- Колебания. Периодическая величина: функция f(t)

Содержание
- 2. Периодическая величина: функция f(t) есть периодическая функция (величина) с периодом Т если f(t)=f(t+T) Колебаниями называются процессы,
- 3. Свободные, собственные и вынужденные колебания Если система каким-либо образом выведена из равновесия и затем предоставлена самой
- 4. Гармонические колебания Во многих случаях разнообразные периодические процессы могут быть представлены как суперпозиция гармонических колебаний. Гармоническими
- 5. Квазиупругие силы Силы любого происхождения, пропорциональные величине отклонения системы от положения равновесия и направленные к положению
- 6. Амплитуда, фаза, начальная фаза Если период равен 1 с, то частота равна 1Гц Фазой колебаний называется
- 7. Период и частота колебаний Частота v - число колебаний в единицу времени (за 1 секунду), Период
- 8. Гармонический осциллятор Тело массы m, колеблющееся горизонтально под действием силы упругости пружины F=-kx (k — коэффициент
- 9. Скорость и ускорение в гармоническом колебательном движении точки определяются соответствующими производными по времени: - Скорость изменяется
- 10. Способы представления гармонических колебаний а) аналитический: х =аsin(ωt+α) б) графический:
- 11. Кинетическая и потенциальная энергия колебаний Если проходим через положение равновесия, то вся энергия переходит в кинетическую
- 12. Физический маятник Физическим маятником называется твердое тело, которое может колебаться вокруг горизонтальной оси (возможно только при
- 13. Физический маятник Канонический вид уравнения: расстояние от неподвижной точки (крепления маятника) до центра масс тела В
- 14. Физический маятник Момент силы тяжести: = - Rmgsinα = –Pв где в = Rsinα - плечо
- 15. Центр качаний физического маятника Точка тела, лежащая на линии соединения точки подвеса и центра масс и
- 16. Теорема Гюйгенса Если точку подвеса и центр качаний поменять местами («оборотный маятник»), частота колебаний маятника не
- 17. Центр качаний физического маятника Точка тела, лежащая на линии соединения точки подвеса и центра масс и
- 18. Физический маятник В результате имеем дифференциальное уравнение гармонических колебаний, решением которого как нам уже известно является
- 19. Колебания однородного стержня Найдем, для примера, частоту колебаний однородного стержня, качающегося на оси, проходящей через его
- 20. Математический маятник Математическим маятником называется тело, массу которого можно считать сосредоточенной в одной точке, подвешенное на
- 21. Математический маятник Приведенная длина физического маятника Математический маятник – точечная масса на невесомом подвесе Приведенная длина
- 22. Измерив период колебаний маятника, можно определить ускорение свободного падения g в данном месте. Математический и физический
- 23. Превращения энергии при колебаниях Пружинный маятник. В процессе колебаний происходит превращение кинетической энергии груза в потенциальную
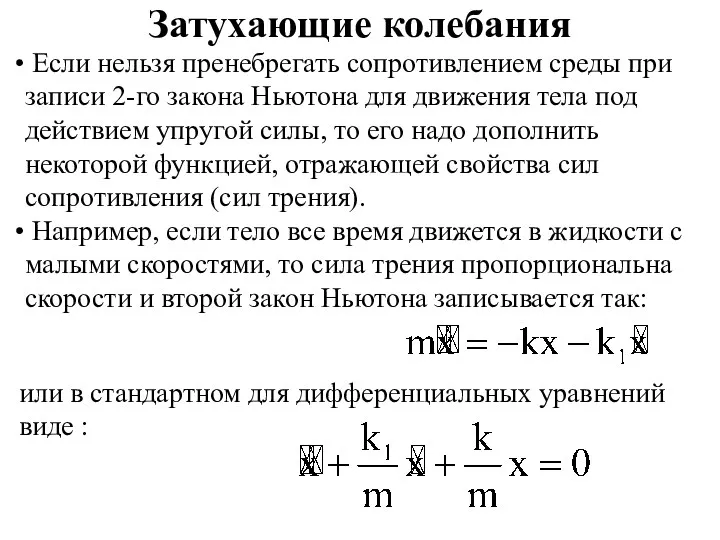
- 24. Затухающие колебания Если нельзя пренебрегать сопротивлением среды при записи 2-го закона Ньютона для движения тела под
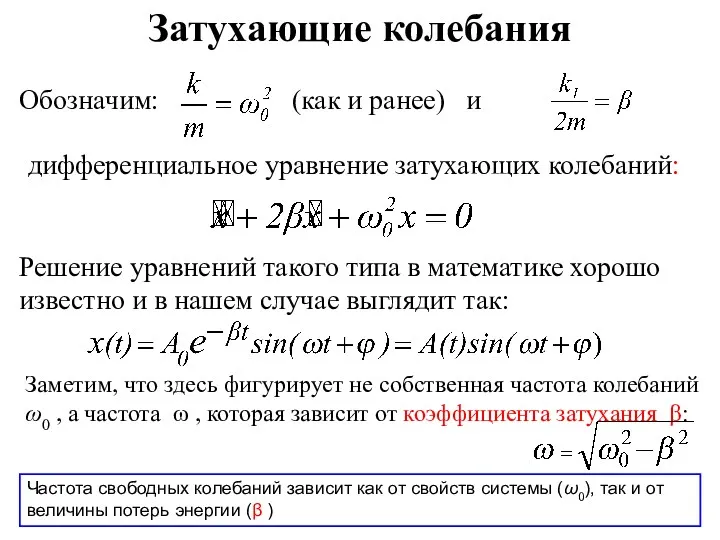
- 25. Затухающие колебания Обозначим: (как и ранее) и дифференциальное уравнение затухающих колебаний: Решение уравнений такого типа в
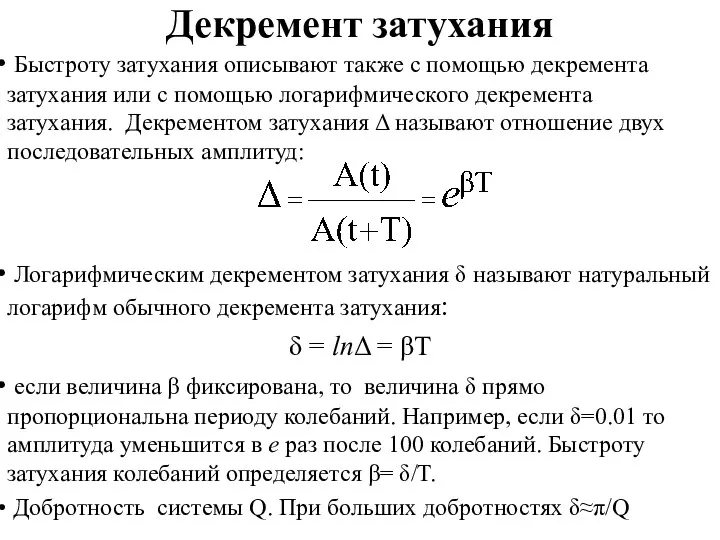
- 26. Декремент затухания Быстроту затухания описывают также с помощью декремента затухания или с помощью логарифмического декремента затухания.
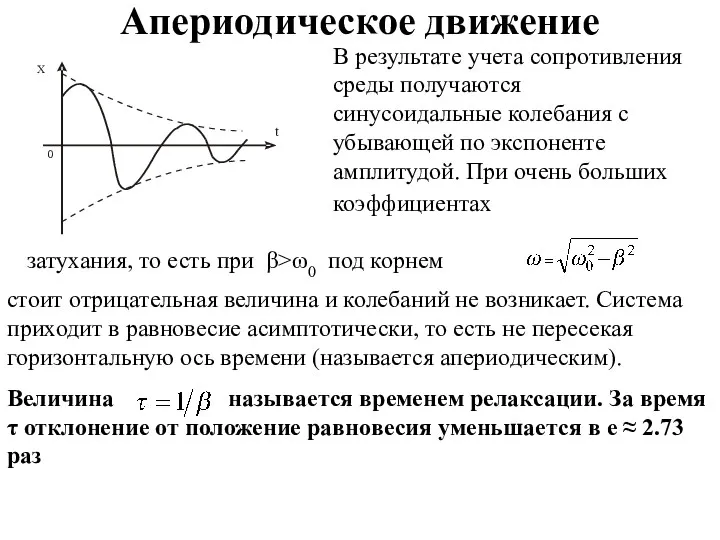
- 27. Апериодическое движение В результате учета сопротивления среды получаются синусоидальные колебания с убывающей по экспоненте амплитудой. При
- 28. Добротность Q= π/λ= πNe добротность колебательной системы – пропорциональна числу колебаний Ne, совершаемых системой за то
- 29. Вынужденные колебания Колебания, происходящие в системе под действием периодически изменяющейся силы, называются вынужденными. Пусть тело колеблется
- 30. Вынужденные колебания Опыт показывает, что если вынуждающая сила действует достаточно долго, то груз колеблется с частотой
- 31. Амплитуда и фаза Разность фаз колебаний вынуждающей силы и груза φ : Прямой подстановкой можно убедиться,
- 32. Резонанс Есть зависимость амплитуды от частоты и значит при некоторой частоте возможна максимальная амплитуда. Это будет
- 33. Резонансная частота Из двух оставшихся решений отрицательное отбрасываем как не имеющее физического смысла, так как частота
- 34. Резонансные кривые Если же трение очень велико, то есть когда 2β2>ω02, то резонанс не наблюдается и
- 35. Добротность показывает во сколько раз амплитуда в момент резонанса превышает смещение системы из положения равновесия под
- 36. Характеристики затухания колебаний. постоянная затухания колебаний; время жизни колебаний – время, в течении которого амплитуда уменьшается
- 37. Динамика изменения скорости затухающих колебаний В присутствие вязкого трения увеличивается разность фаз между колебаниями скорости и
- 38. Динамика изменения энергии затухающих колебаний Скорость изменение полной механической энергии затухающего осциллятора равна мощности диссипативной силы:
- 40. Рассеянье энергии при слабом трении Пусть коэффициент силы сопротивления достаточно мал, так что за один период
- 41. Апериодический режим затухания колебаний Графики возможно поведения отклонения от состояния равновесия демонстрируют либо монотонное приближение к
- 42. Графическое изображение колебаний Колебание представляется с помощью вектора амплитуды. Проекция конца вектора на ось будет совершать
- 43. Графическое изображение колебаний Проекция конца вектора на ось будет совершать гармоническое колебание с амплитудой, равной длине
- 44. Сложение колебаний Колеблющееся тело может участвовать в нескольких колебательных процессах, тогда необходимо найти результирующее колебание, иными
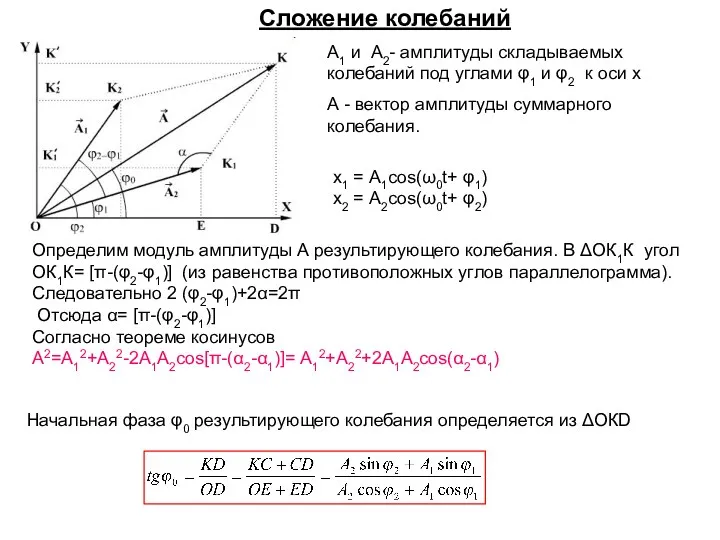
- 45. Сложение колебаний А1 и А2- амплитуды складываемых колебаний под углами φ1 и φ2 к оси х
- 46. Проанализируем выражение для амплитуды. А2=А12+А22-2А1А2cos[π-(α2-α1)]= А12+А22+2А1А2cos(α2-α1) 1)Если разность фаз обоих колебаний (φ2- φ1) равна нулю, амплитуда
- 47. Амплитуда результирующего колебания зависит от разности фаз φ = φ2 - φ1 складываемых колебаний. 1. φ
- 48. 2. φ 2 - φ 1 = ± (2m+1)π (m= 0,1,2,….) тогда A = ⏐A1 -
- 49. Для практики особый интерес представляет случай, когда два складываемых колебания одинакового направления мало отличаются по частоте.
- 50. Сумма гармонических колебаний одинакового направления, но разной частоты представляет собой сложное колебание с амплитудой изменяющейся во
- 51. Аналитическое рассмотрение упрощенного случая Амплитуды и начальные фазы складывающихся колебаний одинаковы Циклические частоты колебаний достаточно близки:
- 52. Биения– колебания с пульсирующей амплитудой. Частота биений , период биений Частота биений в два раза больше
- 53. Амплитуда биений изменяется вблизи максимального значения в тех интервалах времени, когда складывающиеся колебания происходят почти синфазно:
- 54. Анимация биений двух синусоидальных сигналов напряжения равной амплитуды близких частот. Колебания и их сумма изображены в
- 55. Режим биений, возникающий при сложении колебаний с близкими частотами, но разными амплитудами
- 56. В общем случае, колебательное движение с изменяющейся во времени амплитудой называется колебанием с модулированной амплитудой. Быстрая
- 57. Рис. 25.4,a 2аcosΔω/2t изменяется гораздо медленнее, чем cosωt. Ввиду условия Δω/2 x = а(cosωt+cos(ω+Δω)t = (2аcosΔω/2t)cosωt
- 58. Функция /cos – периодическая функция с частотой, в 2 раза превышающей частоту выражения, стоящего под знаком
- 59. Биения Биения - гармоническое колебание с пульсирующей амплитудой частоты двух складываемых колебаний мало отличаются друг от
- 60. Сложение взаимно ортогональных колебаний
- 61. Сложение ортогональных колебаний с одинаковыми частотами при различных сдвигах фазы между колебаниями.
- 63. Скачать презентацию
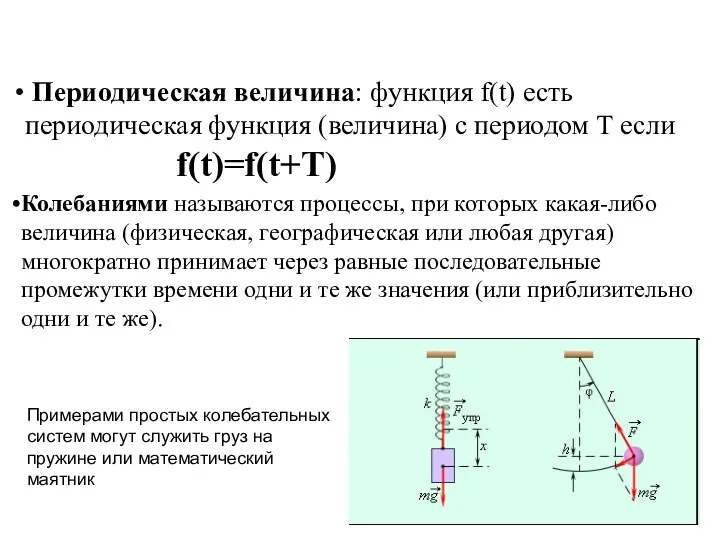
Периодическая величина: функция f(t) есть периодическая функция (величина) с периодом
Периодическая величина: функция f(t) есть периодическая функция (величина) с периодом
Свободные, собственные и вынужденные колебания
Если система каким-либо образом выведена из равновесия
Свободные, собственные и вынужденные колебания
Если система каким-либо образом выведена из равновесия
Гармонические колебания
Во многих случаях разнообразные периодические процессы могут быть представлены
Гармонические колебания
Во многих случаях разнообразные периодические процессы могут быть представлены
Квазиупругие силы
Силы любого происхождения, пропорциональные величине отклонения системы от положения равновесия
Квазиупругие силы
Силы любого происхождения, пропорциональные величине отклонения системы от положения равновесия
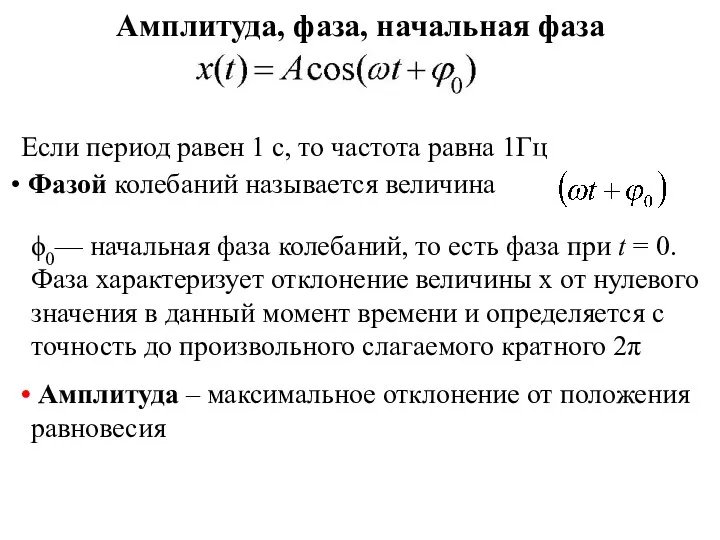
Амплитуда, фаза, начальная фаза
Если период равен 1 с, то частота равна
Амплитуда, фаза, начальная фаза
Если период равен 1 с, то частота равна
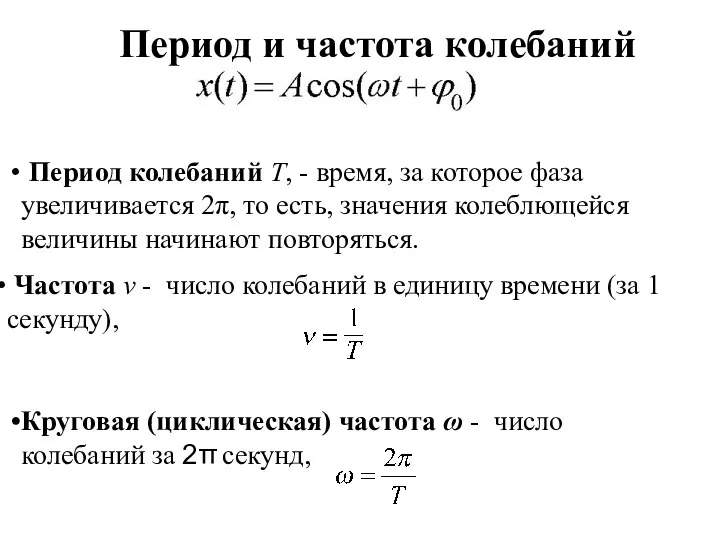
Период и частота колебаний
Частота v - число колебаний в единицу
Период и частота колебаний
Частота v - число колебаний в единицу
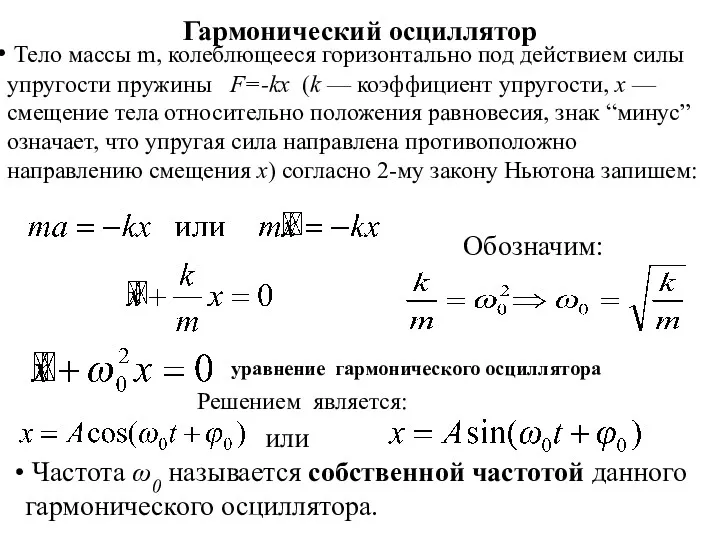
Гармонический осциллятор
Тело массы m, колеблющееся горизонтально под действием силы упругости
Гармонический осциллятор
Тело массы m, колеблющееся горизонтально под действием силы упругости
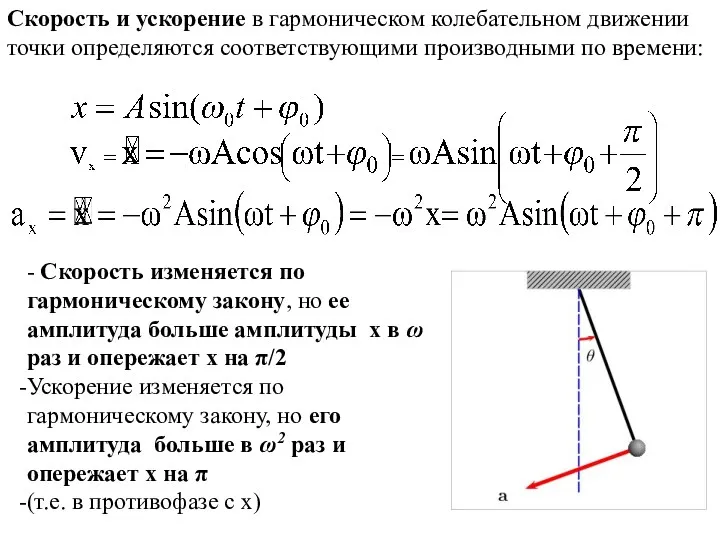
Скорость и ускорение в гармоническом колебательном движении точки определяются соответствующими производными
Скорость и ускорение в гармоническом колебательном движении точки определяются соответствующими производными

Способы представления гармонических колебаний
а) аналитический: х =аsin(ωt+α)
б) графический:
Способы представления гармонических колебаний
а) аналитический: х =аsin(ωt+α)
б) графический:
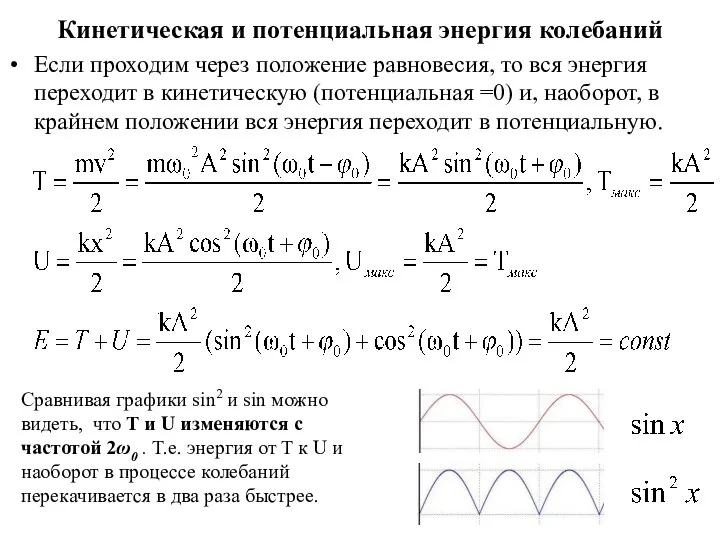
Кинетическая и потенциальная энергия колебаний
Если проходим через положение равновесия, то вся
Кинетическая и потенциальная энергия колебаний
Если проходим через положение равновесия, то вся
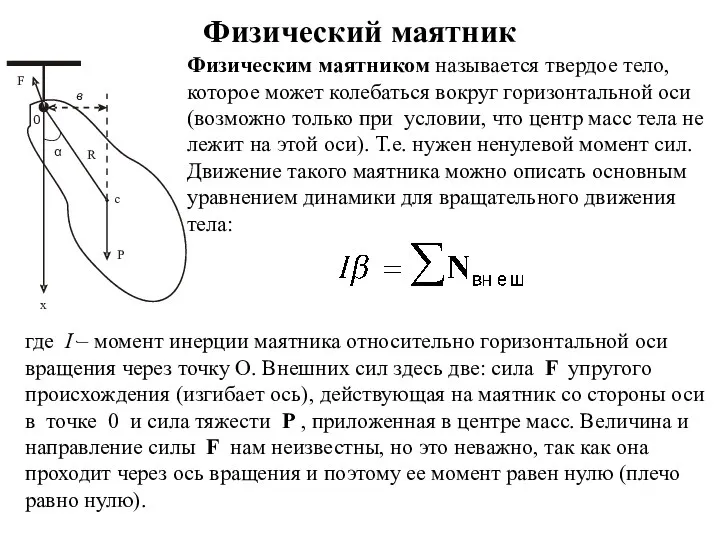
Физический маятник
Физическим маятником называется твердое тело, которое может колебаться вокруг
Физический маятник
Физическим маятником называется твердое тело, которое может колебаться вокруг

Физический маятник
Канонический вид уравнения:
расстояние от неподвижной точки (крепления маятника) до центра
Физический маятник
Канонический вид уравнения:
расстояние от неподвижной точки (крепления маятника) до центра
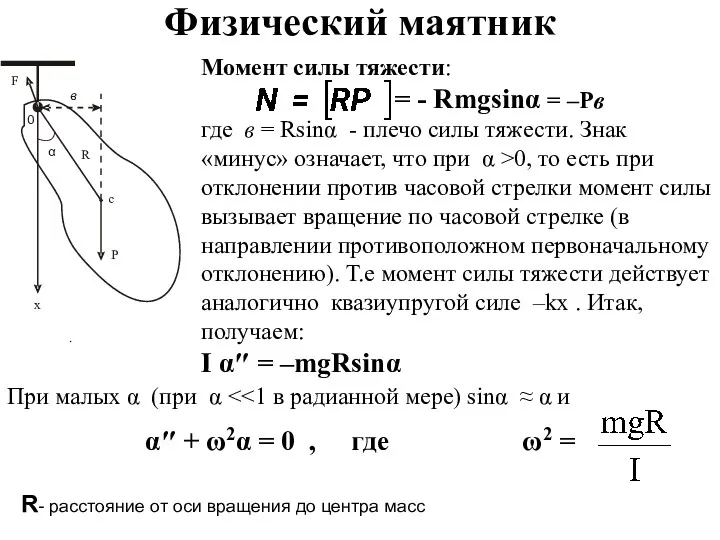
Физический маятник
Момент силы тяжести:
= - Rmgsinα = –Pв
где в
Физический маятник
Момент силы тяжести:
= - Rmgsinα = –Pв
где в
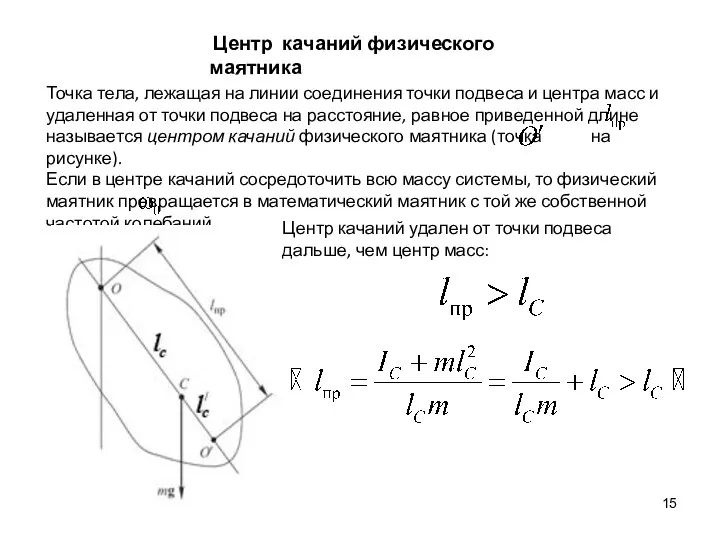
Центр качаний физического маятника
Точка тела, лежащая на линии соединения точки
Центр качаний физического маятника
Точка тела, лежащая на линии соединения точки
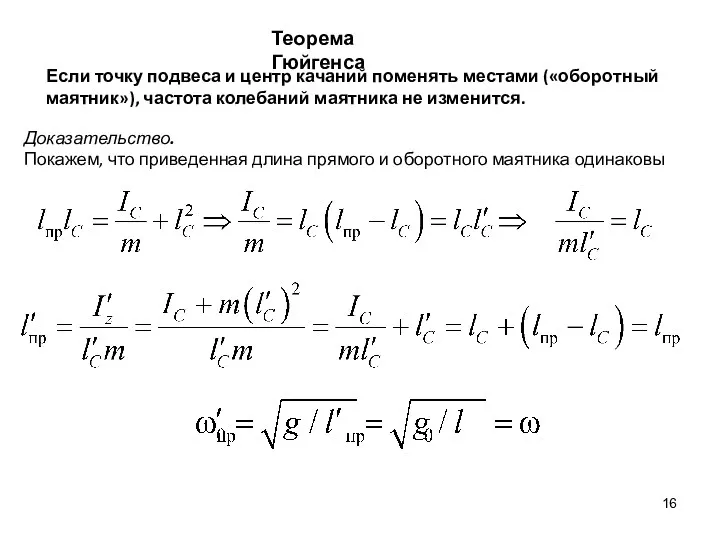
Теорема Гюйгенса
Если точку подвеса и центр качаний поменять местами («оборотный маятник»),
Теорема Гюйгенса
Если точку подвеса и центр качаний поменять местами («оборотный маятник»),
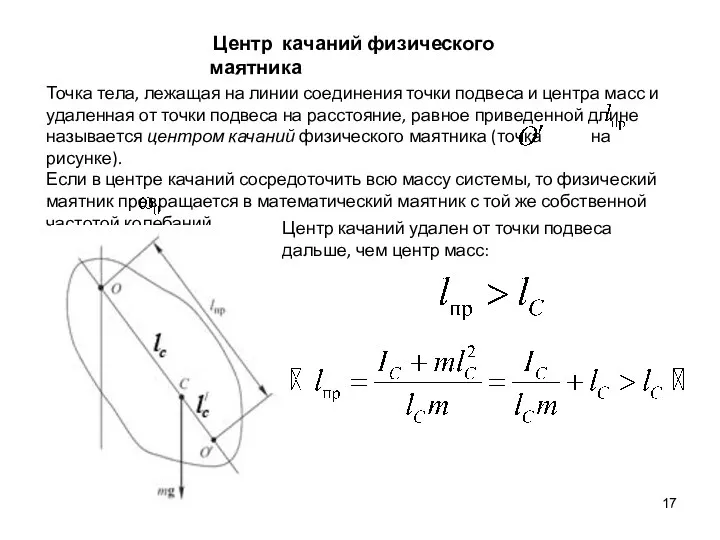
Центр качаний физического маятника
Точка тела, лежащая на линии соединения точки
Центр качаний физического маятника
Точка тела, лежащая на линии соединения точки
Физический маятник
В результате имеем дифференциальное уравнение гармонических колебаний, решением которого как
Физический маятник
В результате имеем дифференциальное уравнение гармонических колебаний, решением которого как
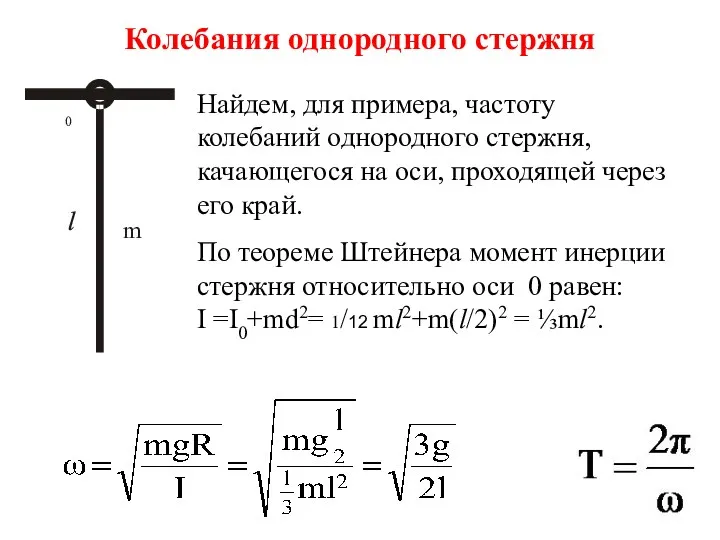
Колебания однородного стержня
Найдем, для примера, частоту колебаний однородного стержня, качающегося на
Колебания однородного стержня
Найдем, для примера, частоту колебаний однородного стержня, качающегося на
Математический маятник
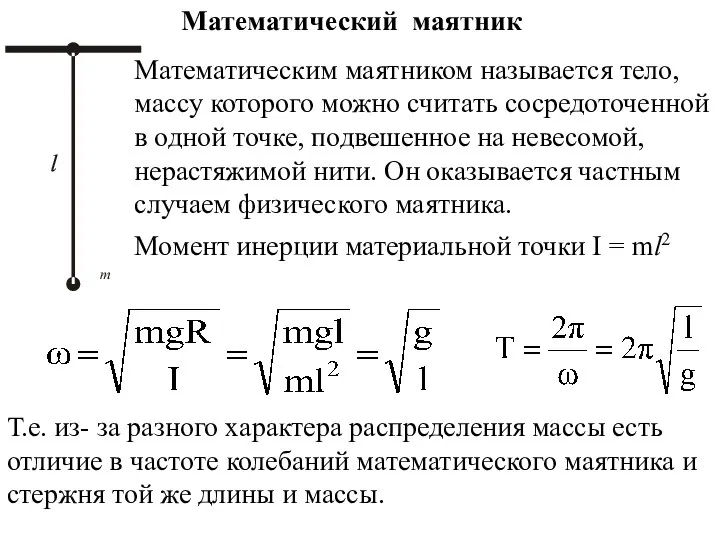
Математическим маятником называется тело, массу которого можно считать сосредоточенной
Математический маятник
Математическим маятником называется тело, массу которого можно считать сосредоточенной
Математический маятник
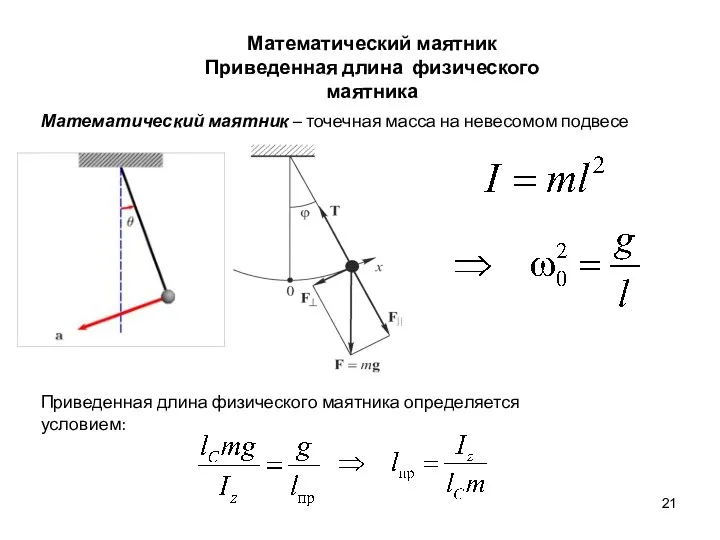
Приведенная длина физического маятника
Математический маятник – точечная масса на невесомом
Математический маятник
Приведенная длина физического маятника
Математический маятник – точечная масса на невесомом
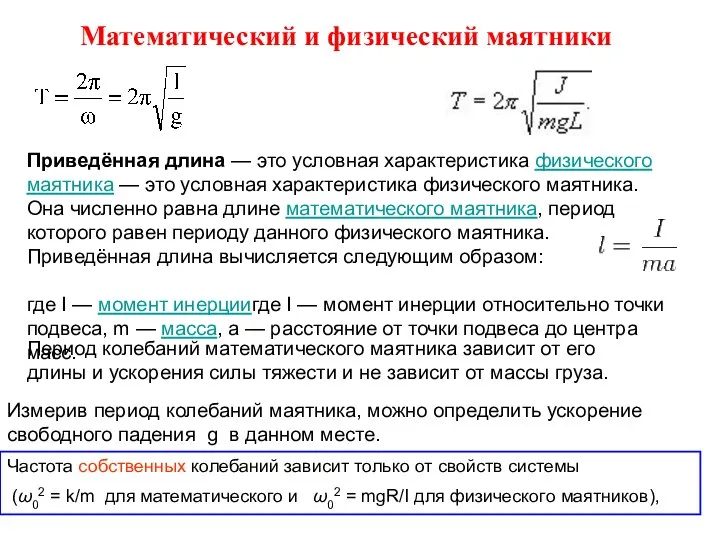
Измерив период колебаний маятника, можно определить ускорение свободного падения g в
Измерив период колебаний маятника, можно определить ускорение свободного падения g в
Превращения энергии при колебаниях
Пружинный маятник.
В процессе колебаний происходит превращение кинетической
Превращения энергии при колебаниях
Пружинный маятник.
В процессе колебаний происходит превращение кинетической
Затухающие колебания
Если нельзя пренебрегать сопротивлением среды при записи 2-го
Затухающие колебания
Если нельзя пренебрегать сопротивлением среды при записи 2-го
Затухающие колебания
Обозначим: (как и ранее) и
дифференциальное уравнение затухающих колебаний:
Решение
Затухающие колебания
Обозначим: (как и ранее) и
дифференциальное уравнение затухающих колебаний:
Решение
Декремент затухания
Быстроту затухания описывают также с помощью декремента затухания
Декремент затухания
Быстроту затухания описывают также с помощью декремента затухания
Апериодическое движение
В результате учета сопротивления среды получаются синусоидальные колебания с убывающей
Апериодическое движение
В результате учета сопротивления среды получаются синусоидальные колебания с убывающей
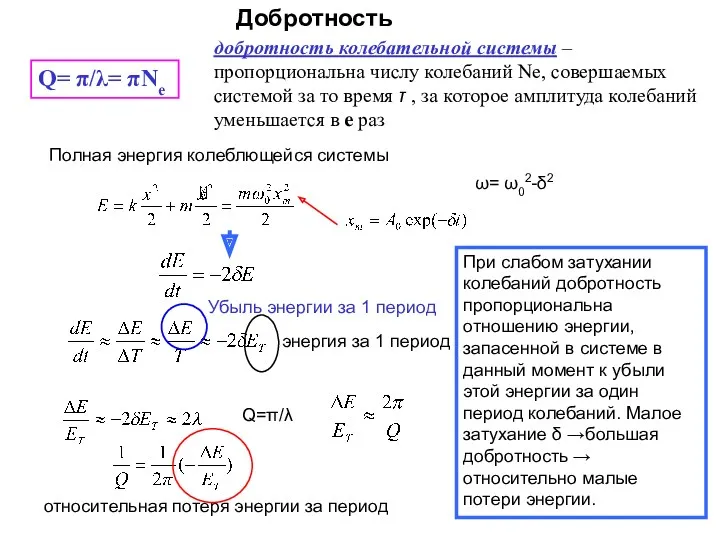
Добротность
Q= π/λ= πNe
добротность колебательной системы – пропорциональна числу колебаний Ne,
Добротность
Q= π/λ= πNe
добротность колебательной системы – пропорциональна числу колебаний Ne,
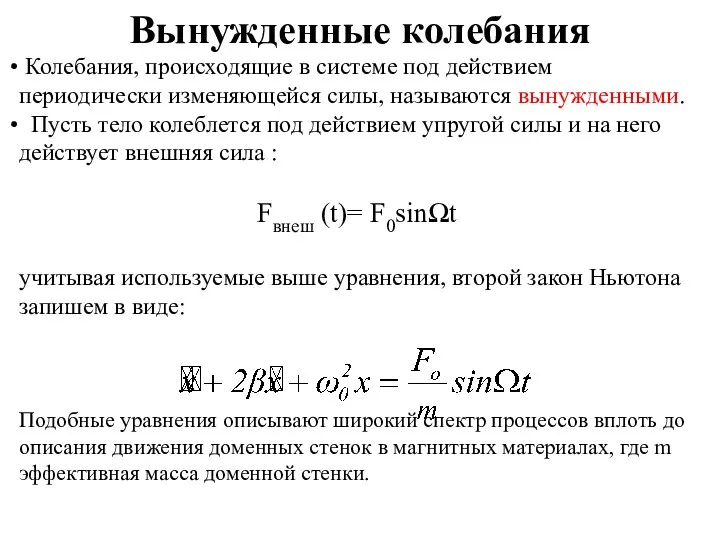
Вынужденные колебания
Колебания, происходящие в системе под действием периодически изменяющейся
Вынужденные колебания
Колебания, происходящие в системе под действием периодически изменяющейся
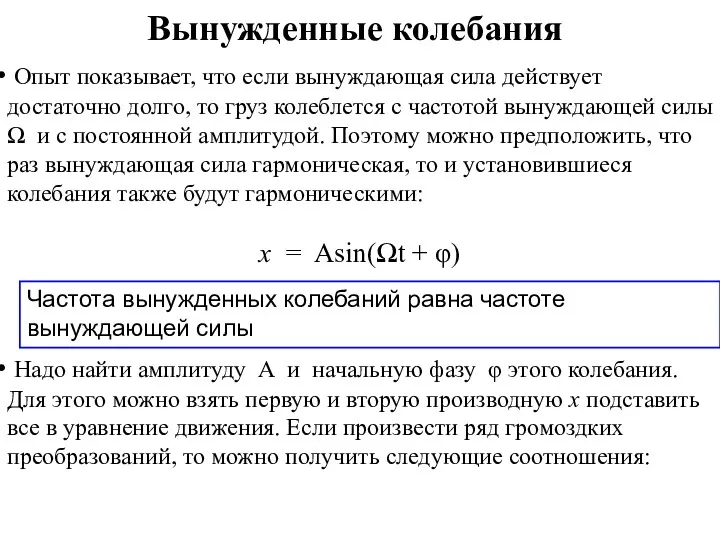
Вынужденные колебания
Опыт показывает, что если вынуждающая сила действует достаточно долго,
Вынужденные колебания
Опыт показывает, что если вынуждающая сила действует достаточно долго,
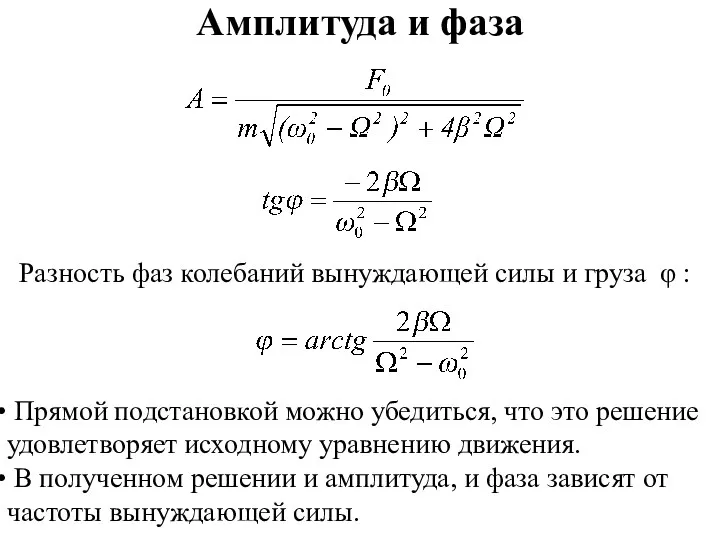
Амплитуда и фаза
Разность фаз колебаний вынуждающей силы и груза φ :
Амплитуда и фаза
Разность фаз колебаний вынуждающей силы и груза φ :
Резонанс
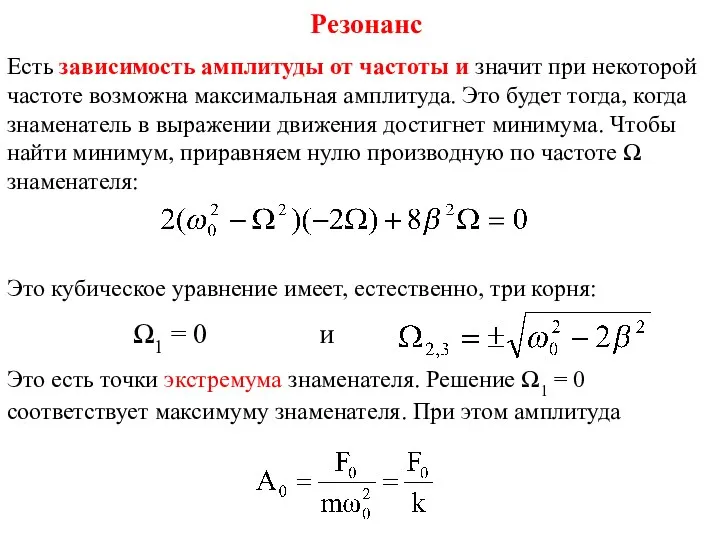
Есть зависимость амплитуды от частоты и значит при некоторой частоте
Резонанс
Есть зависимость амплитуды от частоты и значит при некоторой частоте
Резонансная частота
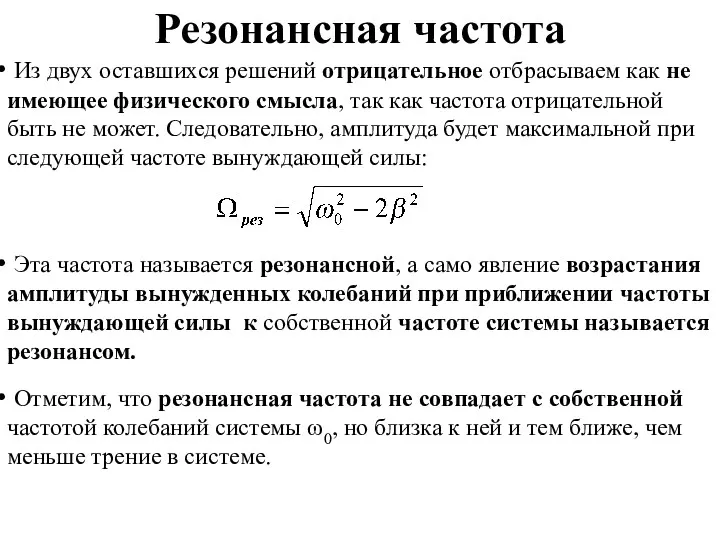
Из двух оставшихся решений отрицательное отбрасываем как не имеющее
Резонансная частота
Из двух оставшихся решений отрицательное отбрасываем как не имеющее
Резонансные кривые
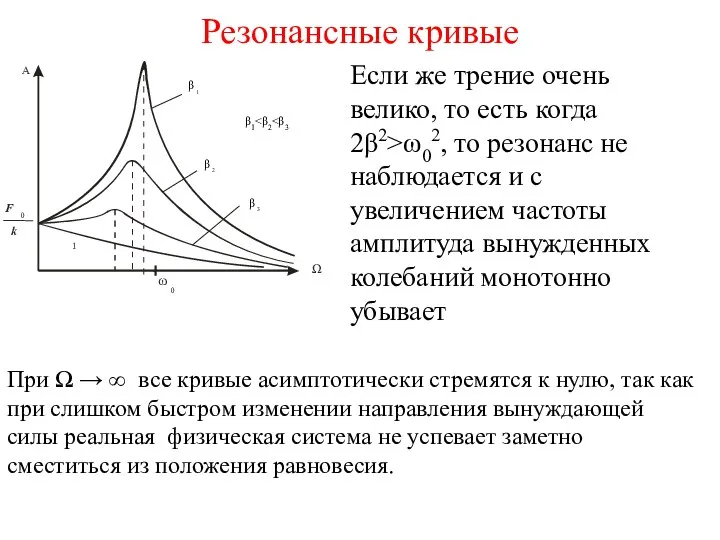
Если же трение очень велико, то есть когда 2β2>ω02, то
Резонансные кривые
Если же трение очень велико, то есть когда 2β2>ω02, то
Добротность показывает во сколько раз амплитуда в момент резонанса превышает смещение
Добротность показывает во сколько раз амплитуда в момент резонанса превышает смещение
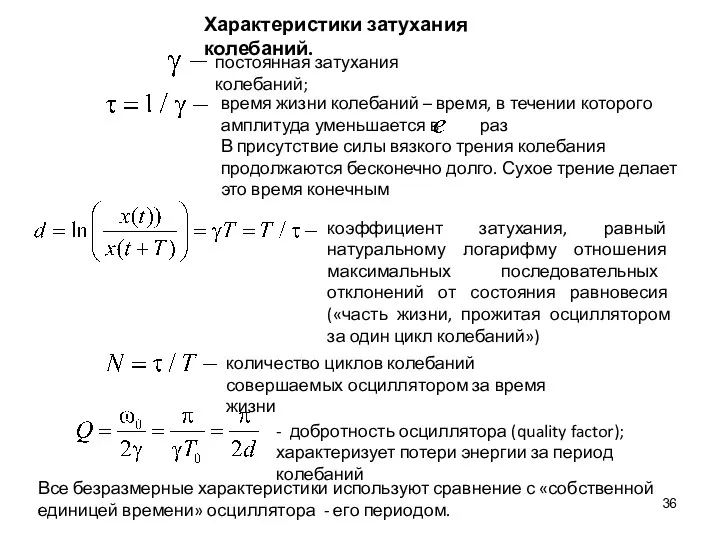
Характеристики затухания колебаний.
постоянная затухания колебаний;
время жизни колебаний – время, в течении
Характеристики затухания колебаний.
постоянная затухания колебаний;
время жизни колебаний – время, в течении
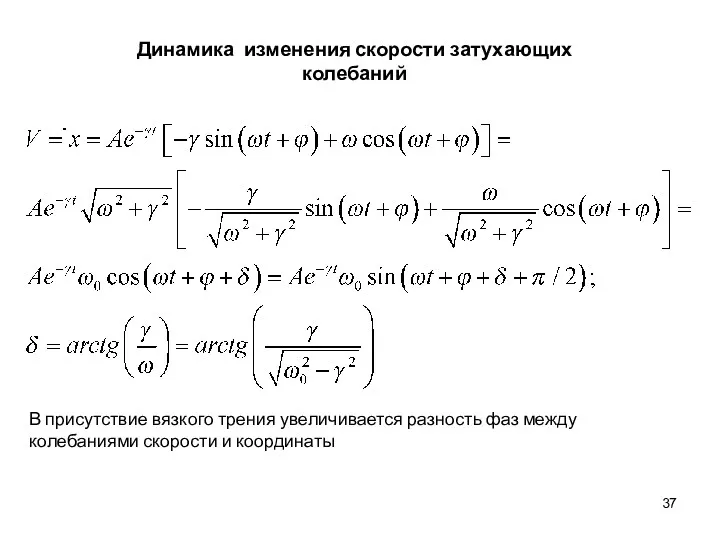
Динамика изменения скорости затухающих колебаний
В присутствие вязкого трения увеличивается разность фаз
Динамика изменения скорости затухающих колебаний
В присутствие вязкого трения увеличивается разность фаз
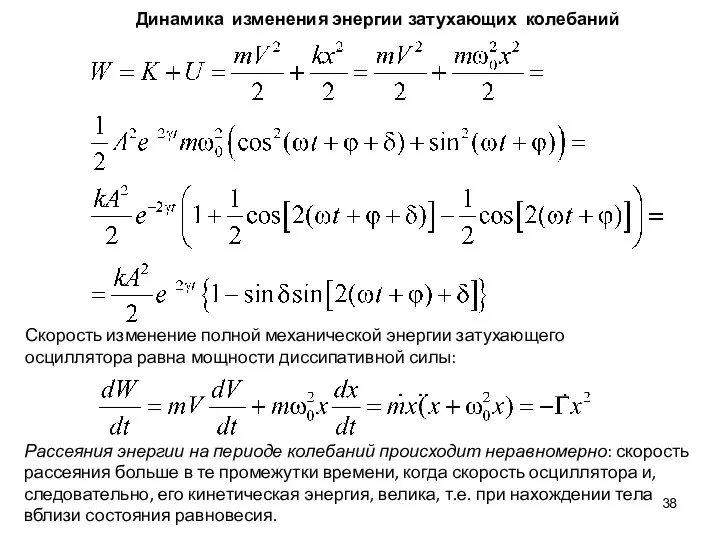
Динамика изменения энергии затухающих колебаний
Скорость изменение полной механической энергии затухающего осциллятора
Динамика изменения энергии затухающих колебаний
Скорость изменение полной механической энергии затухающего осциллятора
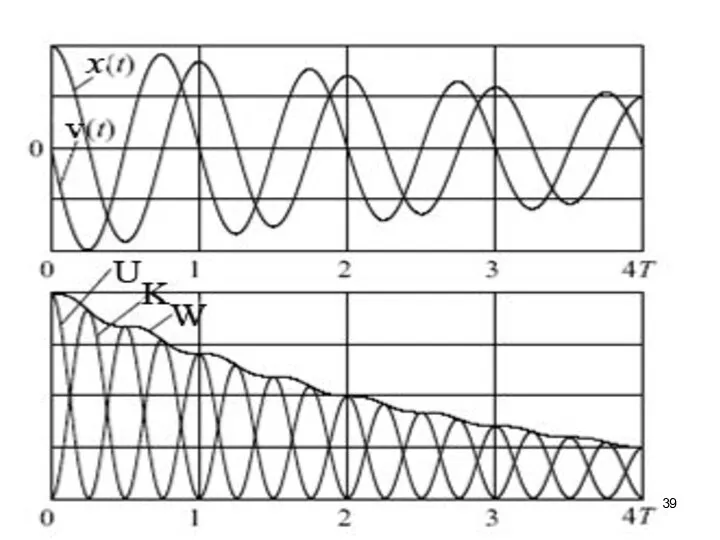
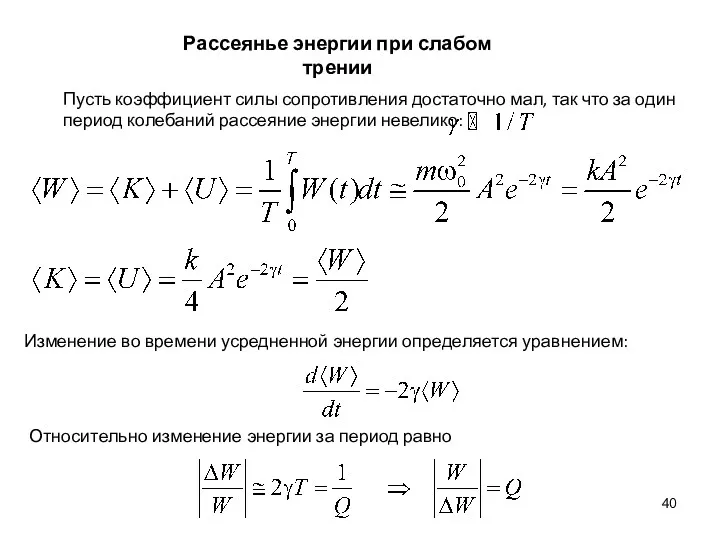
Рассеянье энергии при слабом трении
Пусть коэффициент силы сопротивления достаточно мал, так
Рассеянье энергии при слабом трении
Пусть коэффициент силы сопротивления достаточно мал, так
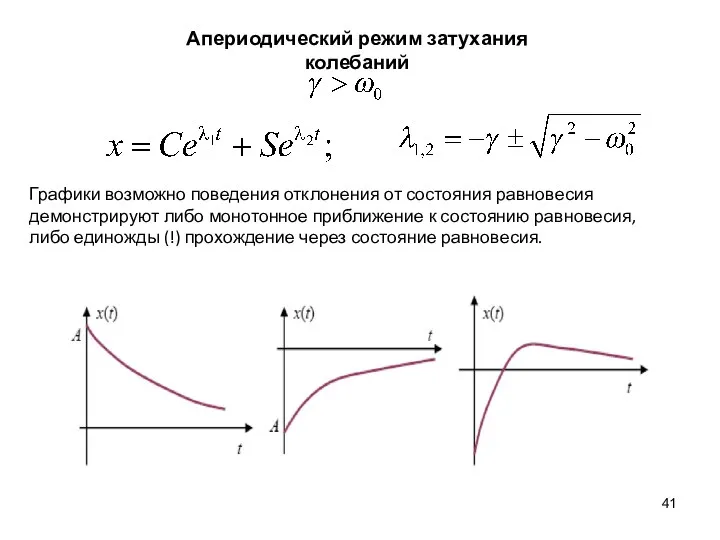
Апериодический режим затухания колебаний
Графики возможно поведения отклонения от состояния равновесия демонстрируют
Апериодический режим затухания колебаний
Графики возможно поведения отклонения от состояния равновесия демонстрируют
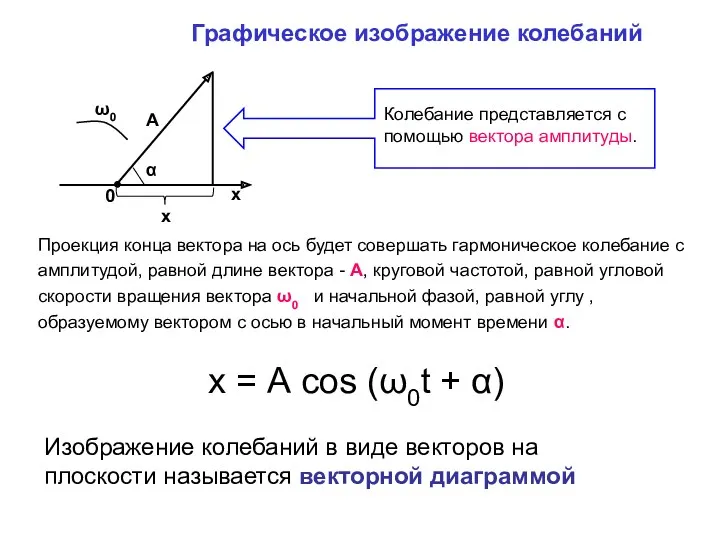
Графическое изображение колебаний
Колебание представляется с помощью вектора амплитуды.
Проекция конца вектора на
Графическое изображение колебаний
Колебание представляется с помощью вектора амплитуды.
Проекция конца вектора на
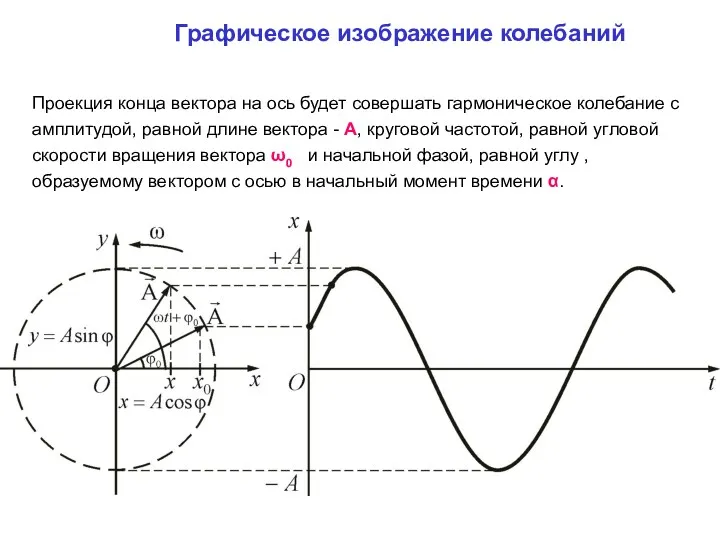
Графическое изображение колебаний
Проекция конца вектора на ось будет совершать гармоническое колебание
Графическое изображение колебаний
Проекция конца вектора на ось будет совершать гармоническое колебание
Сложение колебаний
Колеблющееся тело может участвовать в нескольких колебательных процессах, тогда необходимо
Сложение колебаний
Колеблющееся тело может участвовать в нескольких колебательных процессах, тогда необходимо
Сложение колебаний
А1 и А2- амплитуды складываемых колебаний под углами φ1 и
Сложение колебаний
А1 и А2- амплитуды складываемых колебаний под углами φ1 и
![Проанализируем выражение для амплитуды. А2=А12+А22-2А1А2cos[π-(α2-α1)]= А12+А22+2А1А2cos(α2-α1) 1)Если разность фаз обоих](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/598585/slide-45.jpg)
Проанализируем выражение для амплитуды.
А2=А12+А22-2А1А2cos[π-(α2-α1)]= А12+А22+2А1А2cos(α2-α1)
1)Если разность фаз обоих колебаний (φ2-
Проанализируем выражение для амплитуды.
А2=А12+А22-2А1А2cos[π-(α2-α1)]= А12+А22+2А1А2cos(α2-α1)
1)Если разность фаз обоих колебаний (φ2-
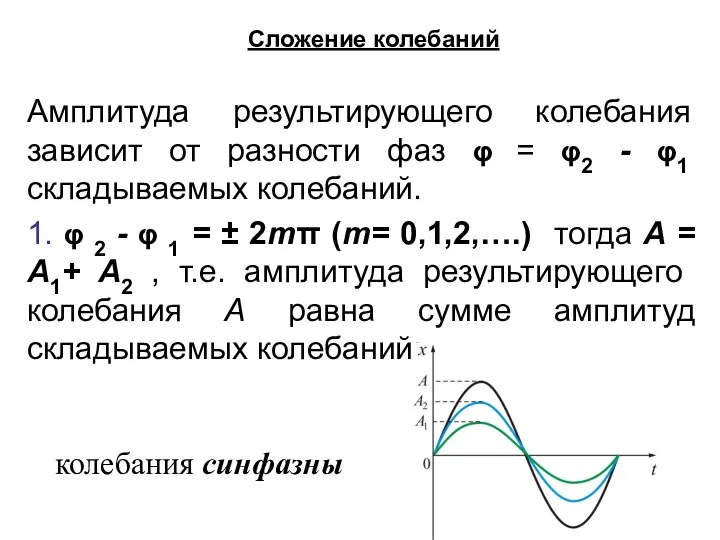
Амплитуда результирующего колебания зависит от разности фаз φ = φ2 -
Амплитуда результирующего колебания зависит от разности фаз φ = φ2 -
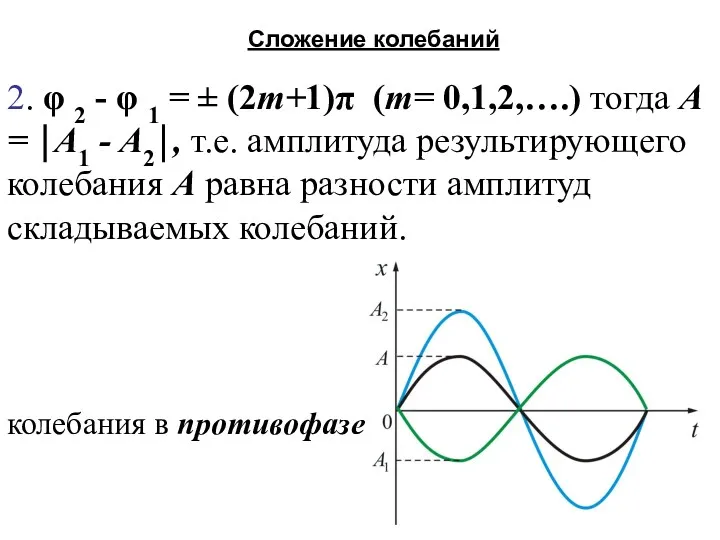
2. φ 2 - φ 1 = ± (2m+1)π (m= 0,1,2,….)
2. φ 2 - φ 1 = ± (2m+1)π (m= 0,1,2,….)
Для практики особый интерес представляет случай, когда два складываемых колебания одинакового
Для практики особый интерес представляет случай, когда два складываемых колебания одинакового
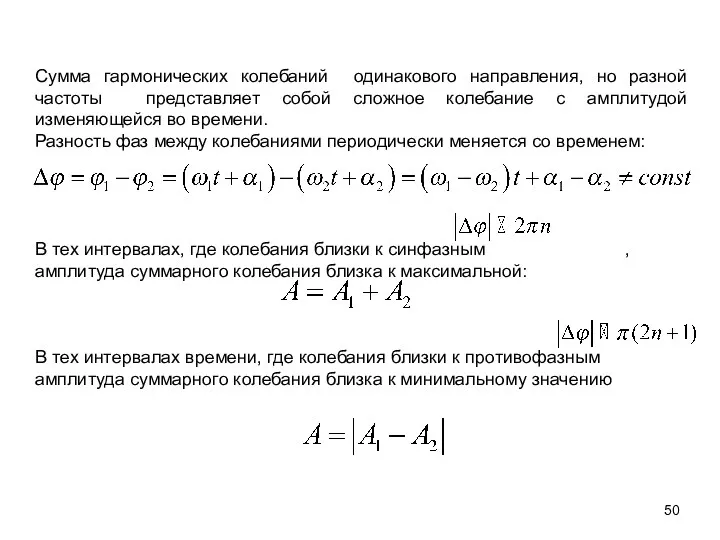
Сумма гармонических колебаний одинакового направления, но разной частоты представляет собой сложное
Сумма гармонических колебаний одинакового направления, но разной частоты представляет собой сложное
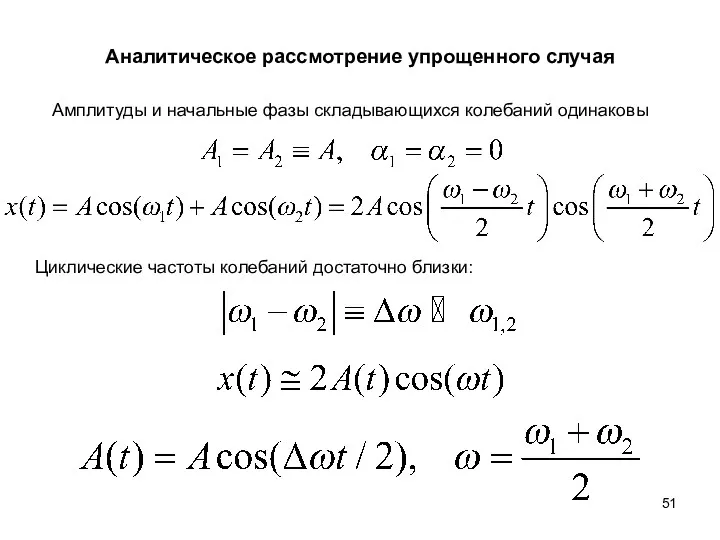
Аналитическое рассмотрение упрощенного случая
Амплитуды и начальные фазы складывающихся колебаний одинаковы
Циклические частоты
Аналитическое рассмотрение упрощенного случая
Амплитуды и начальные фазы складывающихся колебаний одинаковы
Циклические частоты
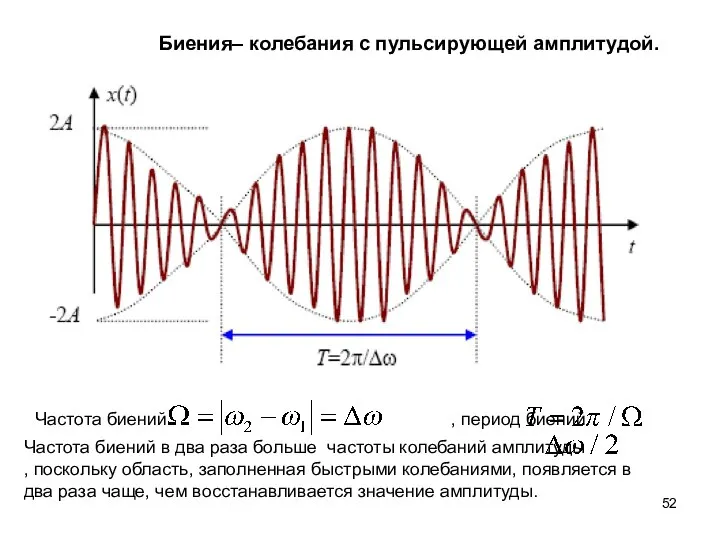
Биения– колебания с пульсирующей амплитудой.
Частота биений , период биений
Частота
Биения– колебания с пульсирующей амплитудой.
Частота биений , период биений
Частота
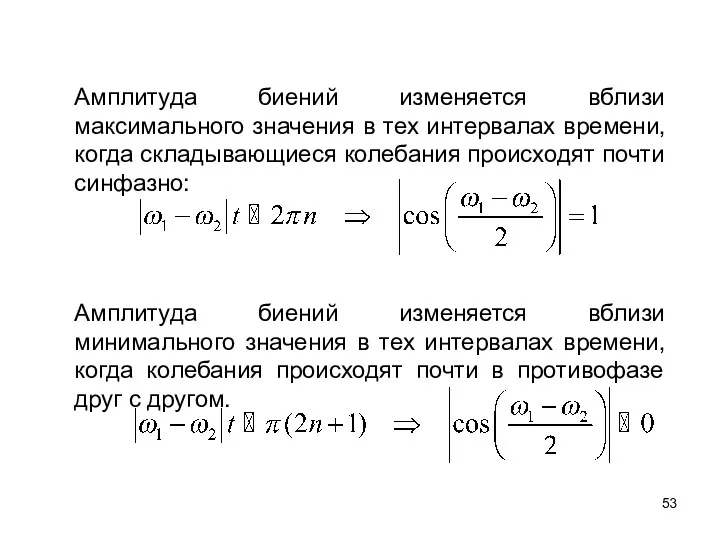
Амплитуда биений изменяется вблизи максимального значения в тех интервалах времени, когда
Амплитуда биений изменяется вблизи максимального значения в тех интервалах времени, когда
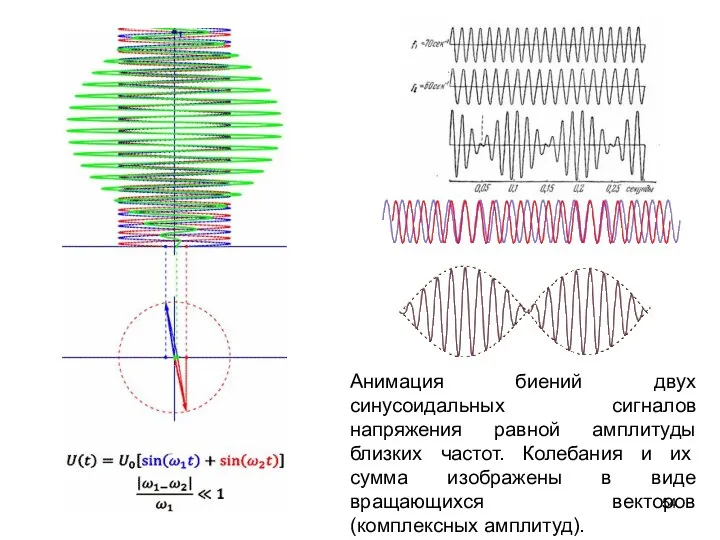
Анимация биений двух синусоидальных сигналов напряжения равной амплитуды близких частот. Колебания
Анимация биений двух синусоидальных сигналов напряжения равной амплитуды близких частот. Колебания
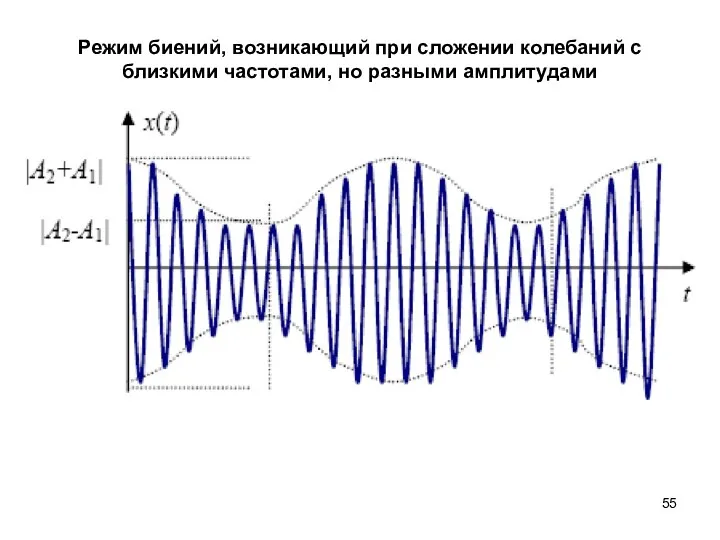
Режим биений, возникающий при сложении колебаний с близкими частотами, но разными
Режим биений, возникающий при сложении колебаний с близкими частотами, но разными
В общем случае, колебательное движение с изменяющейся во времени амплитудой называется
В общем случае, колебательное движение с изменяющейся во времени амплитудой называется
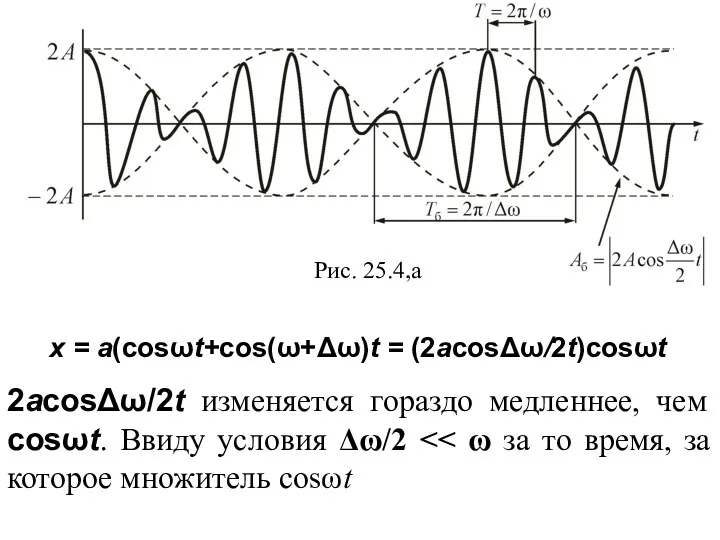
Рис. 25.4,a
2аcosΔω/2t изменяется гораздо медленнее, чем cosωt. Ввиду условия Δω/2 <<
Рис. 25.4,a
2аcosΔω/2t изменяется гораздо медленнее, чем cosωt. Ввиду условия Δω/2 <<
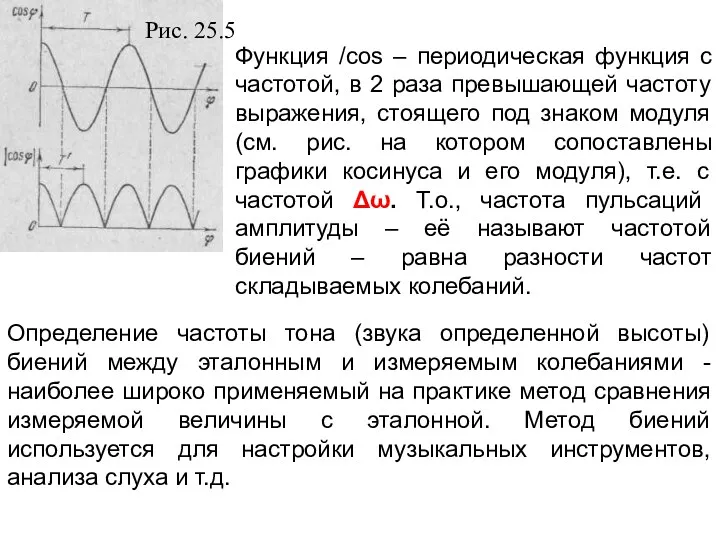
Функция /cos – периодическая функция с частотой, в 2 раза превышающей
Функция /cos – периодическая функция с частотой, в 2 раза превышающей
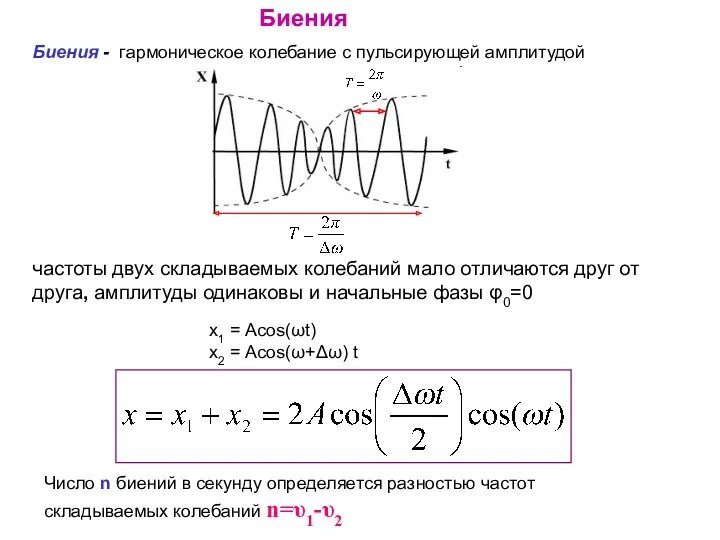
Биения
Биения - гармоническое колебание с пульсирующей амплитудой
частоты двух складываемых колебаний
Биения
Биения - гармоническое колебание с пульсирующей амплитудой
частоты двух складываемых колебаний

Сложение взаимно ортогональных колебаний
Сложение взаимно ортогональных колебаний
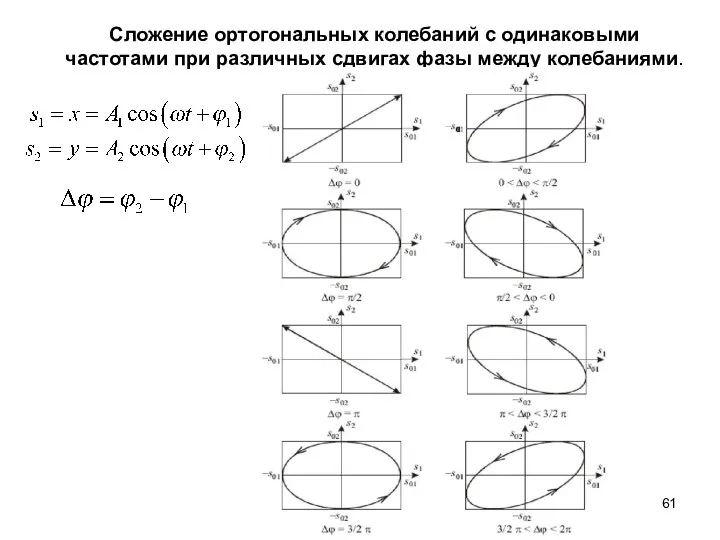
Сложение ортогональных колебаний с одинаковыми частотами при различных сдвигах фазы между
Сложение ортогональных колебаний с одинаковыми частотами при различных сдвигах фазы между
 Механическая работа. Мощность
Механическая работа. Мощность Балка на упругом основании
Балка на упругом основании Измерение удельной теплоёмкости твердого тела
Измерение удельной теплоёмкости твердого тела Рідкі кристали та їх властивості
Рідкі кристали та їх властивості Электроприборы в быту
Электроприборы в быту Техническое обслуживание и текущий ремонт систем электроснабжения автомобиля
Техническое обслуживание и текущий ремонт систем электроснабжения автомобиля Подшипники качения
Подшипники качения Свисты-волны ОНЧ диапазона (1-30 кГц) в магнитосфере
Свисты-волны ОНЧ диапазона (1-30 кГц) в магнитосфере Общие сведения о механических передачах
Общие сведения о механических передачах Биофизика мембранных процессов. Мембранный транспорт
Биофизика мембранных процессов. Мембранный транспорт Основные понятия непотопляемости
Основные понятия непотопляемости Diodo shockley
Diodo shockley Направление тока и направление линий его магнитного поля. Сила Ампера
Направление тока и направление линий его магнитного поля. Сила Ампера Технологии на квантовых эффектах
Технологии на квантовых эффектах Физика - наука о природе
Физика - наука о природе Расчет линейных разветвленных цепей
Расчет линейных разветвленных цепей Определение эдс и внутреннего сопротивления источника тока
Определение эдс и внутреннего сопротивления источника тока Передаточна функція систем автоматики. Стуктурно-динамічні схеми систем автоматики та їх перетворення
Передаточна функція систем автоматики. Стуктурно-динамічні схеми систем автоматики та їх перетворення Диэлектриктегі физикалық процесс. Диэлектрлік шығындар және диэлектриктардың тесілуі
Диэлектриктегі физикалық процесс. Диэлектрлік шығындар және диэлектриктардың тесілуі Теории прочности
Теории прочности Цепные передачи
Цепные передачи Тонкослойная хроматография
Тонкослойная хроматография Урок Лист Успеха Работа и мощность 7 класс
Урок Лист Успеха Работа и мощность 7 класс Акустика. Затухание волн
Акустика. Затухание волн Сферические зеркала.Ход лучей в призме, плоскопараллельной пластине
Сферические зеркала.Ход лучей в призме, плоскопараллельной пластине Радиометрия и спектрометрия ионизирующих излучений. (Лекция 9)
Радиометрия и спектрометрия ионизирующих излучений. (Лекция 9) Понятия отверстие и вал
Понятия отверстие и вал Інерція та інертність. Маса та імпульс тіла. Другий закон Ньютона
Інерція та інертність. Маса та імпульс тіла. Другий закон Ньютона