- Механическое движение. Виды движений. Кинематика материальной точки. Силы в механике

Содержание
- 2. Литература: 1.Сазонова З.С., Ткачева Т.М., Чечеткина Н.В. Литература: 1.Смык А.Ф. Курс Физики,2016 2.Захаров В.Г. Физика для
- 3. Лекция 1 Механическое движение. Виды движений Кинематика материальной точки. Криволинейное движение. Тангенциальное и нормальное ускорения Динамика
- 4. 1.Механическое движение Механическое движение- изменение положения тел друг относительно друга с течением времени. Физическое тело: Тело,
- 5. Определение положения тела Совокупность неподвижных друг относительно друга тел, по отношению к которым рассматривается движение, и
- 6. Рене Декарт (1596–1650). Декартова система координат
- 7. Степени свободы Числом степеней свободы механической системы называется число независимы величин, с помощью которых может быть
- 8. Поступательное движение Движение АбсТвТ можно разложить на два основных вида движения – поступательное и вращательное. Поступательное
- 9. Поступательное движение АбТвТ При поступательном движении АТТ все его точки перемещаются по одинаковым траекториям и имеют
- 10. Вращательное движение При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной
- 11. Кинематика МТ МТ при своем движении описывает некоторую линию, которая называется траекторией. Расстояние между начальным и
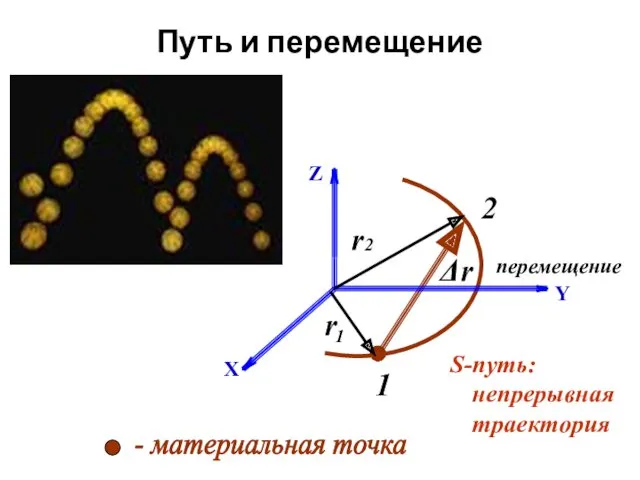
- 12. 1 2 Δr Путь и перемещение перемещение
- 13. Описание движения в координатной и векторной форме Выберем декартову с.к., в которой положение материальной точки характеризуется
- 14. Средняя скорость перемещения и средняя путевая скорость Средняя скорость перемещения- это векторная величина, равная отношению вектора
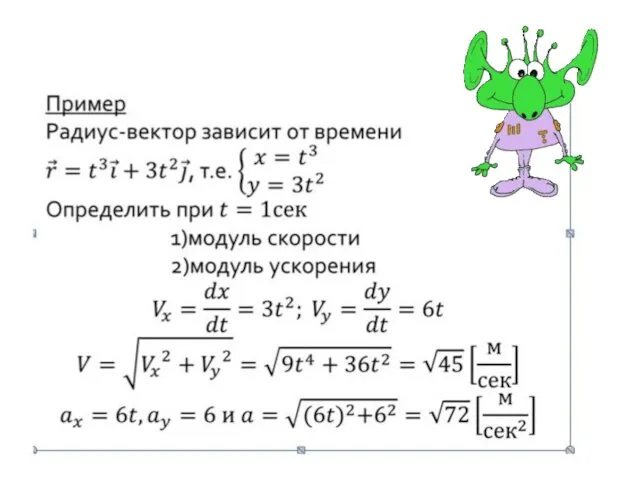
- 15. Скорость Мгновенная скорость: Модуль скорости :
- 16. Ускорение Мгновенное ускорение: Модуль ускорения:
- 17. Путь Путь, пройденный материальной точкой за промежуток времени от t1 до t2 равен определенному интегралу: На
- 19. Уравнения равноускоренного движения Уравнение равноускоренного движения в скалярной форме Уравнение равноускоренного движения в проекциях на оси
- 20. Криволинейное движение Полное ускорение a материальной точки может быть представлено как сумма двух векторов тангенциального и
- 21. Тангенциальное и нормальное ускорения При криволинейном движении вектор скорости частицы направлен по касательной к траектории. Это
- 22. Пример . Тело брошено под углом α к горизонту со скоростью . Чему равно нормальное и
- 23. Динамика изучает движение тел в связи с теми причинами(силами), которые обуславливают тот или иной характер движения.
- 24. Количественной мерой инертности является масса. Масса – величина скалярная и обладает свойством аддитивности. Количество движения характеризуется
- 25. Законы Ньютона 28 апр. 1686 г. представил Лондонскому королевскому обществу свою новую теорию – механику земных
- 26. 1 закон Ньютона Всякое тело находится в состоянии покоя или равномерного и прямолинейного движения, пока воздействие
- 27. Инерциальные системы отсчета Гелиоцентрическая (звездная) система отсчета: начало координат – в центре Солнца, оси проведены в
- 28. (2 закон Ньютона) Скорость изменения импульса тела равна действующей на тело силе: Если масса тела остается
- 29. 3 закон Ньютона Силы, с которыми действуют друг на друга взаимодействующие тела, равны по величине и
- 30. Принцип относительности Галилея Галилео Галилей (1564 – 1642) Уравнения динамики не изменяются при переходе от одной
- 31. Преобразования Галилея
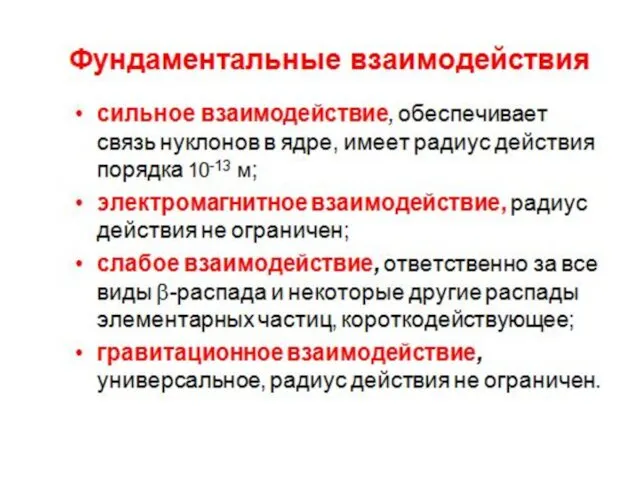
- 32. Силы Фундаментальные взаимодействия: гравитационные, электромагнитные, сильные, слабые. В классической механике рассматриваются: гравитационные силы (сила тяжести) электромагнитные
- 34. Сила тяжести и вес тела В система отсчета, связанной с Землей, на всякой тело действует сила
- 35. Вес тела. Изменение веса тела Вес тела Вес тела В общем случае При ускоренном движении по
- 36. Закон Гука Опыт показывает, что при небольших деформациях удлинение пружины оказывается пропорциональным внешней силе F=kΔL, где
- 37. Сила трения скольжения Схематическое изображение места контакта скользящих поверхностей при малой (верх) и большой (низ) сжимающей
- 39. Скачать презентацию
Литература:
1.Сазонова З.С., Ткачева Т.М., Чечеткина Н.В.
Литература:
1.Смык А.Ф.
Курс Физики,2016
2.Захаров В.Г.
Литература:
1.Сазонова З.С., Ткачева Т.М., Чечеткина Н.В.
Литература:
1.Смык А.Ф.
Курс Физики,2016
2.Захаров В.Г.
Лекция 1
Механическое движение. Виды движений
Кинематика материальной точки. Криволинейное движение. Тангенциальное и
Лекция 1
Механическое движение. Виды движений
Кинематика материальной точки. Криволинейное движение. Тангенциальное и
1.Механическое движение
Механическое движение- изменение положения тел друг относительно друга с течением
1.Механическое движение
Механическое движение- изменение положения тел друг относительно друга с течением
Определение положения тела
Совокупность неподвижных друг относительно друга тел, по отношению
Определение положения тела
Совокупность неподвижных друг относительно друга тел, по отношению
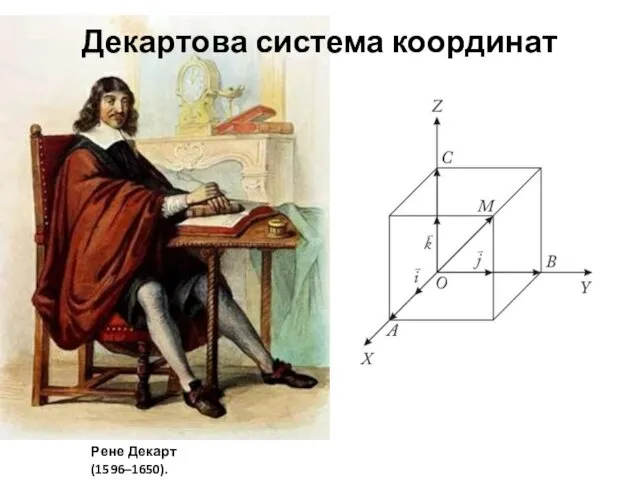
Рене Декарт (1596–1650).
Декартова система координат
Рене Декарт (1596–1650).
Декартова система координат
Степени свободы
Числом степеней свободы механической системы называется число независимы величин, с
Степени свободы
Числом степеней свободы механической системы называется число независимы величин, с
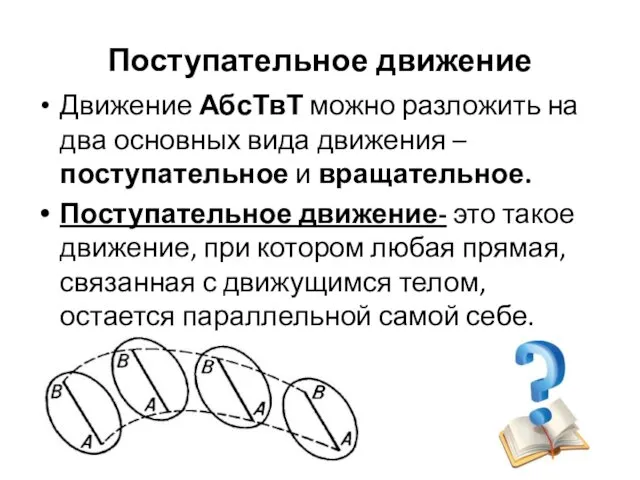
Поступательное движение
Движение АбсТвТ можно разложить на два основных вида движения –
Поступательное движение
Движение АбсТвТ можно разложить на два основных вида движения –
Поступательное движение АбТвТ
При поступательном движении АТТ все его точки перемещаются по
Поступательное движение АбТвТ
При поступательном движении АТТ все его точки перемещаются по
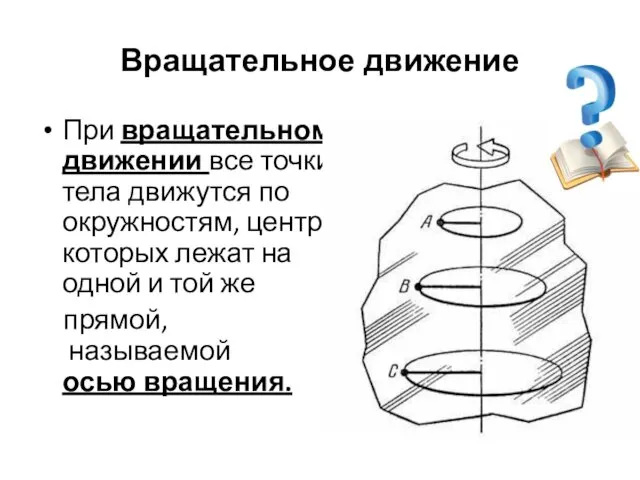
Вращательное движение
При вращательном
движении все точки
тела движутся по
окружностям, центры
Вращательное движение
При вращательном движении все точки тела движутся по окружностям, центры
Кинематика МТ
МТ при своем движении описывает некоторую линию, которая называется траекторией.
Расстояние
Кинематика МТ
МТ при своем движении описывает некоторую линию, которая называется траекторией.
Расстояние
1
2
Δr
Путь и перемещение
перемещение
1
2
Δr
Путь и перемещение
перемещение
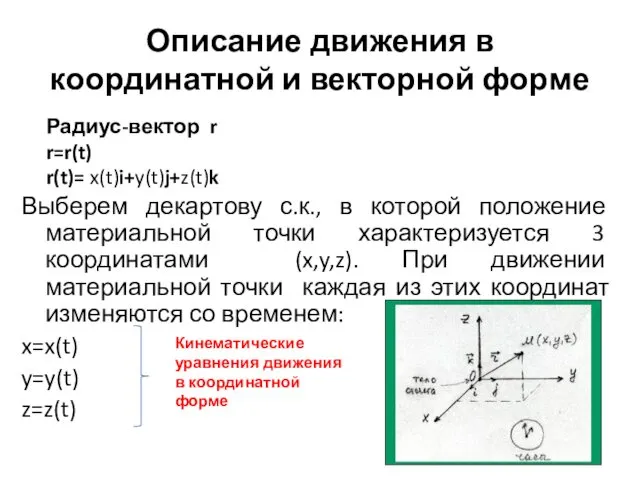
Описание движения в координатной и векторной форме
Выберем декартову с.к., в которой
Описание движения в координатной и векторной форме
Выберем декартову с.к., в которой
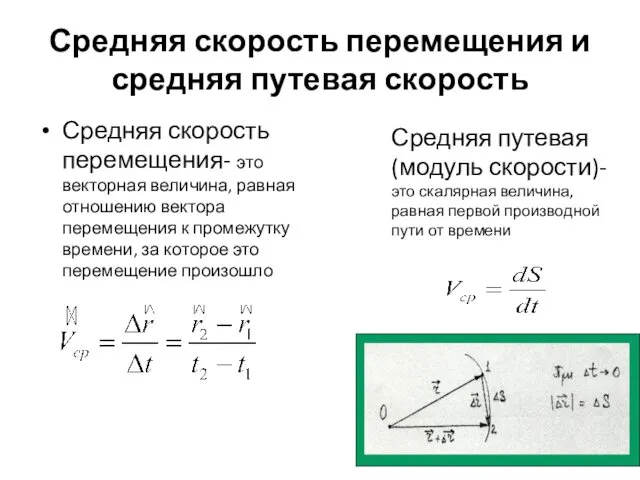
Средняя скорость перемещения и средняя путевая скорость
Средняя скорость перемещения- это векторная
Средняя скорость перемещения и средняя путевая скорость
Средняя скорость перемещения- это векторная
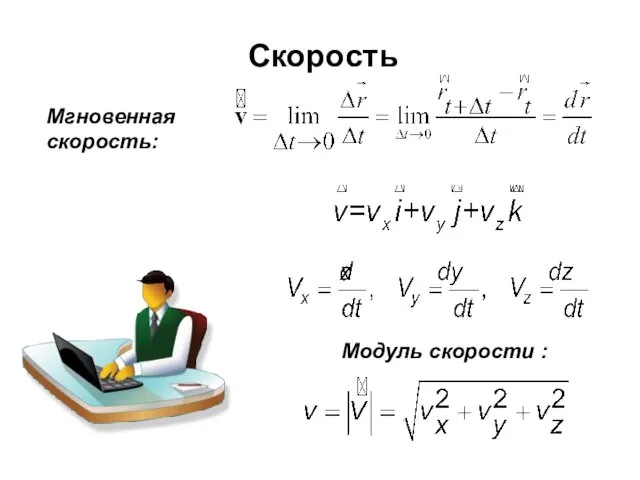
Скорость
Мгновенная
скорость:
Модуль скорости :
Скорость
Мгновенная
скорость:
Модуль скорости :
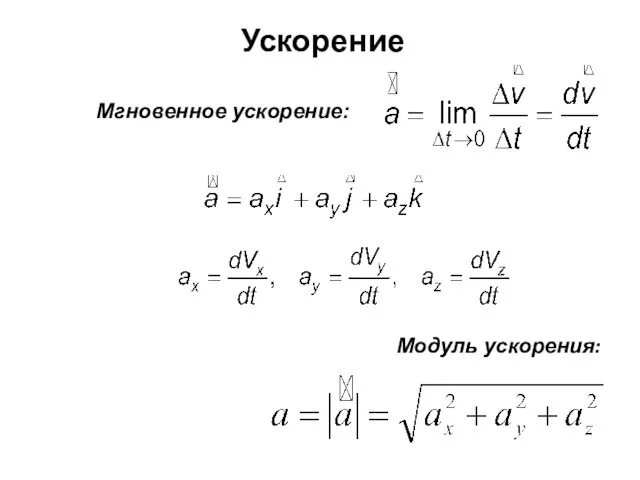
Ускорение
Мгновенное ускорение:
Модуль ускорения:
Ускорение
Мгновенное ускорение:
Модуль ускорения:
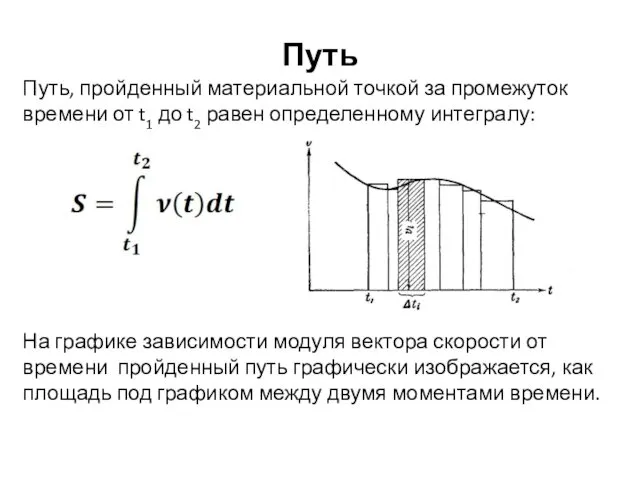
Путь
Путь, пройденный материальной точкой за промежуток времени от t1 до t2
Путь
Путь, пройденный материальной точкой за промежуток времени от t1 до t2
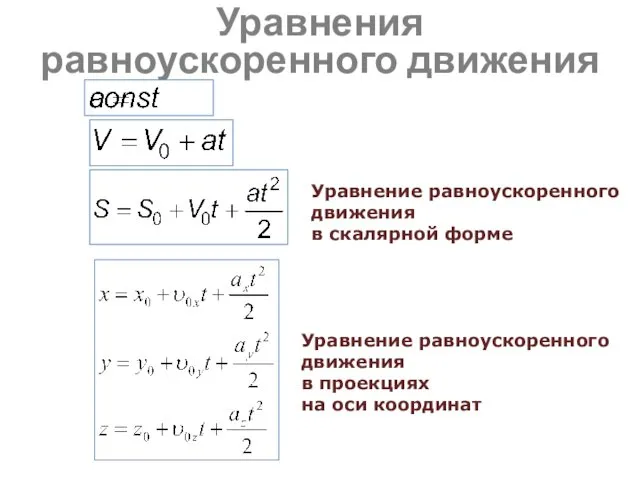
Уравнения
равноускоренного движения
Уравнение равноускоренного движения
в скалярной форме
Уравнение равноускоренного движения
в проекциях
Уравнения
равноускоренного движения
Уравнение равноускоренного движения
в скалярной форме
Уравнение равноускоренного движения
в проекциях
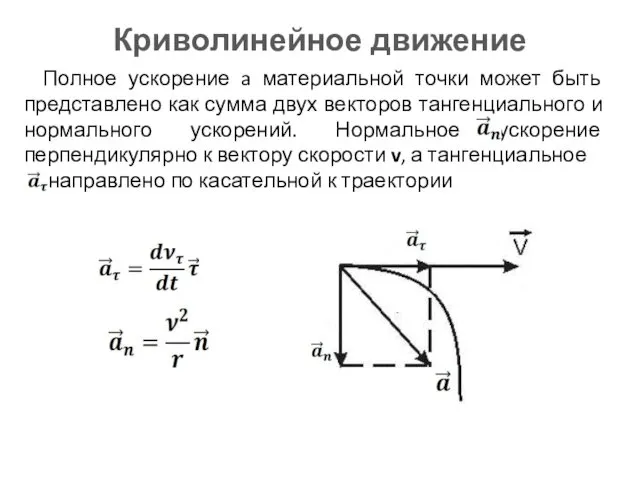
Криволинейное движение
Полное ускорение a материальной точки может быть представлено как
Криволинейное движение
Полное ускорение a материальной точки может быть представлено как

Тангенциальное и нормальное ускорения
При криволинейном движении вектор скорости частицы направлен по
Тангенциальное и нормальное ускорения
При криволинейном движении вектор скорости частицы направлен по
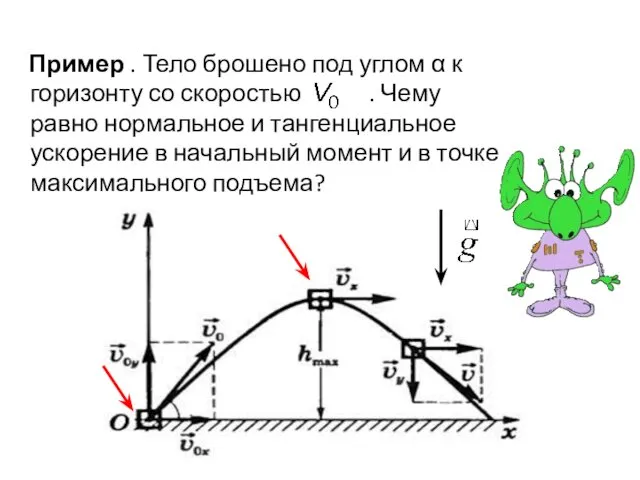
Пример . Тело брошено под углом α к горизонту со
Пример . Тело брошено под углом α к горизонту со
Динамика изучает движение тел в связи с теми причинами(силами), которые
Динамика изучает движение тел в связи с теми причинами(силами), которые
Количественной мерой
инертности является масса.
Масса – величина скалярная
и обладает свойством
Количественной мерой
инертности является масса.
Масса – величина скалярная
и обладает свойством
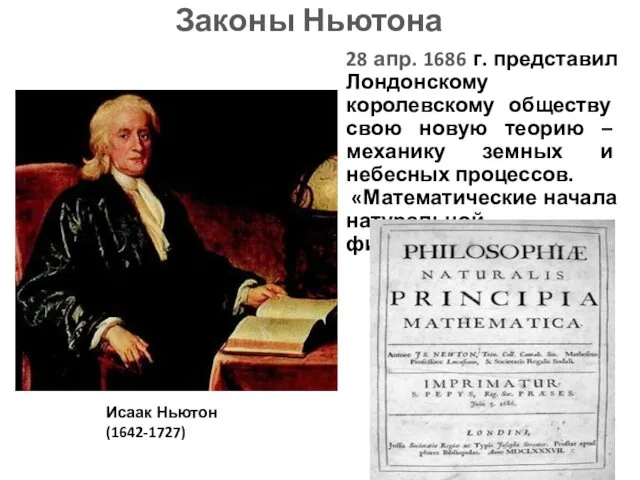
Законы Ньютона
28 апр. 1686 г. представил Лондонскому королевскому обществу свою новую
Законы Ньютона
28 апр. 1686 г. представил Лондонскому королевскому обществу свою новую
1 закон Ньютона
Всякое тело находится в состоянии покоя или равномерного и
1 закон Ньютона
Всякое тело находится в состоянии покоя или равномерного и
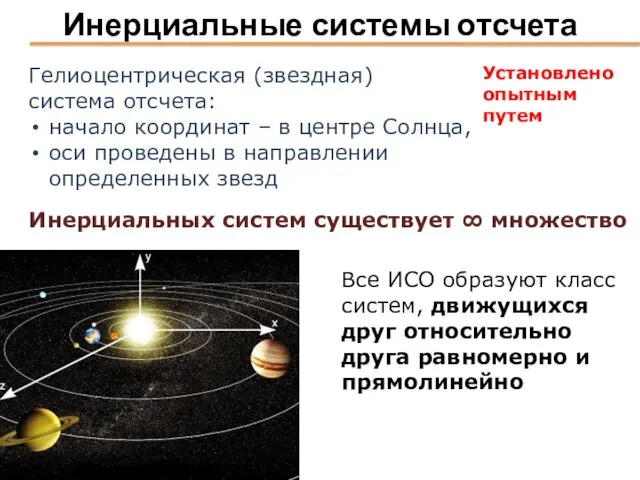
Инерциальные системы отсчета
Гелиоцентрическая (звездная)
система отсчета:
начало координат – в центре Солнца,
оси
Инерциальные системы отсчета
Гелиоцентрическая (звездная)
система отсчета:
начало координат – в центре Солнца,
оси
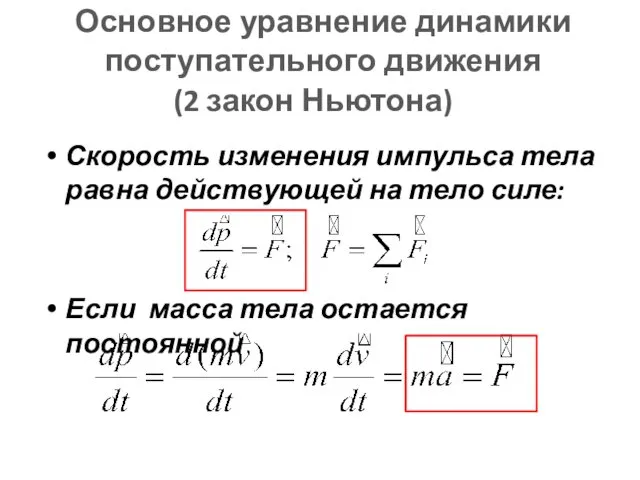
(2 закон Ньютона)
Скорость изменения импульса тела равна действующей на тело силе:
Если
(2 закон Ньютона)
Скорость изменения импульса тела равна действующей на тело силе:
Если
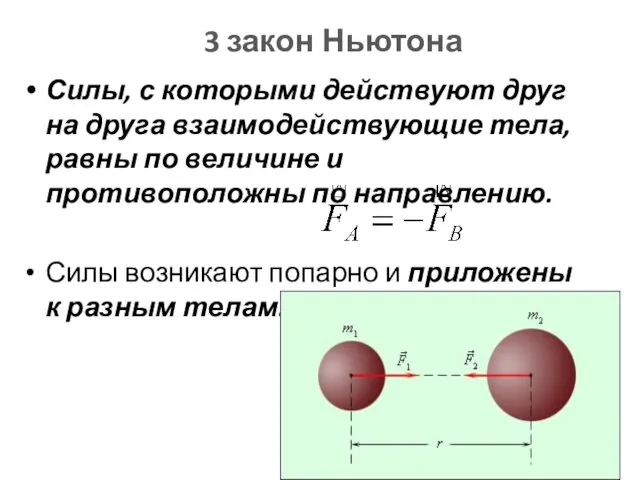
3 закон Ньютона
Силы, с которыми действуют друг на друга взаимодействующие тела,
3 закон Ньютона
Силы, с которыми действуют друг на друга взаимодействующие тела,
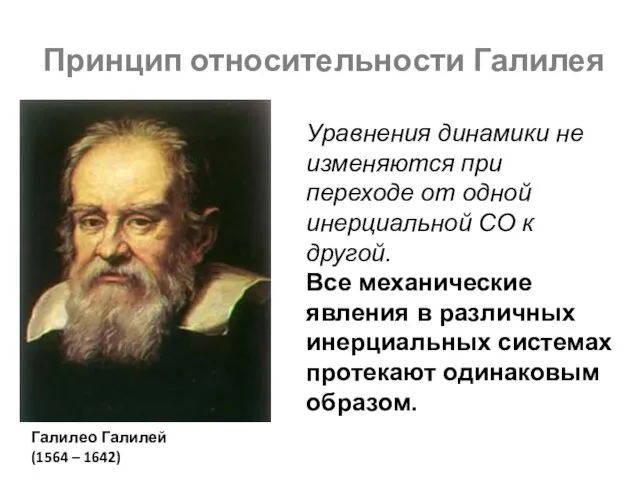
Принцип относительности Галилея
Галилео Галилей
(1564 – 1642)
Уравнения динамики не изменяются при
Принцип относительности Галилея
Галилео Галилей
(1564 – 1642)
Уравнения динамики не изменяются при

Преобразования Галилея
Преобразования Галилея
Силы
Фундаментальные
взаимодействия:
гравитационные,
электромагнитные,
сильные,
слабые.
В классической механике рассматриваются:
гравитационные силы
Силы
Фундаментальные
взаимодействия:
гравитационные,
электромагнитные,
сильные,
слабые.
В классической механике рассматриваются:
гравитационные силы
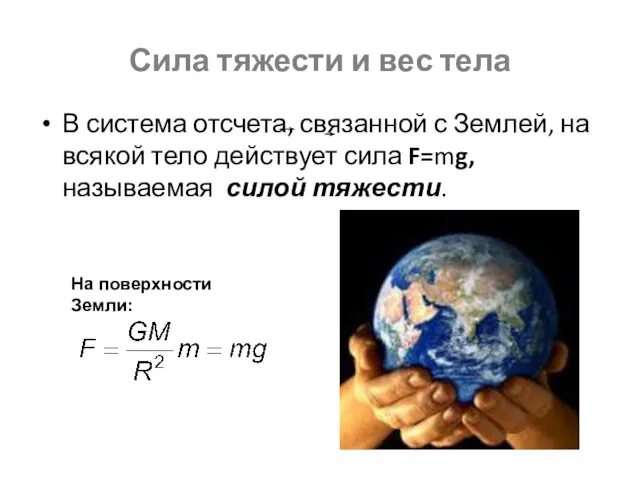
Сила тяжести и вес тела
В система отсчета, связанной с Землей, на
Сила тяжести и вес тела
В система отсчета, связанной с Землей, на
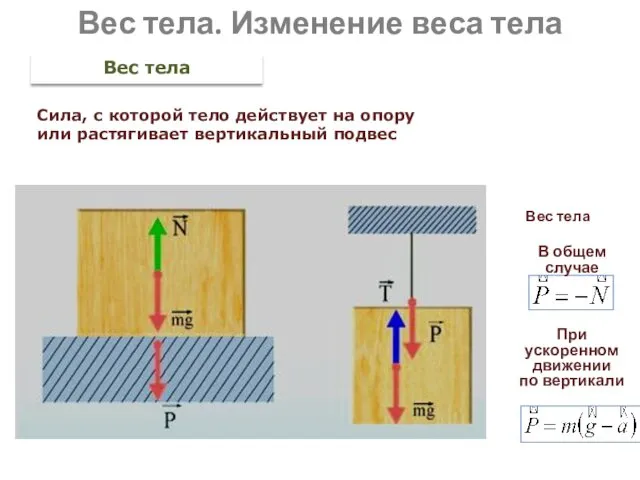
Вес тела. Изменение веса тела
Вес тела
Вес тела
В общем случае
При ускоренном движении
Вес тела. Изменение веса тела
Вес тела
Вес тела
В общем случае
При ускоренном движении
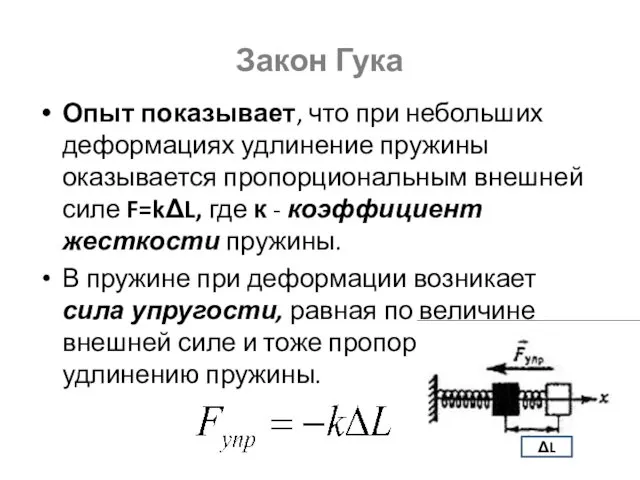
Закон Гука
Опыт показывает, что при небольших деформациях удлинение пружины оказывается пропорциональным
Закон Гука
Опыт показывает, что при небольших деформациях удлинение пружины оказывается пропорциональным
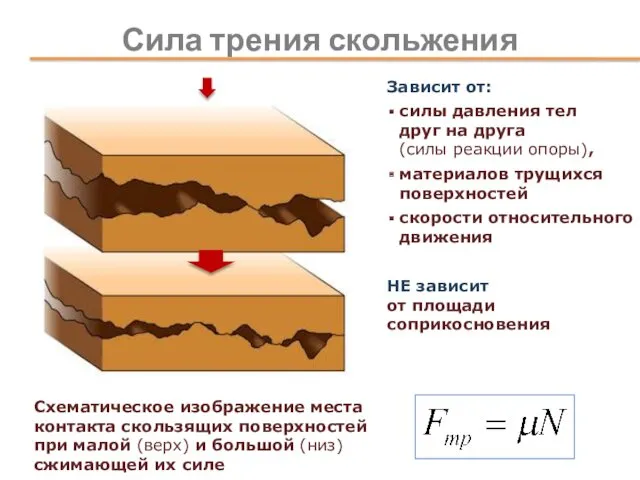
Сила трения скольжения
Схематическое изображение места контакта скользящих поверхностей
при малой (верх)
Сила трения скольжения
Схематическое изображение места контакта скользящих поверхностей при малой (верх)
 Материаловедение
Материаловедение Урок узагальнення та систематизації знань з теми Теплові явища. Розв’язування задач. 8 клас
Урок узагальнення та систематизації знань з теми Теплові явища. Розв’язування задач. 8 клас Направление тока и направление линий его магнитного поля. (Урок 40)
Направление тока и направление линий его магнитного поля. (Урок 40) Инструменты. Правила безопасности
Инструменты. Правила безопасности Сила Лоренца
Сила Лоренца Атмосферное давление . Опыт Торричелли. Билет № 22. Нормальное атмосферное давление
Атмосферное давление . Опыт Торричелли. Билет № 22. Нормальное атмосферное давление Элементы векторной алгебры. Декартовая система координат
Элементы векторной алгебры. Декартовая система координат Первый закон термодинамики
Первый закон термодинамики Влияние радиоактивных излучений на живые организмы. Защита от опасного воздействия на организм человека радиоактивных излучений.
Влияние радиоактивных излучений на живые организмы. Защита от опасного воздействия на организм человека радиоактивных излучений. Комплект сборного расточного инструмента
Комплект сборного расточного инструмента Методы определения реологических свойств
Методы определения реологических свойств Принципы нанотехнологий
Принципы нанотехнологий Определение плотности куска мыла
Определение плотности куска мыла Поліпшення ефективності експлуатації газотурбокомпресорів суднових дизелів шляхом спостереження ix технічного стану
Поліпшення ефективності експлуатації газотурбокомпресорів суднових дизелів шляхом спостереження ix технічного стану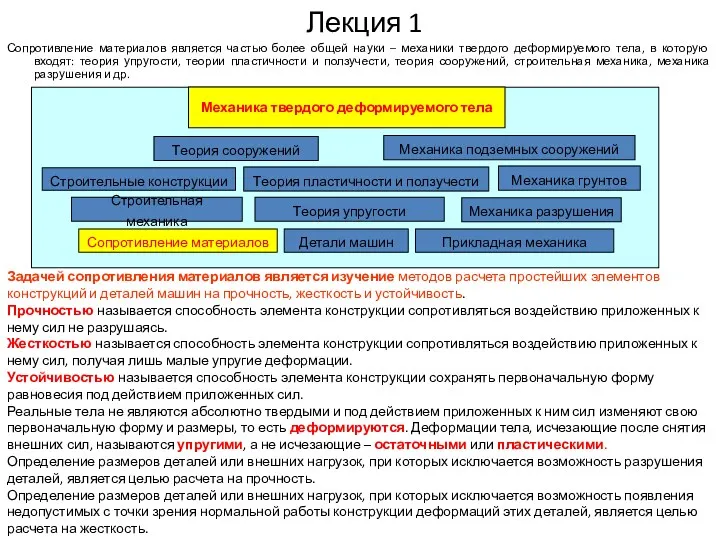 Механика твердого деформируемого тела
Механика твердого деформируемого тела Статистические характеристики шума на выходе БВЧ. Квазигармоническое колебание. Белый шум
Статистические характеристики шума на выходе БВЧ. Квазигармоническое колебание. Белый шум Ценностные и правовые регулятивы развития новых технологий и направлений науки. Тема 5
Ценностные и правовые регулятивы развития новых технологий и направлений науки. Тема 5 ГАПОУ ОАТК им. В.Н. Бевзюка. Ремонт кузова легкового автомобиля
ГАПОУ ОАТК им. В.Н. Бевзюка. Ремонт кузова легкового автомобиля Жидкостные термометры
Жидкостные термометры Системы управления автомобилем
Системы управления автомобилем Потери в сверхпроводниках с сильным пиннингом. Криогенные и сверхпроводящие электроэнергетические устройства. Лекция 9
Потери в сверхпроводниках с сильным пиннингом. Криогенные и сверхпроводящие электроэнергетические устройства. Лекция 9 Закон Кулона. Единица электрического заряда
Закон Кулона. Единица электрического заряда Презентация по физике 7 класс. Тема: Плотность вещества
Презентация по физике 7 класс. Тема: Плотность вещества Механические колебания
Механические колебания Сложение гармонических колебаний
Сложение гармонических колебаний Основные физические свойства жидкостей и газов. Гидростатика
Основные физические свойства жидкостей и газов. Гидростатика Наноматеріали
Наноматеріали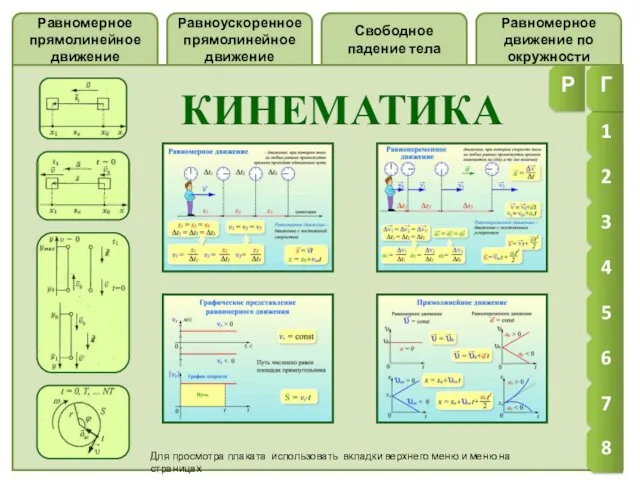 Кинематика
Кинематика