- Механические характеристики исполнительных механизмов и электродвигателей. Лекция 2

Содержание
- 2. 1. Механические характеристики исполнительных механизмов (ИМ). 2. Классификация механических характеристик электродвигателей (ЭД). 3. Понятие о статической
- 3. 2 Функциональная зависимость между статическим моментом (моментом сопротивления) и угловой скоростью называется в ЭП механической характеристикой
- 4. 3 Статические моменты исполнительных механизмов делятся на 2 класса: 1. Моменты, не зависящие от параметров движения:
- 5. 4 При x=1, механическая характеристика линейно-возрастающая (прямая 2 на рис. 1), момент сопротивления линейно зависит от
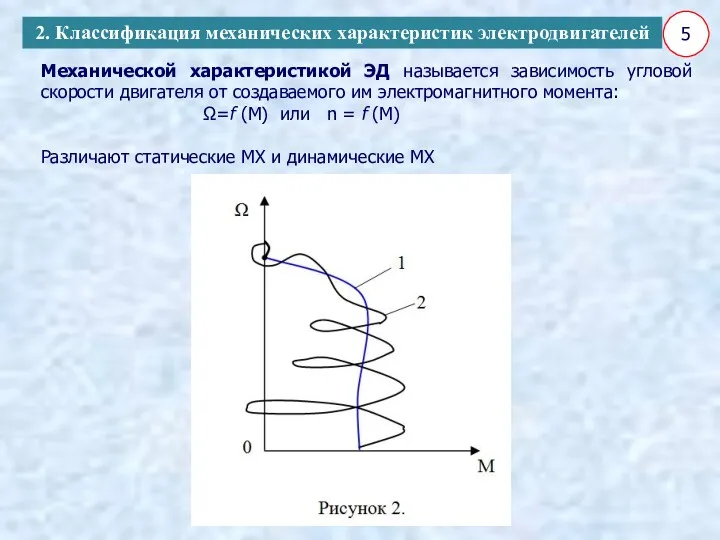
- 6. 5 Механической характеристикой ЭД называется зависимость угловой скорости двигателя от создаваемого им электромагнитного момента: Ω=f (M)
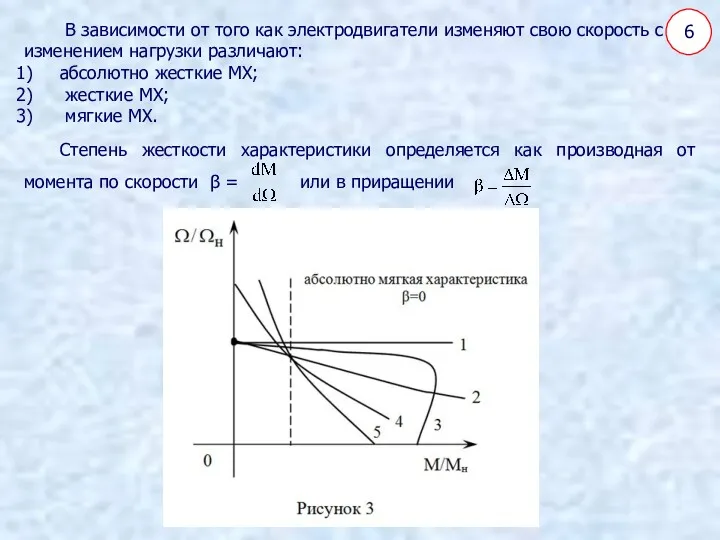
- 7. 6 В зависимости от того как электродвигатели изменяют свою скорость с изменением нагрузки различают: абсолютно жесткие
- 8. 7 Абсолютно жесткая характеристика, для которой Ω = const, β=∞. Такую характеристику имеют синхронные электродвигатели (график
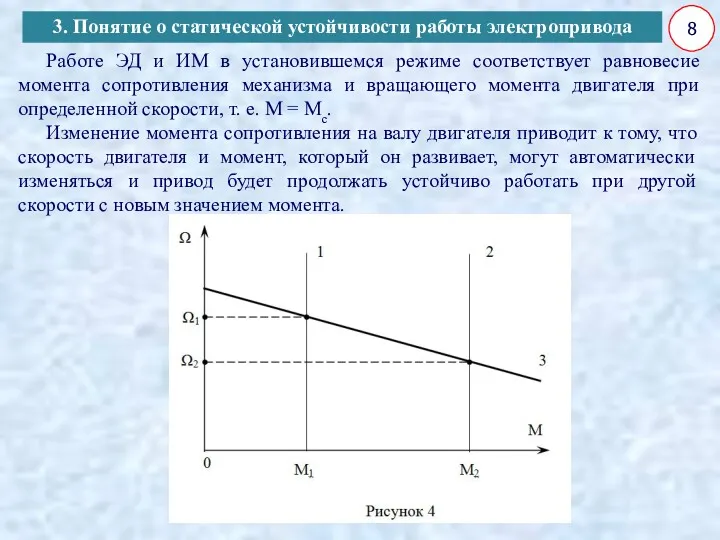
- 9. 8 3. Понятие о статической устойчивости работы электропривода Работе ЭД и ИМ в установившемся режиме соответствует
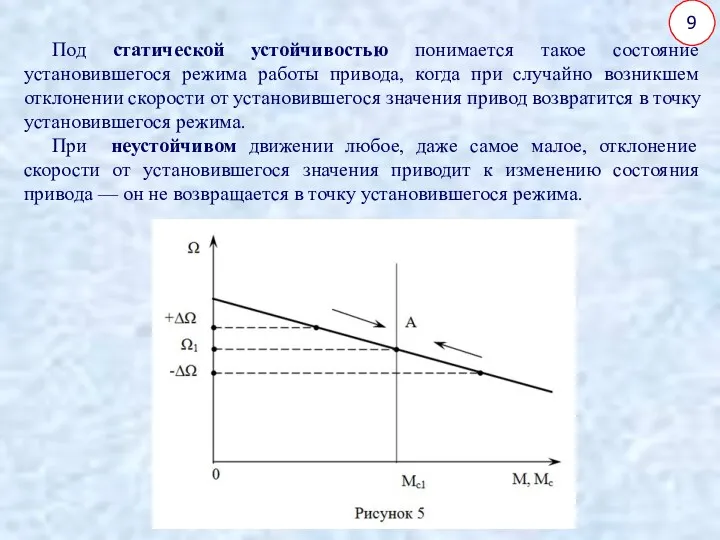
- 10. 9 Под статической устойчивостью понимается такое состояние установившегося режима работы привода, когда при случайно возникшем отклонении
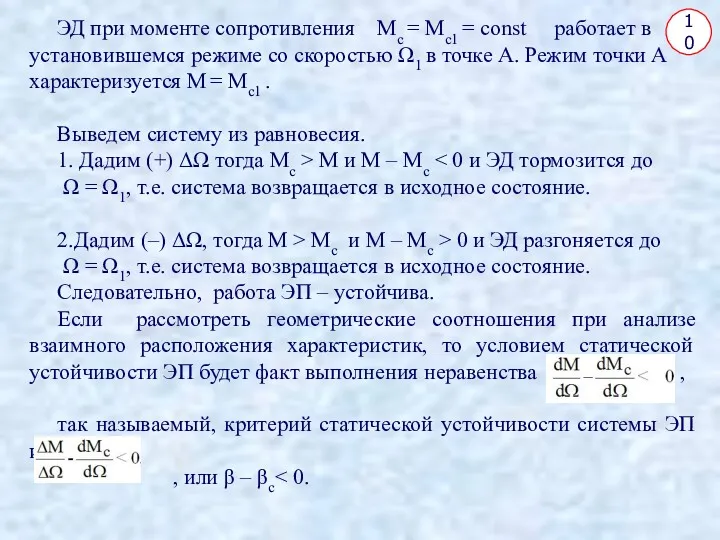
- 11. 10 ЭД при моменте сопротивления Мс = Мс1 = const работает в установившемся режиме со скоростью
- 13. Скачать презентацию
1. Механические характеристики исполнительных механизмов (ИМ).
2. Классификация механических характеристик электродвигателей (ЭД).
3.
1. Механические характеристики исполнительных механизмов (ИМ).
2. Классификация механических характеристик электродвигателей (ЭД).
3.
2
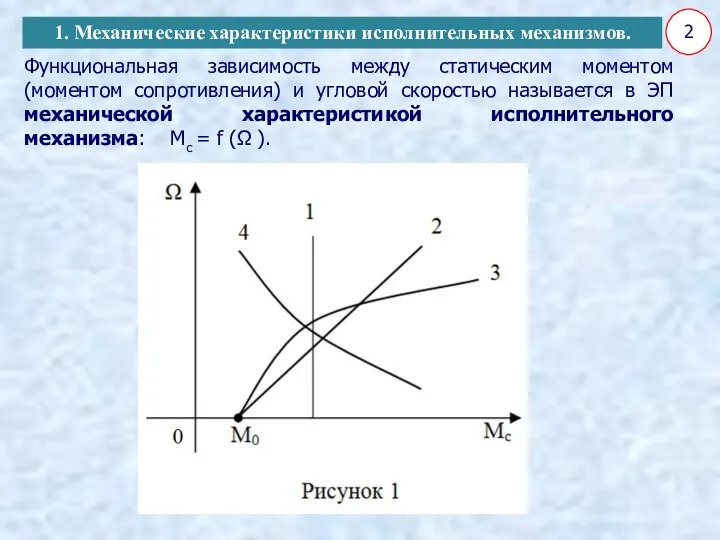
Функциональная зависимость между статическим моментом (моментом сопротивления) и угловой скоростью называется
2
Функциональная зависимость между статическим моментом (моментом сопротивления) и угловой скоростью называется
3
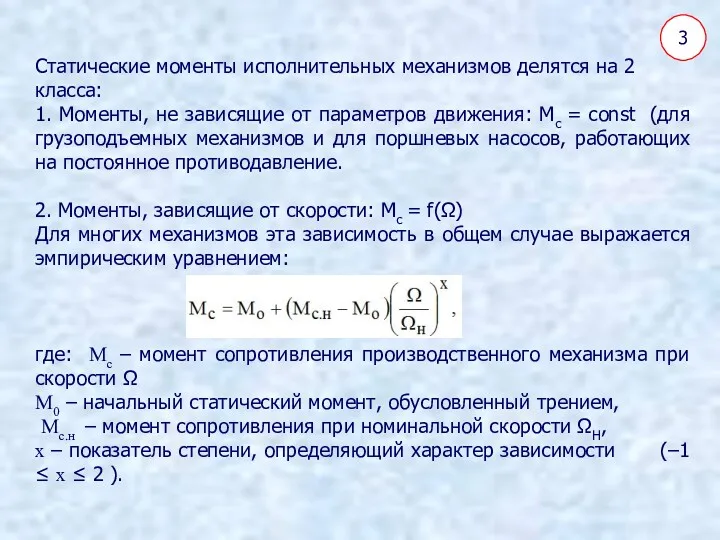
Статические моменты исполнительных механизмов делятся на 2 класса:
1. Моменты, не
3
Статические моменты исполнительных механизмов делятся на 2 класса:
1. Моменты, не
4
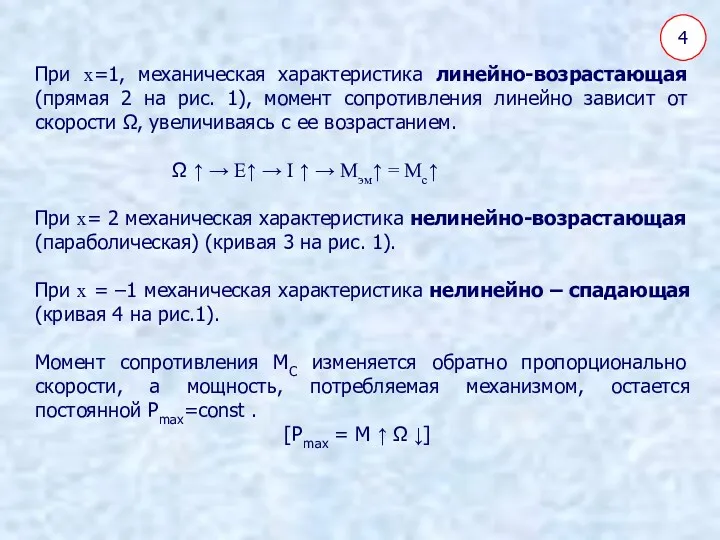
При x=1, механическая характеристика линейно-возрастающая (прямая 2 на рис. 1),
4
При x=1, механическая характеристика линейно-возрастающая (прямая 2 на рис. 1),
5
Механической характеристикой ЭД называется зависимость угловой скорости двигателя от создаваемого
5
Механической характеристикой ЭД называется зависимость угловой скорости двигателя от создаваемого
6
В зависимости от того как электродвигатели изменяют свою скорость с
6
В зависимости от того как электродвигатели изменяют свою скорость с
7
Абсолютно жесткая характеристика, для которой
Ω = const, β=∞.
Такую характеристику имеют
7
Абсолютно жесткая характеристика, для которой
Ω = const, β=∞.
Такую характеристику имеют
8
3. Понятие о статической устойчивости работы электропривода
Работе ЭД и ИМ в
8
3. Понятие о статической устойчивости работы электропривода
Работе ЭД и ИМ в
9
Под статической устойчивостью понимается такое состояние установившегося режима работы привода, когда
9
Под статической устойчивостью понимается такое состояние установившегося режима работы привода, когда
10
ЭД при моменте сопротивления Мс = Мс1 = const работает в
10
ЭД при моменте сопротивления Мс = Мс1 = const работает в
 Плоскопараллельное движение твердого тела
Плоскопараллельное движение твердого тела Сопротивление материалов. Курс лекций
Сопротивление материалов. Курс лекций Робототехника. Робот-дворник
Робототехника. Робот-дворник Явление электромагнитной индукции
Явление электромагнитной индукции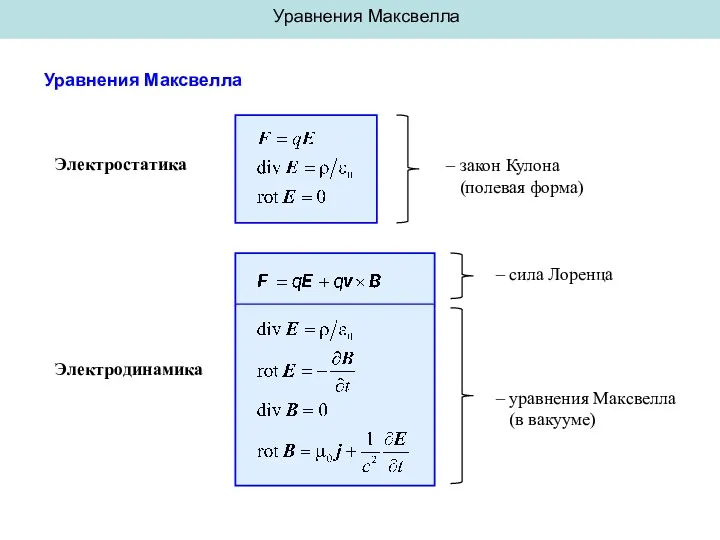 Уравнения Максвелла
Уравнения Максвелла Система автоматического управления
Система автоматического управления Следствия из уравнений Максвелла: распространение ЭМВ в пространстве, свойства ЭМВ
Следствия из уравнений Максвелла: распространение ЭМВ в пространстве, свойства ЭМВ Электротехника. Электрическое поле. Электрические и магнитные цепи. Анализ и расчет электрических цепей
Электротехника. Электрическое поле. Электрические и магнитные цепи. Анализ и расчет электрических цепей Основы аэродинамики и динамики полёта. Занятие 1
Основы аэродинамики и динамики полёта. Занятие 1 Измерение длины световой волны с помощью дифракционной решётки. Лабораторная работа №22:
Измерение длины световой волны с помощью дифракционной решётки. Лабораторная работа №22: Технология мини-исследования на уроках физики
Технология мини-исследования на уроках физики Однородный полупроводник
Однородный полупроводник Электротехника и электроника. Методы расчета сложных линейных цепей постоянного тока. (Лекция 2)
Электротехника и электроника. Методы расчета сложных линейных цепей постоянного тока. (Лекция 2) Термодинамика и теплопередача. Внутренняя энергия
Термодинамика и теплопередача. Внутренняя энергия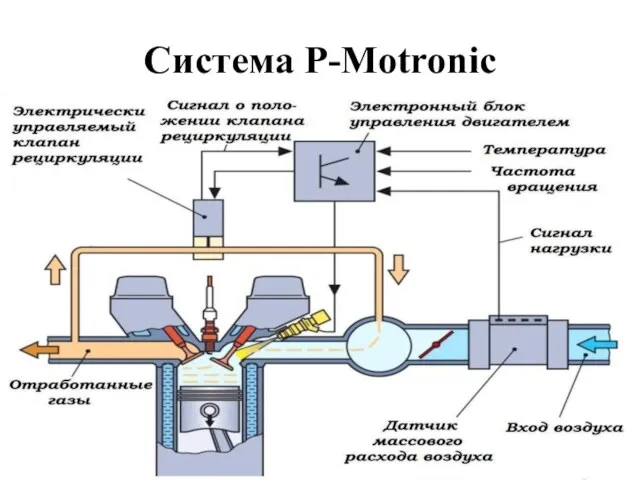 Система P-Motronic
Система P-Motronic Технический осмотр и ремонт ходовой части автомобиля. Подвеска
Технический осмотр и ремонт ходовой части автомобиля. Подвеска Урок + презентация. Тема: Сила Ампера
Урок + презентация. Тема: Сила Ампера Lektsia_7_PolyarizatsiaMalyus-Bryuster
Lektsia_7_PolyarizatsiaMalyus-Bryuster Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1)
Маломощные радиостанции КВ диапазона. Тактико-технические данные радиостанции Р-130М. (Тема 4.1) Первое начало термодинамики
Первое начало термодинамики Основы классической термодинамики. Первое начало термодинамики. (Лекция 10)
Основы классической термодинамики. Первое начало термодинамики. (Лекция 10) Динамика поступательного движения
Динамика поступательного движения Назначение и состав космического комплекса. Лекция №2
Назначение и состав космического комплекса. Лекция №2 Скорость при равномерном движении
Скорость при равномерном движении Цепи синусоидального напряжения
Цепи синусоидального напряжения Определение плотности куска мыла
Определение плотности куска мыла Изотопы. Радиоактивные превращения атомных ядер
Изотопы. Радиоактивные превращения атомных ядер Плавание тел в жидкости
Плавание тел в жидкости