- ЛЕКЦИИ термех. модуль 1

Содержание
- 2. МЕХАНИКА
- 3. ЛЕКЦИЯ 1 План: 1.1 МЕХАНИКА 1.1 Основные понятия и определения. 1.2. Аксиомы статики. 1.3. Связи и
- 4. Введение в статику 1.2 Статика - раздел механики, в котором излагается общее учение о силах и
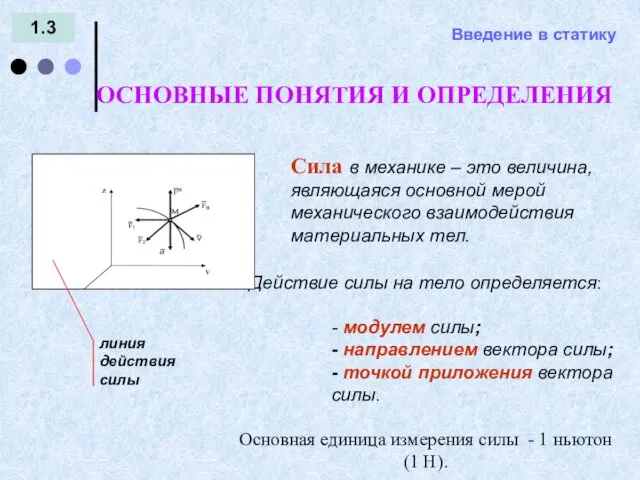
- 5. Введение в статику 1.3 Сила в механике – это величина, являющаяся основной мерой механического взаимодействия материальных
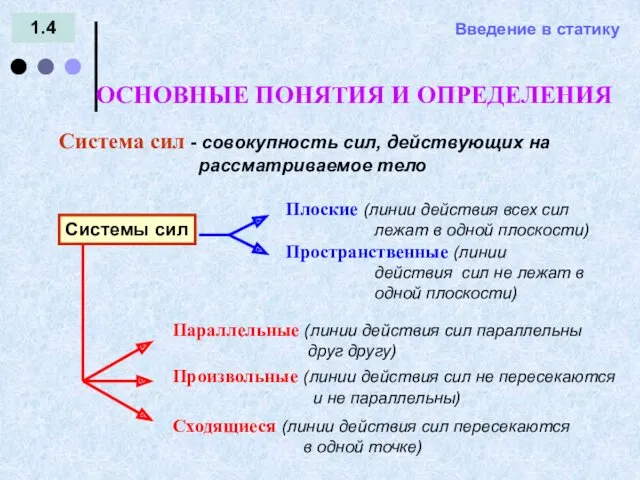
- 6. Введение в статику 1.4 Система сил - совокупность сил, действующих на рассматриваемое тело ОСНОВНЫЕ ПОНЯТИЯ И
- 7. Введение в статику 1.5 Эквивалентными называются две системы сил, приводящие тело к одному и тому же
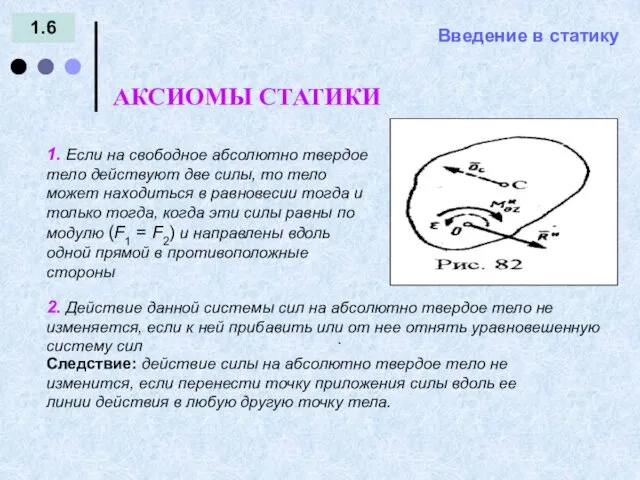
- 8. Введение в статику 1.6 АКСИОМЫ СТАТИКИ
- 9. Введение в статику 1.7 АКСИОМЫ СТАТИКИ 3. Закон параллелограмма сил: две силы, приложенные к телу в
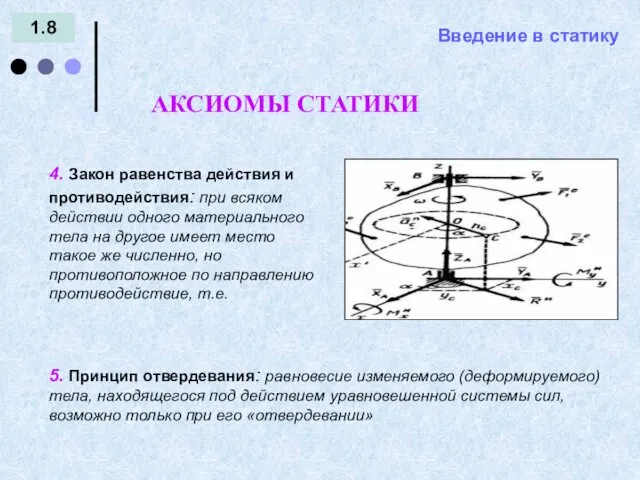
- 10. Введение в статику 1.8 АКСИОМЫ СТАТИКИ = - 4. Закон равенства действия и противодействия: при всяком
- 11. Введение в статику 1.9 СВЯЗИ И ИХ РЕАКЦИИ = -
- 12. Введение в статику 1.10 СВЯЗИ И ИХ РЕАКЦИИ = -
- 13. Введение в статику 1.11 СВЯЗИ И ИХ РЕАКЦИИ = -
- 14. ЛЕКЦИЯ 2 План: 2.1 МЕХАНИКА 2.1. Проекции сил. 2.2. Момент силы относительно точки и относительно оси.
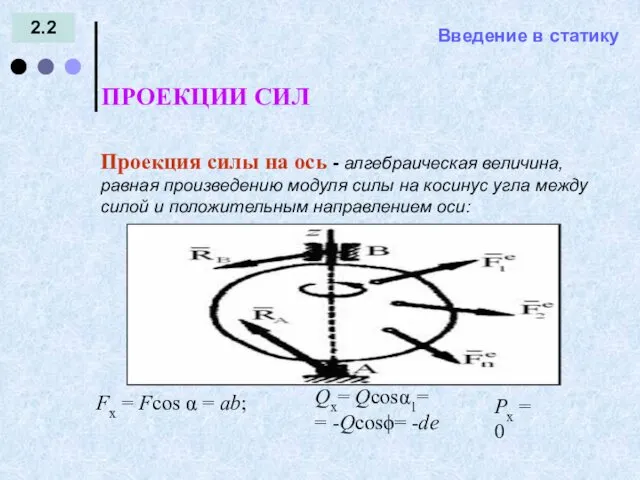
- 15. Введение в статику 2.2 ПРОЕКЦИИ СИЛ = - Проекция силы на ось - алгебраическая величина, равная
- 16. Введение в статику 2.3 ПРОЕКЦИИ СИЛ = - Проекция силы на плоскость это вектор , заключенный
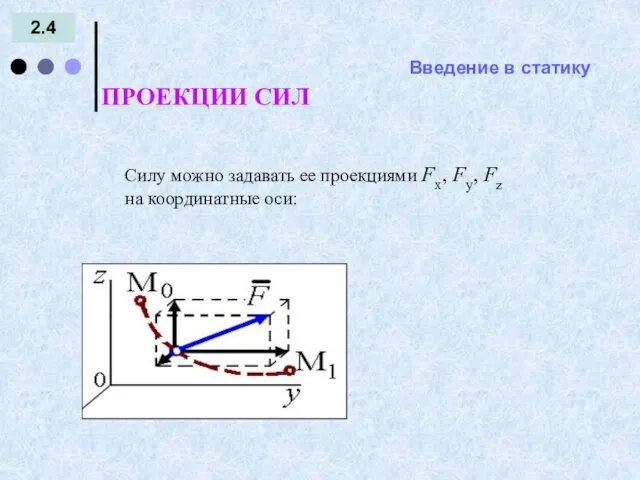
- 17. Введение в статику 2.4 ПРОЕКЦИИ СИЛ = - Силу можно задавать ее проекциями Fx, Fy, Fz
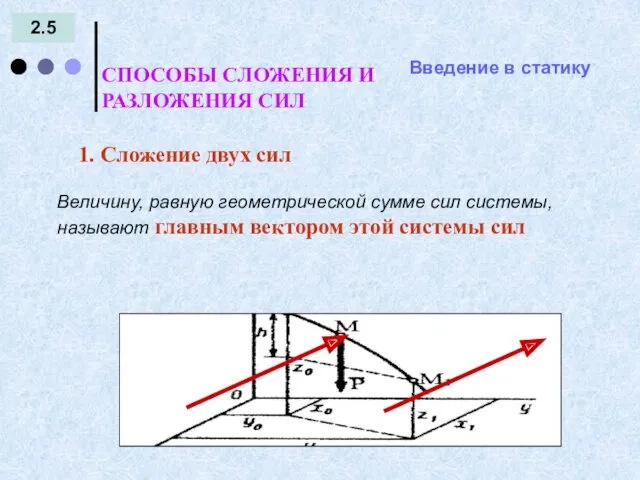
- 18. Введение в статику 2.5 СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ = - Величину, равную геометрической сумме сил
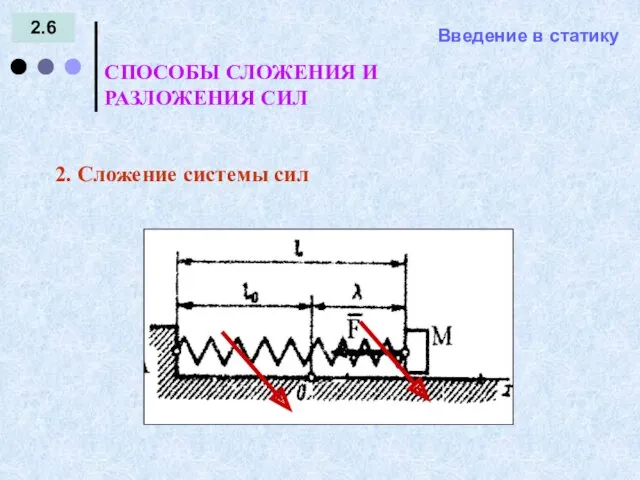
- 19. Введение в статику 2.6 = - 2. Сложение системы сил СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ
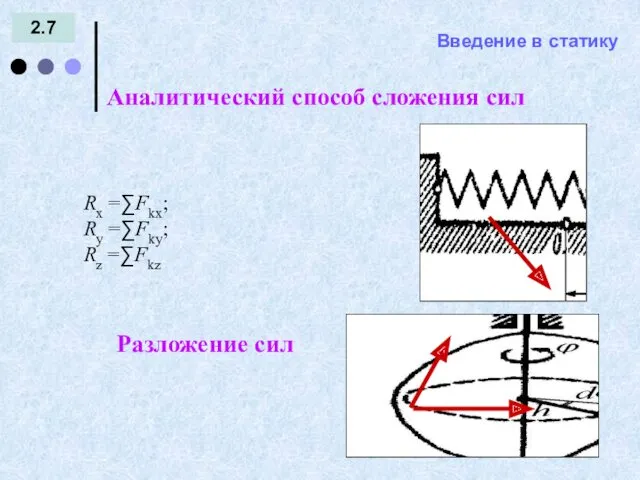
- 20. Введение в статику 2.7 Аналитический способ сложения сил = - Rx =∑Fkx; Ry =∑Fky; Rz =∑Fkz
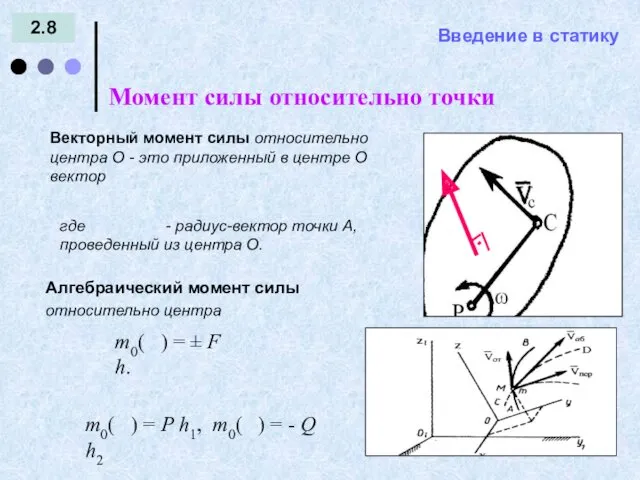
- 21. Введение в статику 2.8 Момент силы относительно точки = - где - радиус-вектор точки А, проведенный
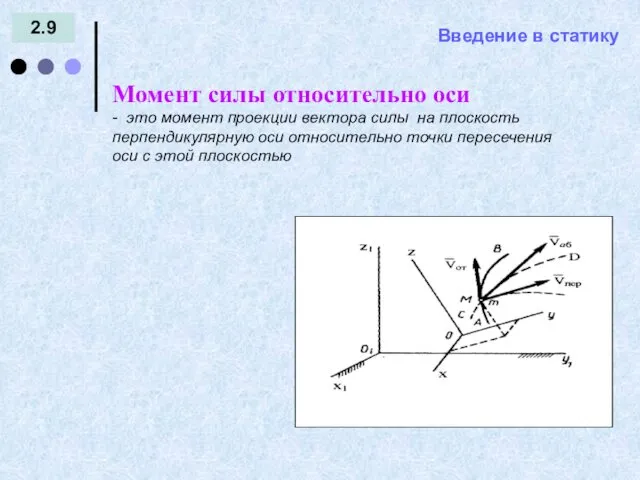
- 22. Введение в статику 2.9 Момент силы относительно оси = - - это момент проекции вектора силы
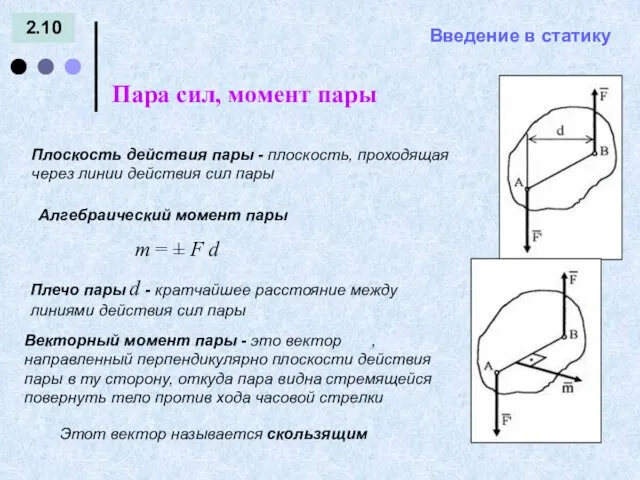
- 23. Введение в статику 2.10 Пара сил, момент пары = - Плечо пары d - кратчайшее расстояние
- 24. ЛЕКЦИЯ 3 План: 3.1 МЕХАНИКА 3.1. Теорема о параллельном переносе силы. 3.2. Приведение системы сил к
- 25. Введение в статику 3.2 Теорема о параллельном переносе силы = - Силу, приложенную к абсолютно твердому
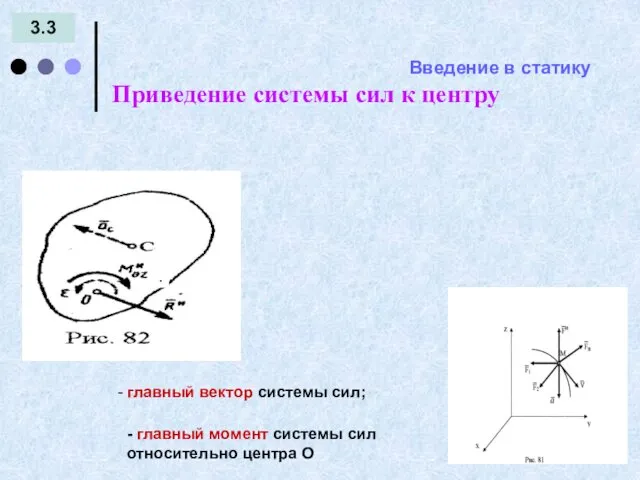
- 26. Введение в статику 3.3 Приведение системы сил к центру = - .
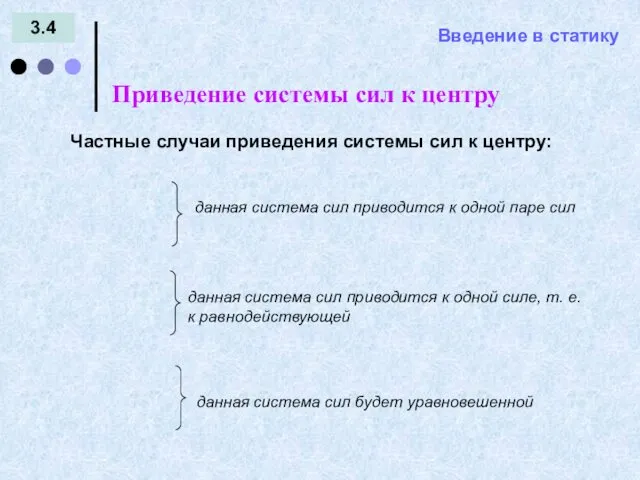
- 27. Введение в статику 3.4 = - Частные случаи приведения системы сил к центру: Приведение системы сил
- 28. ЛЕКЦИЯ 4 План: 4.1 МЕХАНИКА 4.1. Теорема Вариньона. 4.2. Условия равновесия различных систем сил. СТАТИКА Модуль
- 29. 4.2 ТЕОРЕМА ВАРИНЬОНА Пусть система сил приводится к равнодействующей Приложим в точке С силу Если данная
- 30. 4.3 УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ Равновесие пространственной системы произвольно расположенных сил Условия равновесия Равновесие пространственной
- 31. 4.4 Условия равновесия УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ Равновесие системы сходящихся сил в геометрической форме: необходимо
- 32. 4.5 Условия равновесия Равновесие плоской системы произвольных сил УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
- 33. 4.6 Условия равновесия Равновесие плоской системы параллельных сил УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ точки A и
- 34. ЛЕКЦИЯ 5 План: 5.1 МЕХАНИКА 5.1. Равновесие систем тел. 5.2. Равновесие тела при наличии трения СТАТИКА
- 35. 5.2 РАВНОВЕСИЕ СИСТЕМ ТЕЛ Условия равновесия Внутренние связи – это связи, соединяющие части конструкции Два способа
- 36. 5.3 РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ = - Условия равновесия Сцепление и трение скольжения Условие равновесия:
- 37. 5.4 = - Условия равновесия Трение качения РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ ( ) – пара
- 38. ЛЕКЦИЯ 5 План: 6.1 МЕХАНИКА 6.1. Центр параллельных сил 6.2. Центр тяжести твердого тела СТАТИКА Модуль
- 39. 6.2 ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ = - ЦЕНТР ТЯЖЕСТИ R xC= F1x1+ F2x2+…+Fnxn R xC = ΣFkxk.
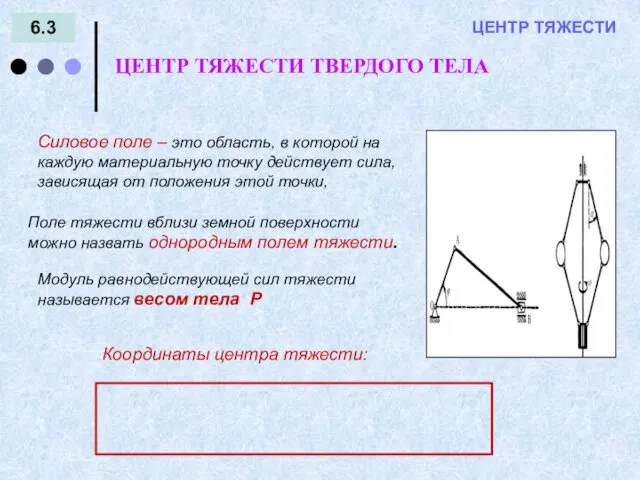
- 40. 6.3 ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА = - ЦЕНТР ТЯЖЕСТИ Силовое поле – это область, в которой
- 41. 6.4 = - ЦЕНТР ТЯЖЕСТИ ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
- 42. 6.4 = - ЦЕНТР ТЯЖЕСТИ ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА Способы нахождения положения центров тяжести тел сложной
- 43. МЕХАНИКА
- 44. ЛЕКЦИЯ 7 План: 7.1 МЕХАНИКА 7.1. Векторный способ задания движения точки. 7.2. Координатный способ задания движения
- 45. 7.2 КИНЕМАТИКА ТОЧКИ Кинематикой называется раздел механики, в котором изучаются геометрические свойства движения тел без учета
- 46. 7.3 Векторный способ задания движения точки КИНЕМАТИКА ТОЧКИ закон движения точки Скорость точки в момент времени
- 47. 7.4 Координатный способ задания движения точки КИНЕМАТИКА ТОЧКИ
- 48. ЛЕКЦИЯ 8 План: 8.1 МЕХАНИКА 8.1. Естественный способ задания движения точки. 8.2. Частные случаи движения точки
- 49. 8.2 Естественный способ задания движения точки КИНЕМАТИКА ТОЧКИ Оси естественного трехгранника Закон движения точки
- 50. 8.3 КИНЕМАТИКА ТОЧКИ Естественный способ задания движения точки Скорость точки или Кривизна траектории в точке М
- 51. 8.4 КИНЕМАТИКА ТОЧКИ Естественный способ задания движения точки Частные случаи движения точки
- 52. ЛЕКЦИЯ 9 План: 9.1 МЕХАНИКА 9.1. Поступательное движение тела. 9.2. Вращение твёрдого тела вокруг неподвижной оси.
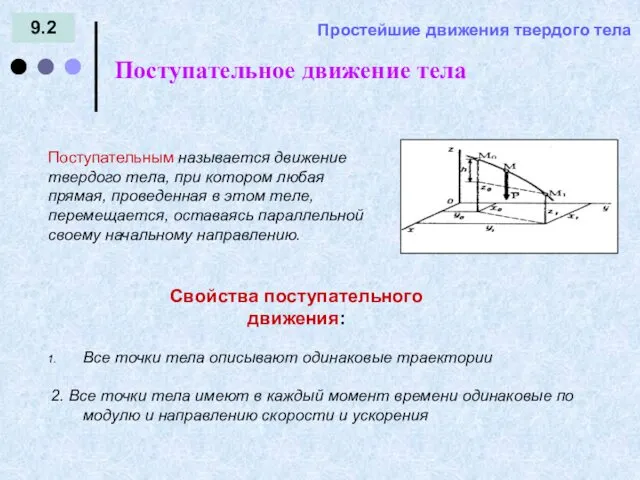
- 53. 9.2 Поступательное движение тела Простейшие движения твердого тела Свойства поступательного движения: Все точки тела описывают одинаковые
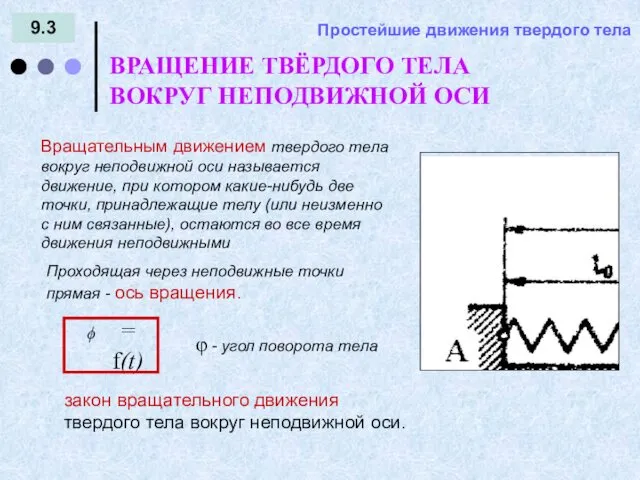
- 54. 9.3 ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ = - Простейшие движения твердого тела Вращательным движением твердого
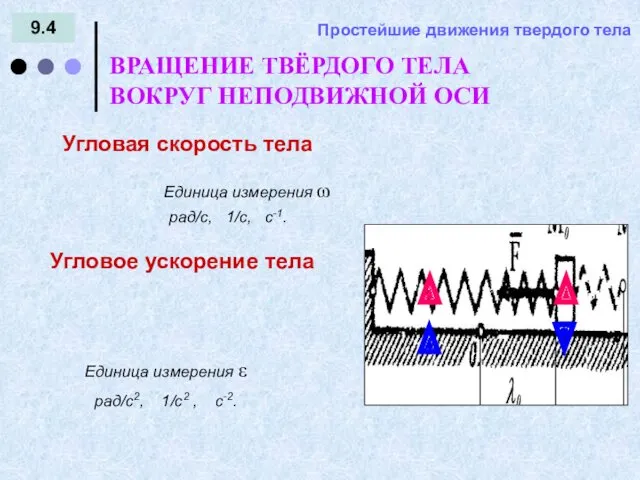
- 55. 9.4 = - Простейшие движения твердого тела Угловая скорость тела ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
- 56. 9.4 = - Простейшие движения твердого тела ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ Скорости точек вращающегося
- 57. ЛЕКЦИЯ 10 План: 10.1 МЕХАНИКА 10.1. Основные определения. 10.2. Теорема о сложении скоростей (теорема Кориолиса). Модуль
- 58. 10.2 Основные определения = - СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ Сложное движение точки – это такое движение, при
- 59. 10.3 Основные определения = - СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ ). Переносное движение - движение, совершаемое подвижной системой
- 60. 10.4 = - СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ Теорема о сложении скоростей при сложном движении абсолютная скорость точки
- 61. ЛЕКЦИЯ 8 План: 11.1 МЕХАНИКА 11.1. Теорема о сложении ускорений. 11.2. Ускорение Кориолиса. КИНЕМАТИКА Модуль 1
- 62. 11.2 = - ТЕОРЕМА О СЛОЖЕНИИ УСКОРЕНИЙ (ТЕОРЕМА КОРИОЛИСА) СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
- 63. 11.3 = - УСКОРЕНИЕ КОРИОЛИСА СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ . aкор = 2| ω | ⋅|vот |
- 64. 11.4 = - СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ - когда угол между векторами и α = 0, или
- 65. ЛЕКЦИЯ 12 План: 12.1 МЕХАНИКА 12.1. Понятие плоскопараллельного движения тела 12.2. Определение скоростей точек плоской фигуры
- 66. 12.2 = - Понятие о плоскопараллельном движении тела Плоскопараллельное движение твердого тела Плоскопараллельное (плоское) движение -
- 67. 12.3 = - ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ Плоскопараллельное движение твердого тела
- 68. 12.4 = - ТЕОРЕМА О ПРОЕКЦИЯХ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ Плоскопараллельное движение твердого тела vB cos
- 69. 12.5 = - Понятие МЦС и способы его нахождения Плоскопараллельное движение твердого тела Мгновенным центром скоростей
- 70. 12.5 = - Понятие МЦС и способы его нахождения Плоскопараллельное движение твердого тела Частные случаи определения
- 71. ЛЕКЦИЯ 13 План: 13.1 МЕХАНИКА 13.1. Определение ускорений точек плоской фигуры 13.2. Мгновенный центр ускорений Модуль
- 72. 13.2 = - ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ Плоскопараллельное движение твердого тела
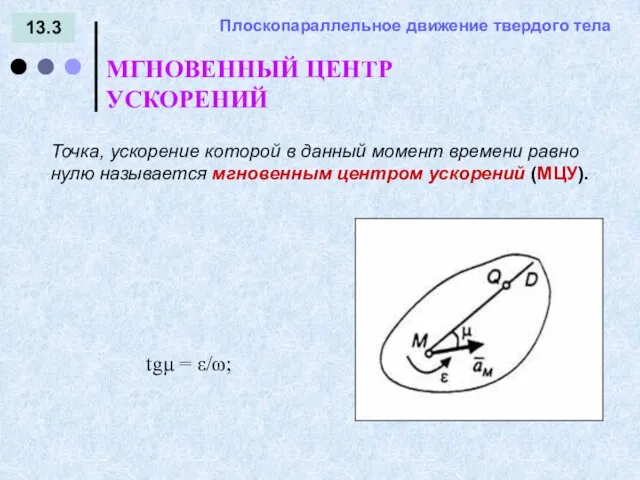
- 73. 13.3 = - МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ Плоскопараллельное движение твердого тела Точка, ускорение которой в данный момент
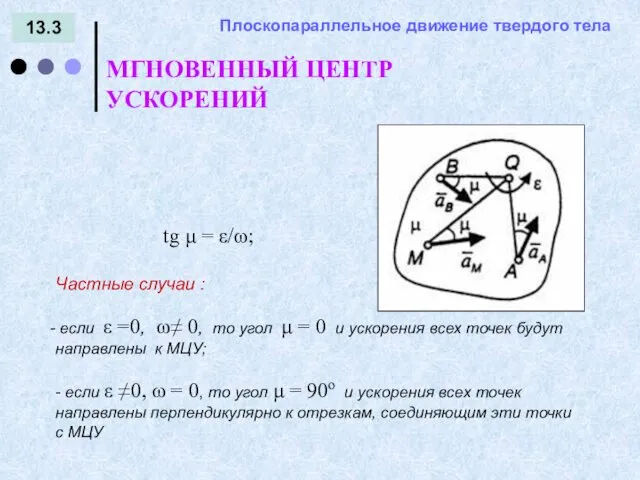
- 74. 13.3 = - МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ Плоскопараллельное движение твердого тела tg μ = ε/ω; Частные случаи
- 75. МЕХАНИКА
- 76. ЛЕКЦИЯ 14 План: 14.1 МЕХАНИКА 14.1. Основные законы механики 14.2. Дифференциальные уравнения движения материальной точки ДИНАМИКА
- 77. ДИНАМИКА ТОЧКИ 14.2 ОБЩИЕ СВЕДЕНИЯ Динамика - это раздел механики, в котором изучается движение материальных точек,
- 78. 14.3 ОБЩИЕ СВЕДЕНИЯ ДИНАМИКА ТОЧКИ
- 79. 14.4 Дифференциальные уравнения движения материальной точки Дифференциальные уравнения движения точки в проекциях на декартовые оси: ДИНАМИКА
- 80. 14.5 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Дифференциальные уравнения в проекциях на оси естественного трехгранника
- 81. ЛЕКЦИЯ 15 План: 15.1 МЕХАНИКА 15.1. Две задачи динамики. 15.2. Решение задач ДИНАМИКА ТОЧКИ Модуль 1
- 82. 15.2 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ ДВЕ ЗАДАЧИ ДИНАМИКИ Первая задача динамики: по известному
- 83. 15.3 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Решение задач динамики точки: Первая задача динамики: Вторая
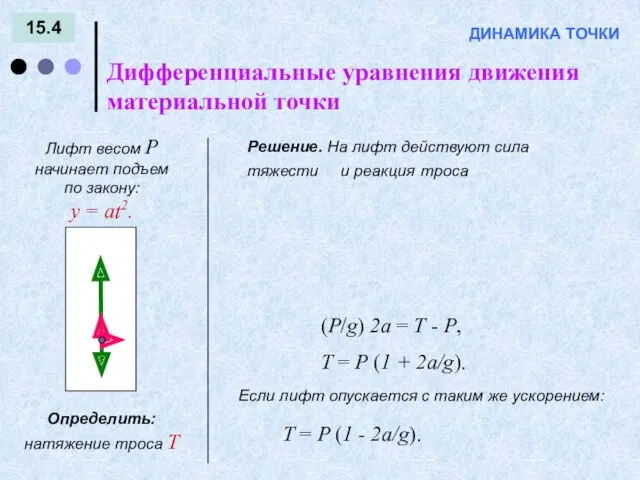
- 84. 15.4 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Лифт весом Р начинает подъем по закону: y
- 85. 15.5 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Задача 2. Материальная точка с массой m движется
- 86. ЛЕКЦИЯ 16 План: 16.1 МЕХАНИКА 16.1. Свободные прямолинейные колебания материальной точки 16.2. Влияние постоянной силы на
- 87. 16.2 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Свободные прямолинейные колебания материальной точки Сила сопротивления R,
- 88. 16.3 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Свободные прямолинейные колебания материальной точки если c/m =
- 89. 16.4 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Характеристическое уравнение: x = ent Свободные прямолинейные колебания
- 90. 16.5 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Свободные прямолинейные колебания материальной точки A - амплитуда
- 91. 16.6 Дифференциальные уравнения движения материальной точки ДИНАМИКА ТОЧКИ Влияние постоянной силы на свободные колебания точки P=
- 92. МЕХАНИКА
- 93. ЛЕКЦИЯ 17 План: 17.1 МЕХАНИКА 17.1. Введение в динамику системы. Свойства внутренних сил. 17.2. Центр масс
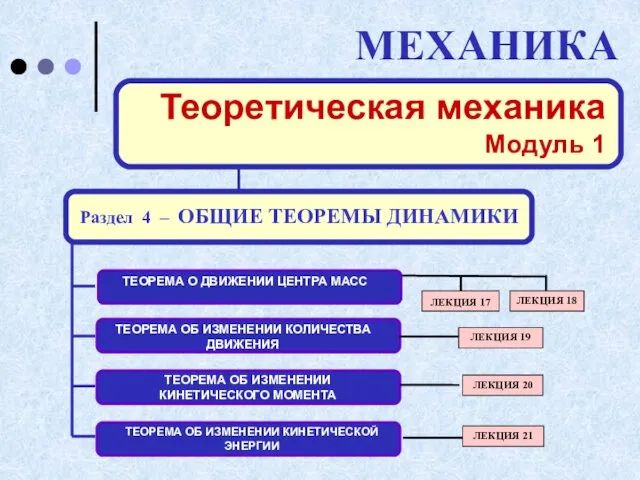
- 94. 17.2 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Введение в динамику системы Механическая система -
- 95. 17.3 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Центр масс механической системы Масса системы: Центром
- 96. 17.4 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ — ускорение центра масс системы Дифференциальные уравнения
- 97. 17.5 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Закон сохранения движения центра масс 1. Пусть
- 98. 17.6 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Примеры применения теоремы о движении центра масс
- 99. ЛЕКЦИЯ 18 План: 18.1 МЕХАНИКА 18.1. Количество движения. 18.2. Импульс силы. 18.3. Теорема об изменении количества
- 100. 18.2 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Количество движения Количество движения материальной точки Количество
- 101. 18.3 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Импульс силы ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ Единицей измерения импульса силы в
- 102. 18.4 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ Дифференциальное уравнение движения точки
- 103. 18.5 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ Для всех точек механической системы Теорема об
- 104. 17.10 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Закон сохранения количества движения ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ 1. 2.
- 105. ЛЕКЦИЯ 19 План: 19.1 МЕХАНИКА 19.1. Осевые моменты инерции тела. 19.2. Момент количества движения материальной точки.
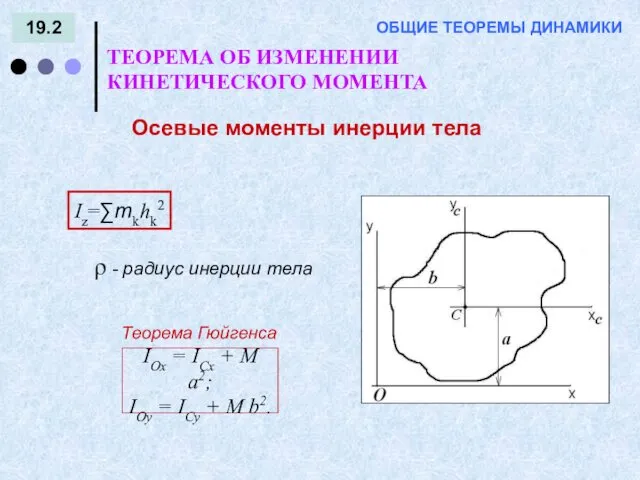
- 106. 19.2 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Осевые моменты инерции тела Iz=∑mkhk2 ρ -
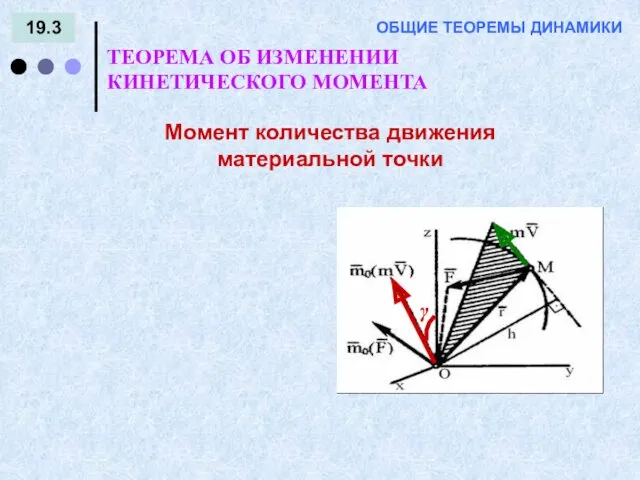
- 107. 19.3 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Момент количества движения материальной точки
- 108. 19.4 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Теорема об изменении момента количества движения точки
- 109. ЛЕКЦИЯ 20 План: 20.1 МЕХАНИКА 20.1. Теорема об изменении кинетического момента. 20.2. Дифференциальное уравнение вращения твёрдого
- 110. 20.2 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Кинетический момент системы Кинетический момент вращающегося тела
- 111. 20.3 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Теорема об изменении кинетического момента механической системы
- 112. 20.4 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ следствия из теоремы:
- 113. 20.5 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Дифференциальное уравнение вращения тела вокруг неподвижной оси
- 114. ЛЕКЦИЯ 21 План: 21.1 МЕХАНИКА 21.1. Работа силы и мощность ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Модуль 1 ТЕОРЕТИЧЕСКАЯ
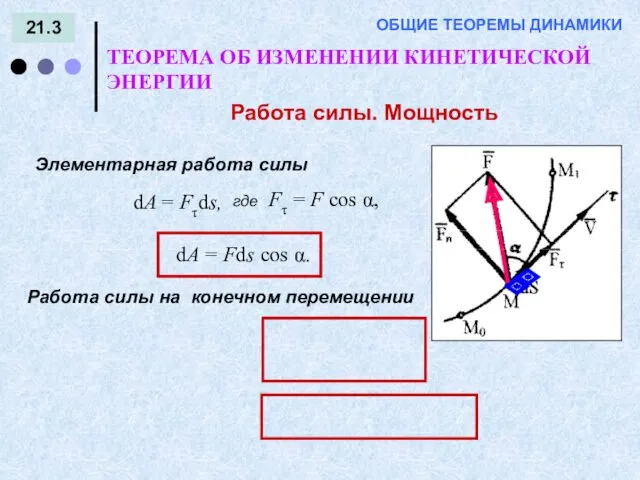
- 115. 21.3 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Работа силы. Мощность Элементарная работа силы Работа
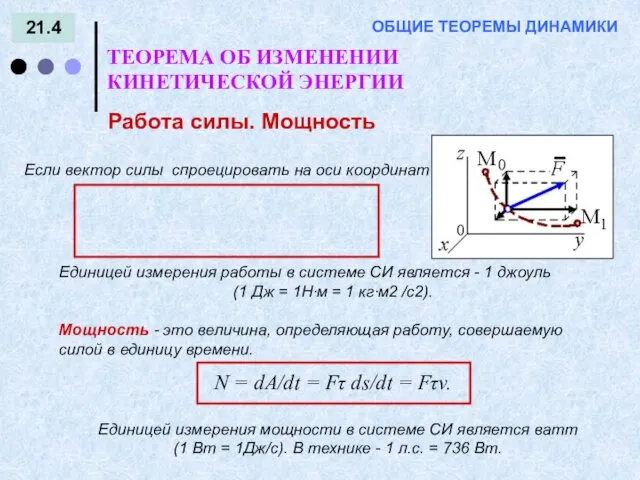
- 116. 21.4 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Работа силы. Мощность Если вектор силы спроецировать
- 117. 21.5 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Примеры вычисления работы Работа силы тяжести z0
- 118. 21.6 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Работа силы. Мощность Работа силы упругости F
- 119. 21.7 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Работа силы. Мощность Работа силы, приложенной к
- 120. ЛЕКЦИЯ 22 План: 22.1 МЕХАНИКА 22.1. Кинетическая энергия. 22.2. Теорема об изменении кинетической энергии ОБЩИЕ ТЕОРЕМЫ
- 121. 22.2 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ для материальной точки Кинетическая энергия Единица измерения
- 122. 22.3 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Кинетическая энергия для твердого тела Поступательное движение
- 123. 22.4 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ maτ = ∑Fkτ. Рассмотрим материальную точку с
- 124. 22.5 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ Рассмотрим материальную точку механической системы с массой
- 125. МЕХАНИКА ЛЕКЦИЯ 26 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ УРАВНЕНИЯ ЛАГРАНЖА ПРИНЦИП ДАЛАМБЕРА ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ ЛЕКЦИЯ 24
- 126. ЛЕКЦИЯ 23 План: 23.1 МЕХАНИКА 23.1. Сила инерции. 23.2. Принцип Даламбера для материальной точки и механической
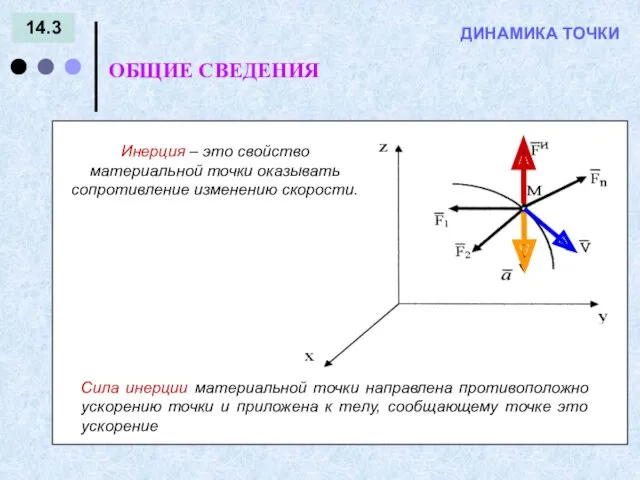
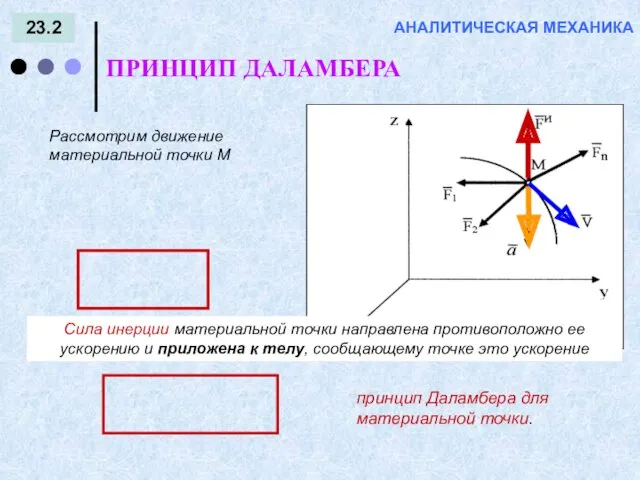
- 127. 23.2 ПРИНЦИП ДАЛАМБЕРА АНАЛИТИЧЕСКАЯ МЕХАНИКА Рассмотрим движение материальной точки М Сила инерции материальной точки направлена противоположно
- 128. 23.3 ПРИНЦИП ДАЛАМБЕРА АНАЛИТИЧЕСКАЯ МЕХАНИКА Рассмотрим материальную точку механической системы: для всех точек полученная система сил
- 129. 23.4 ПРИНЦИП ДАЛАМБЕРА АНАЛИТИЧЕСКАЯ МЕХАНИКА Главный вектор и главный момент сил инерции механической системы Главный вектор
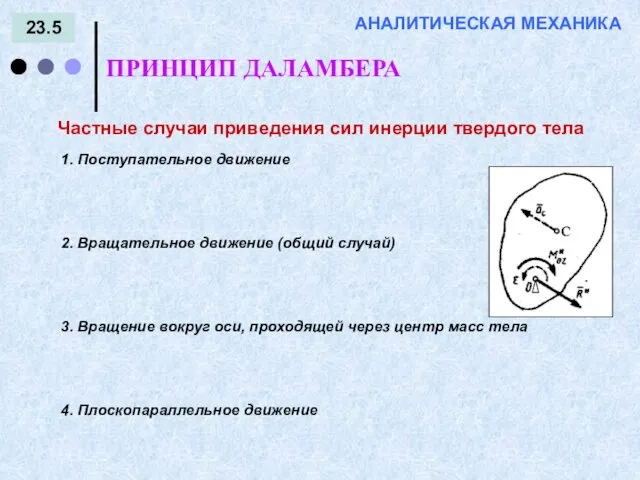
- 130. 23.5 ПРИНЦИП ДАЛАМБЕРА АНАЛИТИЧЕСКАЯ МЕХАНИКА Частные случаи приведения сил инерции твердого тела 1. Поступательное движение 2.
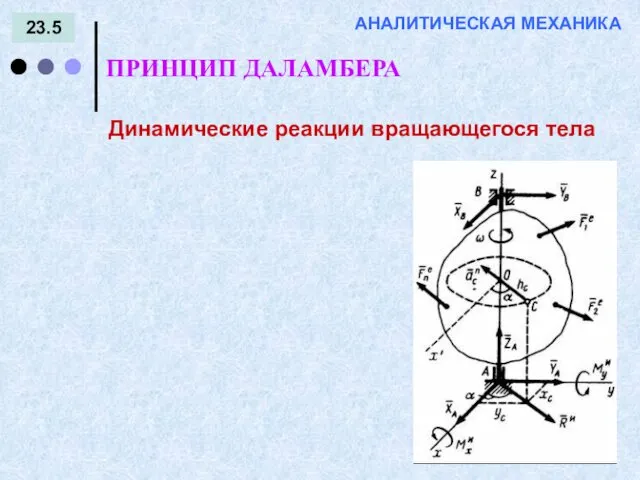
- 131. 23.5 ПРИНЦИП ДАЛАМБЕРА АНАЛИТИЧЕСКАЯ МЕХАНИКА Динамические реакции вращающегося тела
- 132. ЛЕКЦИЯ 24 План: 24.1 МЕХАНИКА 24.1. Классификация связей. 24.2. Возможные перемещения системы. Идеальные связи. 24.3. Принцип
- 133. 24.2 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ АНАЛИТИЧЕСКАЯ МЕХАНИКА Классификация связей Связи - это любого вида ограничения, которые налагаются
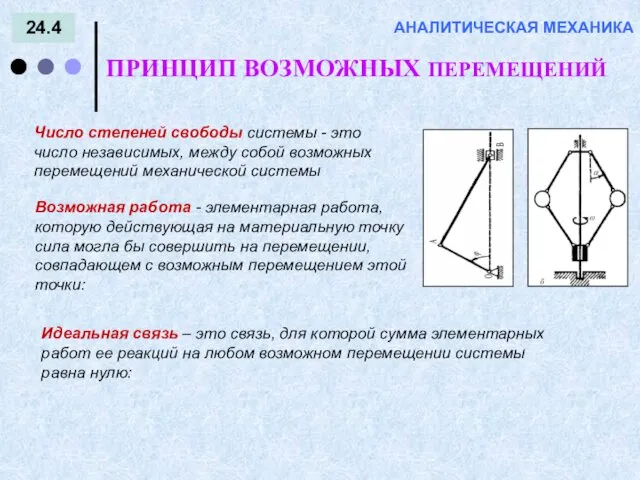
- 134. Возможное перемещение механической системы - это совокупность воображаемых элементарных перемещений точек системы из занимаемого в данный
- 135. 24.4 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ АНАЛИТИЧЕСКАЯ МЕХАНИКА Число степеней свободы системы - это число независимых, между собой
- 136. 24.5 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ АНАЛИТИЧЕСКАЯ МЕХАНИКА Для равновесия механической системы с идеальными связями необходимо и достаточно,
- 137. ЛЕКЦИЯ 25 План: 25.1 МЕХАНИКА 25.1.Обобщённые координаты и обобщенные скорости. 25.2. Обобщённые силы. 25.3. Общее уравнение
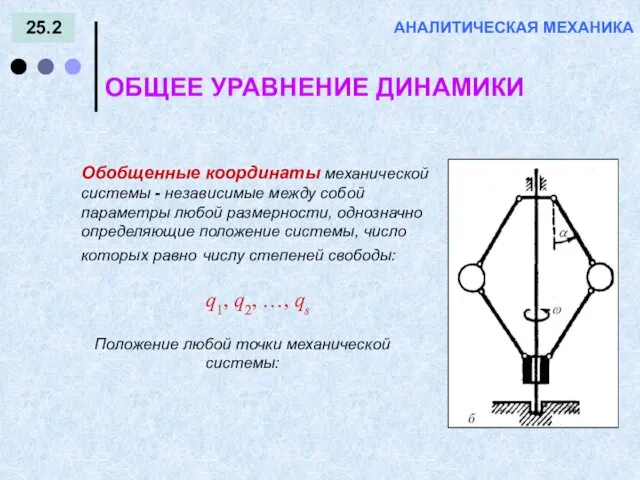
- 138. 25.2 АНАЛИТИЧЕСКАЯ МЕХАНИКА ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ Обобщенные координаты механической системы - независимые между собой параметры любой
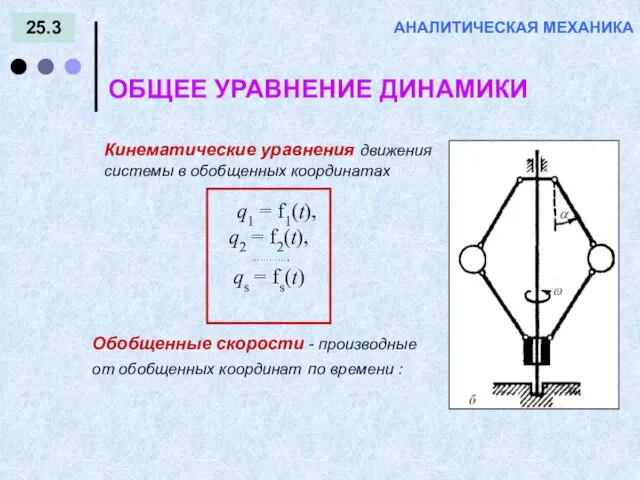
- 139. 25.3 АНАЛИТИЧЕСКАЯ МЕХАНИКА ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ q1 = f1(t), q2 = f2(t), …………, qs = fs(t)
- 140. Пусть механическая система состоит из n материальных точек, на которые действуют силы : 25.4 АНАЛИТИЧЕСКАЯ МЕХАНИКА
- 141. 25.5 АНАЛИТИЧЕСКАЯ МЕХАНИКА ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ Тогда, согласно принципу возможных перемещений: Если ко всем точкам системы
- 142. 25.6 АНАЛИТИЧЕСКАЯ МЕХАНИКА ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ Общее уравнение динамики в обобщенных координатах:
- 143. ЛЕКЦИЯ 26 План: 26.1 МЕХАНИКА 26.1. Уравнения Лагранжа АНАЛИТИЧЕСКАЯ МЕХАНИКА Модуль 1 ТЕОРЕТИЧЕСКАЯ МЕХАНИКА УРАВНЕНИЯ ЛАГРАНЖА
- 144. 26.2 АНАЛИТИЧЕСКАЯ МЕХАНИКА УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА : Лагранж получил формулу, вычисляющую обобщенные силы инерции через
- 145. 26.3 АНАЛИТИЧЕСКАЯ МЕХАНИКА УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА : Дифференциальные уравнения движения системы в обобщенных координатах (уравнения
- 147. Скачать презентацию

МЕХАНИКА
МЕХАНИКА
ЛЕКЦИЯ 1 План:
1.1
МЕХАНИКА
1.1 Основные понятия и определения.
1.2. Аксиомы статики.
1.3.
ЛЕКЦИЯ 1 План:
1.1
МЕХАНИКА
1.1 Основные понятия и определения.
1.2. Аксиомы статики.
1.3.
Введение в статику
1.2
Статика - раздел механики, в котором излагается общее
Введение в статику
1.2
Статика - раздел механики, в котором излагается общее
Введение в статику
1.3
Сила в механике – это величина, являющаяся основной мерой
Введение в статику
1.3
Сила в механике – это величина, являющаяся основной мерой
Введение в статику
1.4
Система сил - совокупность сил, действующих на
Введение в статику
1.4
Система сил - совокупность сил, действующих на
Введение в статику
1.5
Эквивалентными называются две системы сил, приводящие тело к одному
Введение в статику
1.5
Эквивалентными называются две системы сил, приводящие тело к одному
Введение в статику
1.6
АКСИОМЫ СТАТИКИ
Введение в статику
1.6
АКСИОМЫ СТАТИКИ
Введение в статику
1.7
АКСИОМЫ СТАТИКИ
3. Закон параллелограмма сил: две силы, приложенные
Введение в статику
1.7
АКСИОМЫ СТАТИКИ
3. Закон параллелограмма сил: две силы, приложенные
Введение в статику
1.8
АКСИОМЫ СТАТИКИ
= -
4. Закон равенства действия и
Введение в статику
1.8
АКСИОМЫ СТАТИКИ
= -
4. Закон равенства действия и
Введение в статику
1.9
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
1.9
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
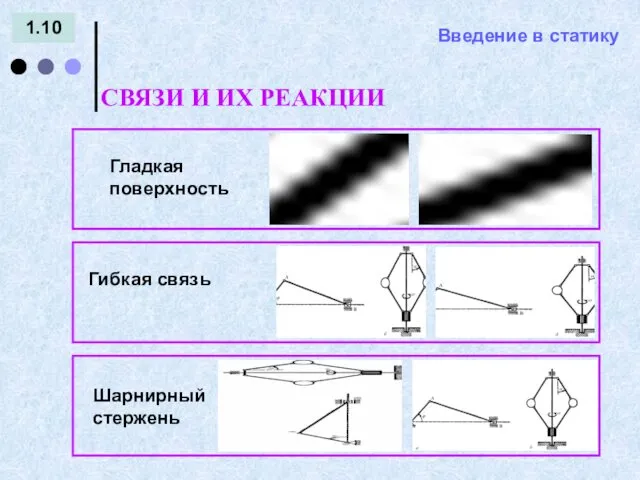
1.10
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
1.10
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
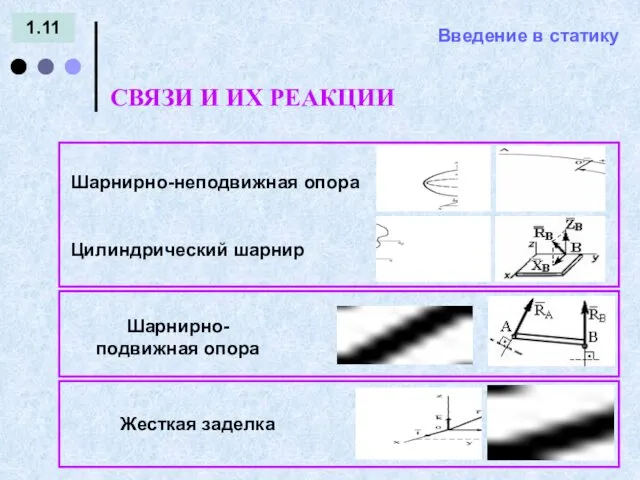
1.11
СВЯЗИ И ИХ РЕАКЦИИ
= -
Введение в статику
1.11
СВЯЗИ И ИХ РЕАКЦИИ
= -
ЛЕКЦИЯ 2 План:
2.1
МЕХАНИКА
2.1. Проекции сил.
2.2. Момент силы относительно точки и
ЛЕКЦИЯ 2 План:
2.1
МЕХАНИКА
2.1. Проекции сил.
2.2. Момент силы относительно точки и
Введение в статику
2.2
ПРОЕКЦИИ СИЛ
= -
Проекция силы на ось - алгебраическая
Введение в статику
2.2
ПРОЕКЦИИ СИЛ
= -
Проекция силы на ось - алгебраическая
Введение в статику
2.3
ПРОЕКЦИИ СИЛ
= -
Проекция силы на плоскость это
Введение в статику
2.3
ПРОЕКЦИИ СИЛ
= -
Проекция силы на плоскость это
Введение в статику
2.4
ПРОЕКЦИИ СИЛ
= -
Силу можно задавать ее проекциями Fx,
Введение в статику
2.4
ПРОЕКЦИИ СИЛ
= -
Силу можно задавать ее проекциями Fx,
Введение в статику
2.5
СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ
= -
Величину, равную
Введение в статику
2.5
СПОСОБЫ СЛОЖЕНИЯ И РАЗЛОЖЕНИЯ СИЛ
= -
Величину, равную
Введение в статику
2.6
= -
2. Сложение системы сил
СПОСОБЫ СЛОЖЕНИЯ
Введение в статику
2.6
= -
2. Сложение системы сил
СПОСОБЫ СЛОЖЕНИЯ
Введение в статику
2.7
Аналитический способ сложения сил
= -
Rx =∑Fkx;
Ry =∑Fky;
Введение в статику
2.7
Аналитический способ сложения сил
= -
Rx =∑Fkx;
Ry =∑Fky;
Введение в статику
2.8
Момент силы относительно точки
= -
где - радиус-вектор
Введение в статику
2.8
Момент силы относительно точки
= -
где - радиус-вектор
Введение в статику
2.9
Момент силы относительно оси
= -
- это момент проекции
Введение в статику
2.9
Момент силы относительно оси
= -
- это момент проекции
Введение в статику
2.10
Пара сил, момент пары
= -
Плечо пары d
Введение в статику
2.10
Пара сил, момент пары
= -
Плечо пары d
ЛЕКЦИЯ 3 План:
3.1
МЕХАНИКА
3.1. Теорема о параллельном переносе силы.
3.2. Приведение системы
ЛЕКЦИЯ 3 План:
3.1
МЕХАНИКА
3.1. Теорема о параллельном переносе силы.
3.2. Приведение системы

Введение в статику
3.2
Теорема о параллельном переносе силы
= -
Силу, приложенную к
Введение в статику
3.2
Теорема о параллельном переносе силы
= -
Силу, приложенную к
Введение в статику
3.3
Приведение системы сил к центру
= -
.
Введение в статику
3.3
Приведение системы сил к центру
= -
.
Введение в статику
3.4
= -
Частные случаи приведения системы сил к центру:
Введение в статику
3.4
= -
Частные случаи приведения системы сил к центру:
ЛЕКЦИЯ 4 План:
4.1
МЕХАНИКА
4.1. Теорема Вариньона.
4.2. Условия равновесия различных систем сил.
ЛЕКЦИЯ 4 План:
4.1
МЕХАНИКА
4.1. Теорема Вариньона.
4.2. Условия равновесия различных систем сил.
4.2
ТЕОРЕМА ВАРИНЬОНА
Пусть система сил приводится к равнодействующей
Приложим в точке С силу
4.2
ТЕОРЕМА ВАРИНЬОНА
Пусть система сил приводится к равнодействующей
Приложим в точке С силу
4.3
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие пространственной системы произвольно расположенных сил
4.3
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие пространственной системы произвольно расположенных сил
4.4
Условия равновесия
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие системы сходящихся сил
4.4
Условия равновесия
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
Равновесие системы сходящихся сил
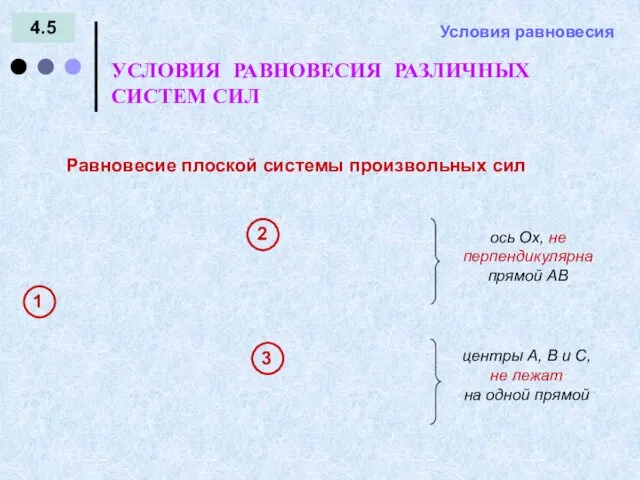
4.5
Условия равновесия
Равновесие плоской системы произвольных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
4.5
Условия равновесия
Равновесие плоской системы произвольных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
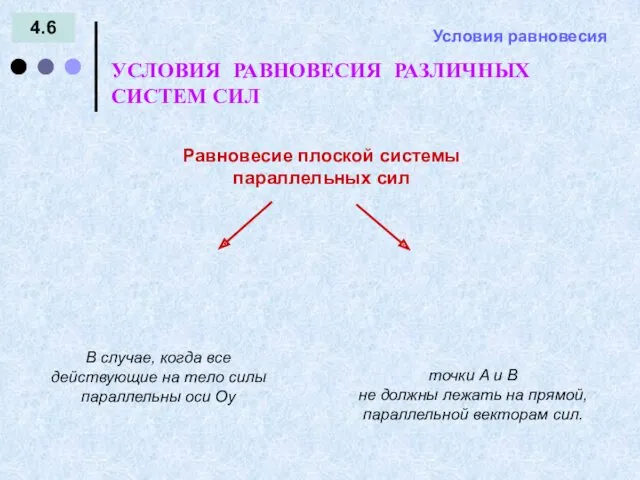
4.6
Условия равновесия
Равновесие плоской системы параллельных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
4.6
Условия равновесия
Равновесие плоской системы параллельных сил
УСЛОВИЯ РАВНОВЕСИЯ РАЗЛИЧНЫХ СИСТЕМ СИЛ
ЛЕКЦИЯ 5 План:
5.1
МЕХАНИКА
5.1. Равновесие систем тел.
5.2. Равновесие тела при наличии трения
ЛЕКЦИЯ 5 План:
5.1
МЕХАНИКА
5.1. Равновесие систем тел.
5.2. Равновесие тела при наличии трения
5.2
РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Условия равновесия
Внутренние связи – это связи, соединяющие части конструкции
Два
5.2
РАВНОВЕСИЕ СИСТЕМ ТЕЛ
Условия равновесия
Внутренние связи – это связи, соединяющие части конструкции
Два
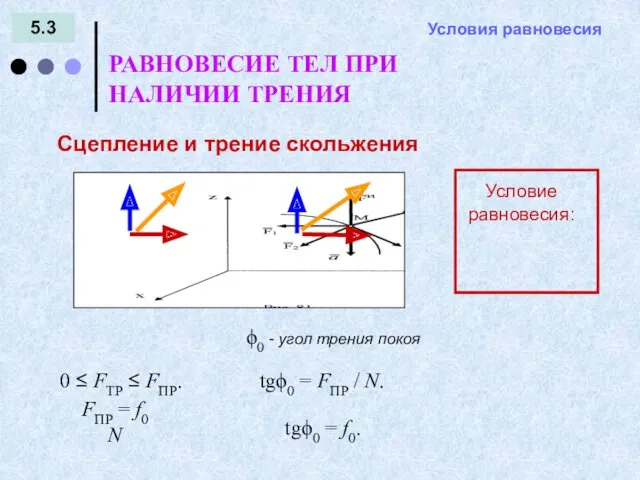
5.3
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
= -
Условия равновесия
Сцепление и трение скольжения
5.3
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
= -
Условия равновесия
Сцепление и трение скольжения
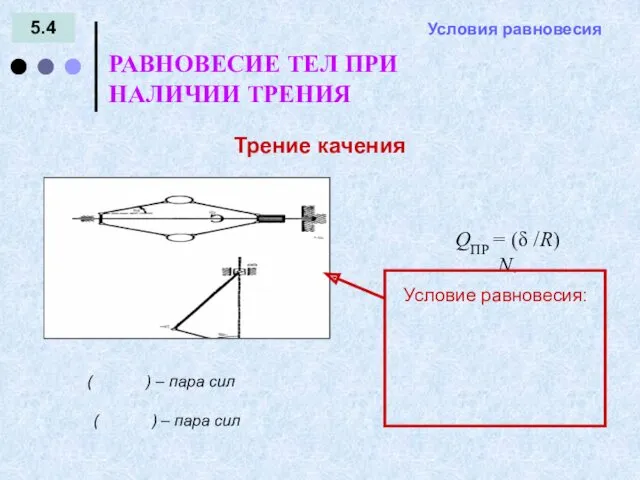
5.4
= -
Условия равновесия
Трение качения
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
( )
5.4
= -
Условия равновесия
Трение качения
РАВНОВЕСИЕ ТЕЛ ПРИ НАЛИЧИИ ТРЕНИЯ
( )
ЛЕКЦИЯ 5 План:
6.1
МЕХАНИКА
6.1. Центр параллельных сил
6.2. Центр тяжести твердого тела
СТАТИКА
ЛЕКЦИЯ 5 План:
6.1
МЕХАНИКА
6.1. Центр параллельных сил
6.2. Центр тяжести твердого тела
СТАТИКА
6.2
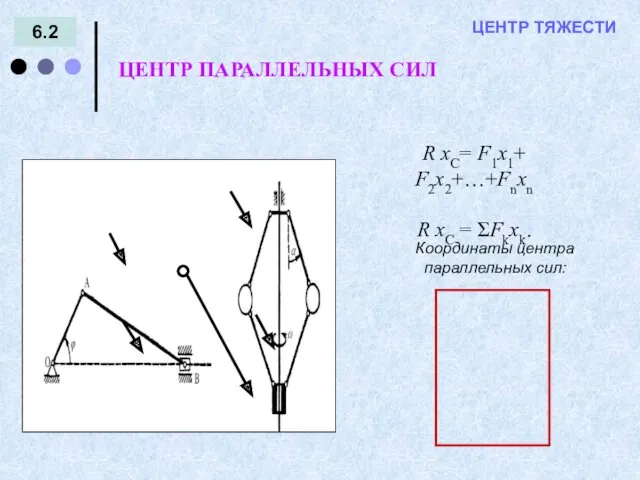
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
= -
ЦЕНТР ТЯЖЕСТИ
R xC= F1x1+ F2x2+…+Fnxn
R xC
6.2
ЦЕНТР ПАРАЛЛЕЛЬНЫХ СИЛ
= -
ЦЕНТР ТЯЖЕСТИ
R xC= F1x1+ F2x2+…+Fnxn
R xC
6.3
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
= -
ЦЕНТР ТЯЖЕСТИ
Силовое поле – это
6.3
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
= -
ЦЕНТР ТЯЖЕСТИ
Силовое поле – это
6.4
= -
ЦЕНТР ТЯЖЕСТИ
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
6.4
= -
ЦЕНТР ТЯЖЕСТИ
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
6.4
= -
ЦЕНТР ТЯЖЕСТИ
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
Способы нахождения положения центров
6.4
= -
ЦЕНТР ТЯЖЕСТИ
ЦЕНТР ТЯЖЕСТИ ТВЕРДОГО ТЕЛА
Способы нахождения положения центров
МЕХАНИКА
МЕХАНИКА
ЛЕКЦИЯ 7 План:
7.1
МЕХАНИКА
7.1. Векторный способ задания движения точки.
7.2. Координатный способ задания
ЛЕКЦИЯ 7 План:
7.1
МЕХАНИКА
7.1. Векторный способ задания движения точки.
7.2. Координатный способ задания
7.2
КИНЕМАТИКА ТОЧКИ
Кинематикой называется раздел механики, в котором изучаются геометрические свойства
7.2
КИНЕМАТИКА ТОЧКИ
Кинематикой называется раздел механики, в котором изучаются геометрические свойства
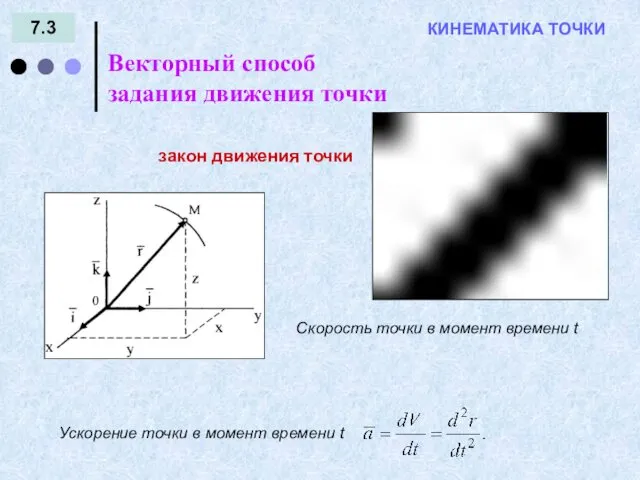
7.3
Векторный способ
задания движения точки
КИНЕМАТИКА ТОЧКИ
закон движения точки
Скорость точки
7.3
Векторный способ
задания движения точки
КИНЕМАТИКА ТОЧКИ
закон движения точки
Скорость точки
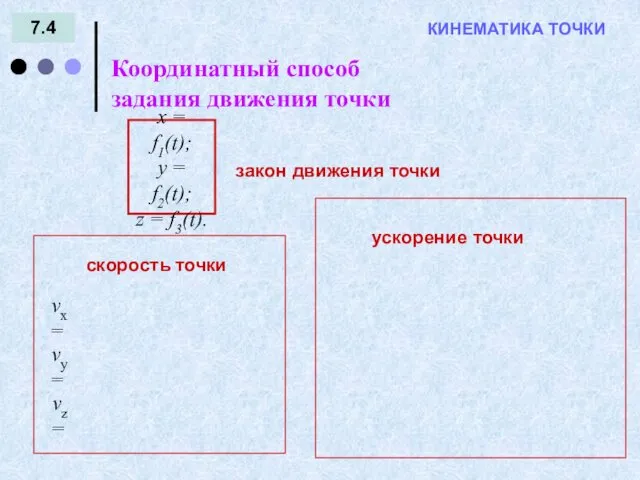
7.4
Координатный способ
задания движения точки
КИНЕМАТИКА ТОЧКИ
7.4
Координатный способ
задания движения точки
КИНЕМАТИКА ТОЧКИ
ЛЕКЦИЯ 8 План:
8.1
МЕХАНИКА
8.1. Естественный способ задания движения точки.
8.2. Частные случаи движения
ЛЕКЦИЯ 8 План:
8.1
МЕХАНИКА
8.1. Естественный способ задания движения точки.
8.2. Частные случаи движения
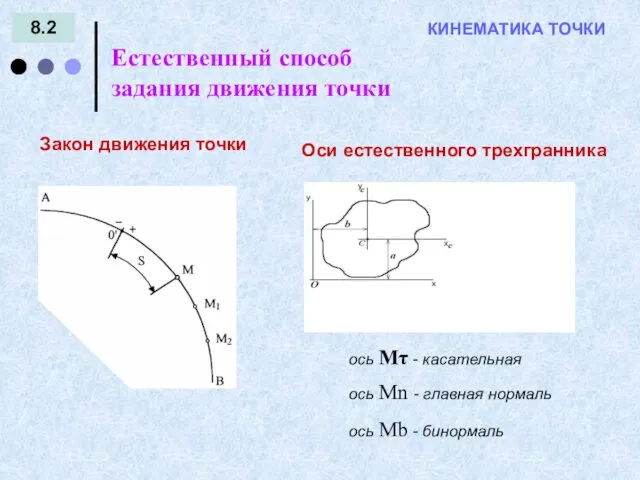
8.2
Естественный способ задания движения точки
КИНЕМАТИКА ТОЧКИ
Оси естественного трехгранника
Закон движения
8.2
Естественный способ задания движения точки
КИНЕМАТИКА ТОЧКИ
Оси естественного трехгранника
Закон движения
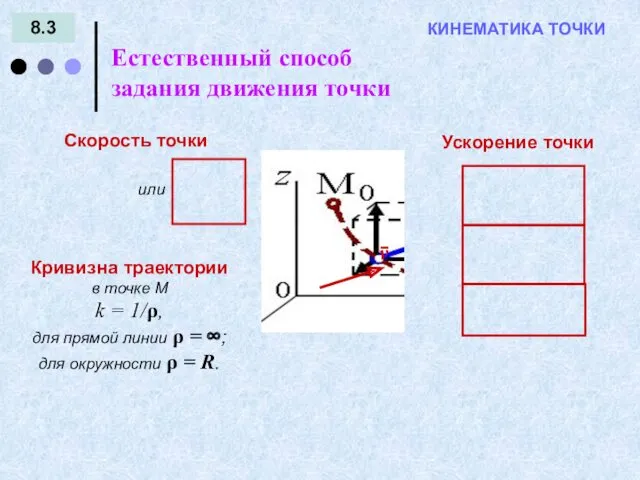
8.3
КИНЕМАТИКА ТОЧКИ
Естественный способ задания движения точки
Скорость точки
или
Кривизна траектории
в
8.3
КИНЕМАТИКА ТОЧКИ
Естественный способ задания движения точки
Скорость точки
или
Кривизна траектории
в
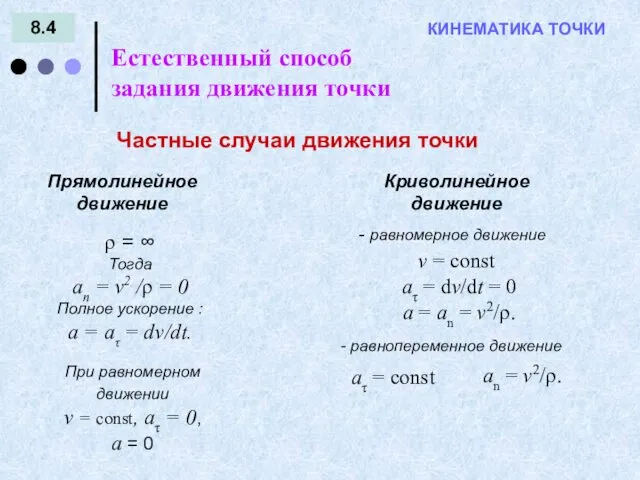
8.4
КИНЕМАТИКА ТОЧКИ
Естественный способ задания движения точки
Частные случаи движения точки
8.4
КИНЕМАТИКА ТОЧКИ
Естественный способ задания движения точки
Частные случаи движения точки
ЛЕКЦИЯ 9 План:
9.1
МЕХАНИКА
9.1. Поступательное движение тела.
9.2. Вращение твёрдого тела вокруг
ЛЕКЦИЯ 9 План:
9.1
МЕХАНИКА
9.1. Поступательное движение тела.
9.2. Вращение твёрдого тела вокруг
9.2
Поступательное движение тела
Простейшие движения твердого тела
Свойства поступательного движения:
Все точки тела
9.2
Поступательное движение тела
Простейшие движения твердого тела
Свойства поступательного движения:
Все точки тела
9.3
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
= -
Простейшие движения твердого тела
Вращательным
9.3
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
= -
Простейшие движения твердого тела
Вращательным
9.4
= -
Простейшие движения твердого тела
Угловая скорость тела
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА
9.4
= -
Простейшие движения твердого тела
Угловая скорость тела
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА
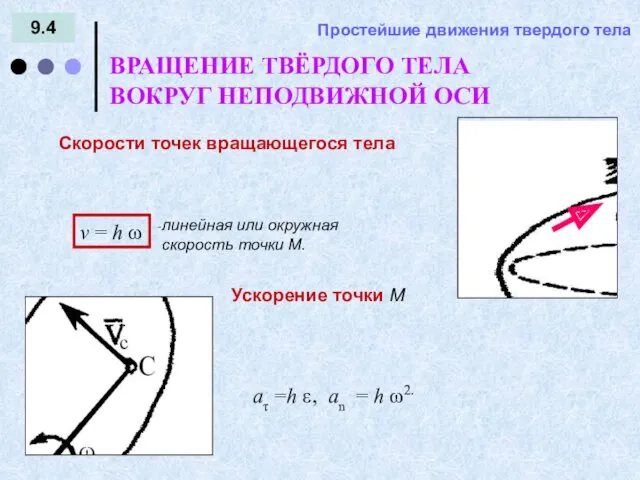
9.4
= -
Простейшие движения твердого тела
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Скорости
9.4
= -
Простейшие движения твердого тела
ВРАЩЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Скорости
ЛЕКЦИЯ 10 План:
10.1
МЕХАНИКА
10.1. Основные определения.
10.2. Теорема о сложении скоростей (теорема Кориолиса).
Модуль
ЛЕКЦИЯ 10 План:
10.1
МЕХАНИКА
10.1. Основные определения.
10.2. Теорема о сложении скоростей (теорема Кориолиса).
Модуль
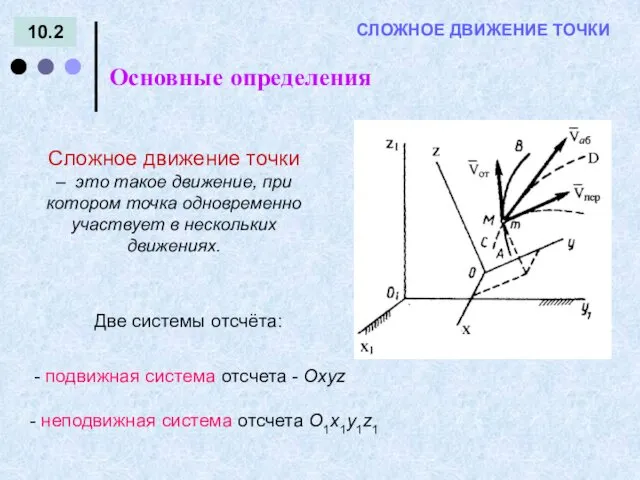
10.2
Основные определения
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Сложное движение точки
–
10.2
Основные определения
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Сложное движение точки
–
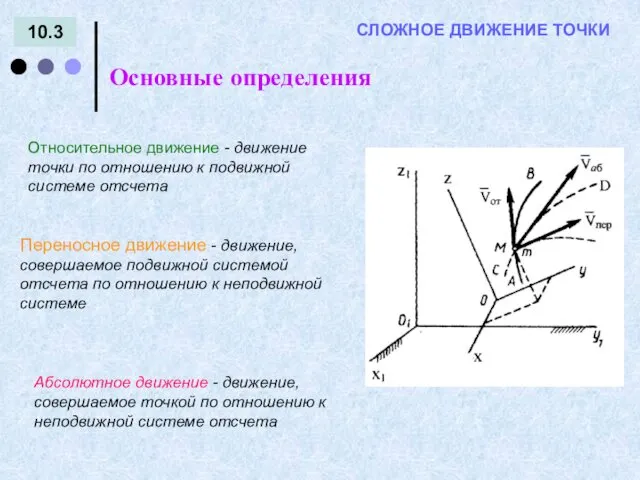
10.3
Основные определения
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
).
Переносное движение -
10.3
Основные определения
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
).
Переносное движение -
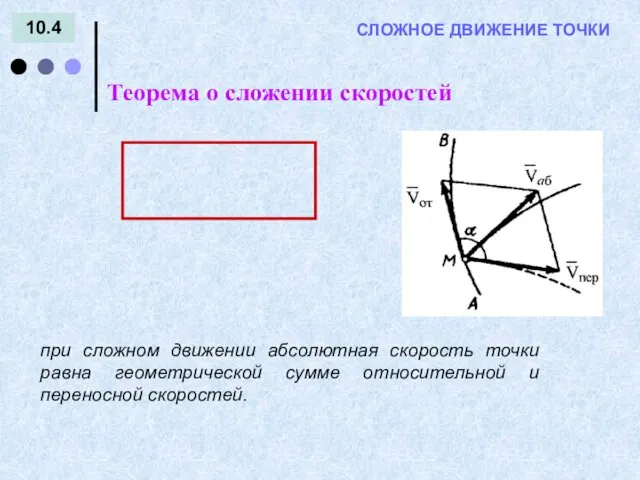
10.4
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Теорема о сложении скоростей
при сложном движении
10.4
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Теорема о сложении скоростей
при сложном движении
ЛЕКЦИЯ 8 План:
11.1
МЕХАНИКА
11.1. Теорема о сложении ускорений.
11.2. Ускорение Кориолиса.
КИНЕМАТИКА
Модуль 1
ТЕОРЕТИЧЕСКАЯ
ЛЕКЦИЯ 8 План:
11.1
МЕХАНИКА
11.1. Теорема о сложении ускорений.
11.2. Ускорение Кориолиса.
КИНЕМАТИКА
Модуль 1
ТЕОРЕТИЧЕСКАЯ
11.2
= -
ТЕОРЕМА О СЛОЖЕНИИ УСКОРЕНИЙ (ТЕОРЕМА КОРИОЛИСА)
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
11.2
= -
ТЕОРЕМА О СЛОЖЕНИИ УСКОРЕНИЙ (ТЕОРЕМА КОРИОЛИСА)
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
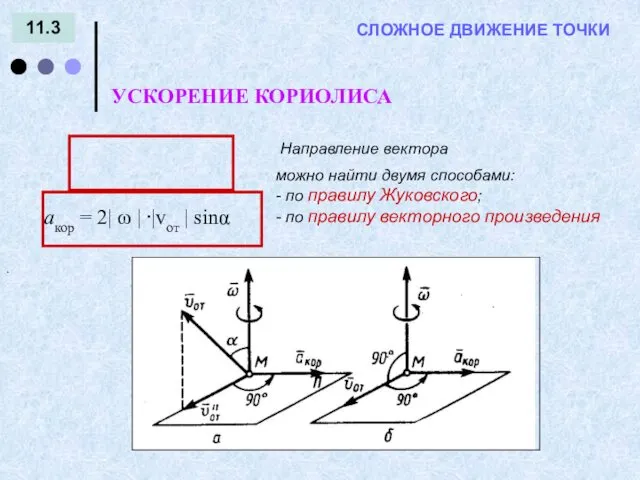
11.3
= -
УСКОРЕНИЕ КОРИОЛИСА
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
.
aкор =
11.3
= -
УСКОРЕНИЕ КОРИОЛИСА
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
.
aкор =
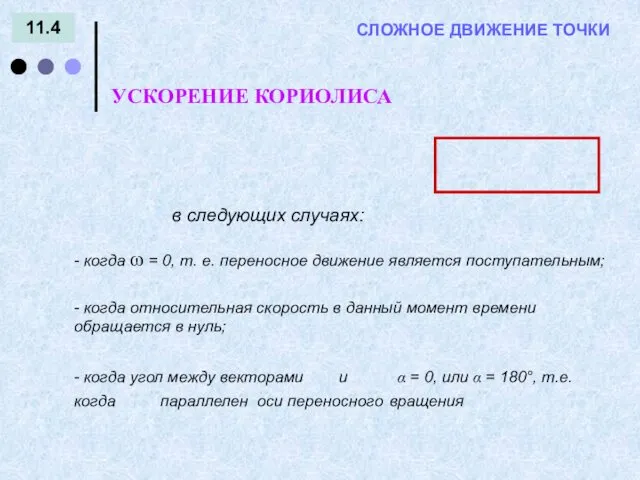
11.4
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
- когда угол между векторами и
11.4
= -
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
- когда угол между векторами и
ЛЕКЦИЯ 12 План:
12.1
МЕХАНИКА
12.1. Понятие плоскопараллельного движения тела
12.2. Определение скоростей точек плоской
ЛЕКЦИЯ 12 План:
12.1
МЕХАНИКА
12.1. Понятие плоскопараллельного движения тела
12.2. Определение скоростей точек плоской
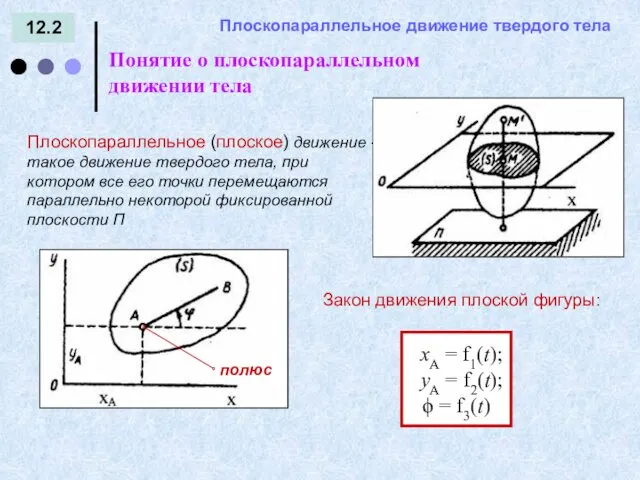
12.2
= -
Понятие о плоскопараллельном движении тела
Плоскопараллельное движение твердого тела
12.2
= -
Понятие о плоскопараллельном движении тела
Плоскопараллельное движение твердого тела
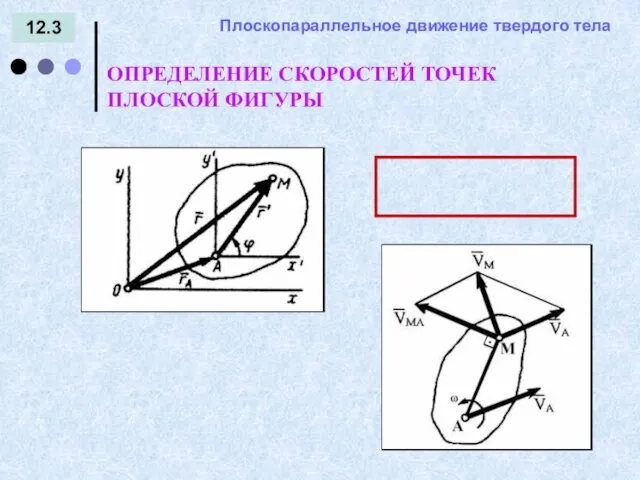
12.3
= -
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Плоскопараллельное движение твердого тела
12.3
= -
ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Плоскопараллельное движение твердого тела
12.4
= -
ТЕОРЕМА О ПРОЕКЦИЯХ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Плоскопараллельное движение
12.4
= -
ТЕОРЕМА О ПРОЕКЦИЯХ СКОРОСТЕЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Плоскопараллельное движение
12.5
= -
Понятие МЦС и способы его нахождения
Плоскопараллельное движение твердого тела
12.5
= -
Понятие МЦС и способы его нахождения
Плоскопараллельное движение твердого тела
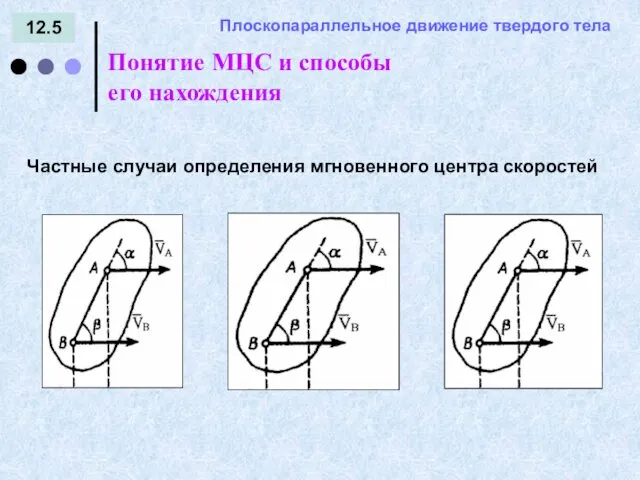
12.5
= -
Понятие МЦС и способы его нахождения
Плоскопараллельное движение твердого тела
12.5
= -
Понятие МЦС и способы его нахождения
Плоскопараллельное движение твердого тела

ЛЕКЦИЯ 13 План:
13.1
МЕХАНИКА
13.1. Определение ускорений точек плоской фигуры
13.2. Мгновенный центр ускорений
Модуль
ЛЕКЦИЯ 13 План:
13.1
МЕХАНИКА
13.1. Определение ускорений точек плоской фигуры
13.2. Мгновенный центр ускорений
Модуль
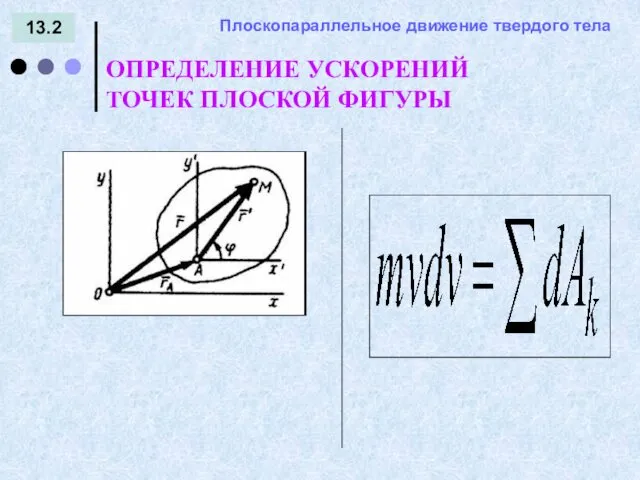
13.2
= -
ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Плоскопараллельное движение твердого тела
13.2
= -
ОПРЕДЕЛЕНИЕ УСКОРЕНИЙ ТОЧЕК ПЛОСКОЙ ФИГУРЫ
Плоскопараллельное движение твердого тела
13.3
= -
МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
Плоскопараллельное движение твердого тела
Точка, ускорение которой
13.3
= -
МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
Плоскопараллельное движение твердого тела
Точка, ускорение которой
13.3
= -
МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
Плоскопараллельное движение твердого тела
tg μ =
13.3
= -
МГНОВЕННЫЙ ЦЕНТР УСКОРЕНИЙ
Плоскопараллельное движение твердого тела
tg μ =
МЕХАНИКА
МЕХАНИКА
ЛЕКЦИЯ 14 План:
14.1
МЕХАНИКА
14.1. Основные законы механики
14.2. Дифференциальные уравнения движения материальной точки
ЛЕКЦИЯ 14 План:
14.1
МЕХАНИКА
14.1. Основные законы механики
14.2. Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
14.2
ОБЩИЕ СВЕДЕНИЯ
Динамика - это раздел механики, в котором изучается движение
ДИНАМИКА ТОЧКИ
14.2
ОБЩИЕ СВЕДЕНИЯ
Динамика - это раздел механики, в котором изучается движение
14.3
ОБЩИЕ СВЕДЕНИЯ
ДИНАМИКА ТОЧКИ
14.3
ОБЩИЕ СВЕДЕНИЯ
ДИНАМИКА ТОЧКИ
14.4
Дифференциальные уравнения движения материальной точки
Дифференциальные уравнения движения точки
в
14.4
Дифференциальные уравнения движения материальной точки
Дифференциальные уравнения движения точки
в
14.5
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Дифференциальные уравнения в проекциях на
14.5
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Дифференциальные уравнения в проекциях на
ЛЕКЦИЯ 15 План:
15.1
МЕХАНИКА
15.1. Две задачи динамики.
15.2. Решение задач
ДИНАМИКА ТОЧКИ
Модуль
ЛЕКЦИЯ 15 План:
15.1
МЕХАНИКА
15.1. Две задачи динамики.
15.2. Решение задач
ДИНАМИКА ТОЧКИ
Модуль
15.2
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
ДВЕ ЗАДАЧИ ДИНАМИКИ
Первая задача
15.2
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
ДВЕ ЗАДАЧИ ДИНАМИКИ
Первая задача
15.3
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Решение задач динамики точки:
Первая
15.3
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Решение задач динамики точки:
Первая
15.4
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Лифт весом Р начинает подъем
15.4
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Лифт весом Р начинает подъем
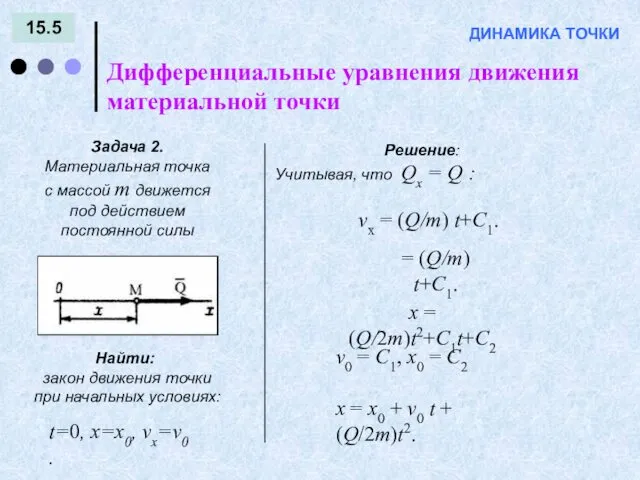
15.5
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Задача 2. Материальная точка с
15.5
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Задача 2. Материальная точка с
ЛЕКЦИЯ 16 План:
16.1
МЕХАНИКА
16.1. Свободные прямолинейные колебания материальной точки
16.2. Влияние постоянной силы
ЛЕКЦИЯ 16 План:
16.1
МЕХАНИКА
16.1. Свободные прямолинейные колебания материальной точки
16.2. Влияние постоянной силы
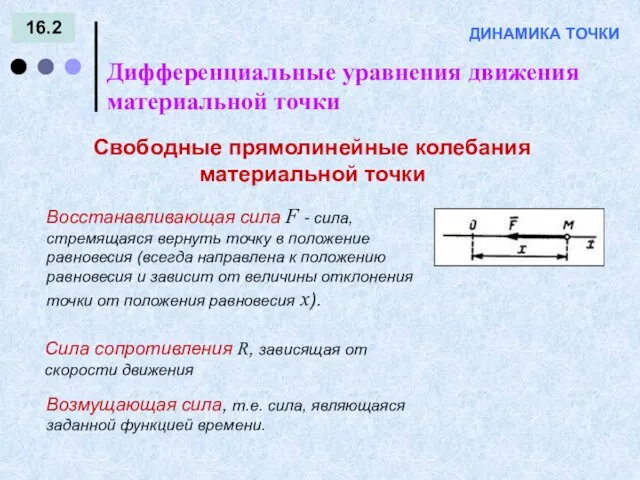
16.2
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Свободные прямолинейные колебания материальной точки
Сила
16.2
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Свободные прямолинейные колебания материальной точки
Сила
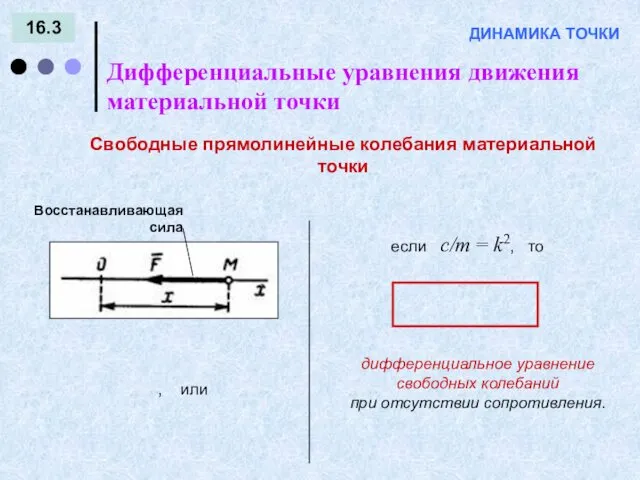
16.3
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Свободные прямолинейные колебания материальной точки
16.3
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Свободные прямолинейные колебания материальной точки
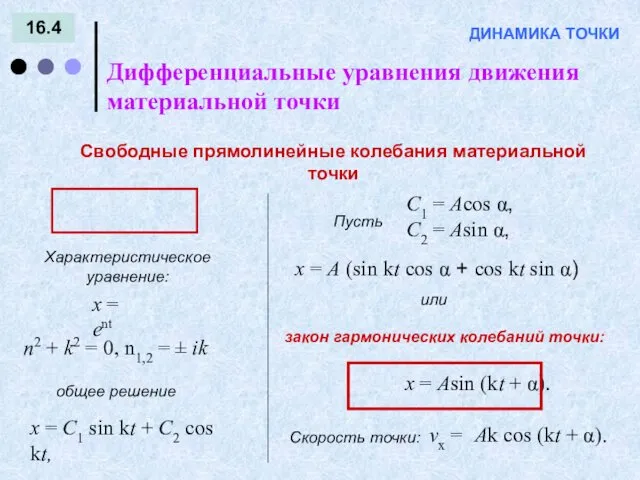
16.4
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Характеристическое уравнение:
x = ent
Свободные
16.4
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Характеристическое уравнение:
x = ent
Свободные
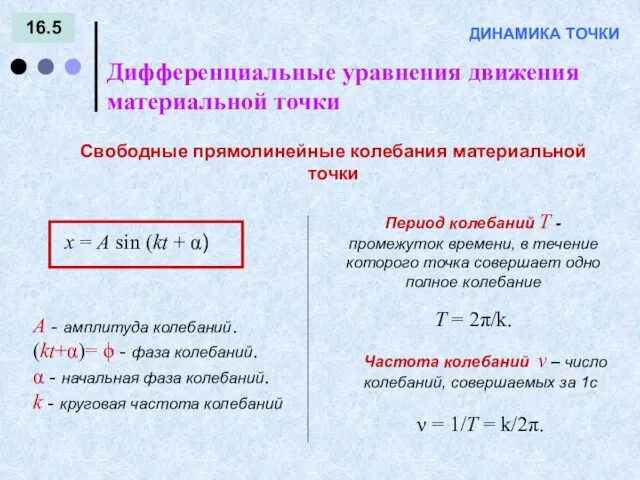
16.5
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Свободные прямолинейные колебания материальной точки
A
16.5
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Свободные прямолинейные колебания материальной точки
A
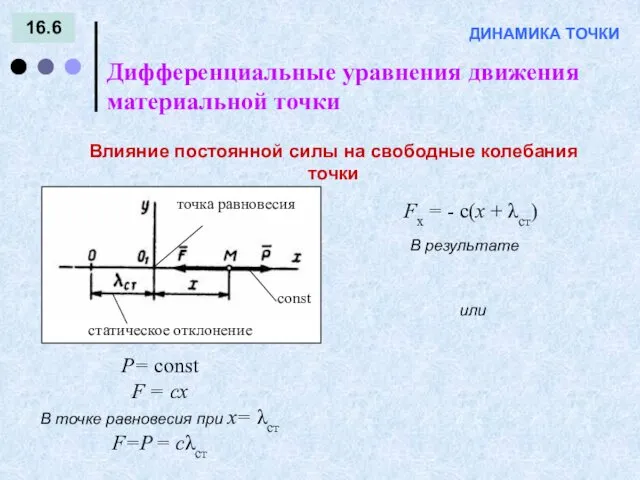
16.6
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Влияние постоянной силы на свободные
16.6
Дифференциальные уравнения движения материальной точки
ДИНАМИКА ТОЧКИ
Влияние постоянной силы на свободные
МЕХАНИКА
МЕХАНИКА
ЛЕКЦИЯ 17 План:
17.1
МЕХАНИКА
17.1. Введение в динамику системы. Свойства внутренних сил.
17.2. Центр
ЛЕКЦИЯ 17 План:
17.1
МЕХАНИКА
17.1. Введение в динамику системы. Свойства внутренних сил.
17.2. Центр
17.2
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Введение в динамику системы
17.2
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Введение в динамику системы
17.3
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Центр масс механической системы
Масса
17.3
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Центр масс механической системы
Масса
17.4
ТЕОРЕМА
О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
— ускорение центра масс
17.4
ТЕОРЕМА
О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
— ускорение центра масс
17.5
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Закон сохранения движения центра
17.5
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Закон сохранения движения центра
17.6
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Примеры применения теоремы о
17.6
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Примеры применения теоремы о
ЛЕКЦИЯ 18 План:
18.1
МЕХАНИКА
18.1. Количество движения.
18.2. Импульс силы.
18.3. Теорема об
ЛЕКЦИЯ 18 План:
18.1
МЕХАНИКА
18.1. Количество движения.
18.2. Импульс силы.
18.3. Теорема об
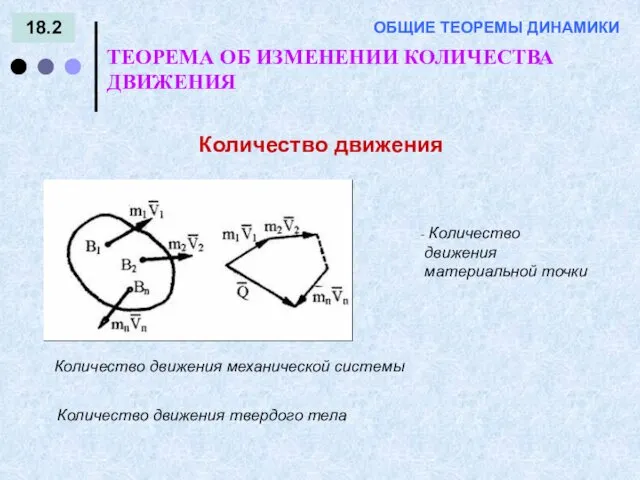
18.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Количество движения
Количество
движения
18.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Количество движения
Количество
движения
18.3
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Импульс силы
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
Единицей измерения импульса
18.3
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Импульс силы
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
Единицей измерения импульса
18.4
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
Дифференциальное уравнение движения точки
18.4
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
Дифференциальное уравнение движения точки
18.5
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
Для всех точек механической системы
Теорема
18.5
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
Для всех точек механической системы
Теорема
17.10
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Закон сохранения количества движения
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
1.
17.10
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Закон сохранения количества движения
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
1.
ЛЕКЦИЯ 19 План:
19.1
МЕХАНИКА
19.1. Осевые моменты инерции тела.
19.2. Момент количества движения
ЛЕКЦИЯ 19 План:
19.1
МЕХАНИКА
19.1. Осевые моменты инерции тела.
19.2. Момент количества движения
19.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Осевые моменты инерции тела
19.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Осевые моменты инерции тела
19.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Момент количества движения материальной
19.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Момент количества движения материальной
19.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Теорема об изменении
момента
19.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Теорема об изменении
момента
ЛЕКЦИЯ 20 План:
20.1
МЕХАНИКА
20.1. Теорема об изменении кинетического момента.
20.2. Дифференциальное уравнение вращения
ЛЕКЦИЯ 20 План:
20.1
МЕХАНИКА
20.1. Теорема об изменении кинетического момента.
20.2. Дифференциальное уравнение вращения
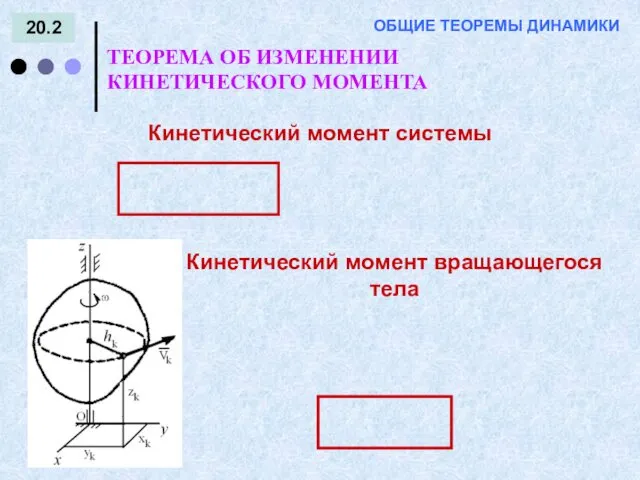
20.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Кинетический момент системы
Кинетический момент
20.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Кинетический момент системы
Кинетический момент
20.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Теорема об изменении кинетического
20.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Теорема об изменении кинетического
20.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
следствия из теоремы:
20.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
следствия из теоремы:
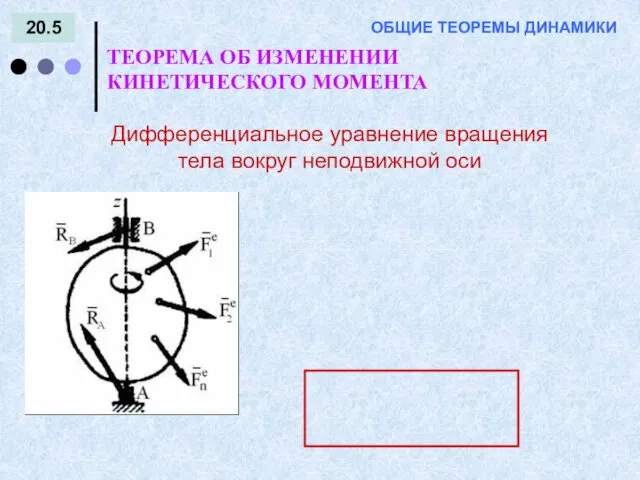
20.5
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Дифференциальное уравнение вращения тела
20.5
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО МОМЕНТА
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Дифференциальное уравнение вращения тела
ЛЕКЦИЯ 21 План:
21.1
МЕХАНИКА
21.1. Работа силы и мощность
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Модуль
ЛЕКЦИЯ 21 План:
21.1
МЕХАНИКА
21.1. Работа силы и мощность
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Модуль
21.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Элементарная
21.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Элементарная
21.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Если
21.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Если
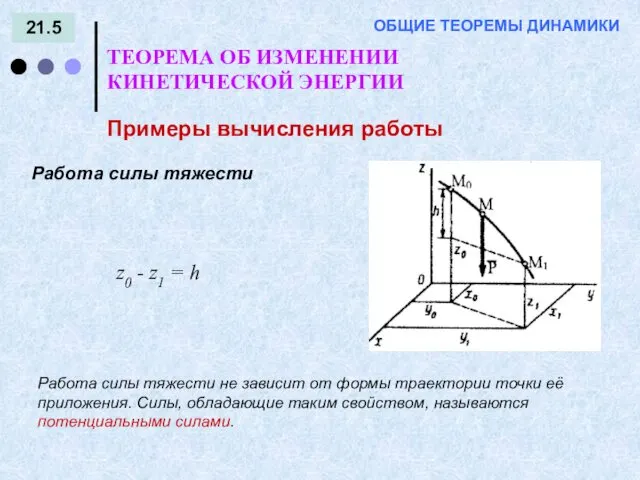
21.5
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Примеры вычисления работы
Работа
21.5
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Примеры вычисления работы
Работа
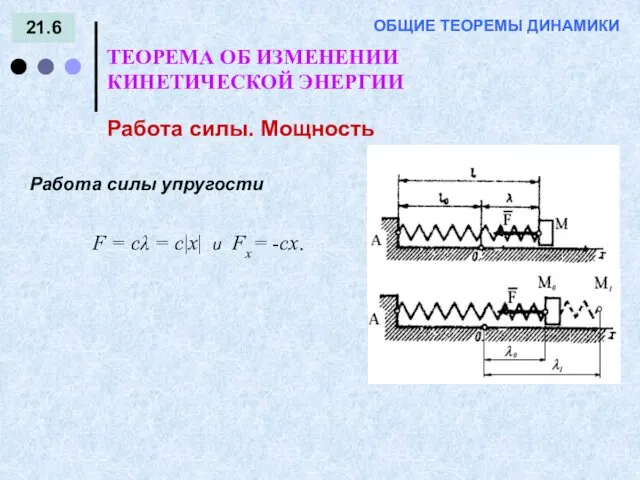
21.6
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Работа
21.6
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Работа
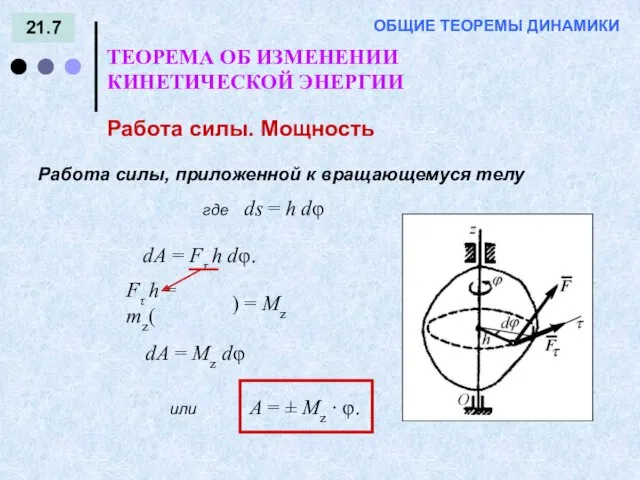
21.7
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Работа
21.7
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Работа силы. Мощность
Работа
ЛЕКЦИЯ 22 План:
22.1
МЕХАНИКА
22.1. Кинетическая энергия.
22.2. Теорема об изменении кинетической энергии
ОБЩИЕ
ЛЕКЦИЯ 22 План:
22.1
МЕХАНИКА
22.1. Кинетическая энергия.
22.2. Теорема об изменении кинетической энергии
ОБЩИЕ
22.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
для материальной точки
Кинетическая
22.2
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
для материальной точки
Кинетическая
22.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Кинетическая энергия
для твердого тела
22.3
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Кинетическая энергия
для твердого тела
22.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
maτ = ∑Fkτ.
Рассмотрим материальную
22.4
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
maτ = ∑Fkτ.
Рассмотрим материальную
22.5
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Рассмотрим материальную точку механической
22.5
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
Рассмотрим материальную точку механической

МЕХАНИКА
ЛЕКЦИЯ 26
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
УРАВНЕНИЯ ЛАГРАНЖА
ПРИНЦИП ДАЛАМБЕРА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
ЛЕКЦИЯ
МЕХАНИКА
ЛЕКЦИЯ 26
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
УРАВНЕНИЯ ЛАГРАНЖА
ПРИНЦИП ДАЛАМБЕРА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
ЛЕКЦИЯ
ЛЕКЦИЯ 23 План:
23.1
МЕХАНИКА
23.1. Сила инерции.
23.2. Принцип Даламбера для материальной точки
ЛЕКЦИЯ 23 План:
23.1
МЕХАНИКА
23.1. Сила инерции.
23.2. Принцип Даламбера для материальной точки
23.2
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Рассмотрим движение материальной точки М
Сила инерции материальной точки направлена
23.2
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Рассмотрим движение материальной точки М
Сила инерции материальной точки направлена
23.3
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Рассмотрим материальную точку механической системы:
для всех точек полученная
23.3
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Рассмотрим материальную точку механической системы:
для всех точек полученная

23.4
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Главный вектор и главный момент сил инерции механической системы
23.4
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Главный вектор и главный момент сил инерции механической системы
23.5
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Частные случаи приведения сил инерции твердого тела
1. Поступательное
23.5
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Частные случаи приведения сил инерции твердого тела
1. Поступательное
23.5
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Динамические реакции вращающегося тела
23.5
ПРИНЦИП ДАЛАМБЕРА
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Динамические реакции вращающегося тела
ЛЕКЦИЯ 24 План:
24.1
МЕХАНИКА
24.1. Классификация связей.
24.2. Возможные перемещения системы. Идеальные связи.
24.3.
ЛЕКЦИЯ 24 План:
24.1
МЕХАНИКА
24.1. Классификация связей.
24.2. Возможные перемещения системы. Идеальные связи.
24.3.
24.2
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Классификация связей
Связи - это любого вида ограничения,
24.2
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Классификация связей
Связи - это любого вида ограничения,
Возможное перемещение механической системы - это совокупность воображаемых элементарных перемещений точек
Возможное перемещение механической системы - это совокупность воображаемых элементарных перемещений точек
24.4
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Число степеней свободы системы - это
число независимых, между
24.4
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Число степеней свободы системы - это
число независимых, между
24.5
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Для равновесия механической системы с идеальными связями необходимо
24.5
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Для равновесия механической системы с идеальными связями необходимо
ЛЕКЦИЯ 25 План:
25.1
МЕХАНИКА
25.1.Обобщённые координаты и обобщенные скорости.
25.2. Обобщённые силы.
25.3. Общее
ЛЕКЦИЯ 25 План:
25.1
МЕХАНИКА
25.1.Обобщённые координаты и обобщенные скорости.
25.2. Обобщённые силы.
25.3. Общее
25.2
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Обобщенные координаты механической системы - независимые между собой
25.2
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Обобщенные координаты механической системы - независимые между собой
25.3
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
q1 = f1(t),
q2 = f2(t),
…………,
qs
25.3
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
q1 = f1(t),
q2 = f2(t),
…………,
qs
Пусть механическая система состоит из n материальных точек, на которые действуют
Пусть механическая система состоит из n материальных точек, на которые действуют
25.5
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Тогда, согласно принципу возможных перемещений:
Если ко всем
25.5
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Тогда, согласно принципу возможных перемещений:
Если ко всем
25.6
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Общее уравнение динамики в обобщенных координатах:
25.6
АНАЛИТИЧЕСКАЯ МЕХАНИКА
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
Общее уравнение динамики в обобщенных координатах:
ЛЕКЦИЯ 26 План:
26.1
МЕХАНИКА
26.1. Уравнения Лагранжа
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Модуль 1
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО
ЛЕКЦИЯ 26 План:
26.1
МЕХАНИКА
26.1. Уравнения Лагранжа
АНАЛИТИЧЕСКАЯ МЕХАНИКА
Модуль 1
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО
26.2
АНАЛИТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
:
Лагранж получил формулу, вычисляющую обобщенные
26.2
АНАЛИТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
:
Лагранж получил формулу, вычисляющую обобщенные
26.3
АНАЛИТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
:
Дифференциальные уравнения движения системы в
26.3
АНАЛИТИЧЕСКАЯ МЕХАНИКА
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
:
Дифференциальные уравнения движения системы в
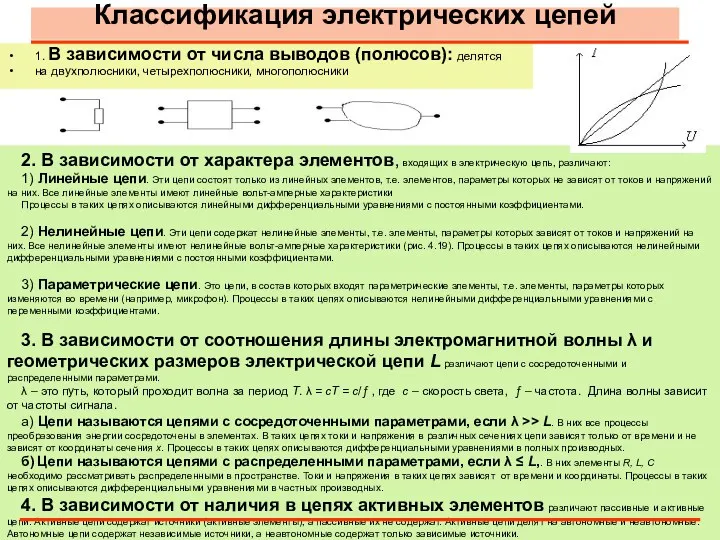 Классификация электрических цепей
Классификация электрических цепей Лабораторная работа №19: Наблюдение сплошного и линейчатого спектров различных веществ
Лабораторная работа №19: Наблюдение сплошного и линейчатого спектров различных веществ Приливы и отливы
Приливы и отливы Виды излучений. Виды спектров
Виды излучений. Виды спектров БелАЗ. Горные машины
БелАЗ. Горные машины Плавание тел
Плавание тел 20230222_urok_1_sila_treniya_drug_ili_vrag
20230222_urok_1_sila_treniya_drug_ili_vrag Альтернативные источники энергии
Альтернативные источники энергии Волновая оптика
Волновая оптика Строение ядра
Строение ядра Свободное падение тел. Равноускоренное движение
Свободное падение тел. Равноускоренное движение Основы управления денежными средствами компании
Основы управления денежными средствами компании Допуски и посадки
Допуски и посадки Построение изображения в линзе
Построение изображения в линзе Электрическое поле, его характеристики, свойства. Поле диполя. (Лекция 4)
Электрическое поле, его характеристики, свойства. Поле диполя. (Лекция 4) Простые механизмы. Рычаг
Простые механизмы. Рычаг Görüntü boyutu (10)
Görüntü boyutu (10) Солнечные батареи в космосе
Солнечные батареи в космосе Своя игра 11 класс
Своя игра 11 класс Электрическое поле. Напряжённость электрического поля
Электрическое поле. Напряжённость электрического поля Волновые уравнения Максвелла
Волновые уравнения Максвелла Фонтан Герона
Фонтан Герона Физические величины и их измерение
Физические величины и их измерение Плавление и отвердевание кристаллических тел
Плавление и отвердевание кристаллических тел Презентация по темеЭнергия. Кинетическая и потенциальная энергия. Вывод закона сохранения механической энергии
Презентация по темеЭнергия. Кинетическая и потенциальная энергия. Вывод закона сохранения механической энергии Электромагнитные волны
Электромагнитные волны Полупроводниковые кристаллы
Полупроводниковые кристаллы Система отображения РЛ информации. Сведения об индикаторных устройствах. (Тема 6.1)
Система отображения РЛ информации. Сведения об индикаторных устройствах. (Тема 6.1)