. 3.3. Кинематика вращательного движения тела вокруг оси
- 18. Рис.3.6.
- 20. малые) углы поворота рассматривают как векторы. Модуль вектора равен углу поворота, а его направление совпадает с
- 22. Рис.3.8.
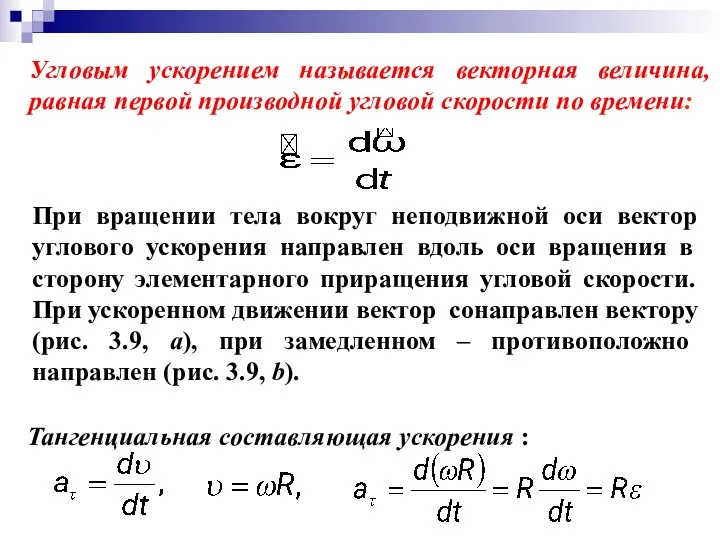
- 23. Рис.3.9.
- 25. В случае равнопеременного движения точки по окружности (ε=const): ω=ω0±εt, φ=ω0t±εt 2/2, где ω0 – начальная угловая
- 27. Скачать презентацию
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать
В зависимости от тангенциальной и нормальной составляющих ускорения движение можно классифицировать
3. aτ = f(t), an = 0 – прямолинейное движение с
3. aτ = f(t), an = 0 – прямолинейное движение с
5. aτ = 0, an ≠ 0 – равномерное криволинейное движение.
5. aτ = 0, an ≠ 0 – равномерное криволинейное движение.
Задачи
Маленький шарик начинает скатываться без начальной скорости с вершины абсолютно гладкой
Задачи
Маленький шарик начинает скатываться без начальной скорости с вершины абсолютно гладкой
Лекция 3. Кинематика вращательного движения
3.1. Равномерное вращательное движение.
3.2. Неравномерное вращательное
Лекция 3. Кинематика вращательного движения
3.1. Равномерное вращательное движение.
3.2. Неравномерное вращательное
3.1. Равномерное вращательное движение
3.1. Равномерное вращательное движение
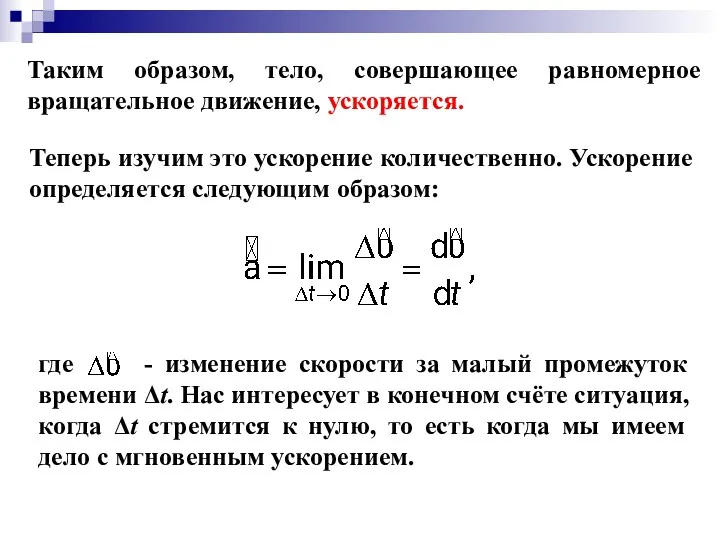
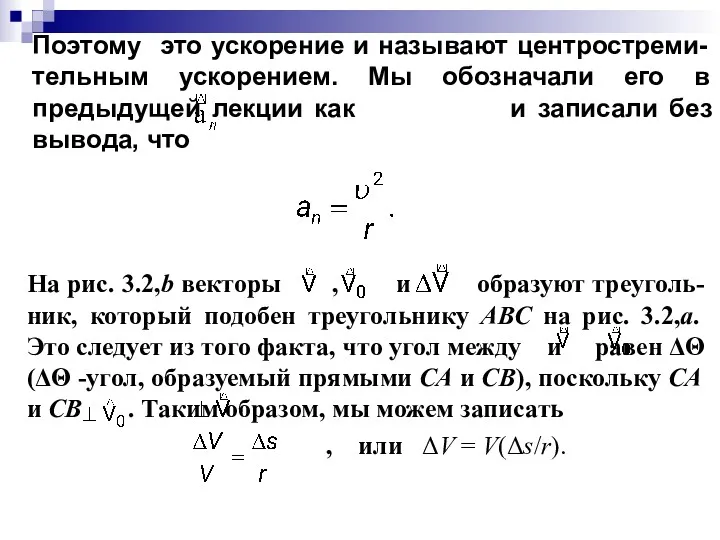
Поэтому это ускорение и называют центростреми-тельным ускорением. Мы обозначали его в
Поэтому это ускорение и называют центростреми-тельным ускорением. Мы обозначали его в
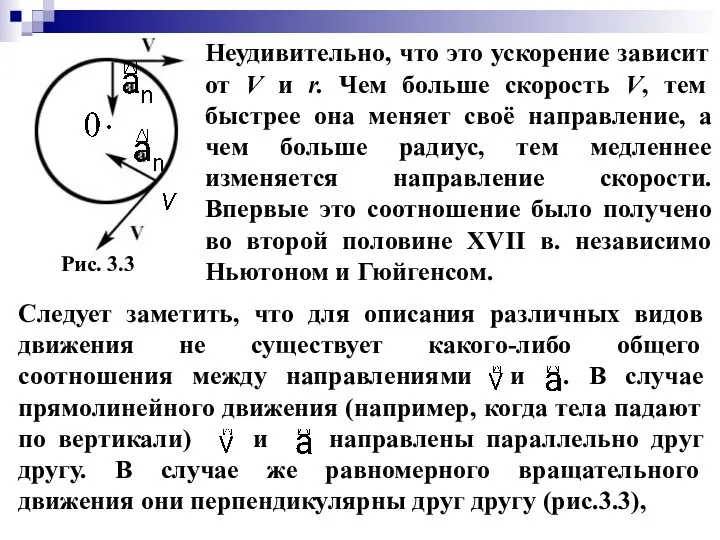
поскольку скорость направлена по касательной к окружности, а ускорение направлено к
поскольку скорость направлена по касательной к окружности, а ускорение направлено к
При рассмотрении свободного падения и баллистичес-кого движения, поскольку в этих случаях
При рассмотрении свободного падения и баллистичес-кого движения, поскольку в этих случаях
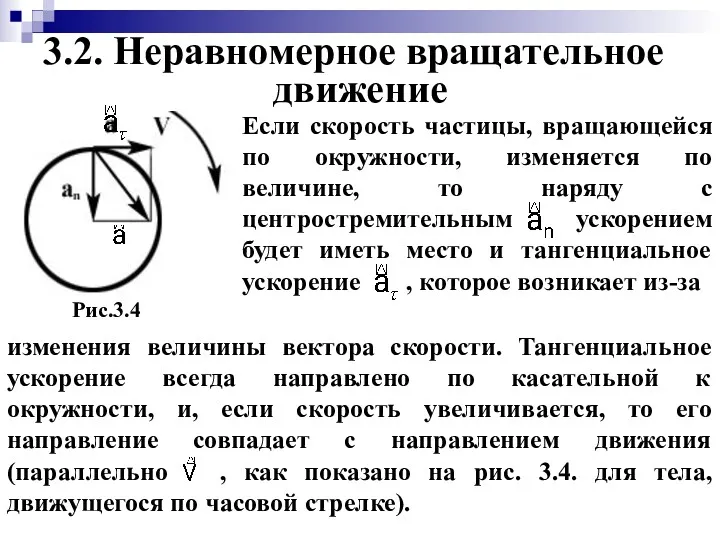
3.2. Неравномерное вращательное движение
3.2. Неравномерное вращательное движение
Содержание
Содержание
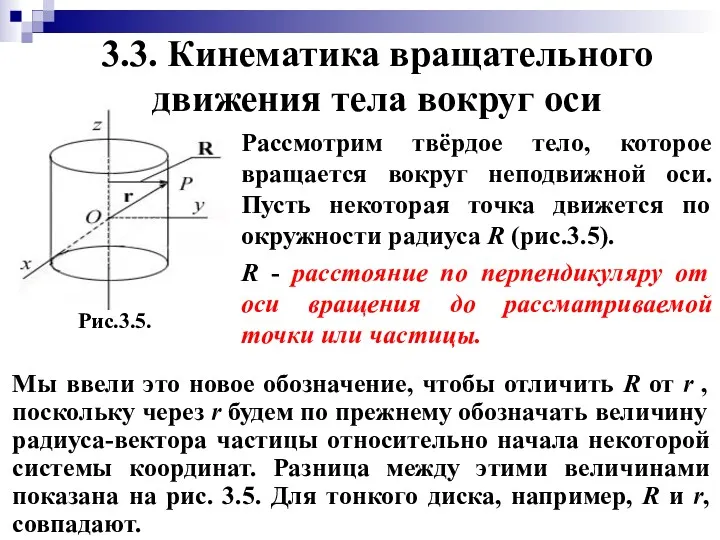
Рис.3.5.
3.3. Кинематика вращательного движения тела вокруг оси
Рис.3.5.
3.3. Кинематика вращательного движения тела вокруг оси
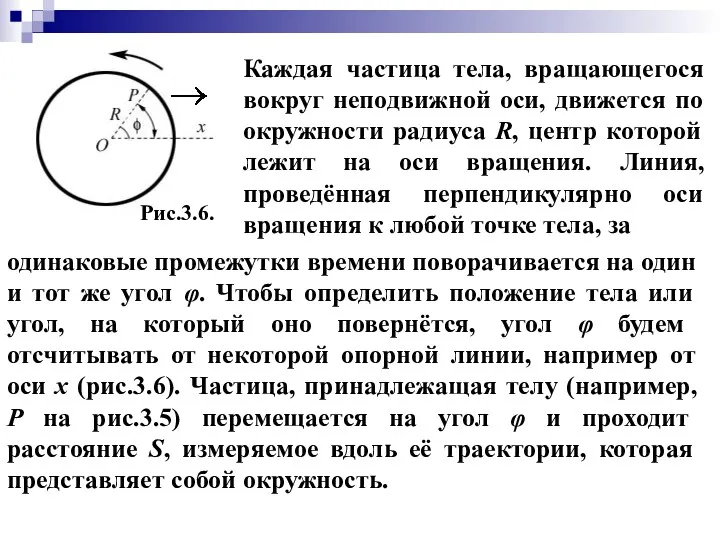
Рис.3.6.
Рис.3.6.
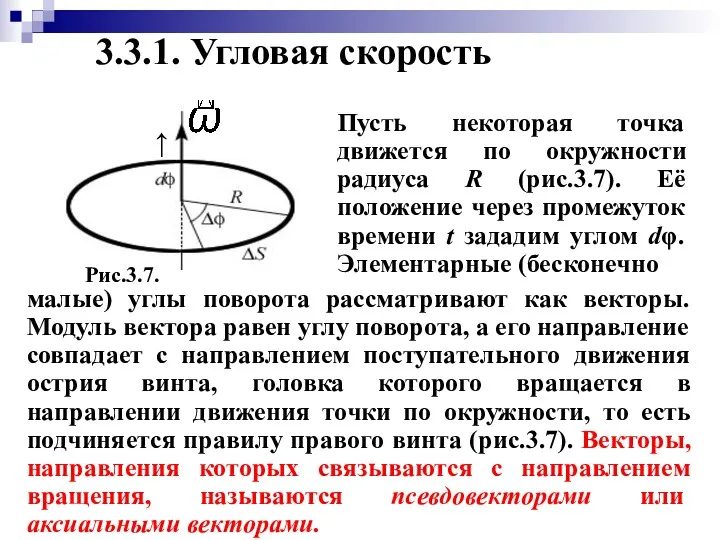
малые) углы поворота рассматривают как векторы. Модуль вектора равен углу поворота,
малые) углы поворота рассматривают как векторы. Модуль вектора равен углу поворота,
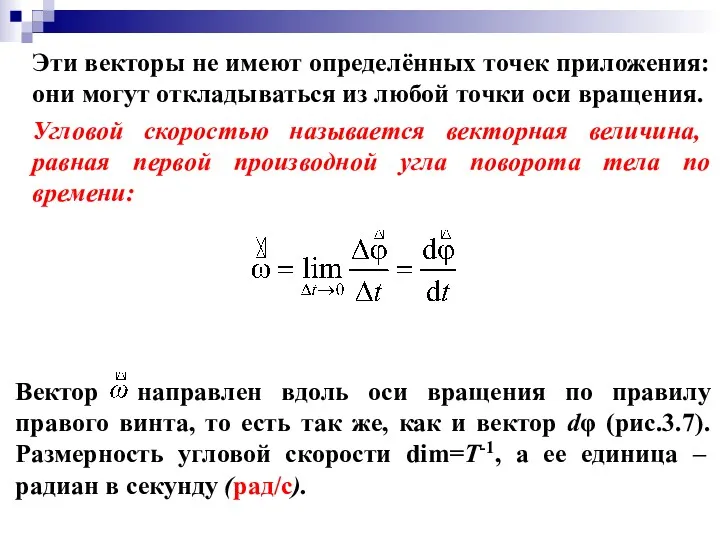
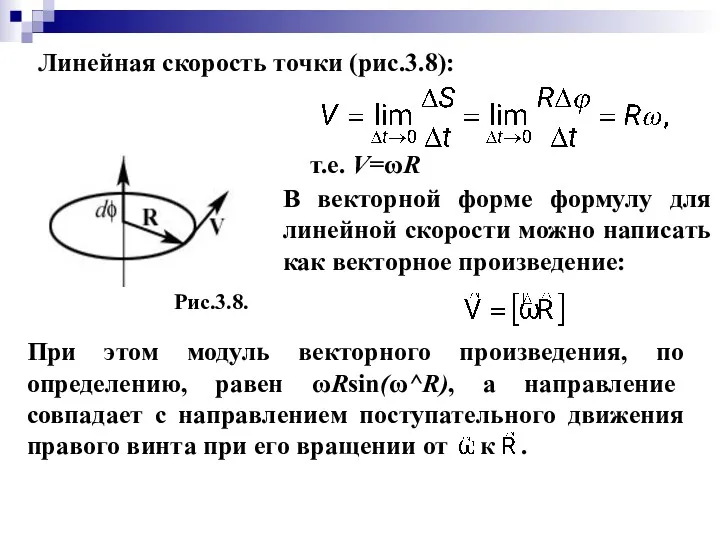
Рис.3.8.
Рис.3.8.
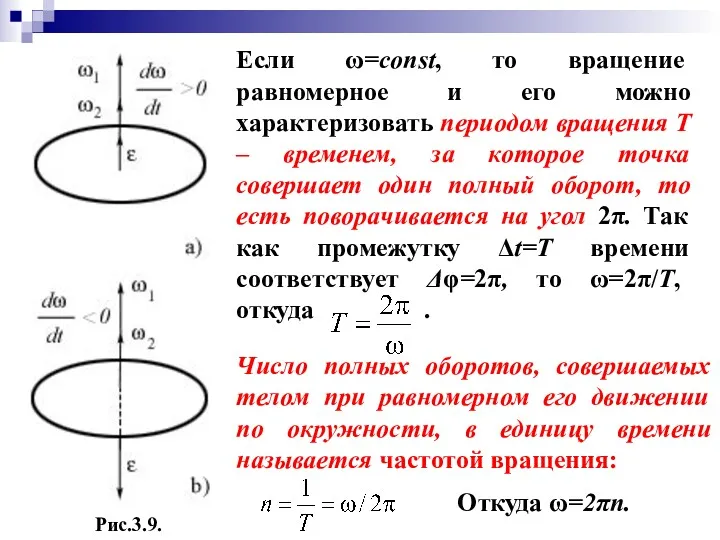
Рис.3.9.
Рис.3.9.
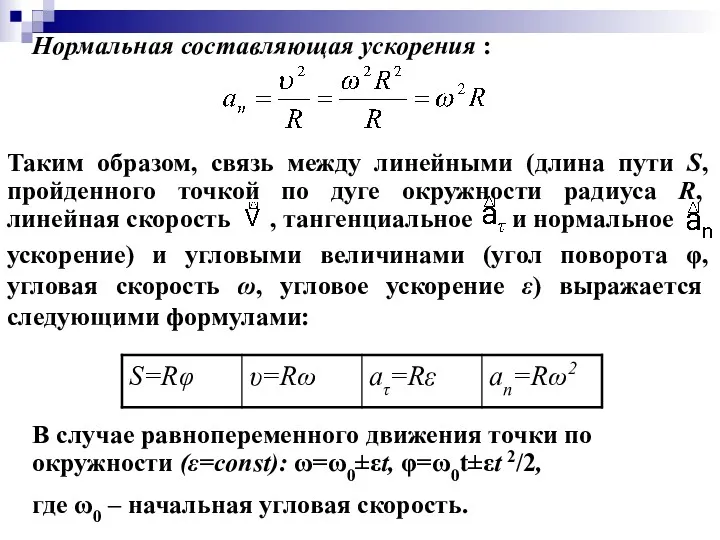
В случае равнопеременного движения точки по окружности (ε=const): ω=ω0±εt, φ=ω0t±εt 2/2,
В случае равнопеременного движения точки по окружности (ε=const): ω=ω0±εt, φ=ω0t±εt 2/2,
 Тесты по физике. Электрические заряды и электрический ток
Тесты по физике. Электрические заряды и электрический ток Модели атомов. Опыт Резерфорда
Модели атомов. Опыт Резерфорда Требования к машинам и деталям
Требования к машинам и деталям Механическое движение. Плотность тела. Повторительно-обобщающий урок
Механическое движение. Плотность тела. Повторительно-обобщающий урок Сложное сопротивление
Сложное сопротивление Гальваническое покрытие
Гальваническое покрытие 7 класс. Презентация по физике на тему Простые механизмы. Условие равновесия рычага
7 класс. Презентация по физике на тему Простые механизмы. Условие равновесия рычага Релятивистская механика. (Тема 6)
Релятивистская механика. (Тема 6) Модернизация и моделирование электропривода дверей лифта за счет применения линейного двигателя
Модернизация и моделирование электропривода дверей лифта за счет применения линейного двигателя Урок по теме: Сообщающие сосуды.
Урок по теме: Сообщающие сосуды. Конспект к уроку на тему РЕШЕНИЕ ЗАДАЧ НА РАСЧЕТ СОПРОТИВЛЕНИЯ ПРОВОДНИКА, СИЛЫ ТОКА, НАПРЯЖЕНИЯ.
Конспект к уроку на тему РЕШЕНИЕ ЗАДАЧ НА РАСЧЕТ СОПРОТИВЛЕНИЯ ПРОВОДНИКА, СИЛЫ ТОКА, НАПРЯЖЕНИЯ. Электризация тел
Электризация тел Сила Ампера
Сила Ампера Механічна робота
Механічна робота Алгоритм решения задач по теме Динамика
Алгоритм решения задач по теме Динамика Методы электрофизической и электрохимической обработки поверхностей заготовок
Методы электрофизической и электрохимической обработки поверхностей заготовок Электростатика Электрические взаимодействия (часть 1)
Электростатика Электрические взаимодействия (часть 1) Способы герметизации клепаных швов и изделий
Способы герметизации клепаных швов и изделий Холодильні машини
Холодильні машини Силы в механике. Для изучения темы в курсе 10 класса
Силы в механике. Для изучения темы в курсе 10 класса Аэрогазодинамика. Основы теории профиля и крыла (лекции 20, 21)
Аэрогазодинамика. Основы теории профиля и крыла (лекции 20, 21) Ионизирующее излучение
Ионизирующее излучение Конспект урока физики в 7 классе по теме Скорость. Единицы скорости
Конспект урока физики в 7 классе по теме Скорость. Единицы скорости Точечные дефекты и их влияние на свойства кристаллов. Равновесные и неравновесные дефекты. Примеси в полупроводниках
Точечные дефекты и их влияние на свойства кристаллов. Равновесные и неравновесные дефекты. Примеси в полупроводниках электрическое поле
электрическое поле 20230212_zvyozdnyy_chas
20230212_zvyozdnyy_chas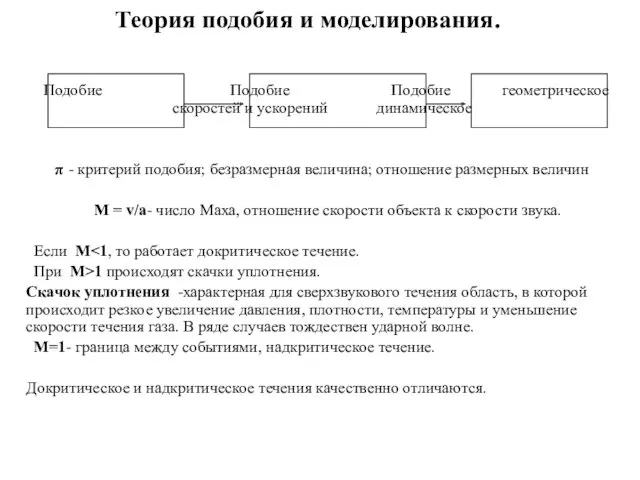 Теория подобия и моделирования
Теория подобия и моделирования Steering System
Steering System