- Колебания и волны. Механические гармонические колебания (на примере маятников)

Содержание
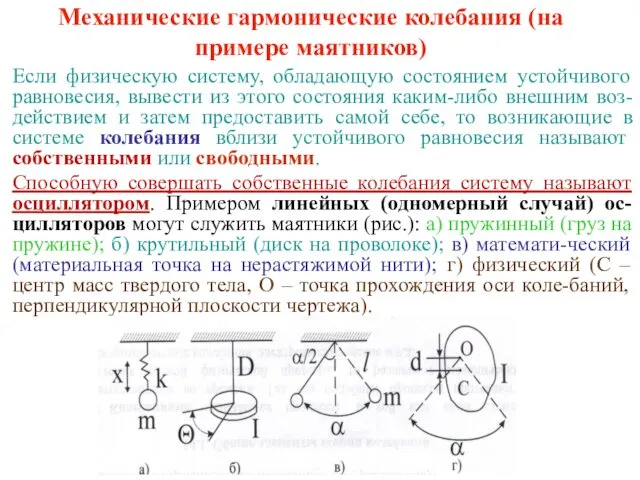
- 2. Механические гармонические колебания (на примере маятников) Если физическую систему, обладающую состоянием устойчивого равновесия, вывести из этого
- 3. Рассмотрим случай а)– пружинный маятник. Второй закон Ньютона для колеблющегося тела для одномерного случая можно записать
- 4. Потенциальная энергия ( пружинный маятник): Полная механическая энергия: Классическая колеблющаяся точка не может выйти за границы
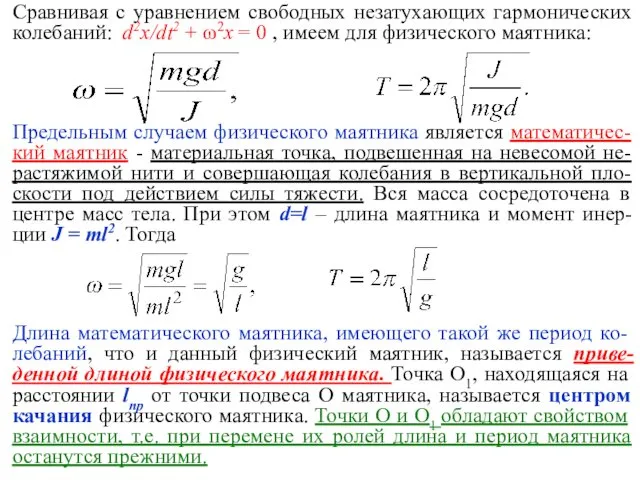
- 5. г) физический маятник Физический маятник – твердое тело, которое может совершать колебания под действием собственной силы
- 6. Сравнивая с уравнением свободных незатухающих гармонических колебаний: d2x/dt2 + ω2x = 0 , имеем для физического
- 7. Свободные гармонические колебания в электрическом колебательном контуре Простейшим колебательным контуром является замкнутая цепь, состоящая из емкости
- 8. Сложение гармонических колебаний. Фигуры Лиссажу Сложение колебаний – нахождение значения результирующих ко-лебаний системы при ее участии
- 9. Когерентными называются колебания, разность фаз которых во времени постоянна; т.к. Φ(t) = (ω2 − ω1)t +
- 11. Скачать презентацию
Механические гармонические колебания (на примере маятников)
Если физическую систему, обладающую состоянием устойчивого
Механические гармонические колебания (на примере маятников)
Если физическую систему, обладающую состоянием устойчивого
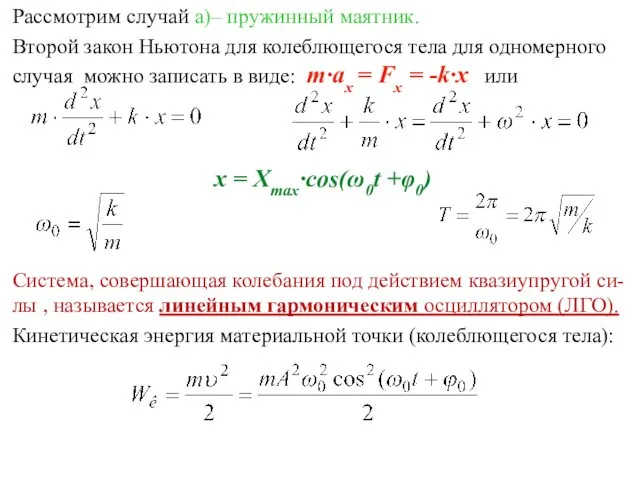
Рассмотрим случай а)– пружинный маятник.
Второй закон Ньютона для колеблющегося тела для
Рассмотрим случай а)– пружинный маятник.
Второй закон Ньютона для колеблющегося тела для
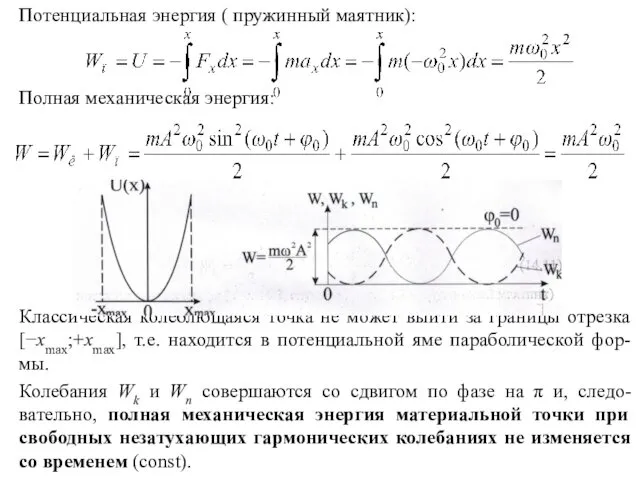
Потенциальная энергия ( пружинный маятник):
Полная механическая энергия:
Классическая колеблющаяся точка не может
Потенциальная энергия ( пружинный маятник):
Полная механическая энергия:
Классическая колеблющаяся точка не может
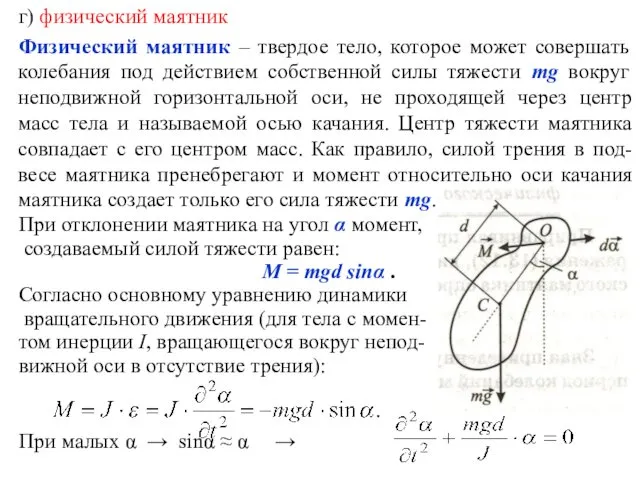
г) физический маятник
Физический маятник – твердое тело, которое может совершать колебания
г) физический маятник
Физический маятник – твердое тело, которое может совершать колебания
Сравнивая с уравнением свободных незатухающих гармонических колебаний: d2x/dt2 + ω2x =
Сравнивая с уравнением свободных незатухающих гармонических колебаний: d2x/dt2 + ω2x =
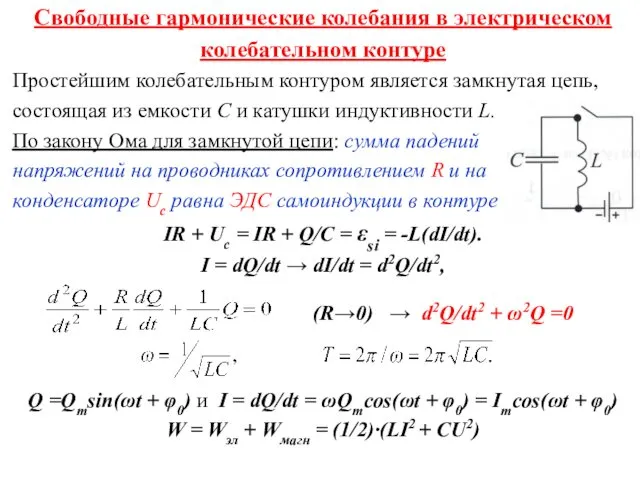
Свободные гармонические колебания в электрическом
колебательном контуре
Простейшим колебательным контуром является замкнутая цепь,
состоящая
Свободные гармонические колебания в электрическом
колебательном контуре
Простейшим колебательным контуром является замкнутая цепь,
состоящая
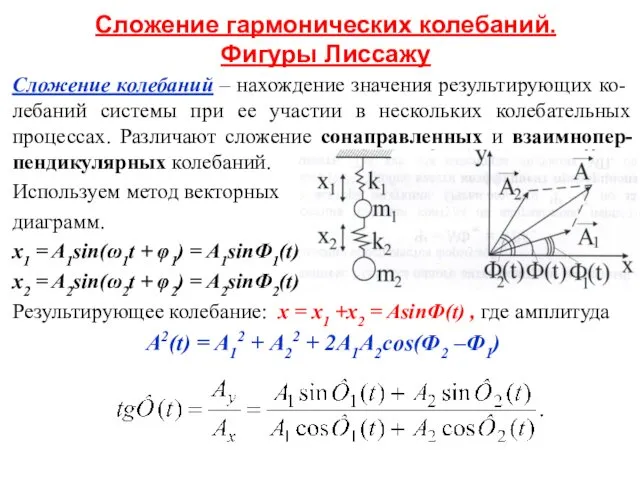
Сложение гармонических колебаний. Фигуры Лиссажу
Сложение колебаний – нахождение значения результирующих ко-лебаний
Сложение гармонических колебаний. Фигуры Лиссажу
Сложение колебаний – нахождение значения результирующих ко-лебаний
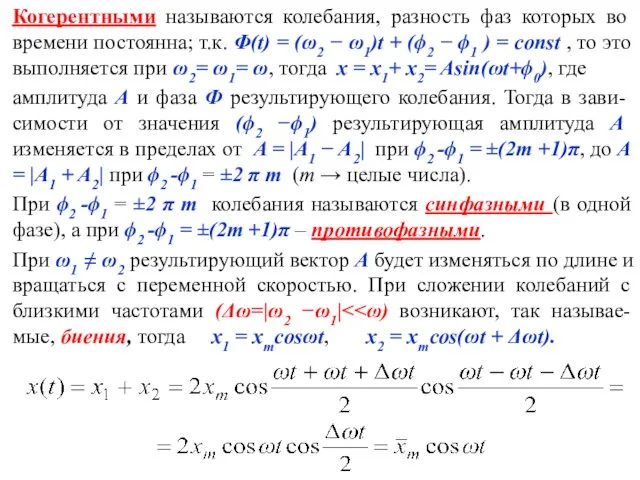
Когерентными называются колебания, разность фаз которых во времени постоянна; т.к. Φ(t)
Когерентными называются колебания, разность фаз которых во времени постоянна; т.к. Φ(t)
 Презентация к уроку в 10 классе на тему: Физика и научный метод познания
Презентация к уроку в 10 классе на тему: Физика и научный метод познания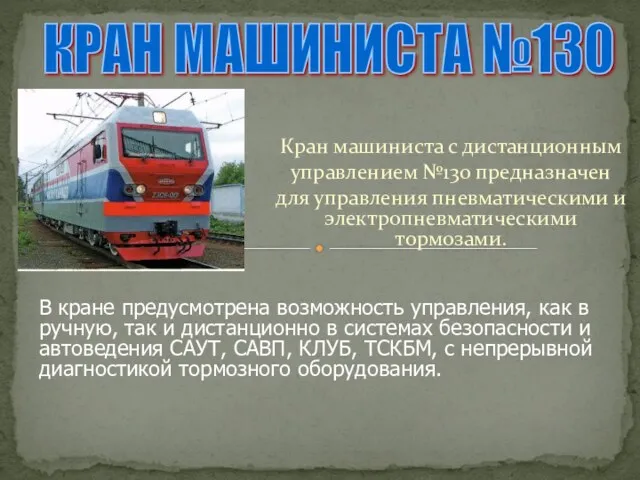 Кран машиниста поезда, с дистанционным управлением №130
Кран машиниста поезда, с дистанционным управлением №130 Презентация по теме Разделы механики для 10 класса
Презентация по теме Разделы механики для 10 класса Люминесценция, ее виды
Люминесценция, ее виды Механизмы и приводы в станках
Механизмы и приводы в станках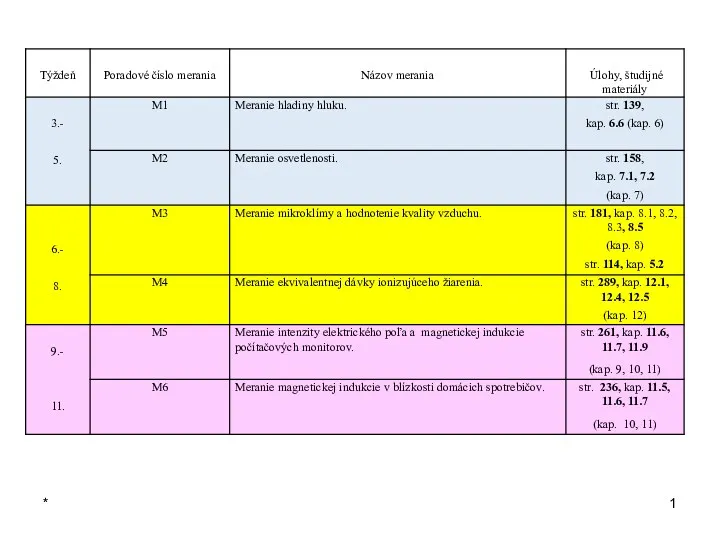 Úlohy merania mikroklímy
Úlohy merania mikroklímy Этапы развития ускорителей. Методы ускорения. Магнитная система ускорителей. Источники частиц. Синхротронное излучение
Этапы развития ускорителей. Методы ускорения. Магнитная система ускорителей. Источники частиц. Синхротронное излучение Численное моделирование инициирования и распространения волн детонации в горючих газовых смесях
Численное моделирование инициирования и распространения волн детонации в горючих газовых смесях Механические волны. 9 класс
Механические волны. 9 класс Перельман Яков Исидорович.
Перельман Яков Исидорович.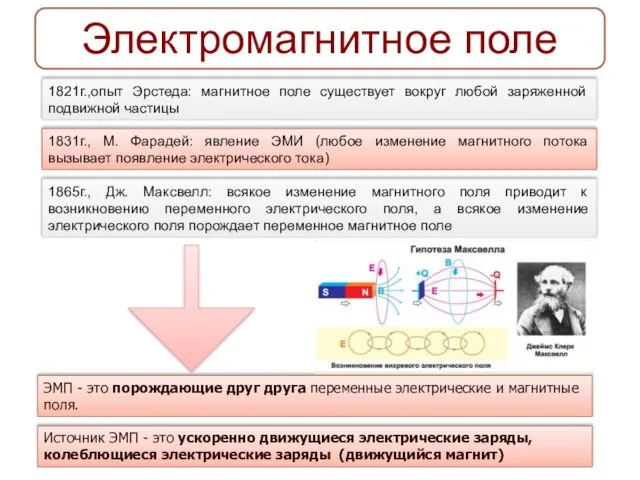 Электромагнитное поле
Электромагнитное поле Принципиальная схема подключения магнитного пускателя
Принципиальная схема подключения магнитного пускателя X6000平台电子电气系统介绍. Внедрение электронной и электрической системы платформы X6000
X6000平台电子电气系统介绍. Внедрение электронной и электрической системы платформы X6000 Физические основы работы полупроводниковых приборов. Энергетические уровни и зоны
Физические основы работы полупроводниковых приборов. Энергетические уровни и зоны Коллоидно-химические свойства и методы определения дисперсности НДС. Лекция 3
Коллоидно-химические свойства и методы определения дисперсности НДС. Лекция 3 Основы гидравлики
Основы гидравлики Приводы подвагонных генераторов
Приводы подвагонных генераторов Организация работ по ТО и ТР автомобилей Lada Granta с детальной разработкой участка покраски
Организация работ по ТО и ТР автомобилей Lada Granta с детальной разработкой участка покраски Компенсация реактивной мощности. (БСК). Лекция 04
Компенсация реактивной мощности. (БСК). Лекция 04 Приложения химической термодинамики. Термодинамика фазовых равновесий
Приложения химической термодинамики. Термодинамика фазовых равновесий Намагниченность. Напряженность магнитного поля
Намагниченность. Напряженность магнитного поля Организация рабочего места слесаря. Тема 1.2
Организация рабочего места слесаря. Тема 1.2 Кулон заңы
Кулон заңы Баллистика и аэродинамика
Баллистика и аэродинамика Электризация тел. Два рода зарядов
Электризация тел. Два рода зарядов Где живет электричество?
Где живет электричество? Тепловое равновесие. Температура и ее измерение.
Тепловое равновесие. Температура и ее измерение. Трансформаторы. Устройство трансформатора
Трансформаторы. Устройство трансформатора