- Лазерное сканирование в строительстве (ЛС)

Содержание
- 2. Общее положение Приборы используемые в лазерном сканировании Программное обеспечение для обработки результатов лазерного сканирования Заключение Блоки
- 3. Блок 1 Общее положение
- 4. Лазерное, как и 3D сканирование берет свое начало очень давно, еще во второй половине 20-го века.
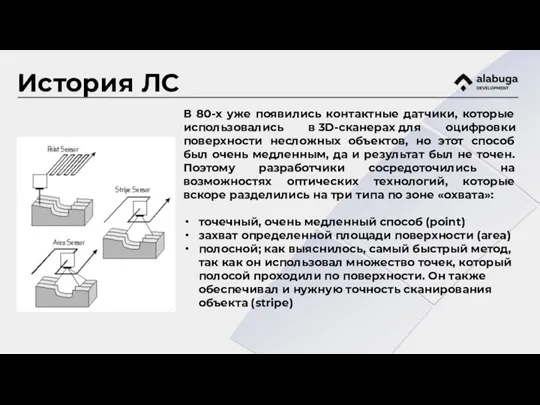
- 5. История ЛС В 80-х уже появились контактные датчики, которые использовались в 3D-сканерах для оцифровки поверхности несложных
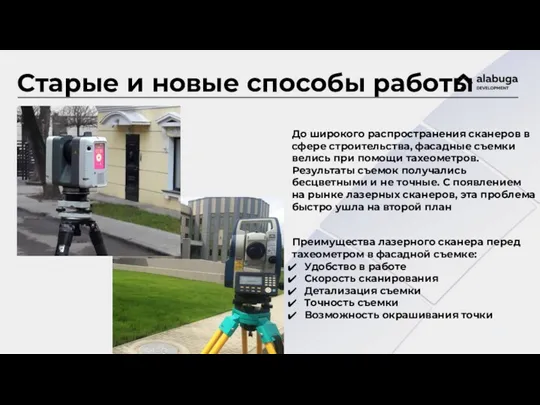
- 6. Старые и новые способы работы До широкого распространения сканеров в сфере строительства, фасадные съемки велись при
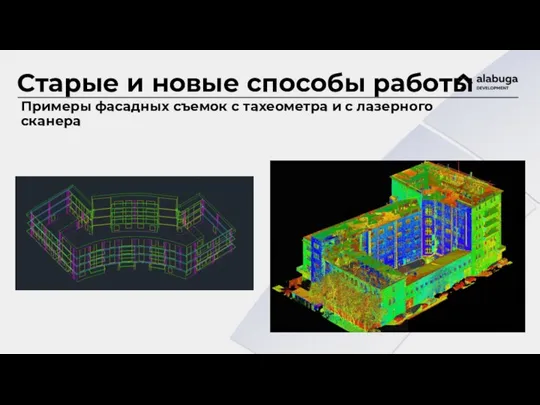
- 7. Старые и новые способы работы Примеры фасадных съемок с тахеометра и с лазерного сканера
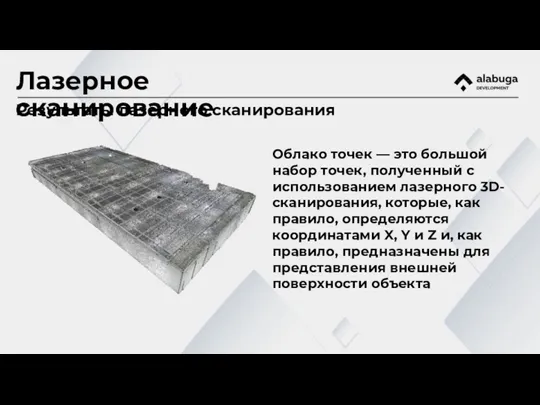
- 8. Лазерное сканирование Результаты лазерного сканирования Облако точек — это большой набор точек, полученный с использованием лазерного
- 9. Блок 2 Приборы используемые в лазерном сканировании
- 10. Приборы используемые в ЛС Какие приборы используется в нашей работе Для произведения лазерного сканирования в нашей
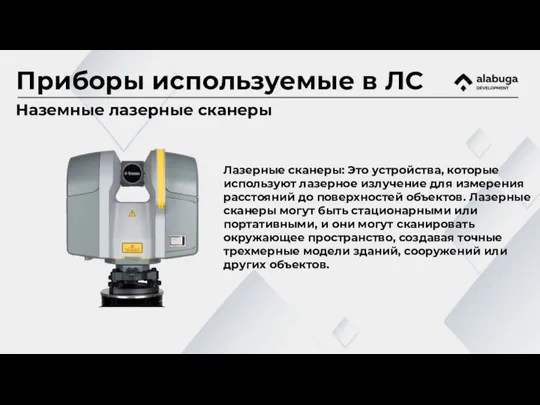
- 11. Приборы используемые в ЛС Наземные лазерные сканеры Лазерные сканеры: Это устройства, которые используют лазерное излучение для
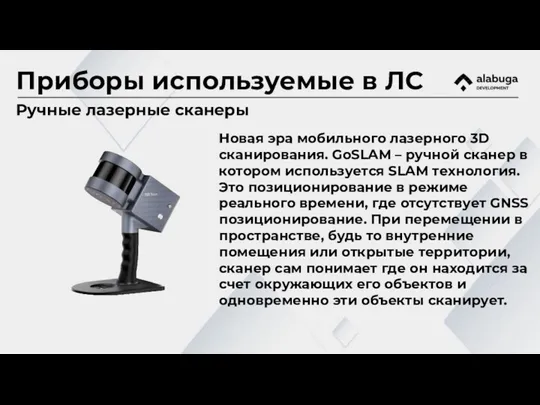
- 12. Приборы используемые в ЛС Ручные лазерные сканеры Новая эра мобильного лазерного 3D сканирования. GoSLAM – ручной
- 13. Приборы используемые в ЛС Квадрокоптеры Квадрокоптеры, они же, если брать шире - фотограмметрические системы: Это системы,
- 14. Приборы используемые в ЛС В своей работе мы используем - Наземный лазерный сканер – Leica RTC
- 15. Приборы используемые в ЛС Наземные лазерный сканер Leica RTC 360 Мин./Макс. дальность сканирования: 0.5м/~130 м Скорость
- 16. Приборы используемые в ЛС Ручной лазерный сканер GoSLAM Макс. Дальность сканирования: ~120 м Точность измерений: 1
- 17. Приборы используемые в ЛС Квадрокоптер Matrice 300 RTK Размеры квадрокоптера: 810х670х430 мм (в развернутом состоянии без
- 18. Приборы используемые в ЛС Камера для квадрокоптера DJI Zenmuse L1 Лидар Характеристики: Скорость съемки: 480 000
- 19. Приборы используемые в ЛС Камера для квадрокоптера DJI Zenmuse P1 для фотограмметрии Характеристики: Точность измерений: 3
- 20. Блок 3 Программное обеспечение используемое в лазерном сканировании
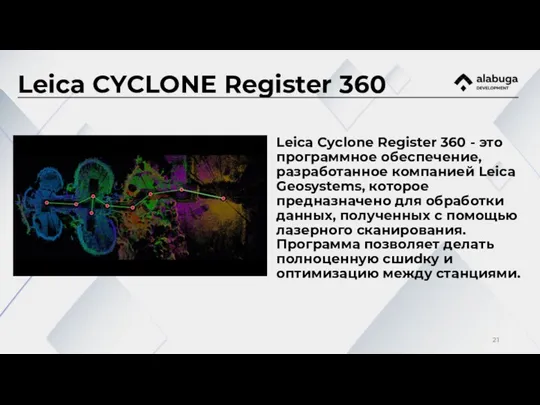
- 21. Leica CYCLONE Register 360 Leica Cyclone Register 360 - это программное обеспечение, разработанное компанией Leica Geosystems,
- 22. Leica CYCLONE 3DR Программа Leica Cyclone 3DR предназначена для обработки и анализа данных, полученных с помощью
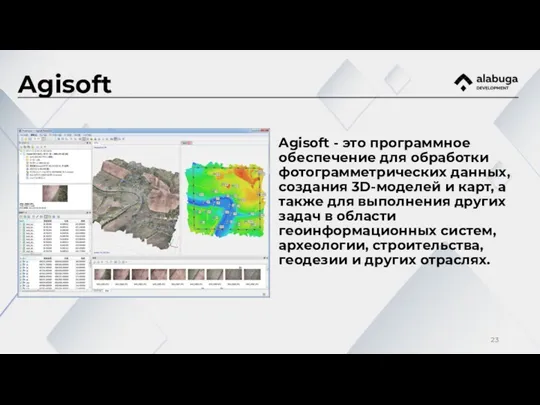
- 23. Аgisoft Agisoft - это программное обеспечение для обработки фотограмметрических данных, создания 3D-моделей и карт, а также
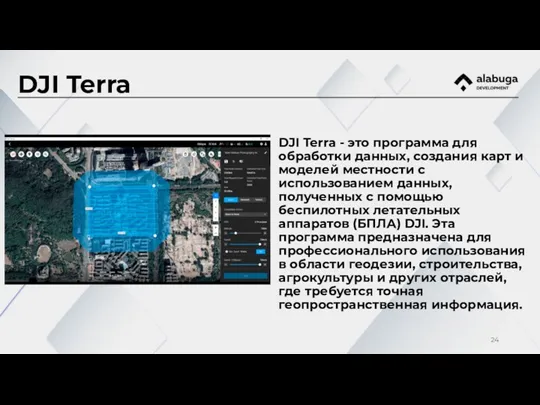
- 24. DJI Terra DJI Terra - это программа для обработки данных, создания карт и моделей местности с
- 26. Скачать презентацию
Общее положение
Приборы используемые в лазерном сканировании
Программное обеспечение для обработки результатов лазерного
Общее положение
Приборы используемые в лазерном сканировании
Программное обеспечение для обработки результатов лазерного
Блок 1
Общее положение
Блок 1
Общее положение
Лазерное, как и 3D сканирование берет свое начало очень давно, еще
Лазерное, как и 3D сканирование берет свое начало очень давно, еще
История ЛС
В 80-х уже появились контактные датчики, которые использовались в 3D-сканерах для оцифровки
История ЛС
В 80-х уже появились контактные датчики, которые использовались в 3D-сканерах для оцифровки
Старые и новые способы работы
До широкого распространения сканеров в сфере строительства,
Старые и новые способы работы
До широкого распространения сканеров в сфере строительства,
Старые и новые способы работы
Примеры фасадных съемок с тахеометра и с
Старые и новые способы работы
Примеры фасадных съемок с тахеометра и с
Лазерное сканирование
Результаты лазерного сканирования
Облако точек — это большой набор точек, полученный
Лазерное сканирование
Результаты лазерного сканирования
Облако точек — это большой набор точек, полученный
Блок 2
Приборы используемые в лазерном сканировании
Блок 2
Приборы используемые в лазерном сканировании

Приборы используемые в ЛС
Какие приборы используется в нашей работе
Для произведения лазерного
Приборы используемые в ЛС
Какие приборы используется в нашей работе
Для произведения лазерного
Приборы используемые в ЛС
Наземные лазерные сканеры
Лазерные сканеры: Это устройства, которые используют
Приборы используемые в ЛС
Наземные лазерные сканеры
Лазерные сканеры: Это устройства, которые используют
Приборы используемые в ЛС
Ручные лазерные сканеры
Новая эра мобильного лазерного 3D сканирования.
Приборы используемые в ЛС
Ручные лазерные сканеры
Новая эра мобильного лазерного 3D сканирования.

Приборы используемые в ЛС
Квадрокоптеры
Квадрокоптеры, они же, если брать шире - фотограмметрические
Приборы используемые в ЛС
Квадрокоптеры
Квадрокоптеры, они же, если брать шире - фотограмметрические

Приборы используемые в ЛС
В своей работе мы используем
- Наземный лазерный сканер
Приборы используемые в ЛС
В своей работе мы используем
- Наземный лазерный сканер

Приборы используемые в ЛС
Наземные лазерный сканер Leica RTC 360
Мин./Макс. дальность сканирования:
Приборы используемые в ЛС
Наземные лазерный сканер Leica RTC 360
Мин./Макс. дальность сканирования:

Приборы используемые в ЛС
Ручной лазерный сканер GoSLAM
Макс. Дальность сканирования: ~120 м
Точность
Приборы используемые в ЛС
Ручной лазерный сканер GoSLAM
Макс. Дальность сканирования: ~120 м
Точность

Приборы используемые в ЛС
Квадрокоптер Matrice 300 RTK
Размеры квадрокоптера: 810х670х430 мм (в
Приборы используемые в ЛС
Квадрокоптер Matrice 300 RTK
Размеры квадрокоптера: 810х670х430 мм (в

Приборы используемые в ЛС
Камера для квадрокоптера DJI Zenmuse L1 Лидар
Характеристики:
Скорость съемки:
Приборы используемые в ЛС
Камера для квадрокоптера DJI Zenmuse L1 Лидар
Характеристики:
Скорость съемки:

Приборы используемые в ЛС
Камера для квадрокоптера DJI Zenmuse P1 для фотограмметрии
Характеристики:
Точность
Приборы используемые в ЛС
Камера для квадрокоптера DJI Zenmuse P1 для фотограмметрии
Характеристики:
Точность
Блок 3
Программное обеспечение используемое в лазерном сканировании
Блок 3
Программное обеспечение используемое в лазерном сканировании
Leica CYCLONE Register 360
Leica Cyclone Register 360 - это программное обеспечение,
Leica CYCLONE Register 360
Leica Cyclone Register 360 - это программное обеспечение,
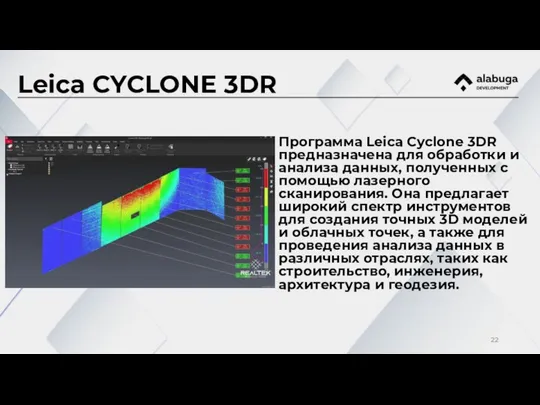
Leica CYCLONE 3DR
Программа Leica Cyclone 3DR предназначена для обработки и анализа
Leica CYCLONE 3DR
Программа Leica Cyclone 3DR предназначена для обработки и анализа
Аgisoft
Agisoft - это программное обеспечение для обработки фотограмметрических данных, создания 3D-моделей
Аgisoft
Agisoft - это программное обеспечение для обработки фотограмметрических данных, создания 3D-моделей
DJI Terra
DJI Terra - это программа для обработки данных, создания карт
DJI Terra
DJI Terra - это программа для обработки данных, создания карт
 Звук и его характеристики. (9 класс)
Звук и его характеристики. (9 класс) Электрический привод
Электрический привод Презентация. Учимся строить векторные диаграммы. Часть 2
Презентация. Учимся строить векторные диаграммы. Часть 2 Энтропия и вероятность. Статистический характер необратимых процессов
Энтропия и вероятность. Статистический характер необратимых процессов Виды теплопередач
Виды теплопередач Разработка урока по теме Звуковые волны. Что такое звук?
Разработка урока по теме Звуковые волны. Что такое звук? Основные методы получения наноструктурных материалов
Основные методы получения наноструктурных материалов Функциональная оптоэлектроника. УФЭ (6)
Функциональная оптоэлектроника. УФЭ (6) презентация урока
презентация урока Синтез нанослоев неорганических веществ методами ионно-коллоидного и коллоидного наслаивания. (Лекция 10)
Синтез нанослоев неорганических веществ методами ионно-коллоидного и коллоидного наслаивания. (Лекция 10) Неоднородное одномерное уравнение теплопроводности
Неоднородное одномерное уравнение теплопроводности Масса тела. Единицы массы
Масса тела. Единицы массы Уравнение состояния идеального газа
Уравнение состояния идеального газа Тренировочный тест. Уравнение состояния идеального газа
Тренировочный тест. Уравнение состояния идеального газа Схема связей между характеристиками материала
Схема связей между характеристиками материала Электромагнитная индукция
Электромагнитная индукция Види і принципи роботи малих джерел електричного струму та їх утилізація
Види і принципи роботи малих джерел електричного струму та їх утилізація Подготовка и проведение уроков различного типа на основе использования ЭОР. Предмет: Физика
Подготовка и проведение уроков различного типа на основе использования ЭОР. Предмет: Физика Электрические цепи. Параллельное и последовательное соединение проводников
Электрические цепи. Параллельное и последовательное соединение проводников Люменисцентті және электронды микроскопия
Люменисцентті және электронды микроскопия Работа и мощность электрического тока
Работа и мощность электрического тока Ионизирующие излучения
Ионизирующие излучения Допустимі навантаження на грунт. Методи кількісної оцінки ступеня стійкості укосів і схилів. (Лекція 8)
Допустимі навантаження на грунт. Методи кількісної оцінки ступеня стійкості укосів і схилів. (Лекція 8) Атмосферное давление 7
Атмосферное давление 7 Проблемы ЦОДов и их решение
Проблемы ЦОДов и их решение Инфракрасная спектросокопия
Инфракрасная спектросокопия Двигатели самолетов с вертикальным взлетом и посадкой. Тяговооруженность
Двигатели самолетов с вертикальным взлетом и посадкой. Тяговооруженность Физика в загадках и пословицах
Физика в загадках и пословицах