Механические характеристики производственных механизмов и электрических двигателей. Лекция 2 презентация
- Механические характеристики производственных механизмов и электрических двигателей. Лекция 2

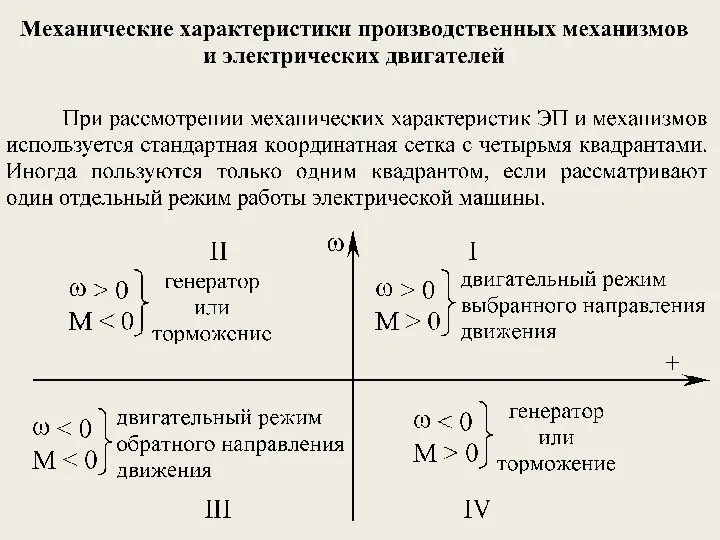
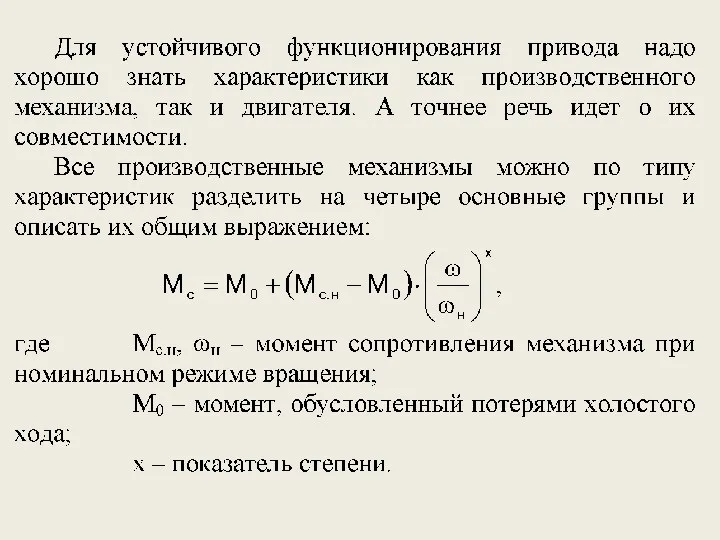
Содержание
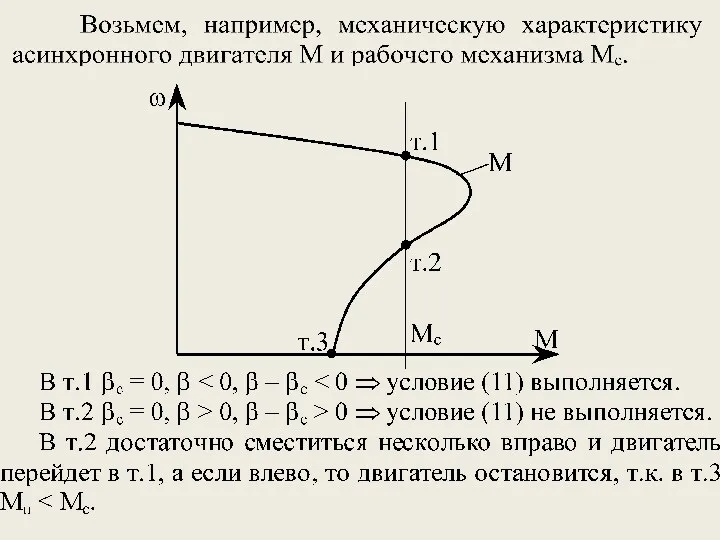
- 4. ω Мс х=0 х=1 х=2 х = –1 1. х = 0; βс = 0. 2.
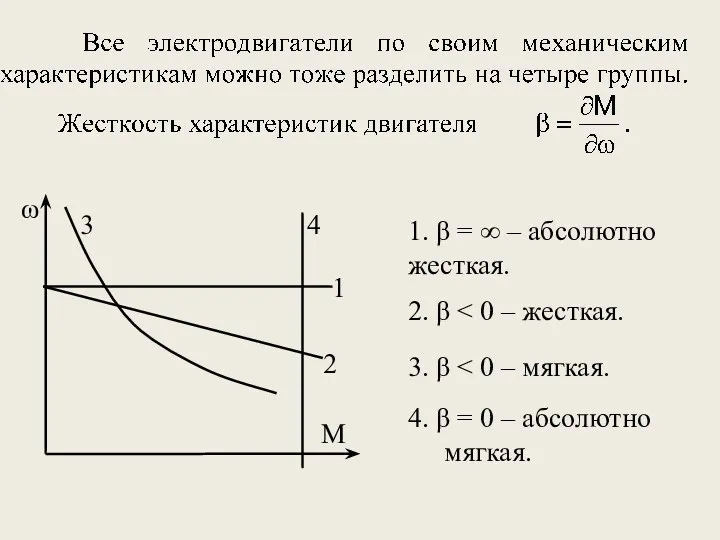
- 5. ω 1 М 2 3 4 1. β = ∞ – абсолютно жесткая. 2. β 3.
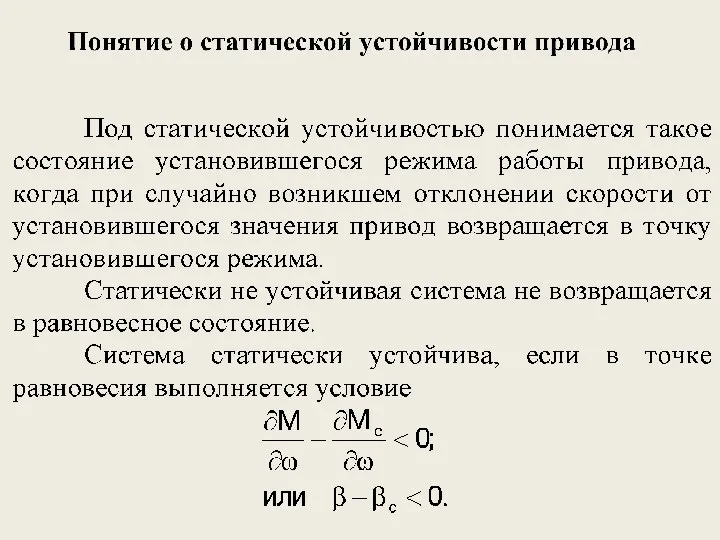
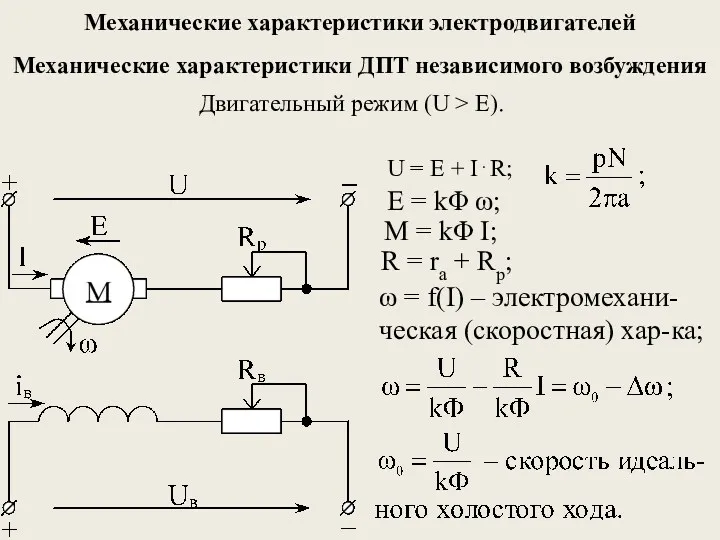
- 8. Механические характеристики электродвигателей Двигательный режим (U > E). Механические характеристики ДПТ независимого возбуждения U = E
- 9. Механическая характеристика ω = f(M).
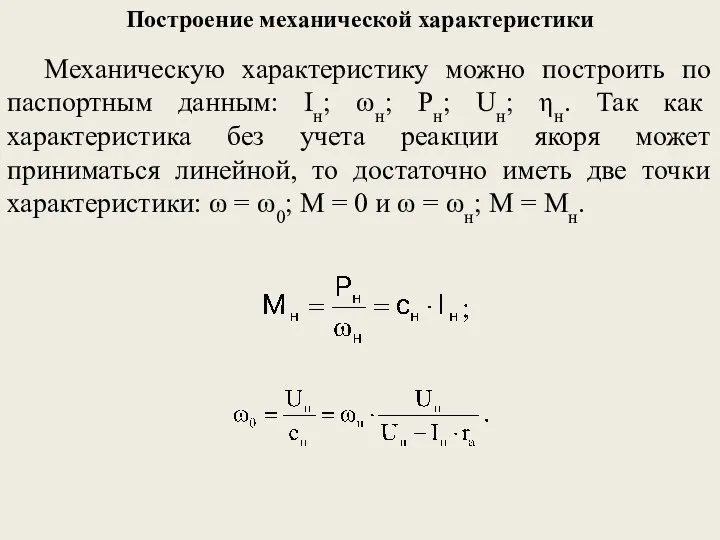
- 10. Построение механической характеристики Механическую характеристику можно построить по паспортным данным: Iн; ωн; Pн; Uн; ηн. Так
- 11. Принимается, что половина потерь в двигателе приходится на якорь, т.е. Анализ характеристик или их построение можно
- 12. Механические характеристики в тормозных режимах Существуют три вида торможения. 1. Торможение с отдачей энергии в сеть.
- 13. 2. Динамическое торможение – двигатель отключается от сети и подключается к тормозному резистору. Характеристики располагаются во
- 15. 3. Торможение противовключением или режим электромагнитного тормоза – это когда на вращающийся двигатель подается напряжение другой
- 16. Механические характеристики ДПТ последовательного возбуждения Двигательный режим Если считать в пределах ненасыщенной части кривой намагничивания Φ
- 18. Тормозные режимы 1. Механическая характеристика двигателя последовательного возбуждения не имеет пересечения с осью ω, т.е. не
- 19. 2. Режим динамического торможения аналогичен предыдущему двигателю. Но надо иметь ввиду следующую особенность. Для того, чтобы
- 20. 3. Режим противовключения возможен в двух случаях: – внешний момент больше момента Мк.з. и двигатель вращается
- 21. Механические характеристики асинхронного двигателя Двигательный режим Из Г-образной схемы замещения, приняв ,имеем R1; R′2; x1; x′2
- 22. 1. s = 0, M = 0; ω = ω0. 2. s = sн, M =
- 23. Формула Клосса Из анализа выражения (18) следует: 1. s > sкр → sкр/s ≈ 0 →
- 24. Сопротивление обмотки ротора может быть определено из условия:
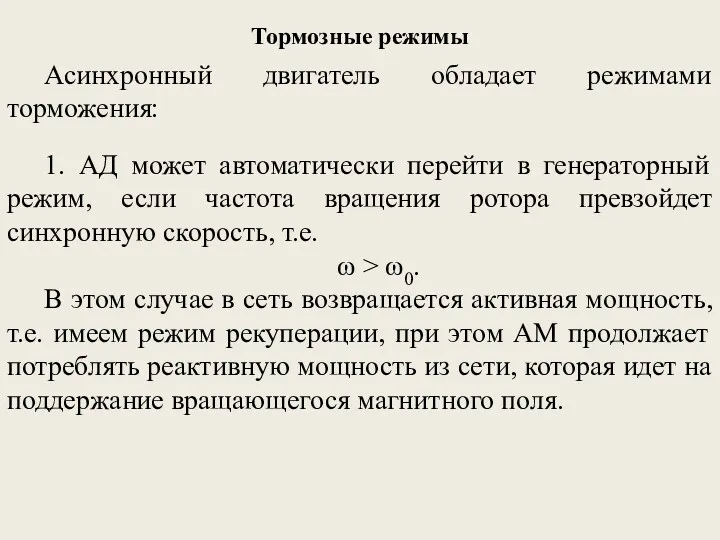
- 25. Тормозные режимы Асинхронный двигатель обладает режимами торможения: 1. АД может автоматически перейти в генераторный режим, если
- 27. 2. Динамическое торможение – двигатель отключается от сети, а на обмотку статора подается постоянное напряжение. Механическая
- 28. Механические и угловые характеристики синхронного двигателя Абсолютно жесткая (β = ∞) характеристика –Мm ≤ М ≤
- 29. Для неявнополюсной машины имеем: 0 ≤ Q ≤ 900 – рабочая часть характеристики.
- 30. Режимы торможения: 1. Рекуперация возможна, но она не дает снижения скорости. 3. Противовключение не применяется, т.к.
- 31. Регулирование угловой скорости ЭП Основные показатели регулирования 1. Диапазон регулирования: 2. Плавность регулирования: если число ступеней
- 32. Для привода переменного тока еще добавляется: – коэффициент мощности; – средневзвешанный. 4. Стабильность угловой скорости (жесткость
- 33. Можно представить график двухзонного регулирования
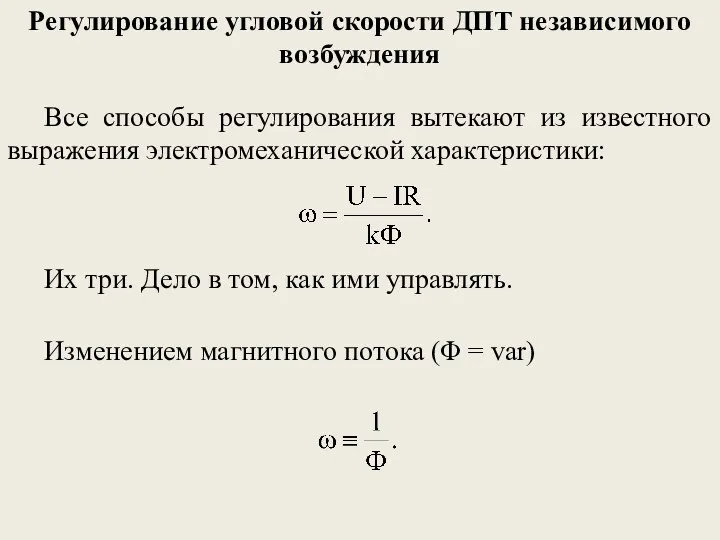
- 34. Регулирование угловой скорости ДПТ независимого возбуждения Все способы регулирования вытекают из известного выражения электромеханической характеристики: Их
- 35. Потери на возбуждение электрической машины составляют ΔPв ≈ 2÷2,5% от Рн , поэтому этот метод регулирования
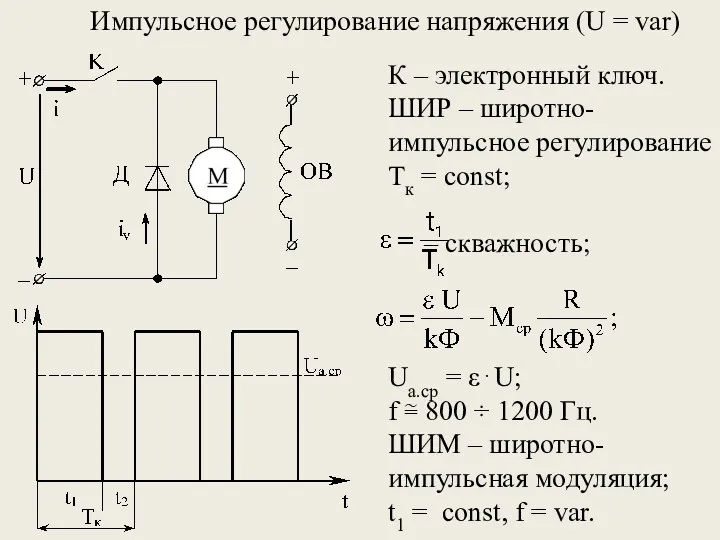
- 36. Импульсное регулирование напряжения (U = var) К – электронный ключ. ШИР – широтно-импульсное регулирование Tк =
- 37. Реостатно-импульсное регулирование
- 38. Регулирование угловой скорости ДПТ последовательного возбуждения U = var. Используется любой метод регулирова-ния подводимого напряжения: регулируемый
- 41. Регулирование угловой скорости ЭП переменного тока Все более широкое применение в электроприводах имеют асинхронные двигатели, имеющие
- 42. Известны и распространены следующие методы регулирования: реостатные; переключением числа полюсов; изменением частоты питающего напряжения; каскадным включением
- 44. Регулирование переключением числа полюсов Могут быть различ-ные варианты перек-лючения. Однако соот-ношение скоростей при этом составляет 2
- 45. Различные способы переключения дают разное число витков обмотки в фазе. В зависимости от этого получаются различные
- 46. Выпускает промышленность максимум 4хскоростные АД. В них укладывается две независимые обмотки, каждая из которых имеет две
- 47. Если при U1 = const уменьшать f1, то увеличение потока приведет к насыщению стали машины и
- 48. Способ регулиро-вания считается эко-номичным с плавным регулированием, весь-ма эффективным, но требующий дорогого оборудования – пре-образователя частоты
- 49. В данном случае часть мощности скольжения возвращается в ту же сеть. Принципиальная схема одного из примеров
- 50. Здесь M1 работает в режиме двигателя, M2 – в режиме противовключения. Их валы жестко связаны. Получаем
- 51. Другой пример, когда одна из машин работает в режиме динамического торможения. Коэффициент полезного действия в таком
- 52. Рассмотрим пример рабочего электрического вала.
- 53. Статоры M1 и M2 включены на одну сеть, фазные роторы включены встречно и параллельно им включены
- 54. Переходные режимы в ЭП Общие положения Переходным или динамическим режимом ЭП называется режим работы при переходе
- 55. Учитывая, что тепловые процессы обладают значительной инерцией, то считают их не влияющими на переходный процесс. Тогда
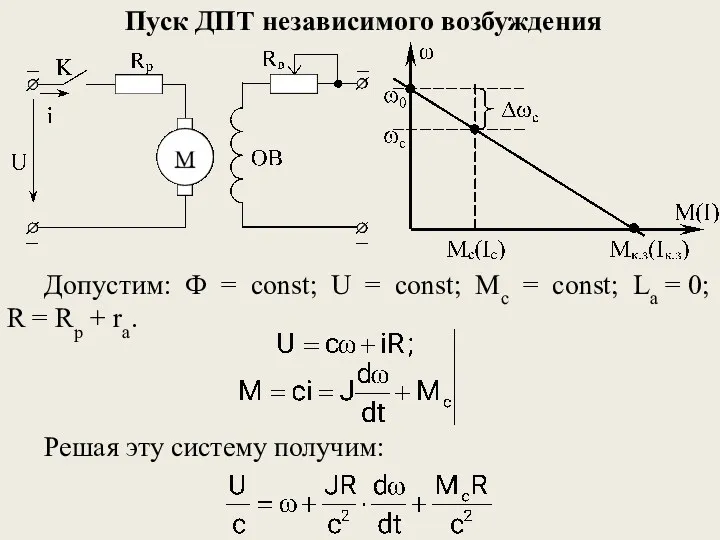
- 56. Пуск ДПТ независимого возбуждения Допустим: Ф = const; U = const; Mc = const; La =
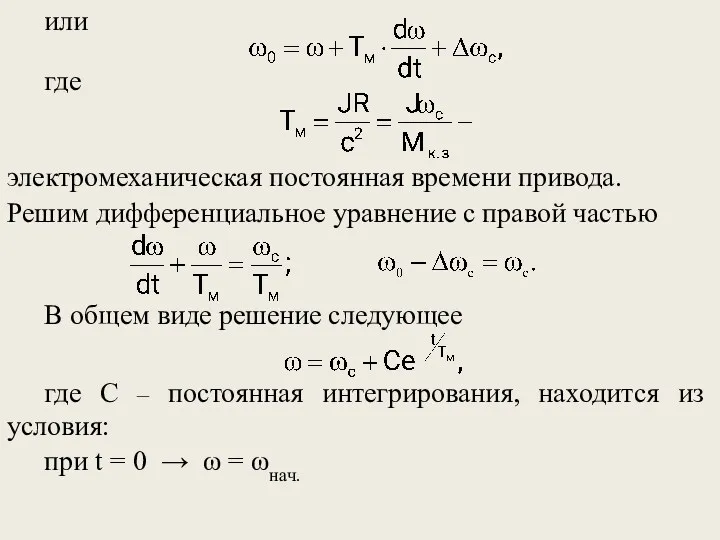
- 57. или где электромеханическая постоянная времени привода. В общем виде решение следующее где С – постоянная интегрирования,
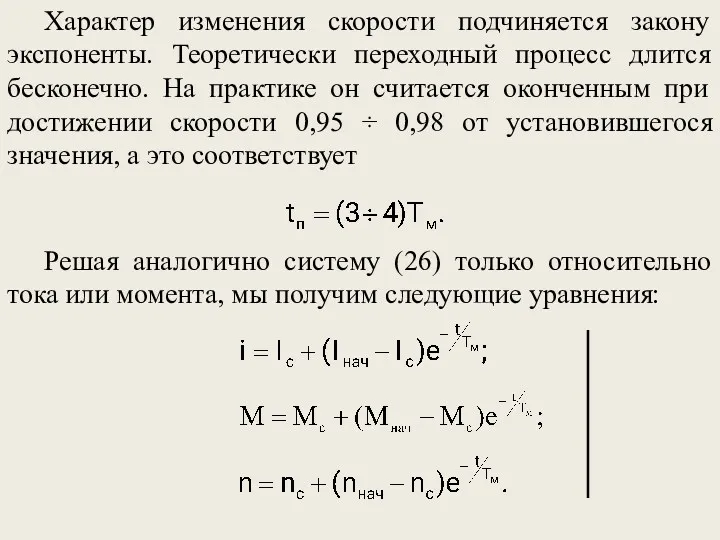
- 58. Характер изменения скорости подчиняется закону экспоненты. Теоретически переходный процесс длится бесконечно. На практике он считается оконченным
- 59. Тогда имеем пуск в общем виде: Частные случаи: – пуск двигателя при ωнач = 0 и
- 60. Рассмотрим процесс пуска во времени I1 = (2÷2,5)Iн – максимальный пусковой ток; I2 = (1,15÷1,25)Iн –
- 61. Тогда отсюда где х – ступень пуска; tx1 > tx2 > tx3; tx = (3÷4)Tм. Rx
- 62. Расчет мощности ЭП Общие положения Правильный выбор двигателя по мощности очень важен. Применение двигателя с заниженной
- 63. Для выбора мощности двигателя важно иметь графическое изображение зависимости момента сопротивления от времени называемая нагрузочной диаграммой
- 64. Потери энергии в ЭП При управлении ЭП возникают потери в электродвигателях, которые разделяют на постоянные и
- 65. Особое значение имеют потери в переходных режимах. Имеет смысл находить потери энергии за время переходного процесса,
- 66. Пуск двигателя в холостую связан с потерями в нем, равными запасенной кинетической энергии приводом. Полезная работа
- 67. – потери, выз-ванные наличием момента нагрузки. Проводя аналогичный анализ различных переходных процессов можно дать ряд рекомендаций
- 68. Общие рекомендации по снижению потерь: где m – число ступеней регулирования. При m → ∞ ΔA'П
- 69. 5.3. Классы изоляции Потери энергии в электродвигателе вызывают нагрев его отдельных элементов. Допустимый нагрев двигателя определяется
- 70. изоляция класса A νд≤105°С; изоляция класса E νд≤120°С; изоляция класса B νд≤130°С; изоляция класса F νд≤155°С;
- 71. Превышение допустимых ограничений ведет к разрушению изоляции обмоток и резкому сокращению срока эксплуатации двигателя. Так, для
- 72. 5.4. Нагревание и охлаждение двигателя Для упрощения анализа тепловых процессов в электродвигателях принимаются следующие допущения: 1)
- 73. где Q – количество теплоты, выделяемое двигателем в единицу времени, Дж/с; А – теплоотдача двигателя, Дж
- 74. – постоянная времени нагрева двигателя – время, в течение которого превышение температуры от τ = 0
- 75. Процесс нагревания или охлаждения можно считать оконченным через (3 ÷ 4) Тн или (3 ÷ 4)
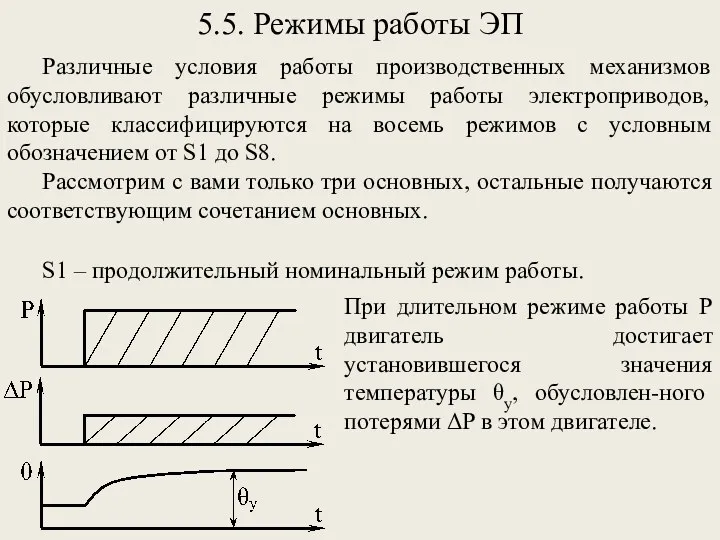
- 76. 5.5. Режимы работы ЭП Различные условия работы производственных механизмов обусловливают различные режимы работы электроприводов, которые классифицируются
- 77. это такой режим, при котором за время включенного состоя-ния tp двигатель не успевает нагреться до установившегося
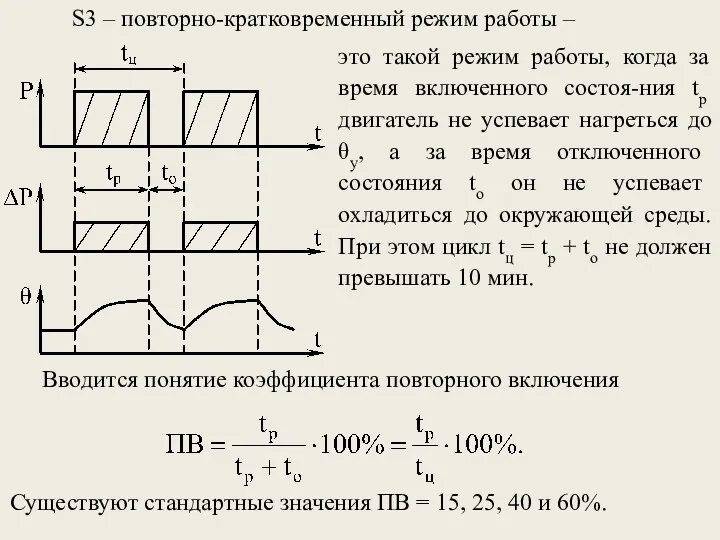
- 78. это такой режим работы, когда за время включенного состоя-ния tp двигатель не успевает нагреться до θу,
- 79. 5.6. Расчет мощности двигателя при продолжительном режиме работы (S1). Для правильного расчета мощности двигателя необходимо знать
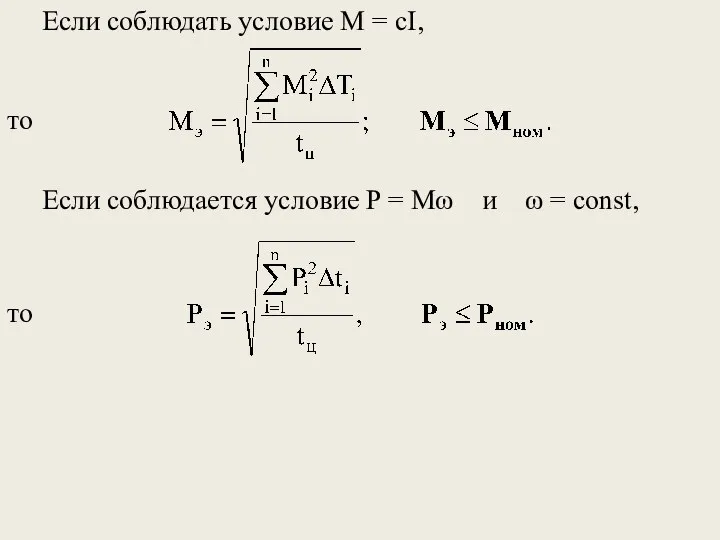
- 80. б) при переменной нагрузке. В этих случаях пользуются, чаще всего, методом средних потерь где ΔРi –
- 81. Сущность метода заключается в том, что если найденные средние потери ΔРср для выбранного двигателя не больше
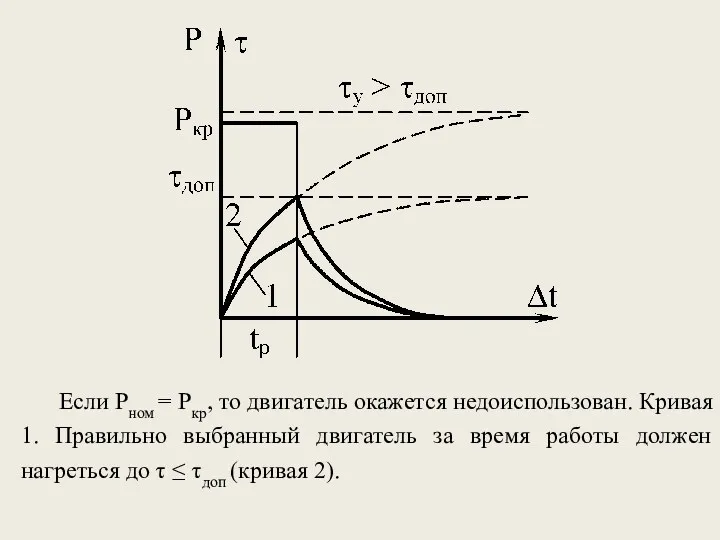
- 83. 5.7. Расчет мощности двигателя при кратковременном режиме работы Для кратковременного режима работы выпускаются специальные двигатели, имеющие
- 84. Если Рном = Ркр, то двигатель окажется недоиспользован. Кривая 1. Правильно выбранный двигатель за время работы
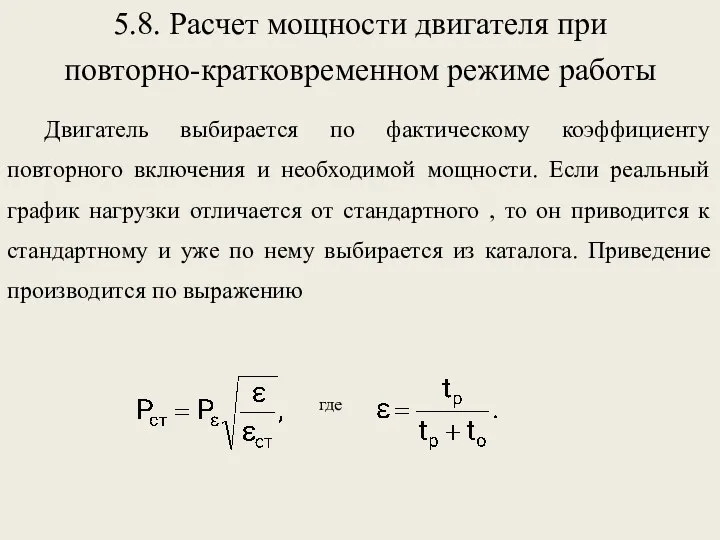
- 85. 5.8. Расчет мощности двигателя при повторно-кратковременном режиме работы Двигатель выбирается по фактическому коэффициенту повторного включения и
- 86. 6. Системы автоматического управления ЭП 6.1. Общие сведения Управление ЭП заключается в осуществлении пуска, регулирования скорости,
- 87. В системе управления ЭП используются: релейно-контактные аппараты; усилители; преобразовательные устройства и датчики; бесконтактные логические элементы; микропроцессоры
- 88. Для обеспечения чтения схем и для их проектирования имеется система условных обозначений. Различают цепи главного тока
- 89. схема соединений (монтажная) – изображается разводка проводов цепей с указанием их сечения, марок и способов их
- 90. Контактор линейный Кл имеет два типа контактов: один замыкающий, другой размыкающий. В случае а катушка Кл
- 91. обмотка компенсационная обмотка параллельного возбуждения МПТ, обмотка независимого возбуждения резистор постоянный предохранитель плавкий диод контакт замыкающий
- 92. контакт с автоматическим возвратом при перегрузке контакт замыкающий с механической связью выключатель кнопочный нажимной, с замыкающим
- 93. 6.2. Управление в функции угловой скорости (ЭДС) Управление в функции угловой скорости требует прибора контроля угловой
- 94. Кл – контактор линейный; КУ1; КУ2; КУ3 – контакторы ускорения; КнС; КнП – кнопки «Стоп» и
- 95. К недостатку этого метода пуска двигателя можно отнести то, что двигатель может остаться на реостатной позиции,
- 96. Каждый контактор КУ настроен на срабатывание при различных напряжениях Uку1 Недостатком этой схемы является то, что
- 97. 6.3. Управление в функции тока Схема автоматического пуска в функции тока должна предусматривать токовые реле, включенные
- 98. РУ – реле токовое, реле ускорения; КУ – контактор ускорения; РБ – реле блокировочное, tРБ >
- 99. Достоинство данного принципа управления заключается в том, что все переключения производятся при заданных токах в цепи
- 100. 6.4. Управление в функции времени Для автоматизации пуска используются различные реле времени: механические, электромагнитные, электронные, пневматические
- 102. Исходная позиция: получает питание только катушка РУ1 через контакт Кл. Катушки КУ1 и КУ2 питание не
- 103. По истечении времени t2, времени срабатывания РУ2: замыкается контакт РУ2, катушка КУ2 получает питание, шунтируется резистор
- 105. Скачать презентацию
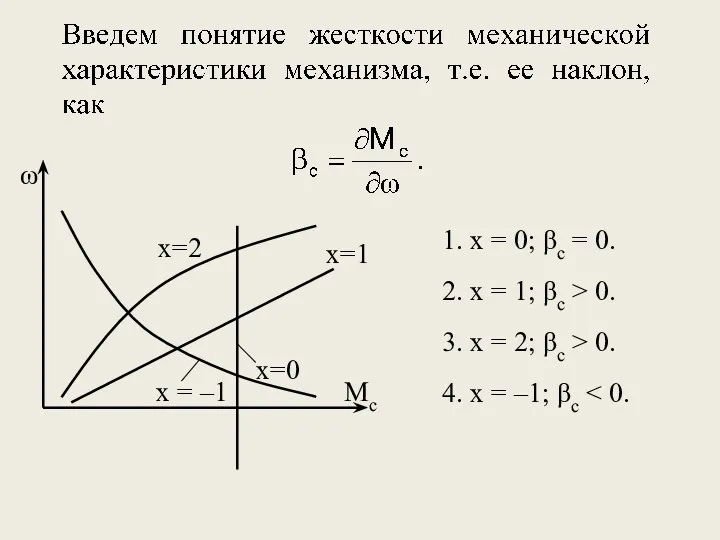
ω
Мс
х=0
х=1
х=2
х = –1
1. х = 0; βс = 0.
2. х =
ω
Мс
х=0
х=1
х=2
х = –1
1. х = 0; βс = 0.
2. х =
ω
1
М
2
3
4
1. β = ∞ – абсолютно жесткая.
2. β < 0 – жесткая.
3.
ω
1
М
2
3
4
1. β = ∞ – абсолютно жесткая.
2. β < 0 – жесткая.
3.
Механические характеристики электродвигателей
Двигательный режим (U > E).
Механические характеристики ДПТ независимого возбуждения
U
Механические характеристики электродвигателей
Двигательный режим (U > E).
Механические характеристики ДПТ независимого возбуждения
U

Механическая характеристика ω = f(M).
Механическая характеристика ω = f(M).
Построение механической характеристики
Механическую характеристику можно построить по паспортным данным: Iн; ωн;
Построение механической характеристики
Механическую характеристику можно построить по паспортным данным: Iн; ωн;
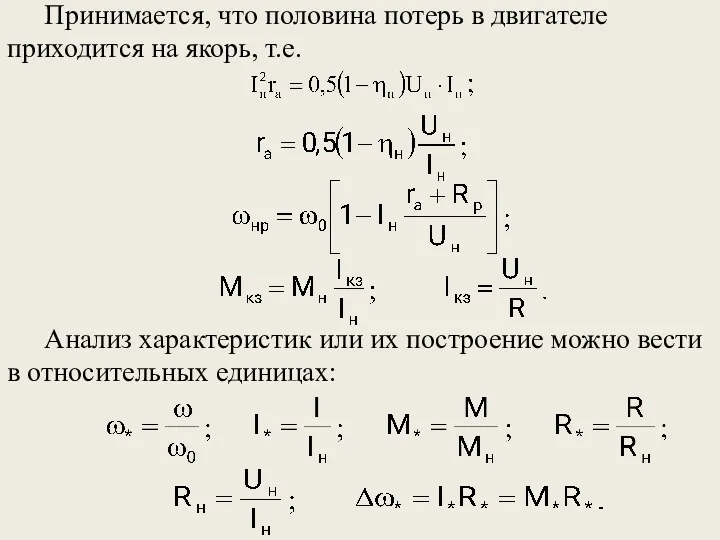
Принимается, что половина потерь в двигателе приходится на якорь, т.е.
Анализ характеристик
Принимается, что половина потерь в двигателе приходится на якорь, т.е.
Анализ характеристик
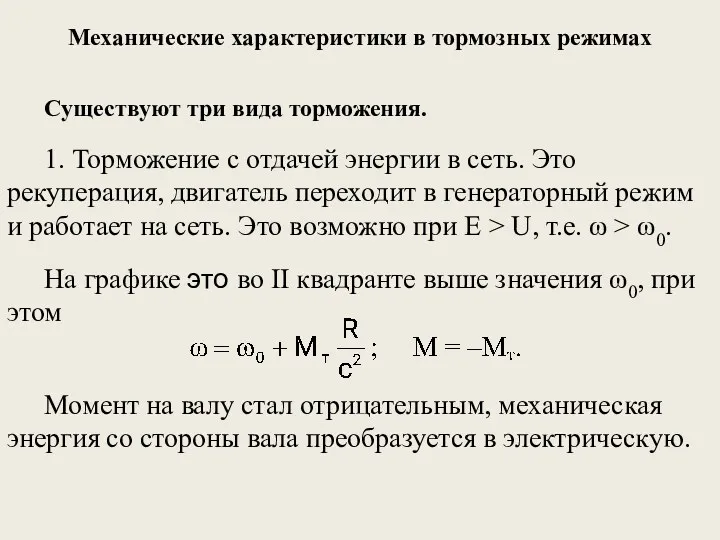
Механические характеристики в тормозных режимах
Существуют три вида торможения.
1. Торможение с отдачей
Механические характеристики в тормозных режимах
Существуют три вида торможения.
1. Торможение с отдачей

2. Динамическое торможение – двигатель отключается от сети и подключается к
2. Динамическое торможение – двигатель отключается от сети и подключается к
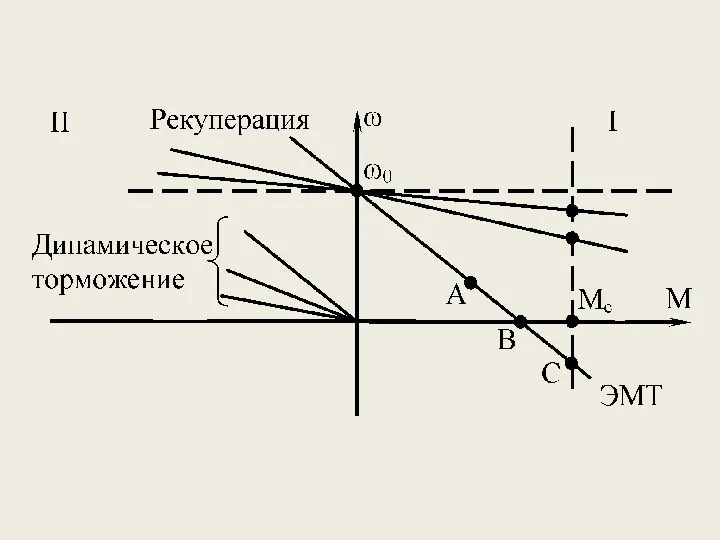
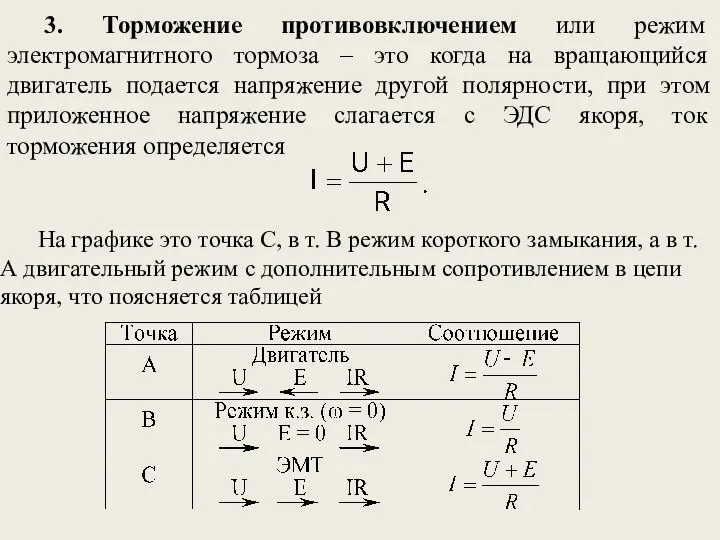
3. Торможение противовключением или режим электромагнитного тормоза – это когда на
3. Торможение противовключением или режим электромагнитного тормоза – это когда на
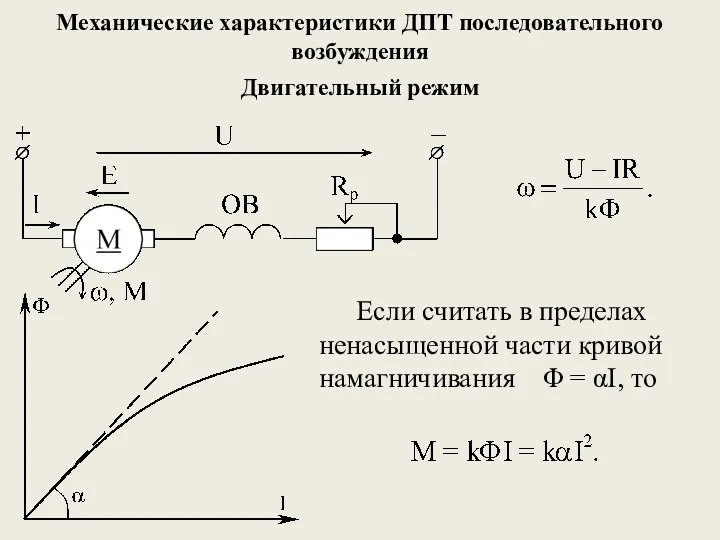
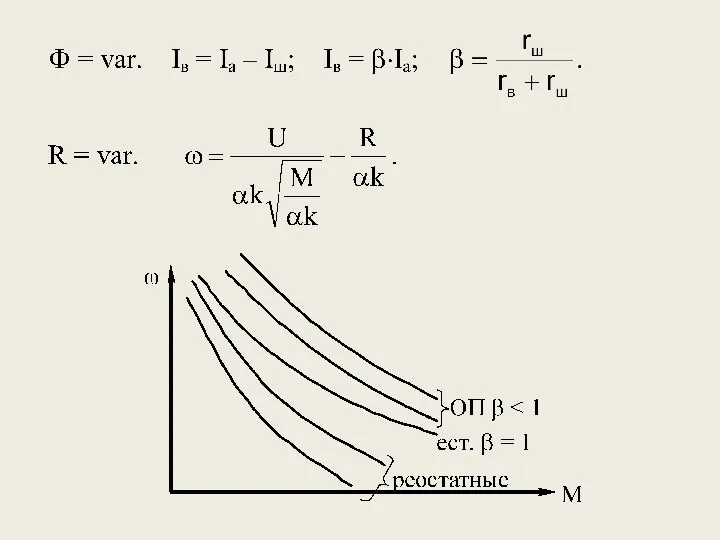
Механические характеристики ДПТ последовательного возбуждения
Двигательный режим
Если считать в пределах
ненасыщенной части
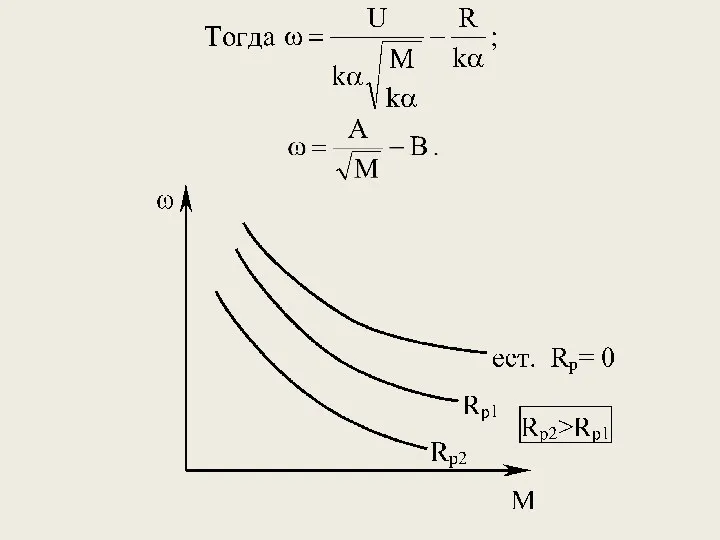
Механические характеристики ДПТ последовательного возбуждения
Двигательный режим
Если считать в пределах ненасыщенной части
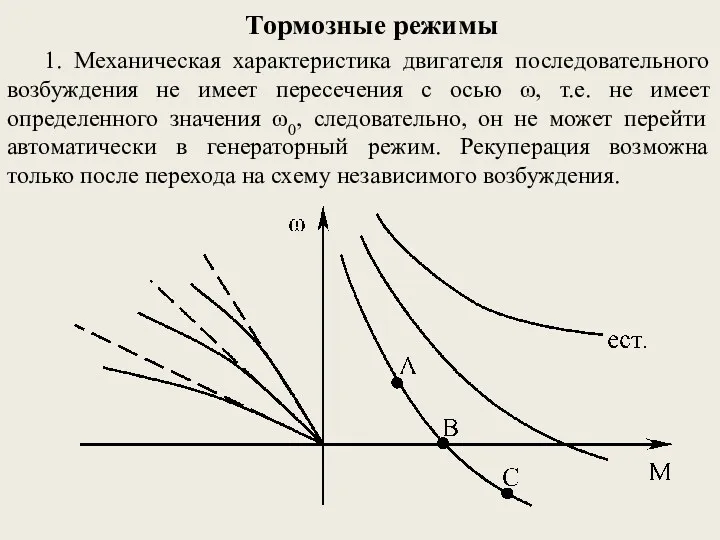
Тормозные режимы
1. Механическая характеристика двигателя последовательного возбуждения не имеет пересечения с
Тормозные режимы
1. Механическая характеристика двигателя последовательного возбуждения не имеет пересечения с
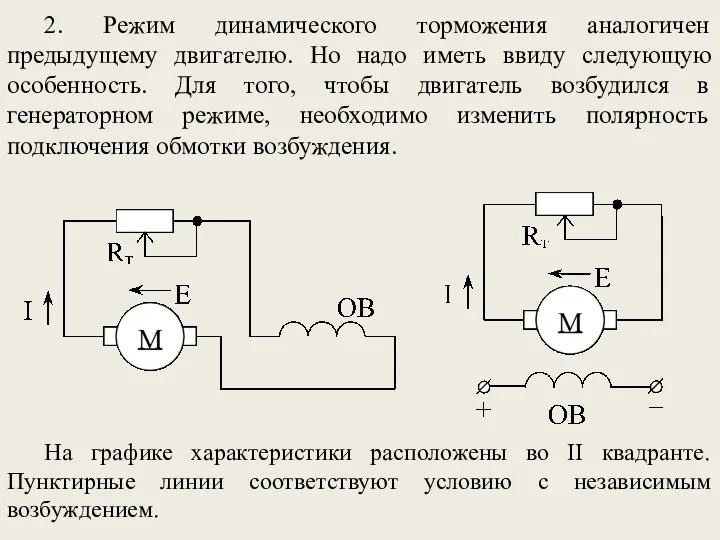
2. Режим динамического торможения аналогичен предыдущему двигателю. Но надо иметь ввиду
2. Режим динамического торможения аналогичен предыдущему двигателю. Но надо иметь ввиду
3. Режим противовключения возможен в двух случаях:
– внешний момент больше момента
3. Режим противовключения возможен в двух случаях:
– внешний момент больше момента
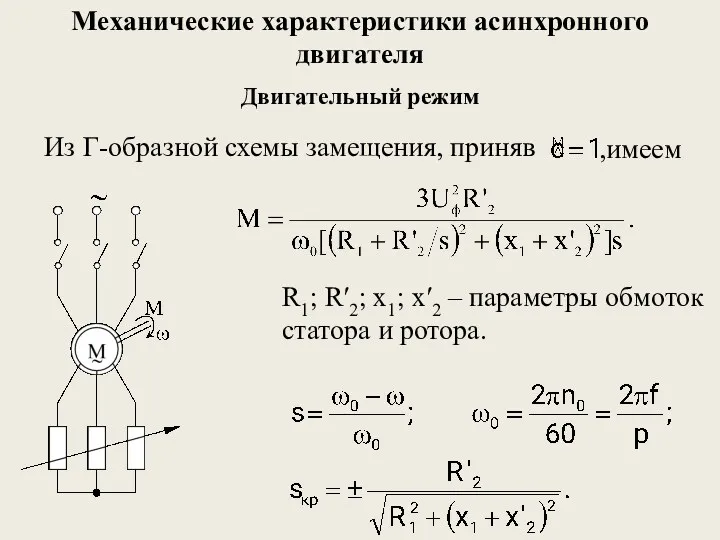
Механические характеристики асинхронного двигателя
Двигательный режим
Из Г-образной схемы замещения, приняв
,имеем
R1;
Механические характеристики асинхронного двигателя
Двигательный режим
Из Г-образной схемы замещения, приняв
,имеем
R1;
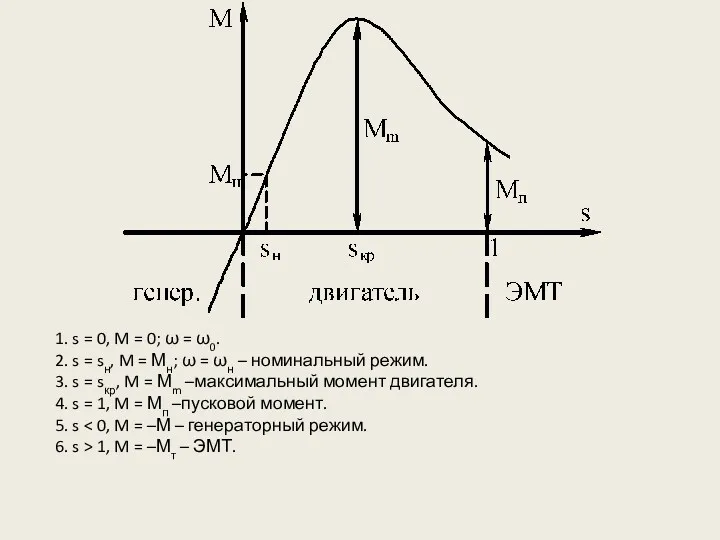
1. s = 0, M = 0; ω = ω0.
2. s
1. s = 0, M = 0; ω = ω0.
2. s
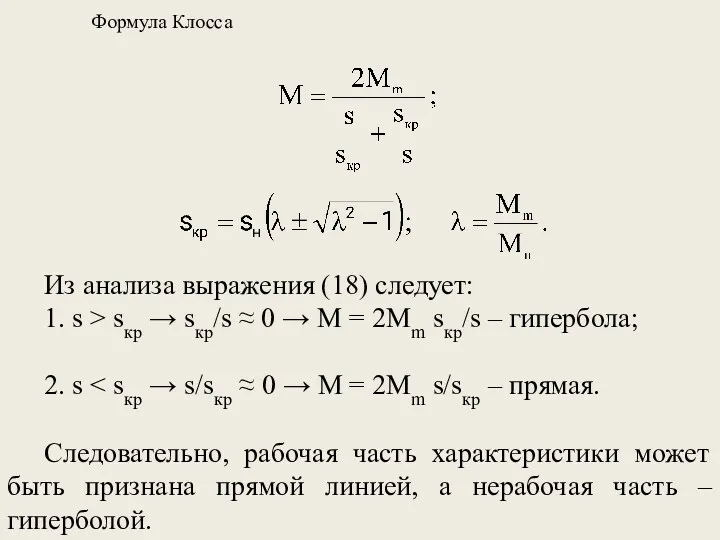
Формула Клосса
Из анализа выражения (18) следует:
1. s > sкр →
Формула Клосса
Из анализа выражения (18) следует:
1. s > sкр →
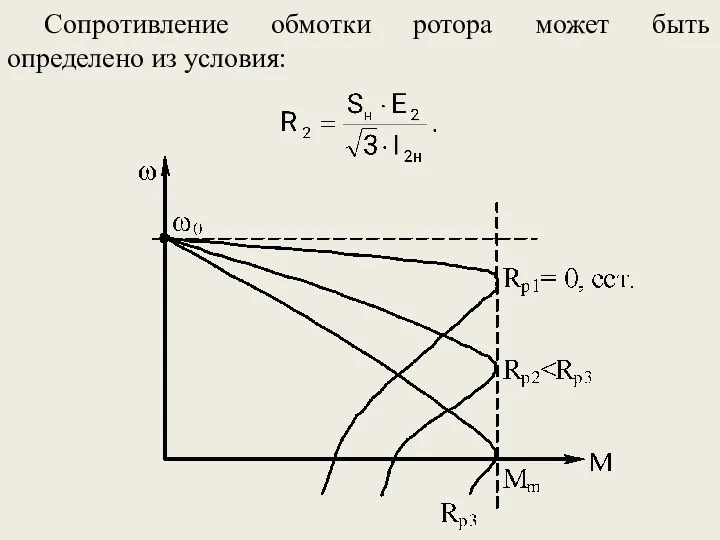
Сопротивление обмотки ротора может быть определено из условия:
Сопротивление обмотки ротора может быть определено из условия:
Тормозные режимы
Асинхронный двигатель обладает режимами торможения:
1. АД может автоматически перейти в
Тормозные режимы
Асинхронный двигатель обладает режимами торможения:
1. АД может автоматически перейти в
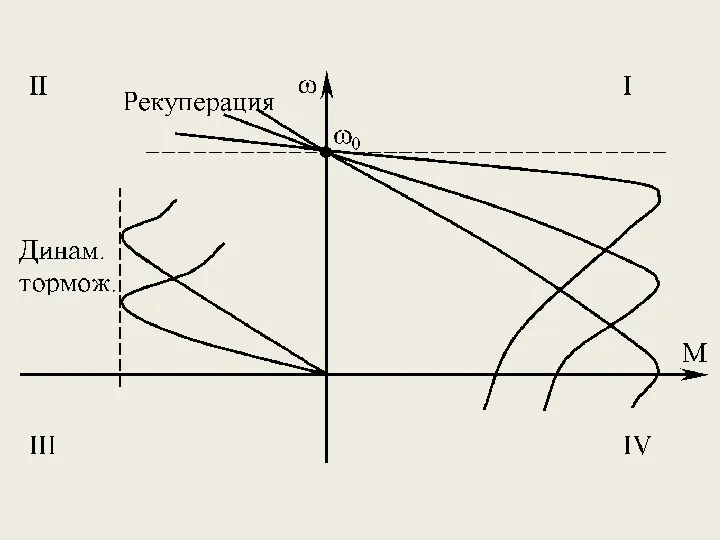
2. Динамическое торможение – двигатель отключается от сети, а на обмотку
2. Динамическое торможение – двигатель отключается от сети, а на обмотку
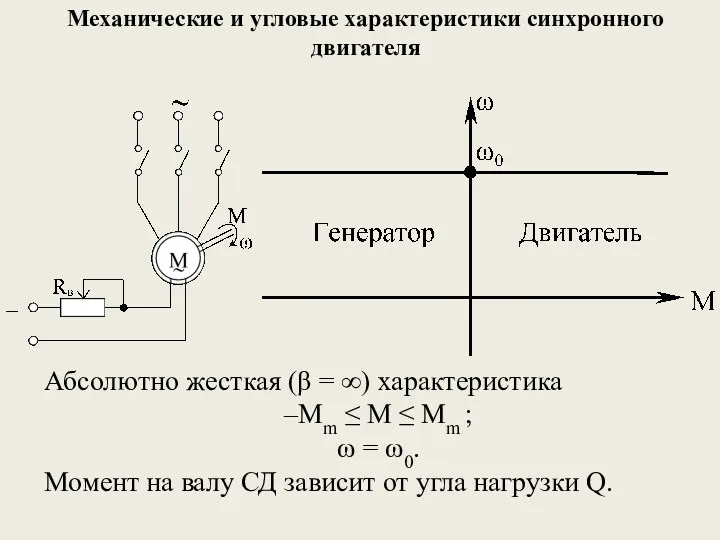
Механические и угловые характеристики синхронного двигателя
Абсолютно жесткая (β = ∞) характеристика
–Мm
Механические и угловые характеристики синхронного двигателя
Абсолютно жесткая (β = ∞) характеристика
–Мm

Для неявнополюсной машины имеем:
0 ≤ Q ≤ 900 – рабочая часть
Для неявнополюсной машины имеем:
0 ≤ Q ≤ 900 – рабочая часть

Режимы торможения:
1. Рекуперация возможна, но она не дает снижения скорости.
3. Противовключение
Режимы торможения:
1. Рекуперация возможна, но она не дает снижения скорости.
3. Противовключение
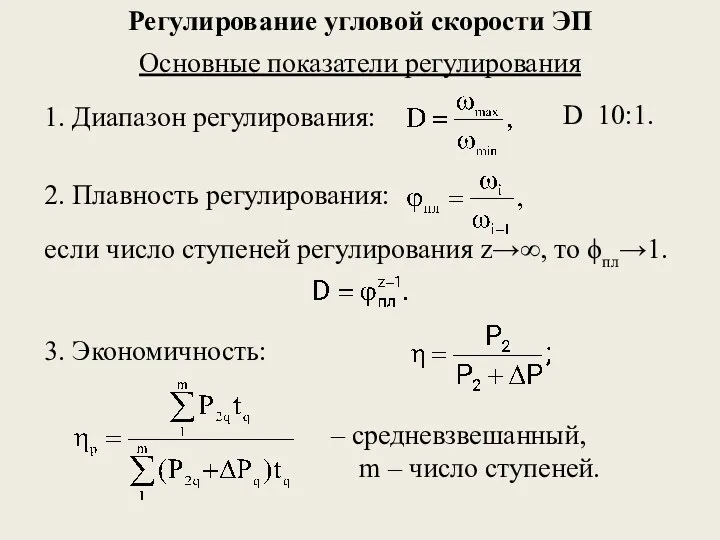
Регулирование угловой скорости ЭП
Основные показатели регулирования
1. Диапазон регулирования:
2. Плавность регулирования:
если число
Регулирование угловой скорости ЭП
Основные показатели регулирования
1. Диапазон регулирования:
2. Плавность регулирования:
если число
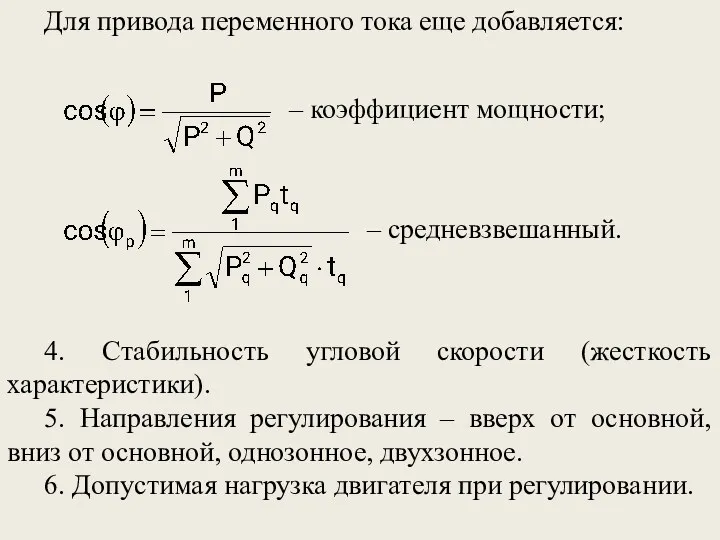
Для привода переменного тока еще добавляется:
– коэффициент мощности;
– средневзвешанный.
4. Стабильность угловой
Для привода переменного тока еще добавляется:
– коэффициент мощности;
– средневзвешанный.
4. Стабильность угловой
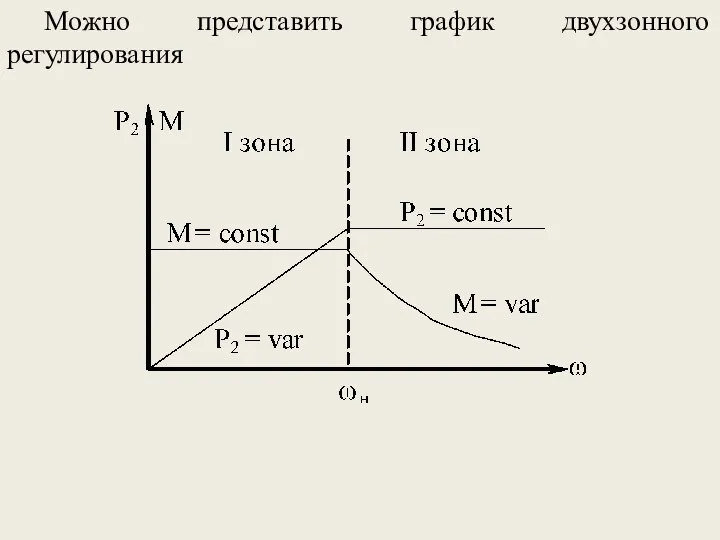
Можно представить график двухзонного регулирования
Можно представить график двухзонного регулирования
Регулирование угловой скорости ДПТ независимого возбуждения
Все способы регулирования вытекают из известного
Регулирование угловой скорости ДПТ независимого возбуждения
Все способы регулирования вытекают из известного
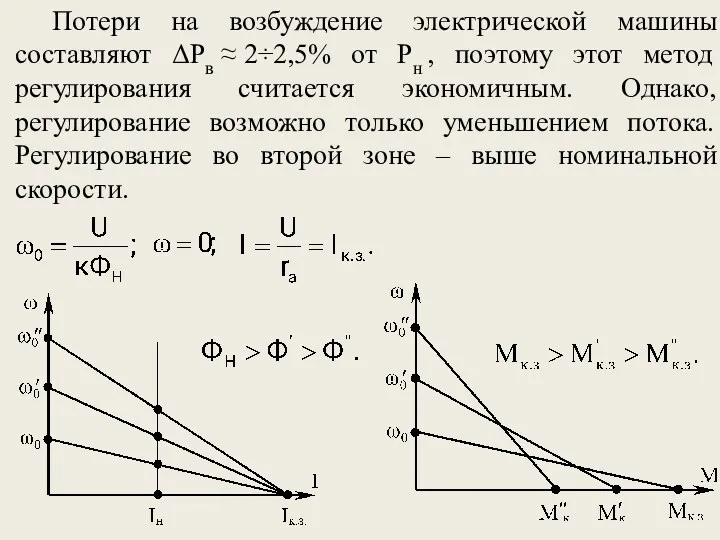
Потери на возбуждение электрической машины составляют ΔPв ≈ 2÷2,5% от Рн , поэтому этот
Потери на возбуждение электрической машины составляют ΔPв ≈ 2÷2,5% от Рн , поэтому этот
Импульсное регулирование напряжения (U = var)
К – электронный ключ.
ШИР – широтно-импульсное
Импульсное регулирование напряжения (U = var)
К – электронный ключ. ШИР – широтно-импульсное
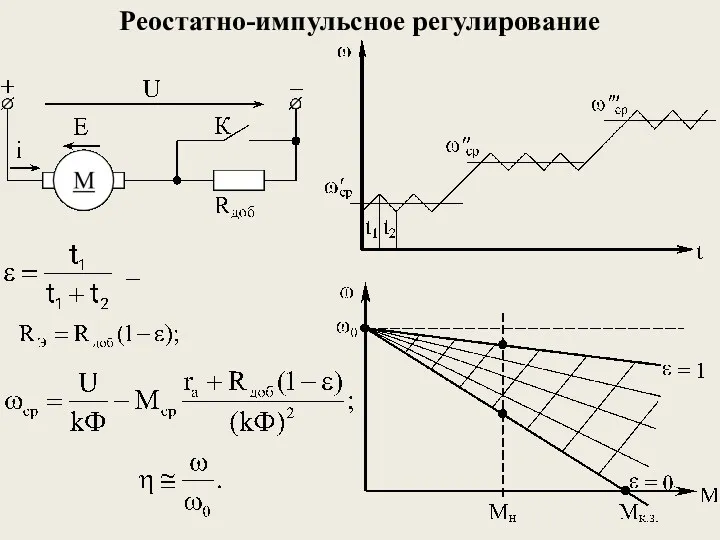
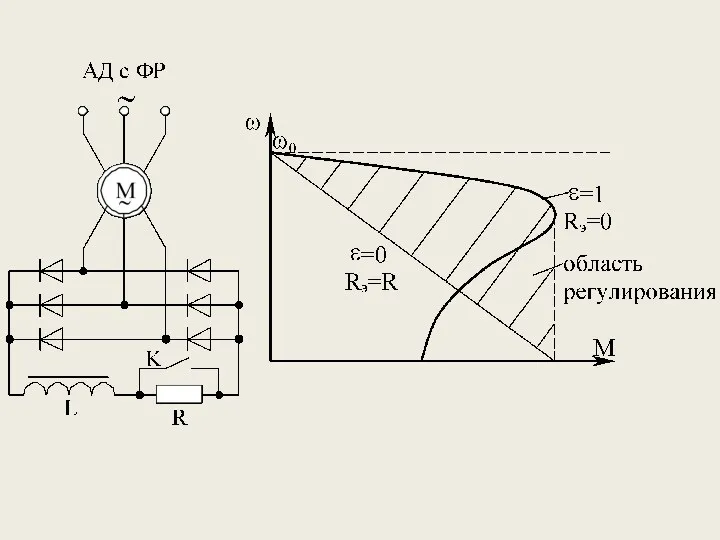
Реостатно-импульсное регулирование
Реостатно-импульсное регулирование
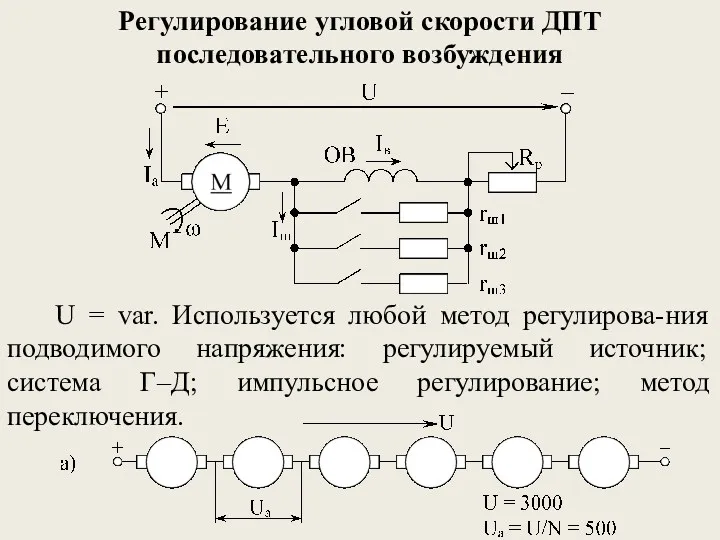
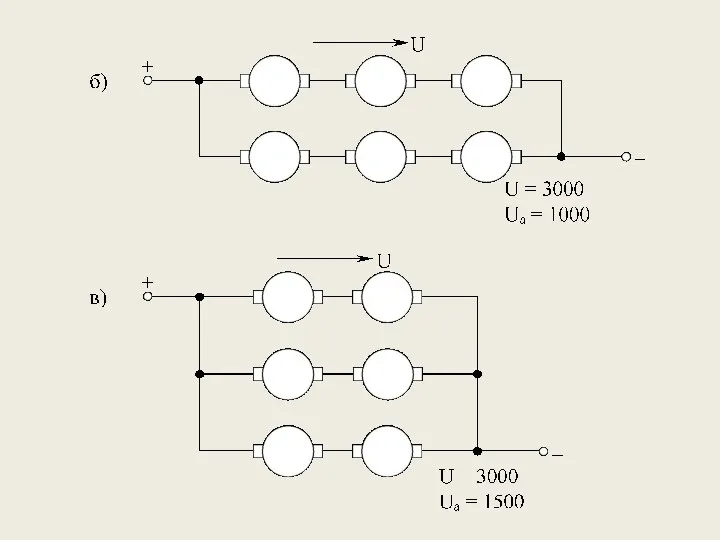
Регулирование угловой скорости ДПТ последовательного возбуждения
U = var. Используется любой
Регулирование угловой скорости ДПТ последовательного возбуждения
U = var. Используется любой
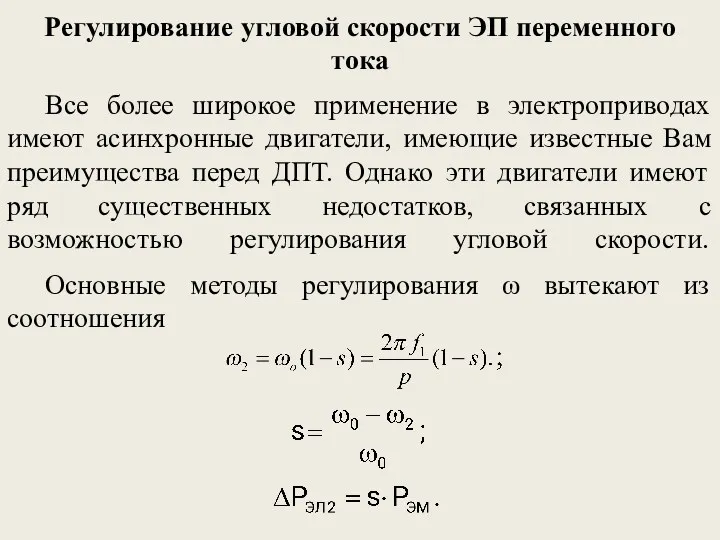
Регулирование угловой скорости ЭП переменного тока
Все более широкое применение в электроприводах
Регулирование угловой скорости ЭП переменного тока
Все более широкое применение в электроприводах
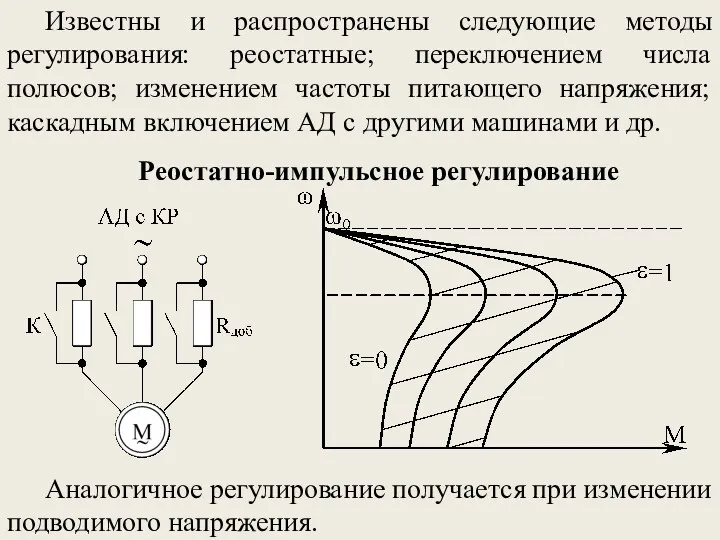
Известны и распространены следующие методы регулирования: реостатные; переключением числа полюсов; изменением
Известны и распространены следующие методы регулирования: реостатные; переключением числа полюсов; изменением
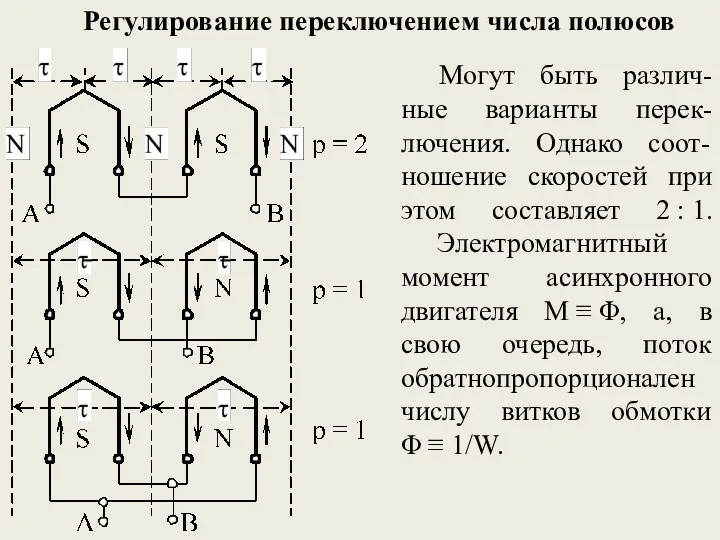
Регулирование переключением числа полюсов
Могут быть различ-ные варианты перек-лючения. Однако соот-ношение скоростей
Регулирование переключением числа полюсов
Могут быть различ-ные варианты перек-лючения. Однако соот-ношение скоростей
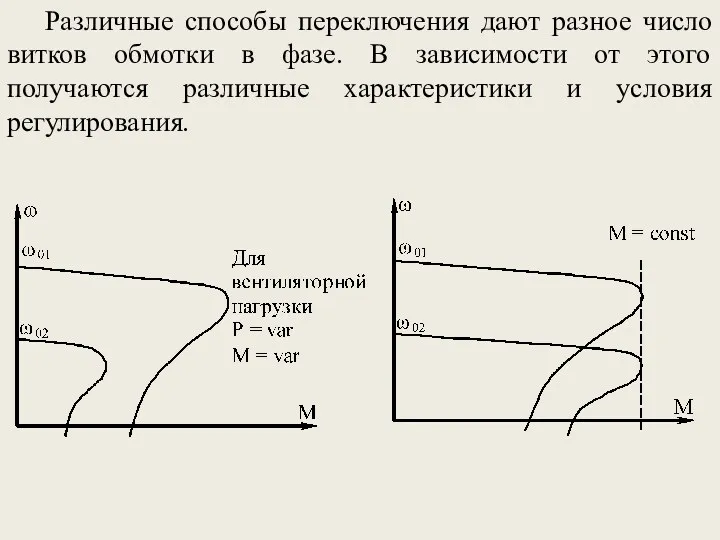
Различные способы переключения дают разное число витков обмотки в фазе. В
Различные способы переключения дают разное число витков обмотки в фазе. В
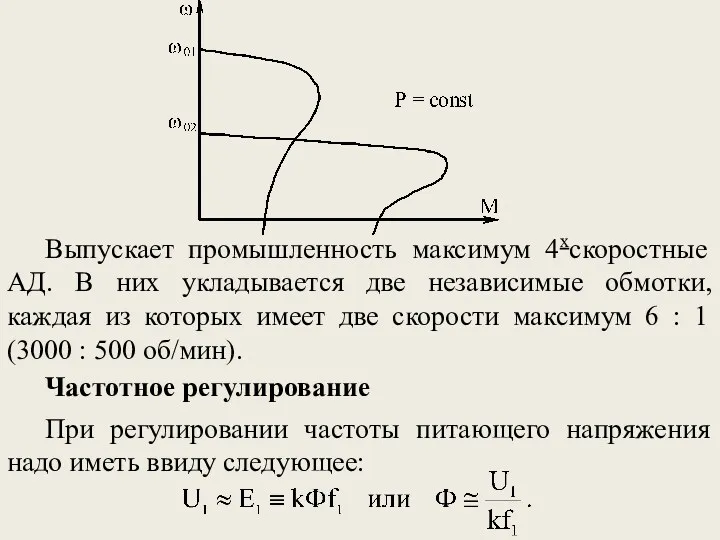
Выпускает промышленность максимум 4хскоростные АД. В них укладывается две независимые обмотки,
Выпускает промышленность максимум 4хскоростные АД. В них укладывается две независимые обмотки,
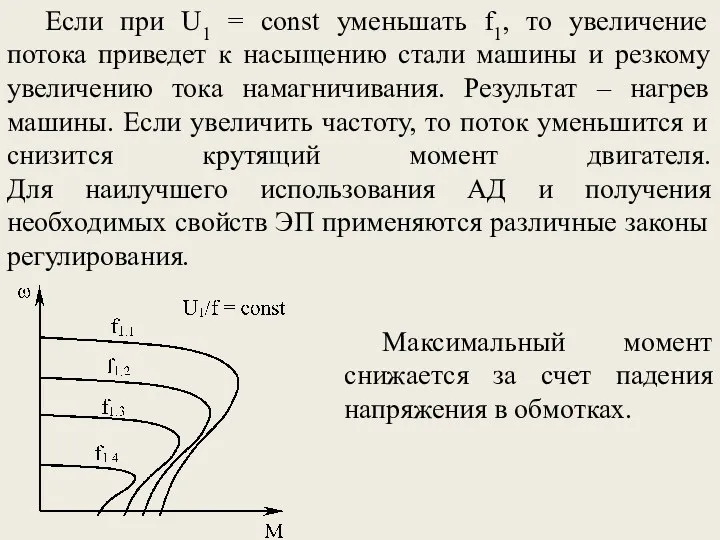
Если при U1 = const уменьшать f1, то увеличение потока приведет
Если при U1 = const уменьшать f1, то увеличение потока приведет
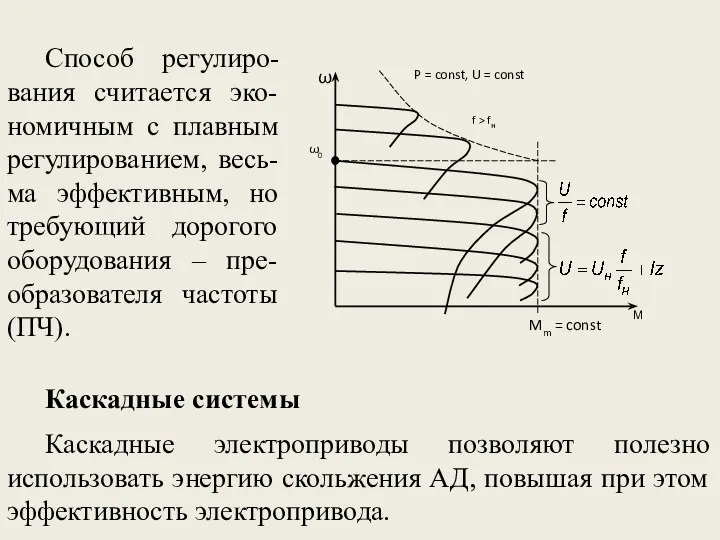
Способ регулиро-вания считается эко-номичным с плавным регулированием, весь-ма эффективным, но требующий
Способ регулиро-вания считается эко-номичным с плавным регулированием, весь-ма эффективным, но требующий
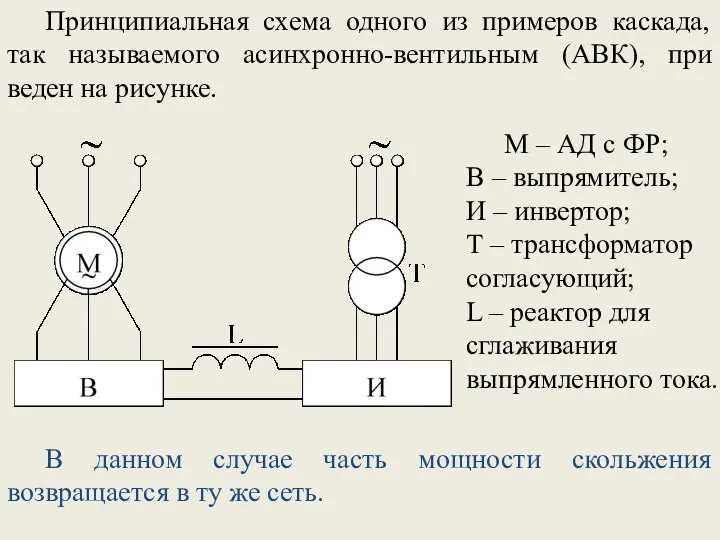
В данном случае часть мощности скольжения возвращается в ту же сеть.
Принципиальная
В данном случае часть мощности скольжения возвращается в ту же сеть.
Принципиальная
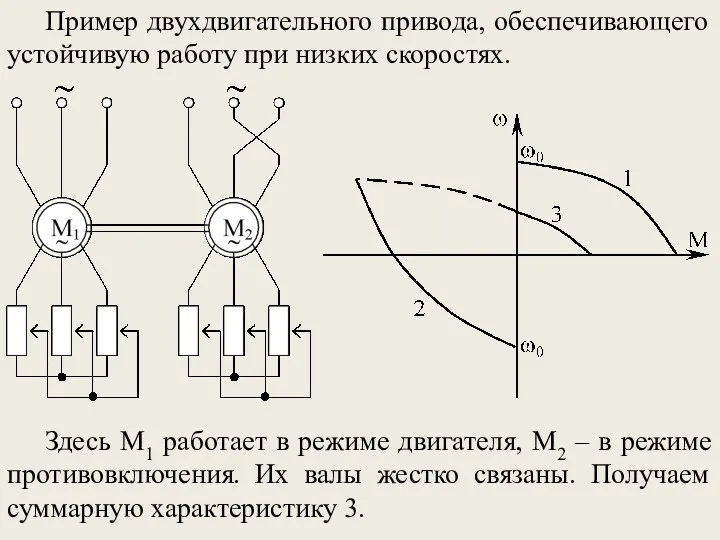
Здесь M1 работает в режиме двигателя, M2 – в режиме противовключения.
Здесь M1 работает в режиме двигателя, M2 – в режиме противовключения.
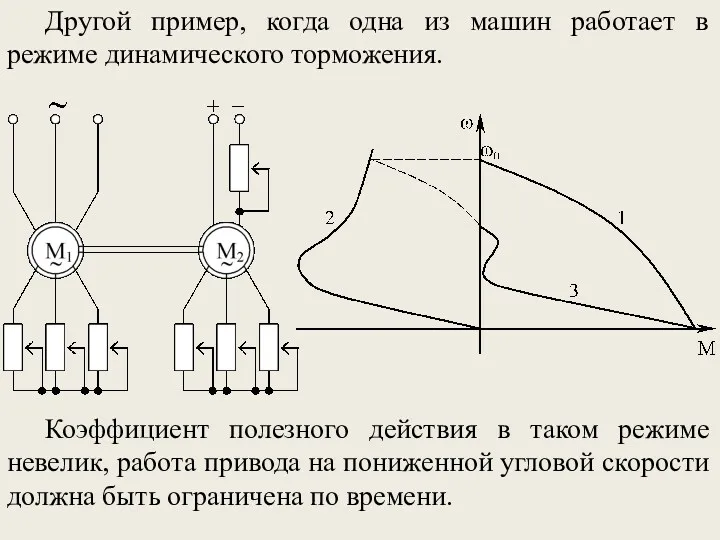
Другой пример, когда одна из машин работает в режиме динамического торможения.
Коэффициент
Другой пример, когда одна из машин работает в режиме динамического торможения.
Коэффициент
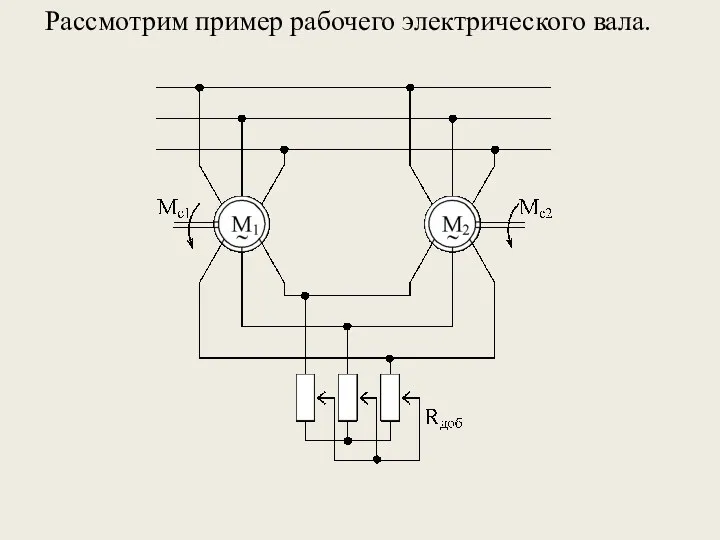
Рассмотрим пример рабочего электрического вала.
Рассмотрим пример рабочего электрического вала.
Статоры M1 и M2 включены на одну сеть, фазные роторы включены
Статоры M1 и M2 включены на одну сеть, фазные роторы включены
Переходные режимы в ЭП
Общие положения
Переходным или динамическим режимом ЭП называется режим
Переходные режимы в ЭП
Общие положения
Переходным или динамическим режимом ЭП называется режим
Учитывая, что тепловые процессы обладают значительной инерцией, то считают их не
Учитывая, что тепловые процессы обладают значительной инерцией, то считают их не
Пуск ДПТ независимого возбуждения
Допустим: Ф = const; U = const;
Пуск ДПТ независимого возбуждения
Допустим: Ф = const; U = const;
или
где
электромеханическая постоянная времени привода.
В общем виде решение следующее
где С –
или
где
электромеханическая постоянная времени привода.
В общем виде решение следующее
где С –
Характер изменения скорости подчиняется закону экспоненты. Теоретически переходный процесс длится бесконечно.
Характер изменения скорости подчиняется закону экспоненты. Теоретически переходный процесс длится бесконечно.
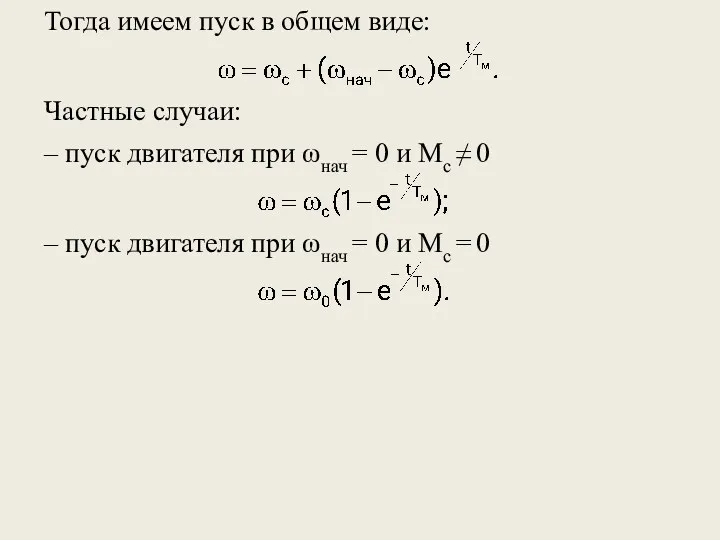
Тогда имеем пуск в общем виде:
Частные случаи:
– пуск двигателя при ωнач
Тогда имеем пуск в общем виде:
Частные случаи:
– пуск двигателя при ωнач
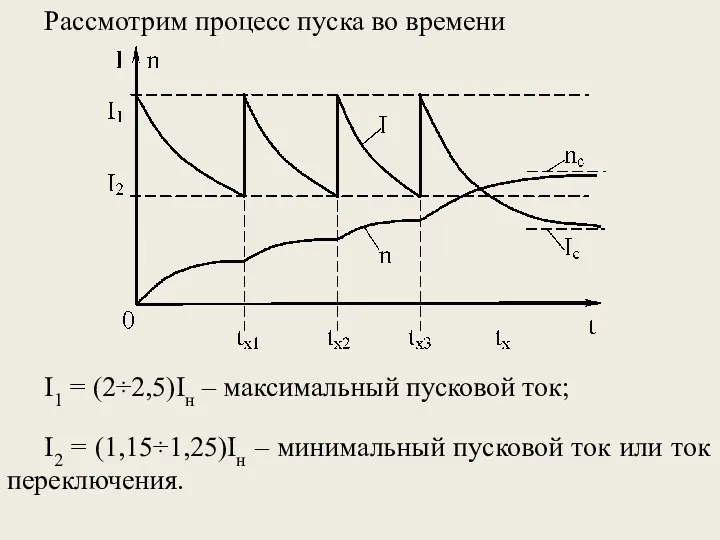
Рассмотрим процесс пуска во времени
I1 = (2÷2,5)Iн – максимальный пусковой ток;
I2
Рассмотрим процесс пуска во времени
I1 = (2÷2,5)Iн – максимальный пусковой ток;
I2
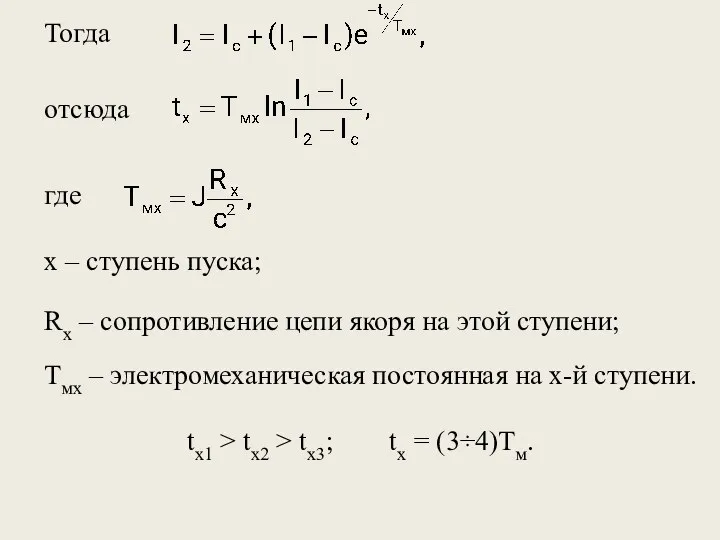
Тогда
отсюда
где
х – ступень пуска;
tx1 > tx2 > tx3; tx = (3÷4)Tм.
Тогда
отсюда
где
х – ступень пуска;
tx1 > tx2 > tx3; tx = (3÷4)Tм.
Расчет мощности ЭП
Общие положения
Правильный выбор двигателя по мощности очень важен. Применение
Расчет мощности ЭП
Общие положения
Правильный выбор двигателя по мощности очень важен. Применение
Для выбора мощности двигателя важно иметь графическое изображение зависимости момента сопротивления
Для выбора мощности двигателя важно иметь графическое изображение зависимости момента сопротивления
Потери энергии в ЭП
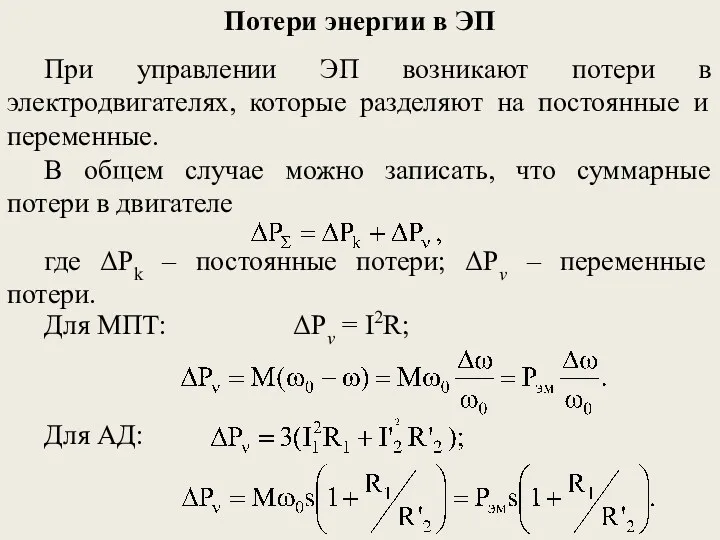
При управлении ЭП возникают потери в электродвигателях, которые
Потери энергии в ЭП
При управлении ЭП возникают потери в электродвигателях, которые
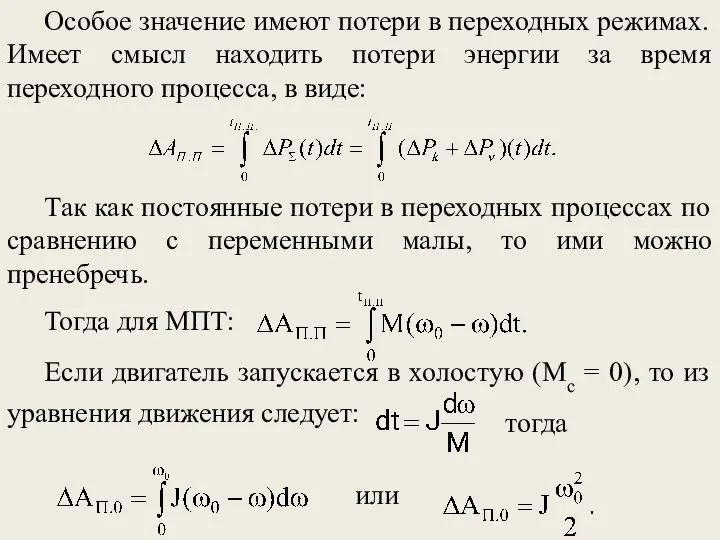
Особое значение имеют потери в переходных режимах. Имеет смысл находить потери
Особое значение имеют потери в переходных режимах. Имеет смысл находить потери
Пуск двигателя в холостую связан с потерями в нем, равными запасенной
Пуск двигателя в холостую связан с потерями в нем, равными запасенной
– потери, выз-ванные наличием момента нагрузки.
Проводя аналогичный анализ различных переходных процессов
– потери, выз-ванные наличием момента нагрузки.
Проводя аналогичный анализ различных переходных процессов
Общие рекомендации по снижению потерь:
где m – число ступеней регулирования.
При m
Общие рекомендации по снижению потерь:
где m – число ступеней регулирования.
При m
5.3. Классы изоляции
Потери энергии в электродвигателе вызывают нагрев его отдельных элементов.
5.3. Классы изоляции
Потери энергии в электродвигателе вызывают нагрев его отдельных элементов.
изоляция класса A νд≤105°С;
изоляция класса E νд≤120°С;
изоляция класса B νд≤130°С;
изоляция
изоляция класса A νд≤105°С;
изоляция класса E νд≤120°С;
изоляция класса B νд≤130°С;
изоляция
Превышение допустимых ограничений ведет к разрушению изоляции обмоток и резкому сокращению
Превышение допустимых ограничений ведет к разрушению изоляции обмоток и резкому сокращению
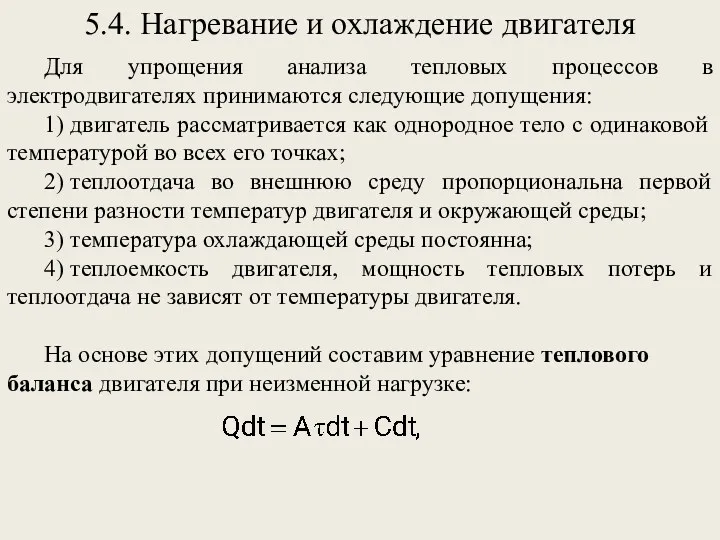
5.4. Нагревание и охлаждение двигателя
Для упрощения анализа тепловых процессов в электродвигателях
5.4. Нагревание и охлаждение двигателя
Для упрощения анализа тепловых процессов в электродвигателях
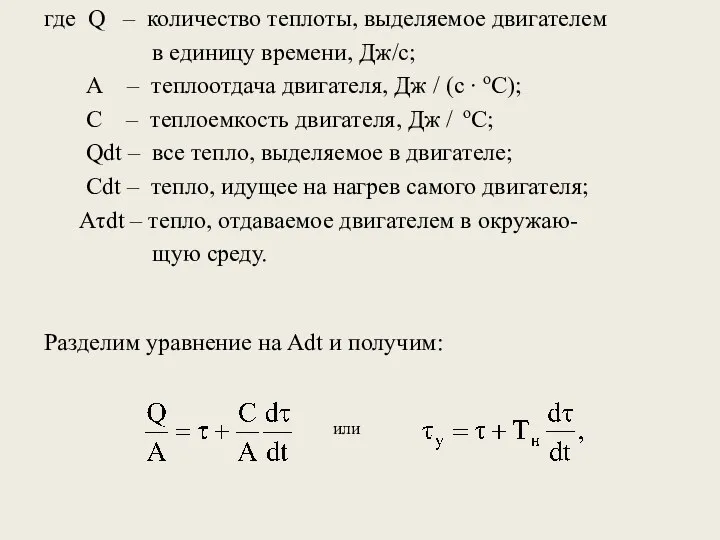
где Q – количество теплоты, выделяемое двигателем
в единицу времени,
где Q – количество теплоты, выделяемое двигателем
в единицу времени,
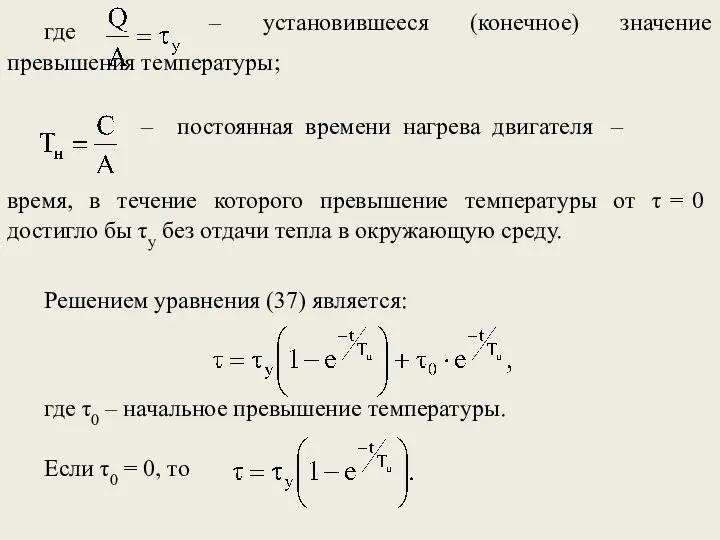
– постоянная времени нагрева двигателя –
время, в течение которого превышение температуры
– постоянная времени нагрева двигателя –
время, в течение которого превышение температуры
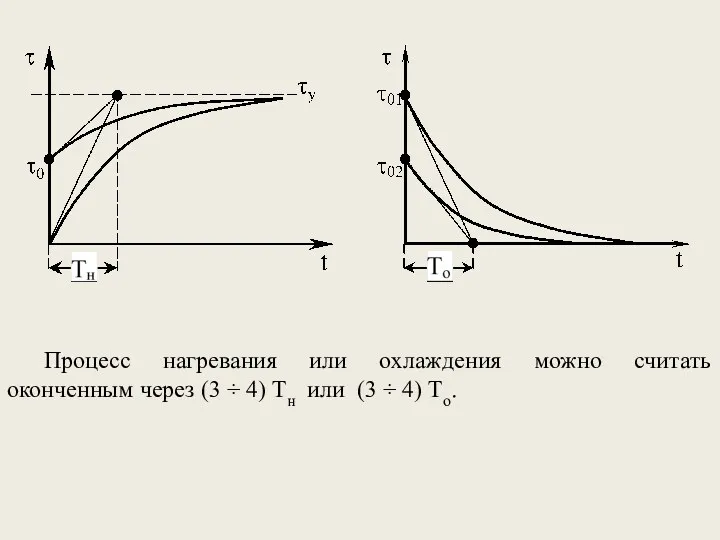
Процесс нагревания или охлаждения можно считать оконченным через (3 ÷ 4) Тн или
Процесс нагревания или охлаждения можно считать оконченным через (3 ÷ 4) Тн или
5.5. Режимы работы ЭП
Различные условия работы производственных механизмов обусловливают различные режимы
5.5. Режимы работы ЭП
Различные условия работы производственных механизмов обусловливают различные режимы
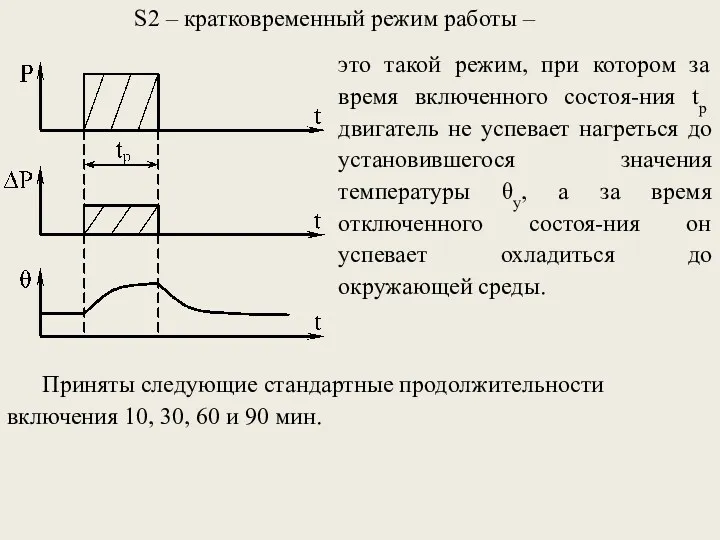
это такой режим, при котором за время включенного состоя-ния tp двигатель
это такой режим, при котором за время включенного состоя-ния tp двигатель
это такой режим работы, когда за время включенного состоя-ния tp двигатель
это такой режим работы, когда за время включенного состоя-ния tp двигатель
5.6. Расчет мощности двигателя
при продолжительном режиме работы (S1).
Для правильного
5.6. Расчет мощности двигателя
при продолжительном режиме работы (S1).
Для правильного
б) при переменной нагрузке.
В этих случаях пользуются, чаще всего, методом средних
б) при переменной нагрузке.
В этих случаях пользуются, чаще всего, методом средних
Сущность метода заключается в том, что если найденные средние потери ΔРср
Сущность метода заключается в том, что если найденные средние потери ΔРср
5.7. Расчет мощности двигателя при кратковременном режиме работы
Для кратковременного режима
5.7. Расчет мощности двигателя при кратковременном режиме работы
Для кратковременного режима
Если Рном = Ркр, то двигатель окажется недоиспользован. Кривая 1. Правильно
Если Рном = Ркр, то двигатель окажется недоиспользован. Кривая 1. Правильно
5.8. Расчет мощности двигателя при
повторно-кратковременном режиме работы
Двигатель выбирается по фактическому
5.8. Расчет мощности двигателя при
повторно-кратковременном режиме работы
Двигатель выбирается по фактическому
6. Системы автоматического управления ЭП
6.1. Общие сведения
Управление ЭП заключается в осуществлении
6. Системы автоматического управления ЭП
6.1. Общие сведения
Управление ЭП заключается в осуществлении

В системе управления ЭП используются: релейно-контактные аппараты; усилители; преобразовательные устройства и
В системе управления ЭП используются: релейно-контактные аппараты; усилители; преобразовательные устройства и
Для обеспечения чтения схем и для их проектирования имеется система условных
Для обеспечения чтения схем и для их проектирования имеется система условных
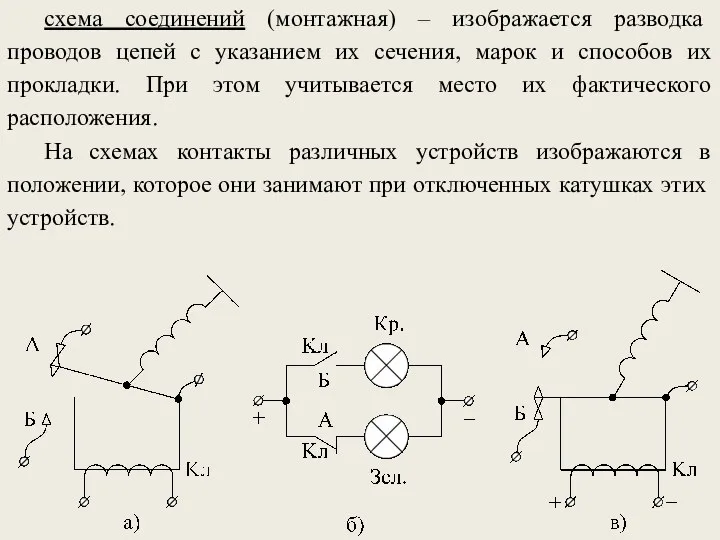
схема соединений (монтажная) – изображается разводка проводов цепей с указанием их
схема соединений (монтажная) – изображается разводка проводов цепей с указанием их
Контактор линейный Кл имеет два типа контактов: один замыкающий, другой размыкающий.
Контактор линейный Кл имеет два типа контактов: один замыкающий, другой размыкающий.
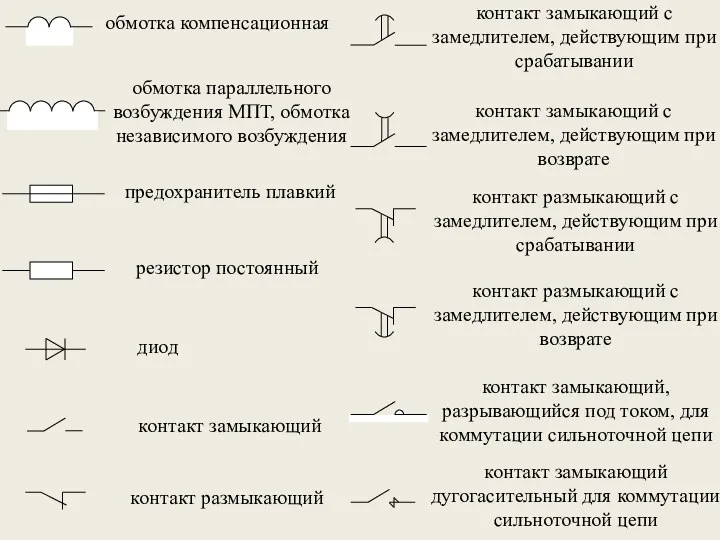
обмотка компенсационная
обмотка параллельного возбуждения МПТ, обмотка независимого возбуждения
резистор постоянный
обмотка компенсационная
обмотка параллельного возбуждения МПТ, обмотка независимого возбуждения
резистор постоянный
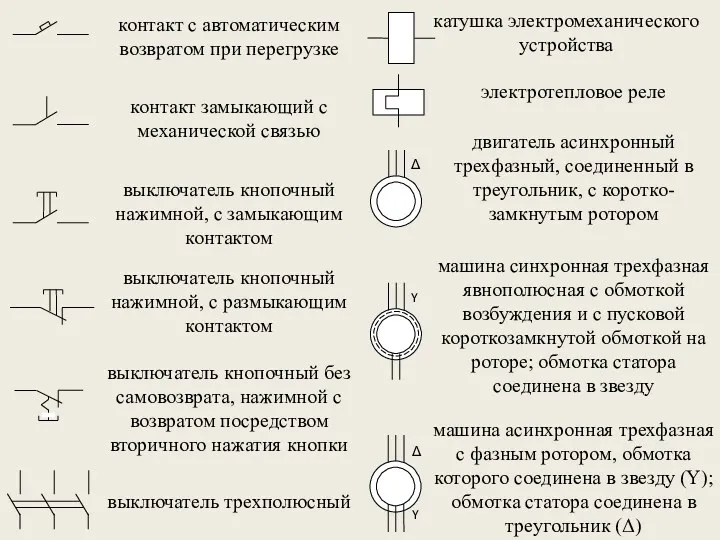
контакт с автоматическим возвратом при перегрузке
контакт замыкающий с механической связью
выключатель кнопочный
контакт с автоматическим возвратом при перегрузке
контакт замыкающий с механической связью
выключатель кнопочный
6.2. Управление в функции
угловой скорости (ЭДС)
Управление в функции угловой скорости требует
6.2. Управление в функции
угловой скорости (ЭДС)
Управление в функции угловой скорости требует
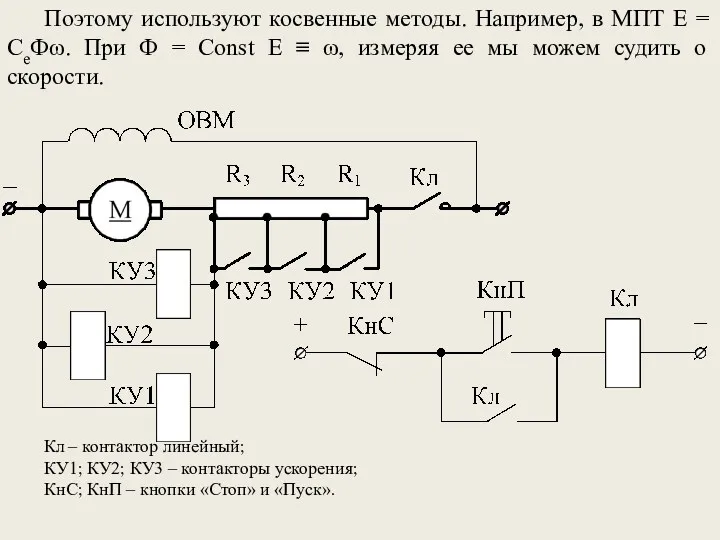
Кл – контактор линейный;
КУ1; КУ2; КУ3 – контакторы ускорения;
КнС; КнП –
Кл – контактор линейный;
КУ1; КУ2; КУ3 – контакторы ускорения;
КнС; КнП –
К недостатку этого метода пуска двигателя можно отнести то, что двигатель
К недостатку этого метода пуска двигателя можно отнести то, что двигатель
Каждый контактор КУ настроен на срабатывание при различных напряжениях Uку1 <
Каждый контактор КУ настроен на срабатывание при различных напряжениях Uку1 <
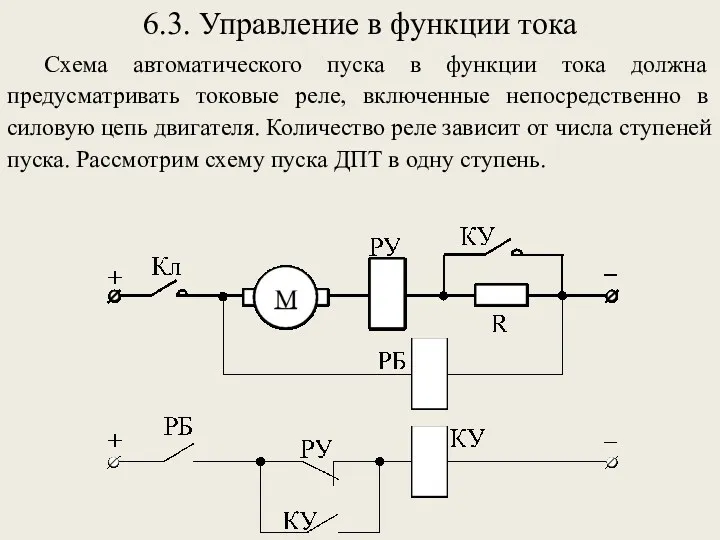
6.3. Управление в функции тока
Схема автоматического пуска в функции тока должна
6.3. Управление в функции тока
Схема автоматического пуска в функции тока должна
РУ – реле токовое, реле ускорения;
КУ – контактор ускорения;
РБ – реле
РУ – реле токовое, реле ускорения;
КУ – контактор ускорения;
РБ – реле
Достоинство данного принципа управления заключается в том, что все переключения производятся
Достоинство данного принципа управления заключается в том, что все переключения производятся
6.4. Управление в функции времени
Для автоматизации пуска используются различные реле времени:
6.4. Управление в функции времени
Для автоматизации пуска используются различные реле времени:
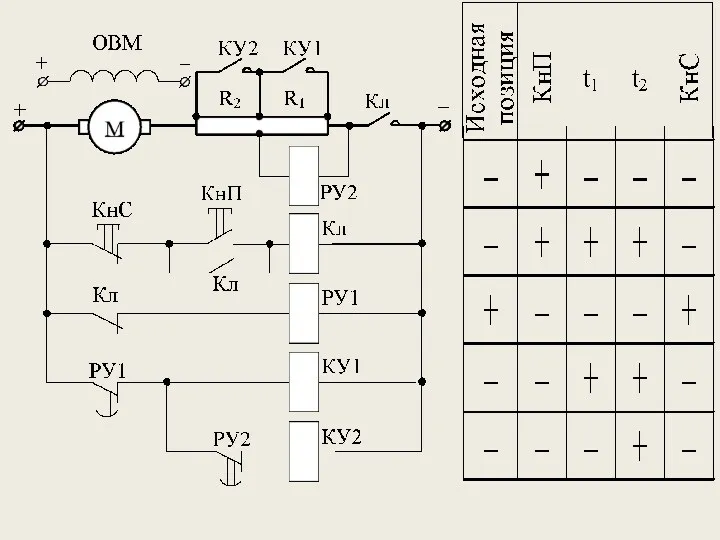
Исходная позиция: получает питание только катушка РУ1 через контакт Кл. Катушки
Исходная позиция: получает питание только катушка РУ1 через контакт Кл. Катушки
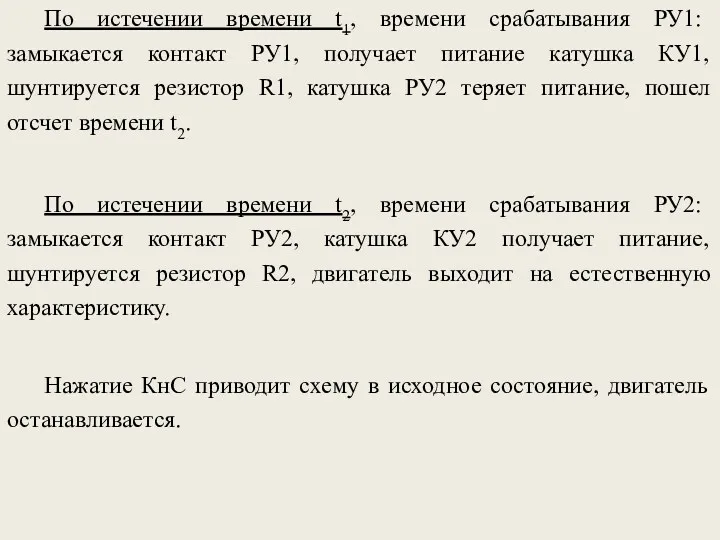
По истечении времени t2, времени срабатывания РУ2: замыкается контакт РУ2, катушка
По истечении времени t2, времени срабатывания РУ2: замыкается контакт РУ2, катушка
 Равнодействующая сил
Равнодействующая сил Protein structure: prediction engineering design
Protein structure: prediction engineering design Механика жидкостей и газов. (Лекция 9)
Механика жидкостей и газов. (Лекция 9) Масса тела
Масса тела Ремонт автомобилей. Ремонт коленчатых валов и шатунов. (Тема 4.5)
Ремонт автомобилей. Ремонт коленчатых валов и шатунов. (Тема 4.5) Техническое обслуживание рулевого управления автомобиля Toyota Mark II
Техническое обслуживание рулевого управления автомобиля Toyota Mark II Простые механизмы в технике и в быту
Простые механизмы в технике и в быту Машиноведение. История создания швейной машины
Машиноведение. История создания швейной машины Тепловое излучение. Задачи
Тепловое излучение. Задачи Что изучает физика? Некоторые физические термины
Что изучает физика? Некоторые физические термины Прості механізми побутових пристроїв
Прості механізми побутових пристроїв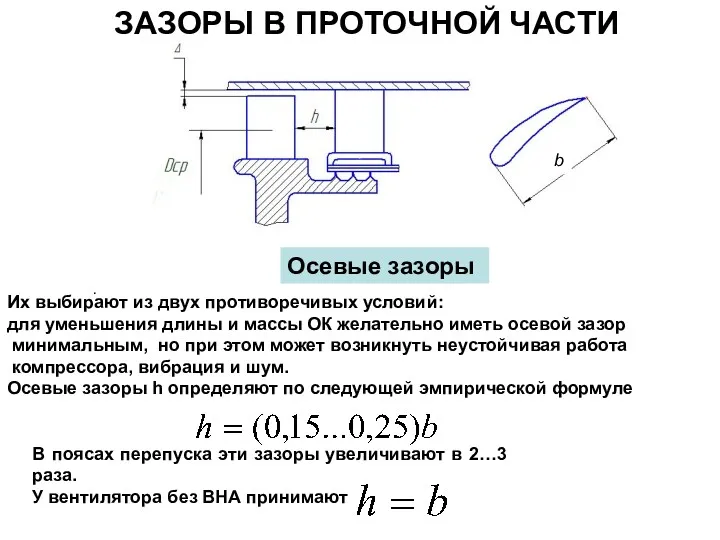 Зазоры в проточной части
Зазоры в проточной части Магнитное поле. Взаимодействие токов
Магнитное поле. Взаимодействие токов Механізація подрібнення стеблових кормів
Механізація подрібнення стеблових кормів Сила трения. Трение в природе и технике
Сила трения. Трение в природе и технике Ремонт авиационного оборудования с боевыми и эксплуатационными повреждениями
Ремонт авиационного оборудования с боевыми и эксплуатационными повреждениями Коробки перемены передач
Коробки перемены передач Электромагнитное поле
Электромагнитное поле Физика в нашей жизни
Физика в нашей жизни Влияние на работу дороги природных факторов
Влияние на работу дороги природных факторов Внутрішня енергія
Внутрішня енергія Основы поверхностной обработки полупроводниковых материалов
Основы поверхностной обработки полупроводниковых материалов Урок презентация Реактивное движение
Урок презентация Реактивное движение Закон Ома на участке цепи. Диаграмма связи величин: U, I, R
Закон Ома на участке цепи. Диаграмма связи величин: U, I, R Разработка установки для замены масла в двигателе
Разработка установки для замены масла в двигателе Закон всемирного тяготения
Закон всемирного тяготения Магнитное поле
Магнитное поле Ионизирующие излучения
Ионизирующие излучения