- Основные понятия теории механизмов и машин

Содержание
- 2. Основные понятия теории механизмов и машин. Понятие о кинематических парах Механическая цепь и механизм. Степень свободы
- 3. Машины – это системы, служащие для передачи и преобразования механической работы. Приборы – это системы, служащие
- 4. Вращательные кинематические пары. Вращательные кинематические пары обеспечивают только вращательное относительное движение Винт Корпус Колесо Болт Звено
- 5. Поступательные кинематические пары Поступательные кинематические пары обеспечивают только поступательное относительное движение Ползун Направляющая
- 6. Высшие кинематические пары Высшими называются кинематические пары в которых соприкосновение звеньев в сочленении происходит по линии
- 7. Классификация кинематических пар
- 8. Кинематические цепи. Последовательное соединение звеньев кинематическими парами называется кинематической цепью Разомкнутые кинематические цепи Замкнутые кинематические цепи
- 9. Понятие о механизме Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном. Замкнутая кинематическая цепь Механизм
- 10. Под числом степеней свободы понимают число независимых параметров определяющих положение всех звеньев механизма. Для представленного механизма
- 11. Для определения степени свободы механизма необходимо последовательным закреплением звеньев к стойке превратить его в ферму. Число
- 12. Степень свободы механизма Механизм имеет 5 звеньев (n=5) и 5 кинематических пар 5 класса (P5=5) W=3(n-1)-2P5-P4=3·(5-1)-2·5=12-10=2
- 13. Точка касания Замены высших кинематических пар W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1 W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1 W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1 W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1 W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1 W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
- 14. Избыточные связи W=3(n-1)-2P5=3(5-1)-2·6=0 W=3(n-1)-2P5=3(4-1)-2·4=1 W=3(n-1)-2P5=3(3-1)-2·2-1=1 W=3(n-1)-2P5=3(4-1)-2·3-1=2 Лишние степени свободы
- 15. Образование механизма по Л.В. Ассуру Большинство механизмов в технике имеют одну степень подвижности W=1. Как получить
- 16. Учитывая, что степень свободы основной и полученной системы W=1, получим из второго уравнения 1 = 1
- 17. Рассмотрим выполняется ли для нее условие кинематической группы W=3n – 2p5=3·2 - 2·1=4, число кинематических пар
- 18. Классификация кинематических групп Группа 3 класса 3 порядка Группа 3 класса 4 порядка Группа 4 класса
- 19. Классификация механизмов Класс и порядок механизма определяется наивысшим классом и порядком кинематической группы входящей в данный
- 20. Пример структурного анализа механизма 1.Стойка 2.Кривошип 3.Камень кулисы 4.Коромысло(кулиса) 5.Шатун 6.Ползун
- 21. Звено совершающее плоскопараллельное движение называется шатуном Звено совершающее полный оборот вокруг оси называется кривошипом; Звено в
- 22. Пример структурного анализа механизма в) диада в которой звенья соединены между собой вращательной парой—группа 2 класса,
- 24. Скачать презентацию
Основные понятия
теории механизмов и машин.
Понятие о кинематических парах
Механическая цепь
Основные понятия
теории механизмов и машин.
Понятие о кинематических парах
Механическая цепь
Машины – это системы, служащие для передачи и преобразования механической работы.
Приборы
Машины – это системы, служащие для передачи и преобразования механической работы.
Приборы

Вращательные кинематические пары.
Вращательные кинематические пары обеспечивают только
вращательное относительное движение
Винт
Корпус
Колесо
Болт
Звено
Вращательные кинематические пары.
Вращательные кинематические пары обеспечивают только
вращательное относительное движение
Винт
Корпус
Колесо
Болт
Звено
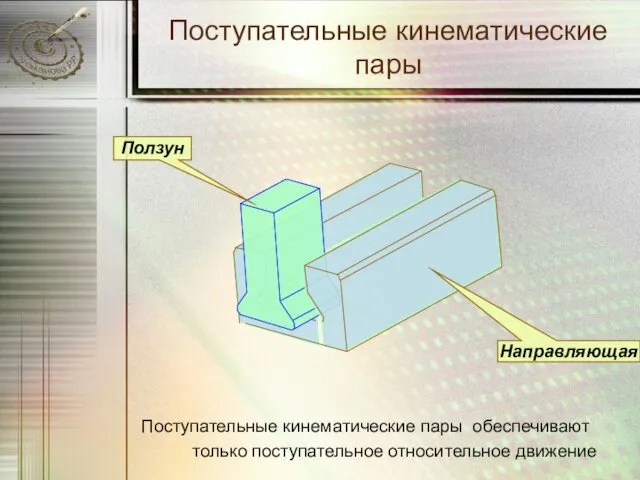
Поступательные кинематические пары
Поступательные кинематические пары обеспечивают
только поступательное относительное движение
Поступательные кинематические пары
Поступательные кинематические пары обеспечивают
только поступательное относительное движение
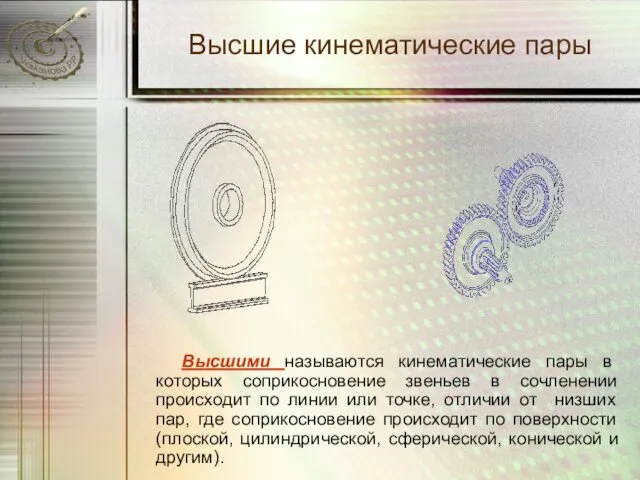
Высшие кинематические пары
Высшими называются кинематические пары в которых соприкосновение звеньев
Высшие кинематические пары
Высшими называются кинематические пары в которых соприкосновение звеньев

Классификация кинематических пар
Классификация кинематических пар

Кинематические цепи.
Последовательное соединение звеньев кинематическими парами называется
кинематической цепью
Разомкнутые
Кинематические цепи.
Последовательное соединение звеньев кинематическими парами называется
кинематической цепью
Разомкнутые

Понятие о механизме
Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном.
Понятие о механизме
Механизмом называется замкнутая кинематическая цепь с одним неподвижным звеном.
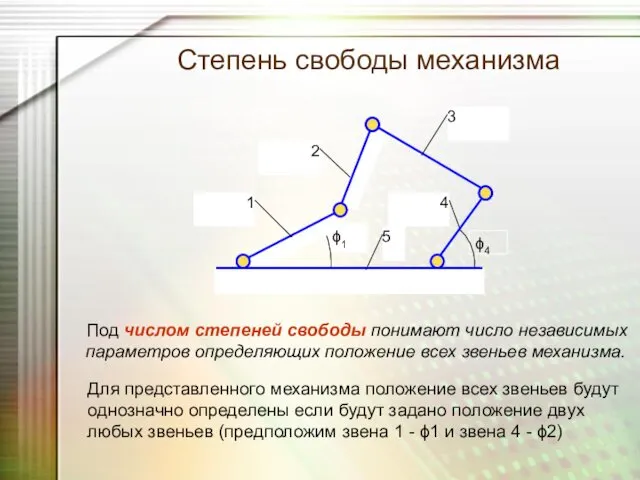
Под числом степеней свободы понимают число независимых параметров определяющих положение всех
Под числом степеней свободы понимают число независимых параметров определяющих положение всех
Для определения степени свободы механизма необходимо последовательным закреплением звеньев к
Для определения степени свободы механизма необходимо последовательным закреплением звеньев к
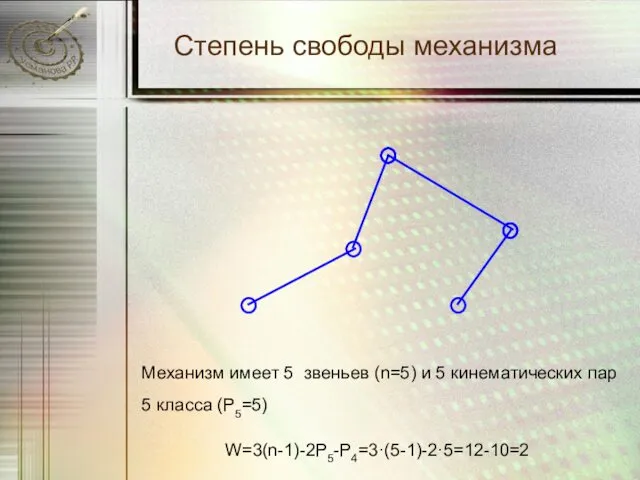
Степень свободы механизма
Механизм имеет 5 звеньев (n=5) и 5 кинематических пар
Степень свободы механизма
Механизм имеет 5 звеньев (n=5) и 5 кинематических пар
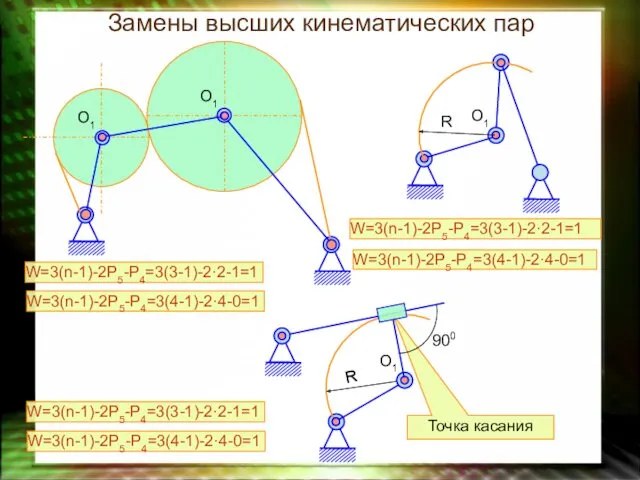
Точка касания
Замены высших кинематических пар
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
Точка касания
Замены высших кинематических пар
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1
W=3(n-1)-2P5-P4=3(3-1)-2·2-1=1
W=3(n-1)-2P5-P4=3(4-1)-2·4-0=1

Избыточные связи
W=3(n-1)-2P5=3(5-1)-2·6=0
W=3(n-1)-2P5=3(4-1)-2·4=1
W=3(n-1)-2P5=3(3-1)-2·2-1=1
W=3(n-1)-2P5=3(4-1)-2·3-1=2
Лишние степени свободы
Избыточные связи
W=3(n-1)-2P5=3(5-1)-2·6=0
W=3(n-1)-2P5=3(4-1)-2·4=1
W=3(n-1)-2P5=3(3-1)-2·2-1=1
W=3(n-1)-2P5=3(4-1)-2·3-1=2
Лишние степени свободы
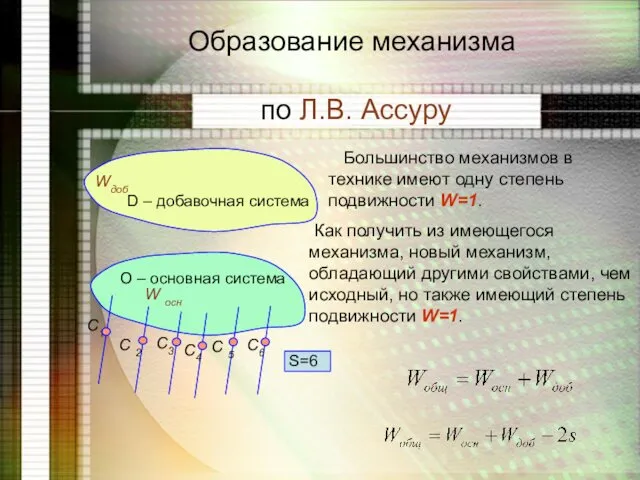
Образование механизма
по Л.В. Ассуру
Большинство механизмов в технике имеют одну
Образование механизма
по Л.В. Ассуру
Большинство механизмов в технике имеют одну
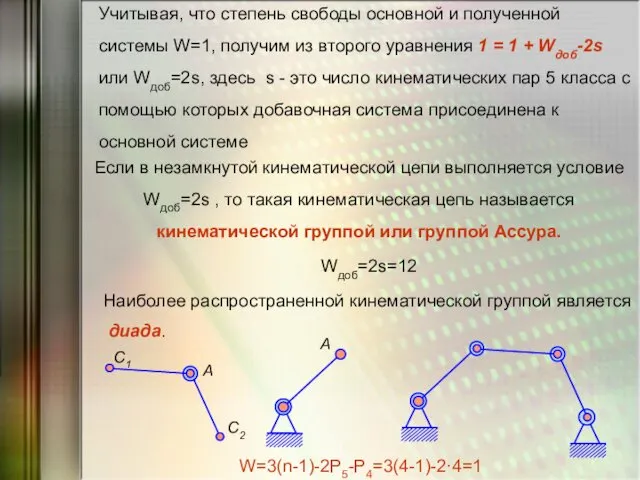
Учитывая, что степень свободы основной и полученной системы W=1, получим из
Учитывая, что степень свободы основной и полученной системы W=1, получим из
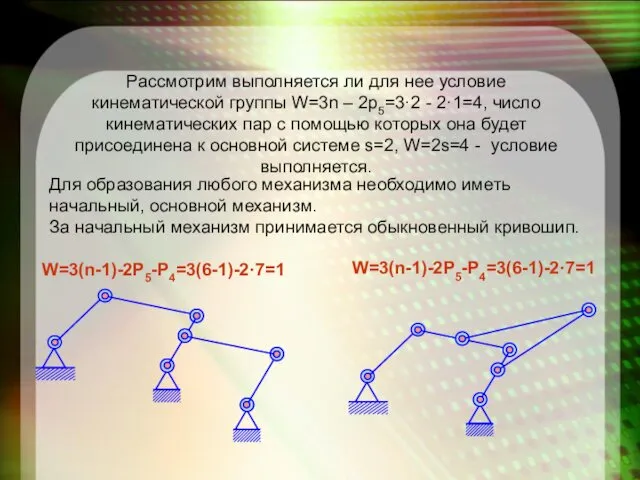
Рассмотрим выполняется ли для нее условие кинематической группы W=3n – 2p5=3·2
Рассмотрим выполняется ли для нее условие кинематической группы W=3n – 2p5=3·2
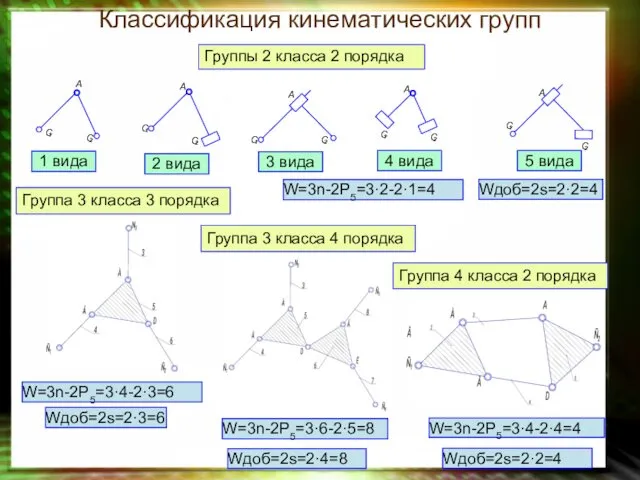
Классификация кинематических групп
Группа 3 класса 3 порядка
Группа 3 класса 4 порядка
Группа
Классификация кинематических групп
Группа 3 класса 3 порядка
Группа 3 класса 4 порядка
Группа
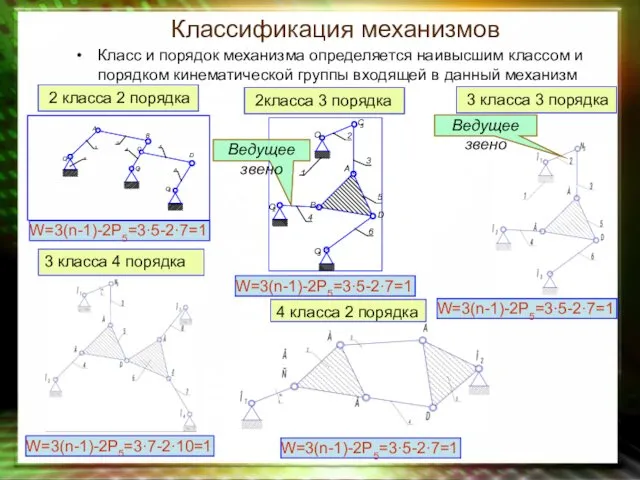
Классификация механизмов
Класс и порядок механизма определяется наивысшим классом и порядком кинематической
Классификация механизмов
Класс и порядок механизма определяется наивысшим классом и порядком кинематической
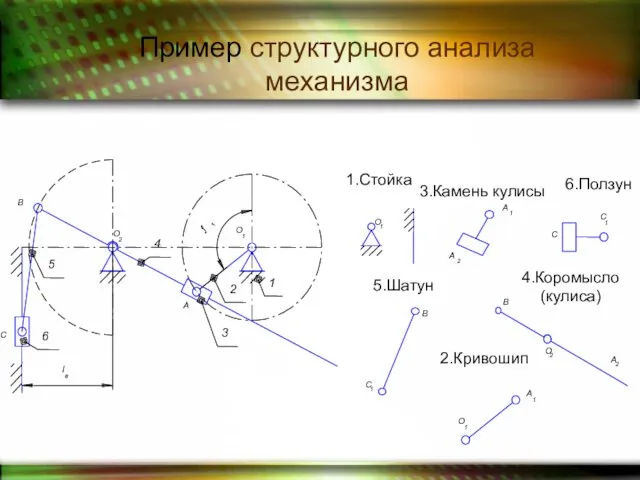
Пример структурного анализа механизма
1.Стойка
2.Кривошип
3.Камень кулисы
4.Коромысло(кулиса)
5.Шатун
6.Ползун
Пример структурного анализа механизма
1.Стойка
2.Кривошип
3.Камень кулисы
4.Коромысло(кулиса)
5.Шатун
6.Ползун
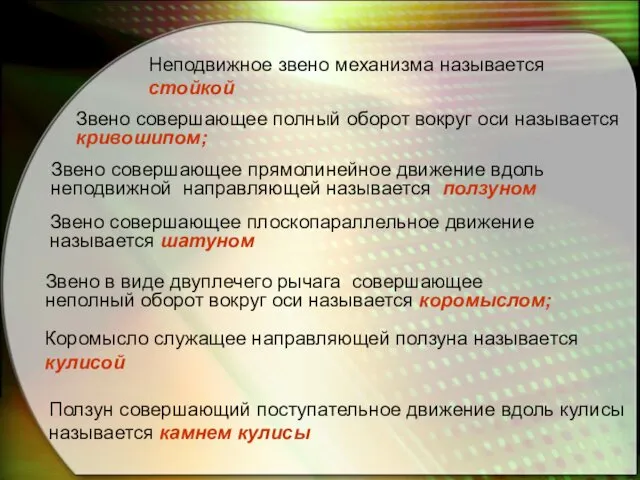
Звено совершающее плоскопараллельное движение называется шатуном
Звено совершающее полный оборот вокруг
Звено совершающее плоскопараллельное движение называется шатуном
Звено совершающее полный оборот вокруг

Пример структурного анализа механизма
в) диада в которой звенья соединены между собой
Пример структурного анализа механизма
в) диада в которой звенья соединены между собой
 Поляриметрический анализ. Лекция №13
Поляриметрический анализ. Лекция №13 ВКР: Модернизация ремонтной мастерской с разработкой установки для пескоструйной очистки деталей
ВКР: Модернизация ремонтной мастерской с разработкой установки для пескоструйной очистки деталей Тасымалдау құбылысы. Нақты газдар
Тасымалдау құбылысы. Нақты газдар Динамика вращательного движения твердого тела. Основное уравнение динамики вращательного движения. Момент инерции твердого тела
Динамика вращательного движения твердого тела. Основное уравнение динамики вращательного движения. Момент инерции твердого тела Количество теплоты. Уравнение теплового баланса
Количество теплоты. Уравнение теплового баланса Схемы соединения потребителей трехфазного тока
Схемы соединения потребителей трехфазного тока Автомобиль и люди
Автомобиль и люди Презентация Звуковые явления
Презентация Звуковые явления Дифракция и интерференция света
Дифракция и интерференция света Определение емкостного, индуктивного и полного сопротивления цепи
Определение емкостного, индуктивного и полного сопротивления цепи Тепловые двигатели и охрана окружающей среды
Тепловые двигатели и охрана окружающей среды Основные понятия электросвязи. Информация, сообщение, сигнал
Основные понятия электросвязи. Информация, сообщение, сигнал Теорія електромагнітного поля
Теорія електромагнітного поля Реактивний рух. Фізичні основи ракетної техніки. Досягнення космонавтики (9 клас)
Реактивний рух. Фізичні основи ракетної техніки. Досягнення космонавтики (9 клас) Электрическое сопротивление
Электрическое сопротивление М.В.Ломоносов
М.В.Ломоносов Механическое движение. Задача на расчет средней скорости
Механическое движение. Задача на расчет средней скорости Дифракция света
Дифракция света Элементарные частицы
Элементарные частицы Коэффициент полезного действия тепловых двигателей
Коэффициент полезного действия тепловых двигателей Некоторые средства развития познавательного интереса на уроках физики 7-8 классов.
Некоторые средства развития познавательного интереса на уроках физики 7-8 классов. Пр-во, передача и исп-е эл. энергии
Пр-во, передача и исп-е эл. энергии Фотолитография. Практическое занятие 4
Фотолитография. Практическое занятие 4 Гидростатика
Гидростатика Энергия. Потенциальная и кинетическая энергия
Энергия. Потенциальная и кинетическая энергия Расчёт отдельных участков контура циркуляции воды
Расчёт отдельных участков контура циркуляции воды Газовый лазер
Газовый лазер Простые механизмы
Простые механизмы