- Порядок выбора объектов автоматизации

Содержание
- 2. Порядок автоматизации: - выбор объектов автоматизации - разработка вариантов автоматизации - выбор рационального варианта Тема 2.
- 3. ОБЪЕКТЫ АВТОМАТИЗАЦИИ (метод выбора) Тема 2. «Порядок выбора объектов автоматизации»
- 4. Под объектом автоматизации понимают машину, систему машин, рабочее место специалиста, производственный процесс или его составную часть,
- 5. ЦЕЛИ АВТОМАТИЗАЦИИ сокращение трудовых затрат улучшение условий производства повышение объёмов выпуска повышение качества продукции Тема 2.
- 6. ОБЪЕКТЫ АВТОМАТИЗАЦИИ РАЗЛИЧАЮТ (КЛАССИФИЦИРУЮТ) по виду производства Тема 2. «Порядок выбора объектов автоматизации» по типу технологического
- 7. по степени совмещенности технологического и транспортного процессов механические (сортировка, резка, ковка, транспортировка, механическая обработка) тепловые (охлаждение,
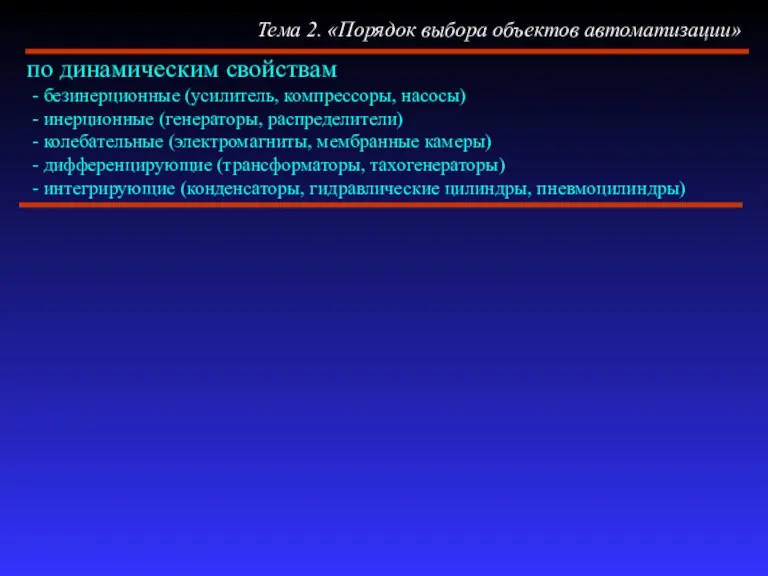
- 8. Тема 2. «Порядок выбора объектов автоматизации» безинерционные (усилитель, компрессоры, насосы) инерционные (генераторы, распределители) колебательные (электромагниты, мембранные
- 9. ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ ОБЪЕКТЫ С ПОСТУПАТЕЛЬНЫМ ВИДОМ ДВИЖЕНИЯ Тема 2. «Порядок выбора объектов автоматизации» m dv
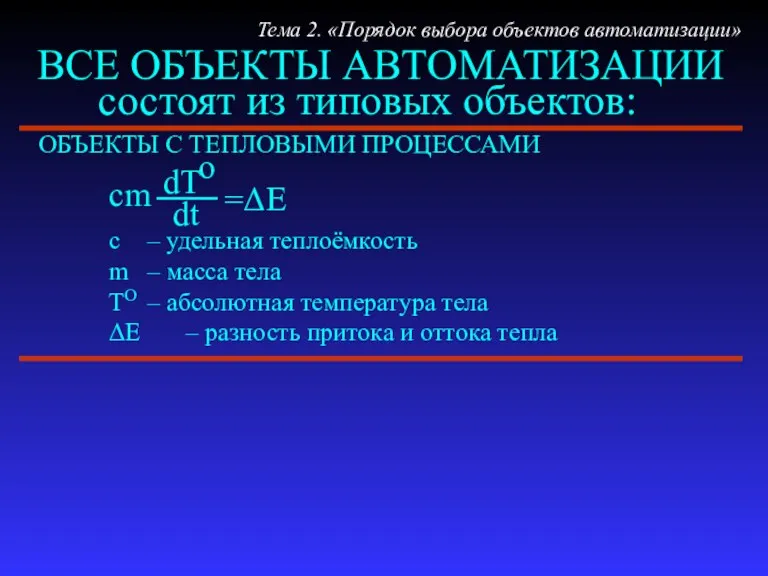
- 10. ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ ОБЪЕКТЫ С ТЕПЛОВЫМИ ПРОЦЕССАМИ Тема 2. «Порядок выбора объектов автоматизации» состоят из типовых
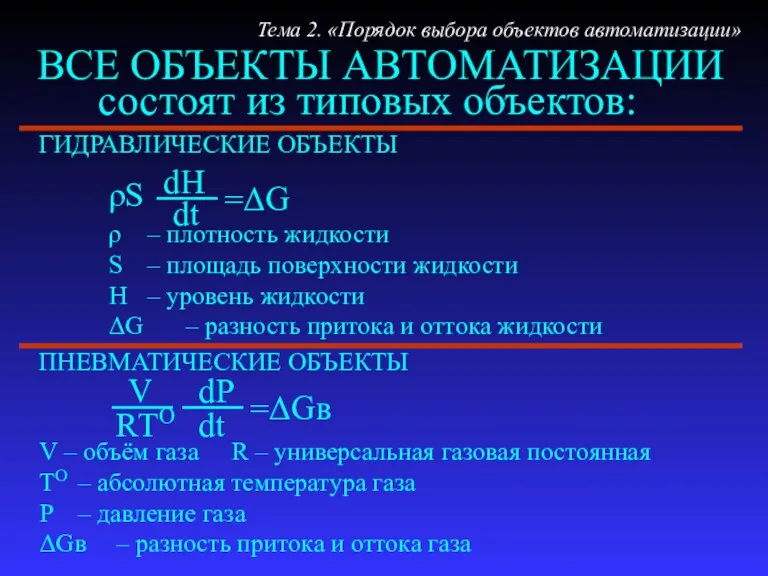
- 11. R V ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ ГИДРАВЛИЧЕСКИЕ ОБЪЕКТЫ Тема 2. «Порядок выбора объектов автоматизации» состоят из типовых
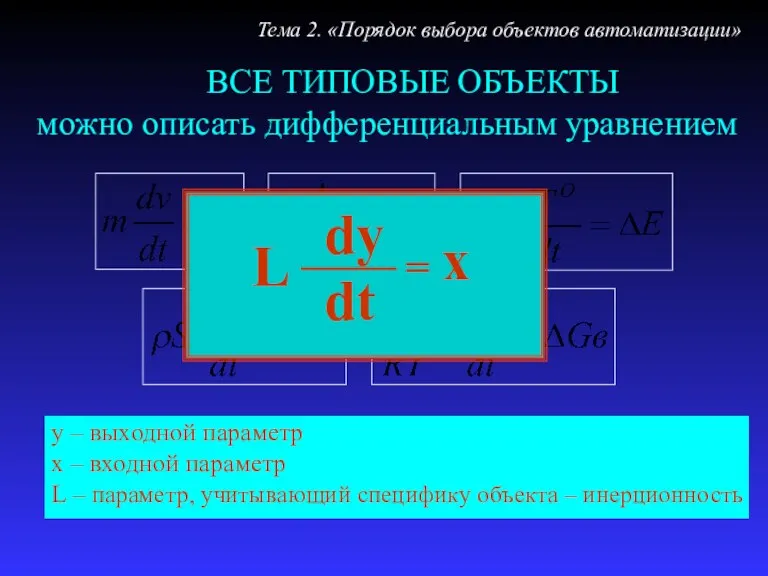
- 12. ВСЕ ТИПОВЫЕ ОБЪЕКТЫ Тема 2. «Порядок выбора объектов автоматизации» можно описать дифференциальным уравнением L dt =
- 13. ВЫБОР ОБЪЕКТОВ АВТОМАТИЗАЦИИ осуществляется в два этапа Тема 2. «Порядок выбора объектов автоматизации» I ЭТАП -
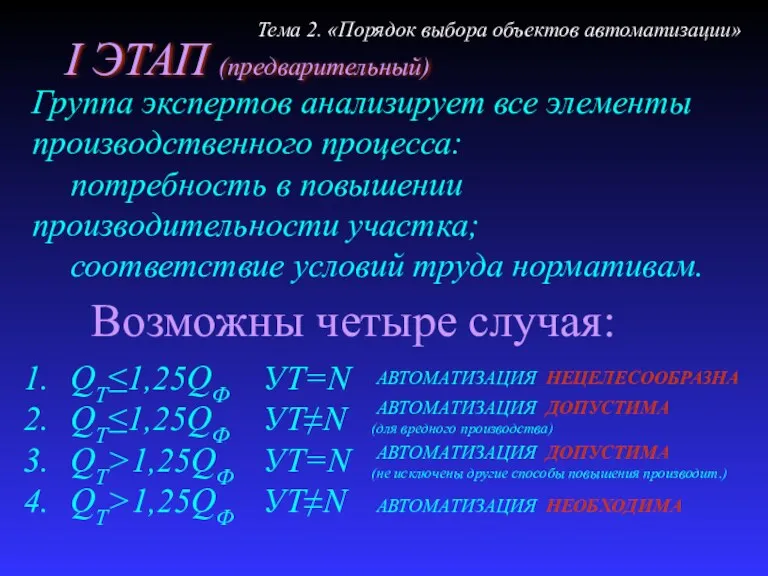
- 14. I ЭТАП (предварительный) Группа экспертов анализирует все элементы производственного процесса: потребность в повышении производительности участка; соответствие
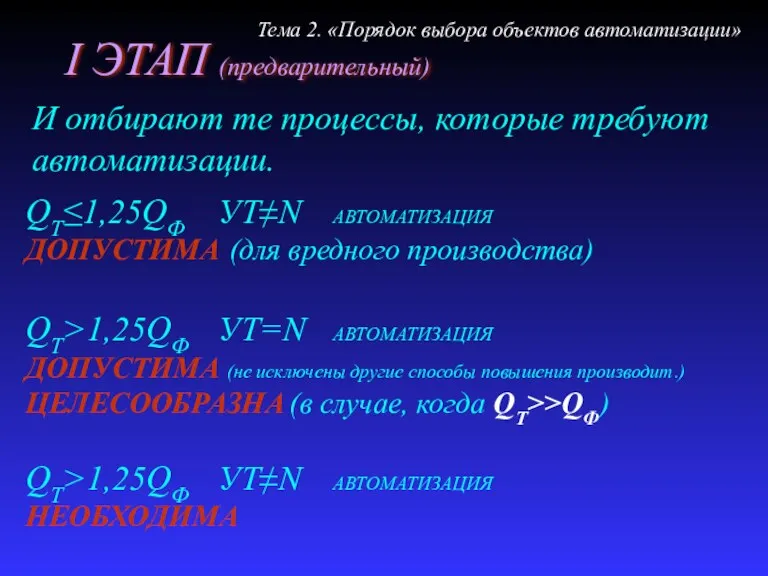
- 15. I ЭТАП (предварительный) Тема 2. «Порядок выбора объектов автоматизации» QT≤1,25QФ УТ≠N АВТОМАТИЗАЦИЯ ДОПУСТИМА (для вредного производства)
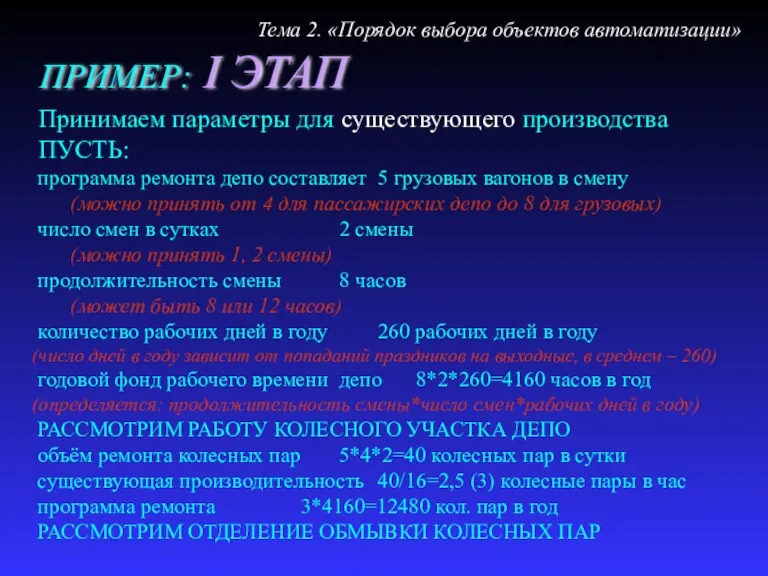
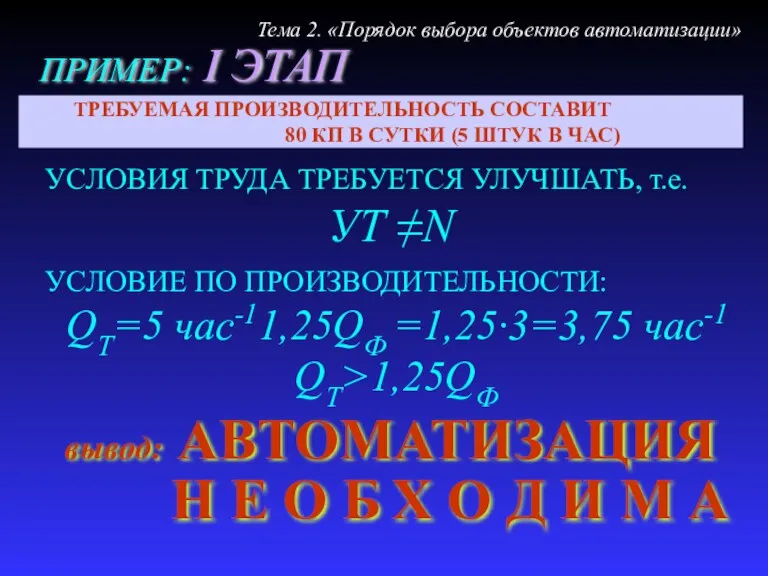
- 16. ПРИМЕР: I ЭТАП Тема 2. «Порядок выбора объектов автоматизации» Принимаем параметры для существующего производства ПУСТЬ: программа
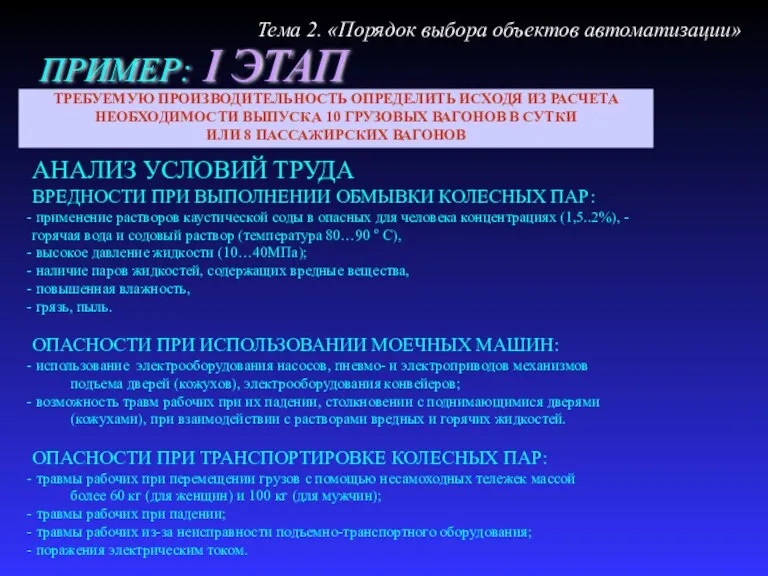
- 17. ПРИМЕР: I ЭТАП Тема 2. «Порядок выбора объектов автоматизации» АНАЛИЗ УСЛОВИЙ ТРУДА ВРЕДНОСТИ ПРИ ВЫПОЛНЕНИИ ОБМЫВКИ
- 18. ПРИМЕР: I ЭТАП Тема 2. «Порядок выбора объектов автоматизации» УСЛОВИЯ ТРУДА ТРЕБУЕТСЯ УЛУЧШАТЬ, т.е. УТ ≠N
- 19. определяют оптимальный уровень автоматизации Каопт комплект автоматических машин , исходя из условий II ЭТАП (окончательный) Для
- 20. ОПТИМАЛЬНЫЙ УРОВЕНЬ АВТОМАТИЗАЦИИ Тема 2. «Порядок выбора объектов автоматизации» ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО УРОВНЯ АВТОМАТИЗАЦИИ НЕОБХОДИМО СОСТАВИТЬ
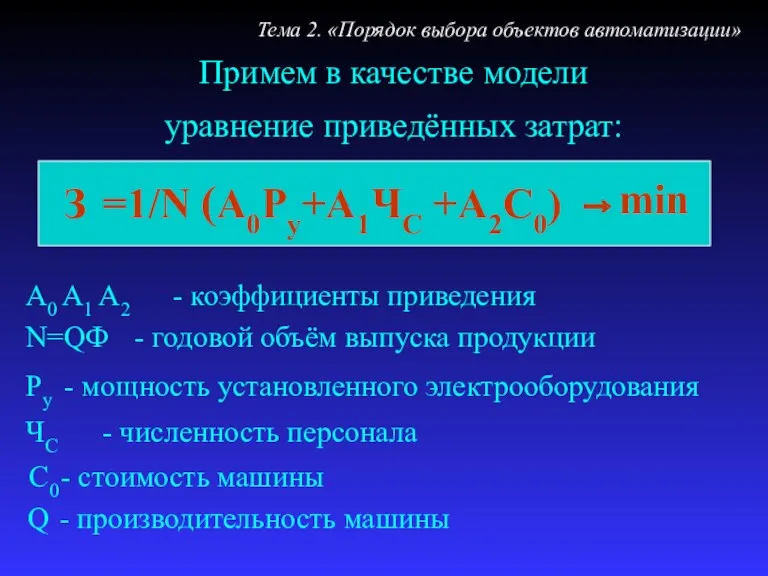
- 21. Примем в качестве модели уравнение приведённых затрат: Тема 2. «Порядок выбора объектов автоматизации» =1/N (A0Py+A1ЧС +A2С0)
- 22. Ф – годовой фонд времени работы машины, час. Коэффициенты приближенно: Тема 2. «Порядок выбора объектов автоматизации»
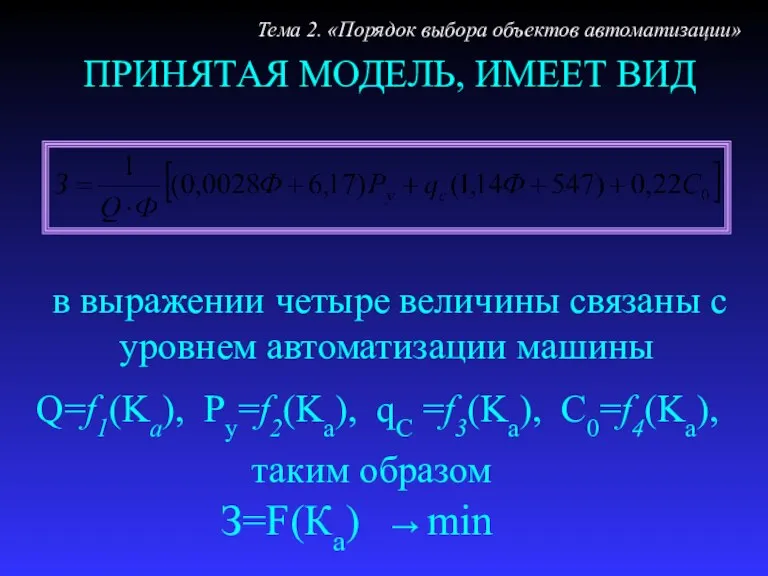
- 23. ПРИНЯТАЯ МОДЕЛЬ, ИМЕЕТ ВИД Тема 2. «Порядок выбора объектов автоматизации» Q=f1(Ka), Ру=f2(Ka), qС =f3(Ka), С0=f4(Ka), в
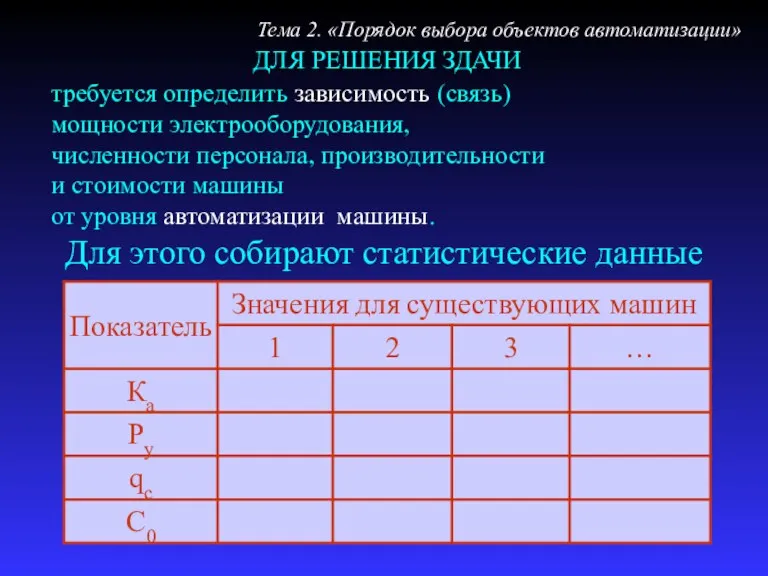
- 24. ДЛЯ РЕШЕНИЯ ЗДАЧИ Тема 2. «Порядок выбора объектов автоматизации» требуется определить зависимость (связь) мощности электрооборудования, численности
- 25. ПРИМЕР определения связи (зависимости) мощности и уровня автоматизации Тема 2. «Порядок выбора объектов автоматизации» 1. Зададим
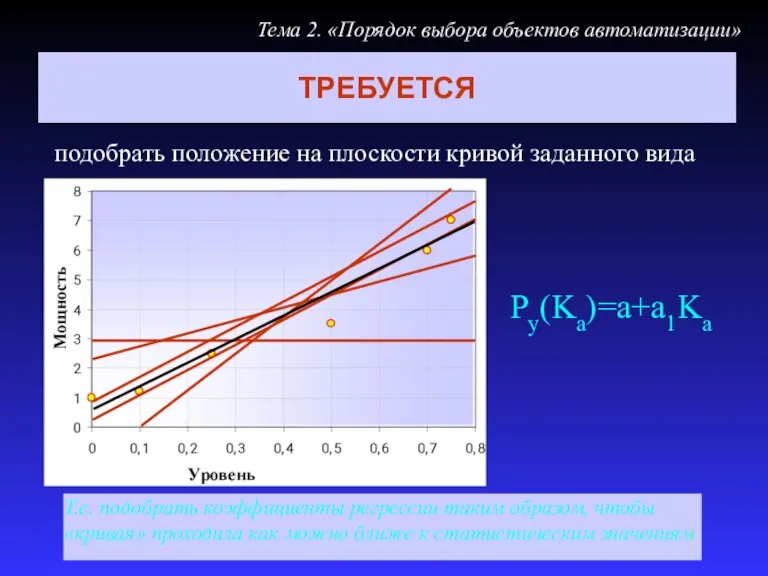
- 26. Тема 2. «Порядок выбора объектов автоматизации» подобрать положение на плоскости кривой заданного вида Т.е. подобрать коэффициенты
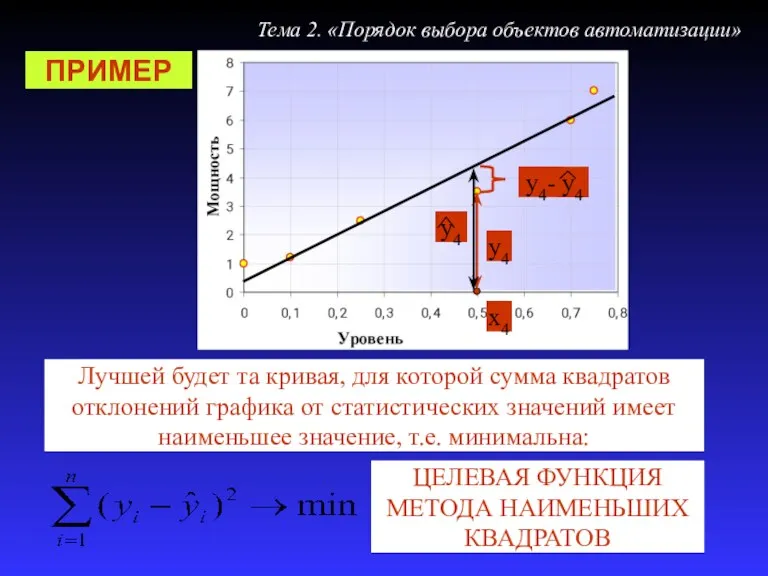
- 27. Тема 2. «Порядок выбора объектов автоматизации» Лучшей будет та кривая, для которой сумма квадратов отклонений графика
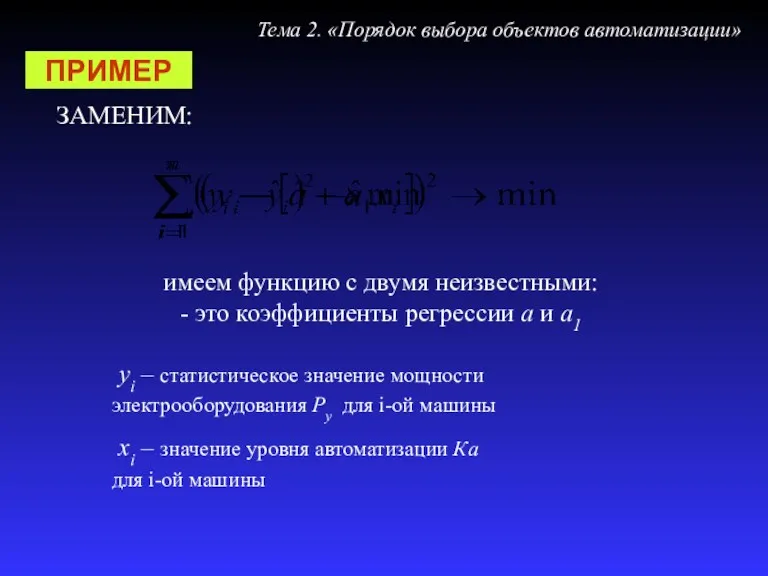
- 28. Тема 2. «Порядок выбора объектов автоматизации» ПРИМЕР ЗАМЕНИМ: имеем функцию с двумя неизвестными: - это коэффициенты
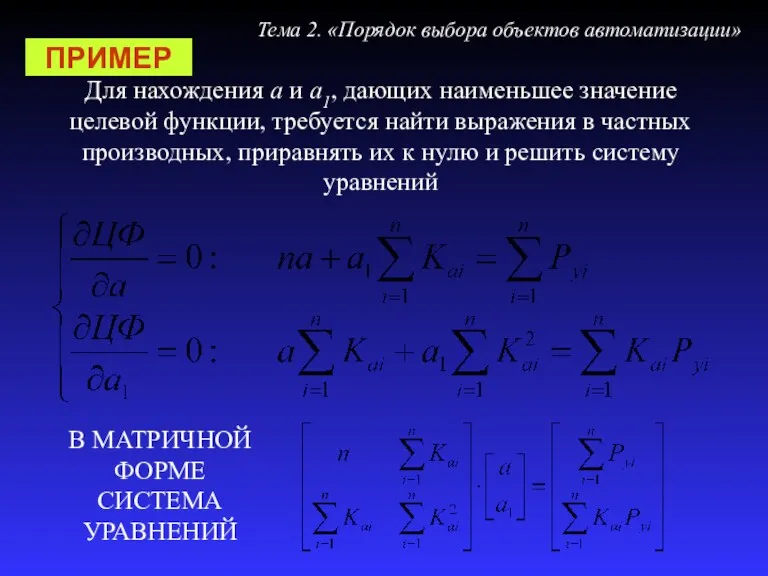
- 29. Тема 2. «Порядок выбора объектов автоматизации» ПРИМЕР Для нахождения а и а1, дающих наименьшее значение целевой
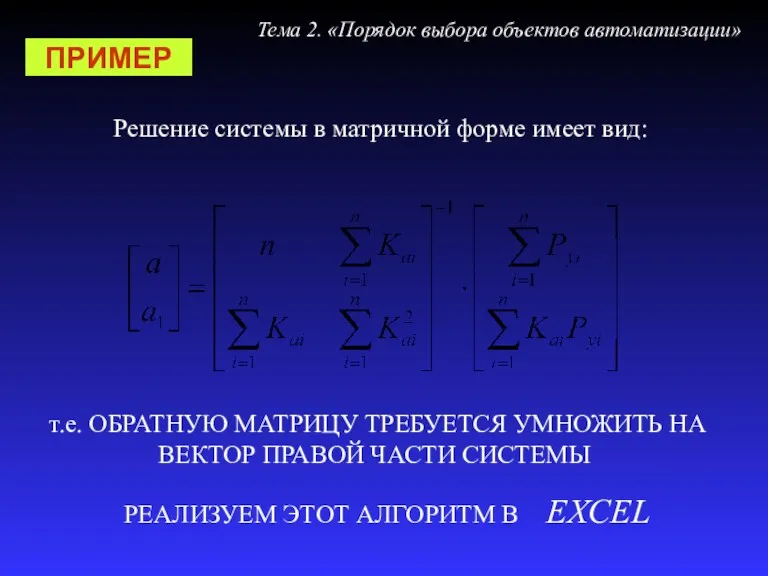
- 30. Тема 2. «Порядок выбора объектов автоматизации» ПРИМЕР Решение системы в матричной форме имеет вид: т.е. ОБРАТНУЮ
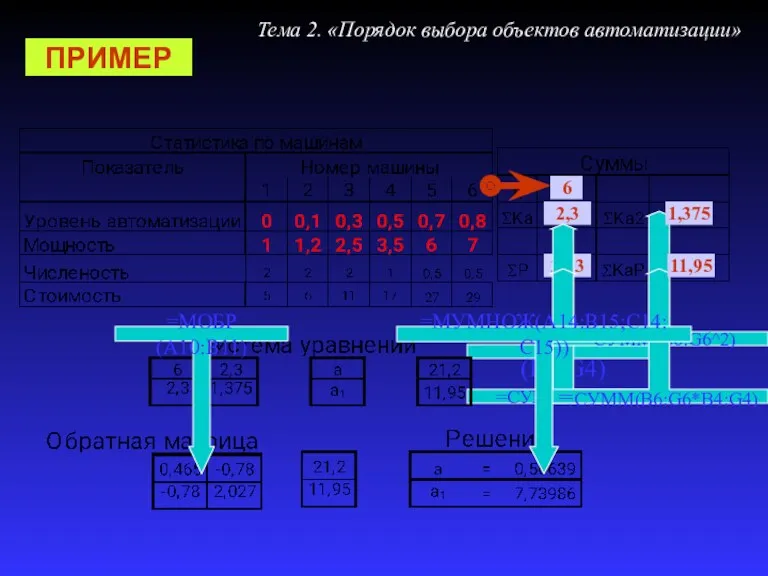
- 31. Тема 2. «Порядок выбора объектов автоматизации» ПРИМЕР 6 2,3 21,3 =СУММ(B4:G4) =СУММ(B6:G6) =СУММ(B6:G6^2) 1,375 =СУММ(B6:G6*B4:G4) 11,95
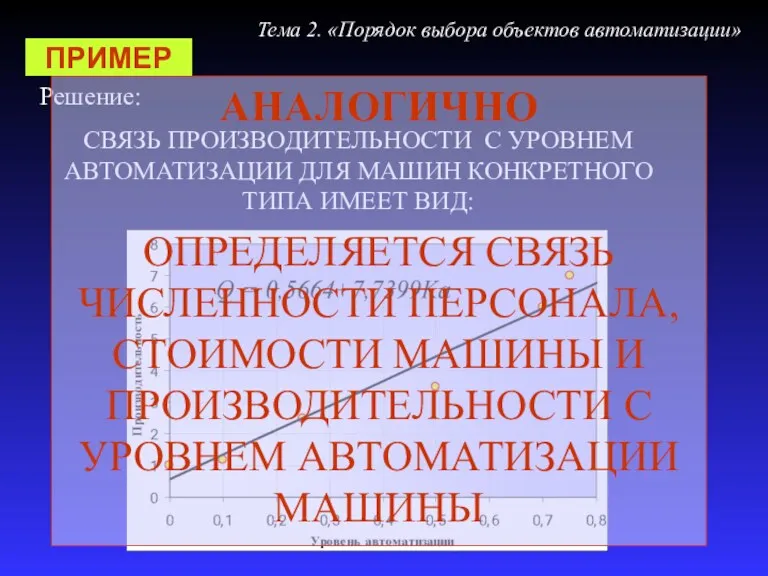
- 32. Тема 2. «Порядок выбора объектов автоматизации» ПРИМЕР Решение: СВЯЗЬ ПРОИЗВОДИТЕЛЬНОСТИ С УРОВНЕМ АВТОМАТИЗАЦИИ ДЛЯ МАШИН КОНКРЕТНОГО
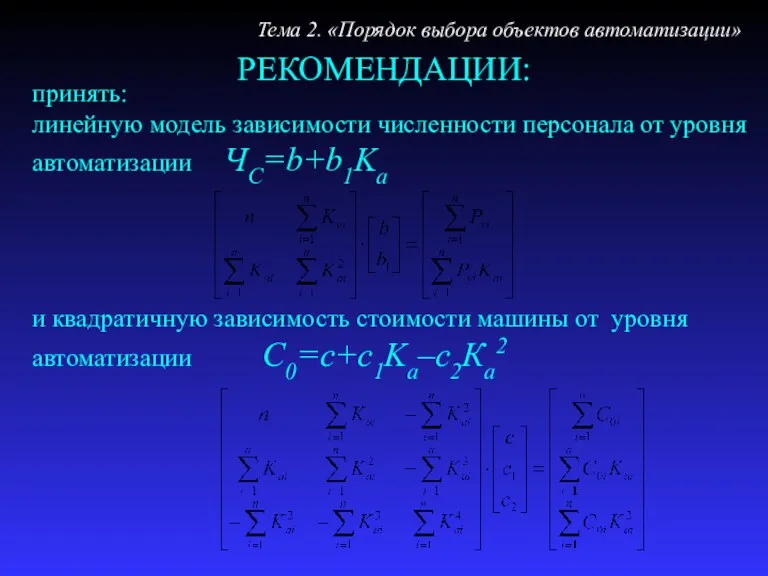
- 33. РЕКОМЕНДАЦИИ: Тема 2. «Порядок выбора объектов автоматизации» принять: линейную модель зависимости численности персонала от уровня автоматизации
- 34. Правила проектирования машин и их математические модели Тема 2. «Порядок выбора объектов автоматизации» В основе проектирования
- 35. ПРАВИЛА ПОСТОРОЕНИЯ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ Тема 2. «Порядок выбора объектов автоматизации» При построении математических моделей полагают, что
- 36. Создание конструктивной схемы Тема 2. «Порядок выбора объектов автоматизации» Структурная схема – графическое изображение машины в
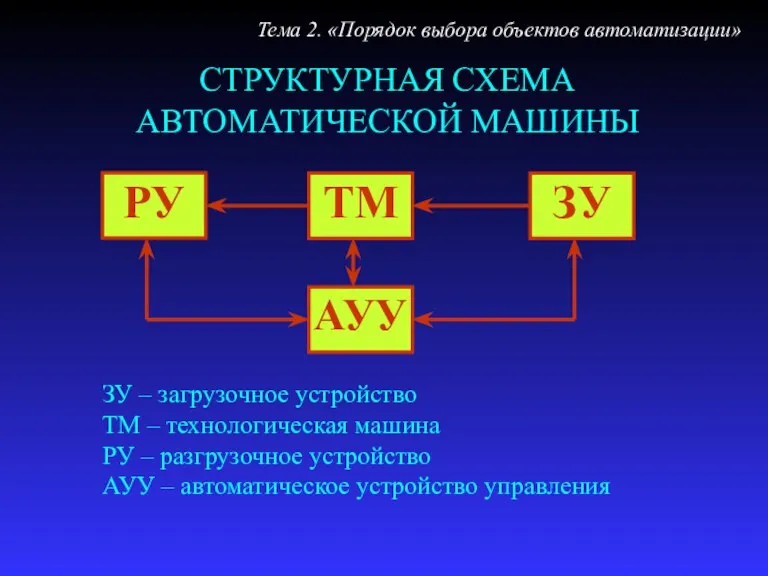
- 37. СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОЙ МАШИНЫ Тема 2. «Порядок выбора объектов автоматизации» ЗУ – загрузочное устройство ТМ –
- 38. ПРИМЕР: КОНСТРУКТИВНОЙ СХЕМЫ АВТОМАТИЧЕСКОЙ МОЕЧНОЙ МАШИНЫ Тема 2. «Порядок выбора объектов автоматизации» ТМ РУ ЗУ
- 40. Скачать презентацию
Порядок автоматизации:
- выбор объектов автоматизации
- разработка вариантов автоматизации
- выбор рационального варианта
Тема
Порядок автоматизации:
- выбор объектов автоматизации
- разработка вариантов автоматизации
- выбор рационального варианта
Тема
ОБЪЕКТЫ
АВТОМАТИЗАЦИИ
(метод выбора)
Тема 2. «Порядок выбора объектов автоматизации»
ОБЪЕКТЫ
АВТОМАТИЗАЦИИ
(метод выбора)
Тема 2. «Порядок выбора объектов автоматизации»
Под объектом автоматизации понимают
машину,
систему машин,
рабочее место специалиста,
производственный процесс или
Под объектом автоматизации понимают
машину,
систему машин,
рабочее место специалиста,
производственный процесс или
ЦЕЛИ АВТОМАТИЗАЦИИ
сокращение трудовых затрат
улучшение условий производства
повышение объёмов выпуска
ЦЕЛИ АВТОМАТИЗАЦИИ
сокращение трудовых затрат
улучшение условий производства
повышение объёмов выпуска
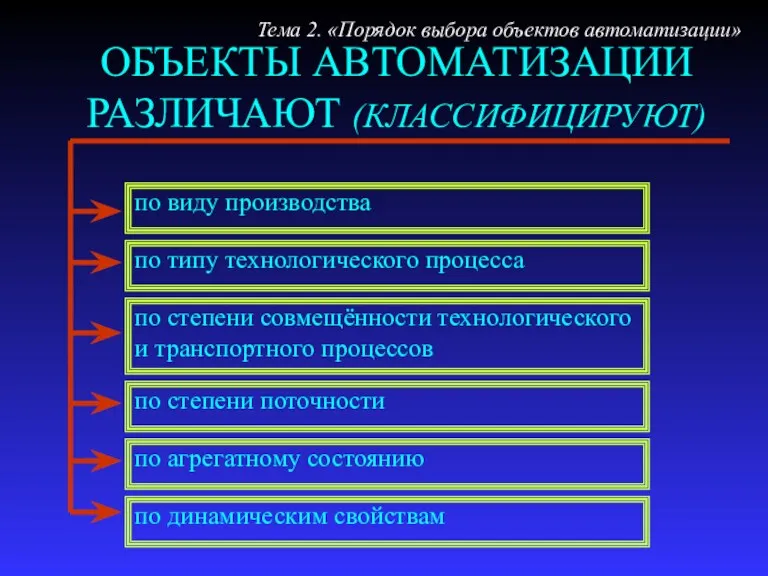
ОБЪЕКТЫ АВТОМАТИЗАЦИИ РАЗЛИЧАЮТ (КЛАССИФИЦИРУЮТ)
по виду производства
Тема 2. «Порядок выбора объектов
ОБЪЕКТЫ АВТОМАТИЗАЦИИ РАЗЛИЧАЮТ (КЛАССИФИЦИРУЮТ)
по виду производства
Тема 2. «Порядок выбора объектов
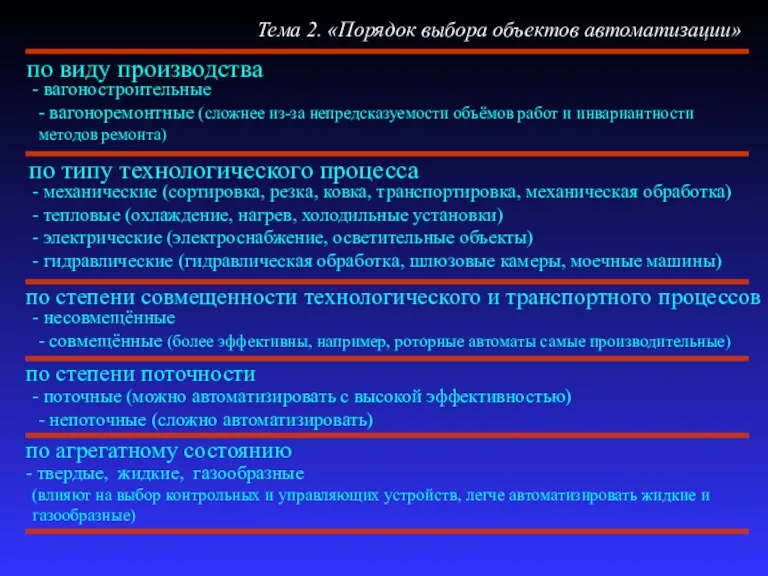
по степени совмещенности технологического и транспортного процессов
механические (сортировка, резка, ковка,
по степени совмещенности технологического и транспортного процессов
механические (сортировка, резка, ковка,
Тема 2. «Порядок выбора объектов автоматизации»
безинерционные (усилитель, компрессоры, насосы)
инерционные
Тема 2. «Порядок выбора объектов автоматизации»
безинерционные (усилитель, компрессоры, насосы)
инерционные
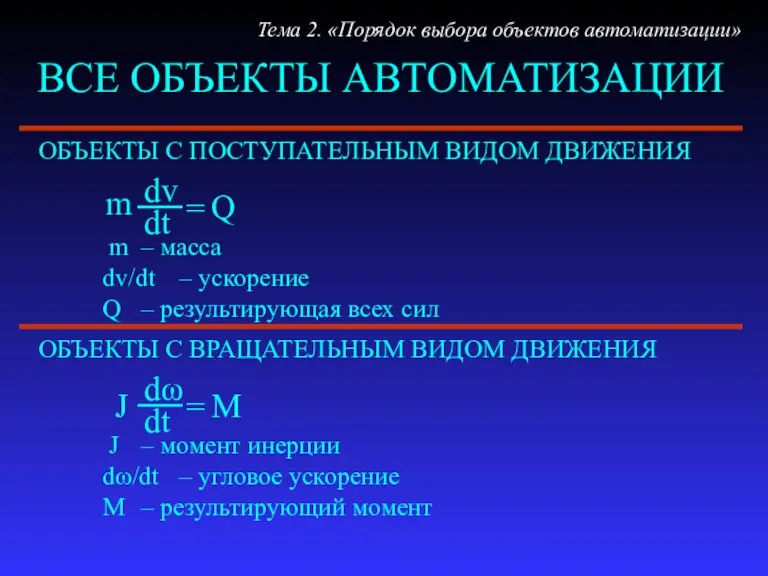
ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ОБЪЕКТЫ С ПОСТУПАТЕЛЬНЫМ ВИДОМ ДВИЖЕНИЯ
Тема 2. «Порядок выбора
ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ОБЪЕКТЫ С ПОСТУПАТЕЛЬНЫМ ВИДОМ ДВИЖЕНИЯ
Тема 2. «Порядок выбора
ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ОБЪЕКТЫ С ТЕПЛОВЫМИ ПРОЦЕССАМИ
Тема 2. «Порядок выбора объектов
ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ОБЪЕКТЫ С ТЕПЛОВЫМИ ПРОЦЕССАМИ
Тема 2. «Порядок выбора объектов
R
V
ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ГИДРАВЛИЧЕСКИЕ ОБЪЕКТЫ
Тема 2. «Порядок выбора объектов
R
V
ВСЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ
ГИДРАВЛИЧЕСКИЕ ОБЪЕКТЫ
Тема 2. «Порядок выбора объектов
ВСЕ ТИПОВЫЕ ОБЪЕКТЫ
Тема 2. «Порядок выбора объектов автоматизации»
можно описать дифференциальным
ВСЕ ТИПОВЫЕ ОБЪЕКТЫ
Тема 2. «Порядок выбора объектов автоматизации»
можно описать дифференциальным
ВЫБОР ОБЪЕКТОВ АВТОМАТИЗАЦИИ
осуществляется в два этапа
Тема 2. «Порядок выбора объектов автоматизации»
I
ВЫБОР ОБЪЕКТОВ АВТОМАТИЗАЦИИ
осуществляется в два этапа
Тема 2. «Порядок выбора объектов автоматизации»
I
I ЭТАП (предварительный)
Группа экспертов анализирует все элементы производственного процесса:
потребность в
I ЭТАП (предварительный)
Группа экспертов анализирует все элементы производственного процесса:
потребность в
I ЭТАП (предварительный)
Тема 2. «Порядок выбора объектов автоматизации»
QT≤1,25QФ УТ≠N АВТОМАТИЗАЦИЯ
ДОПУСТИМА (для вредного
I ЭТАП (предварительный)
Тема 2. «Порядок выбора объектов автоматизации»
QT≤1,25QФ УТ≠N АВТОМАТИЗАЦИЯ
ДОПУСТИМА (для вредного
ПРИМЕР: I ЭТАП
Тема 2. «Порядок выбора объектов автоматизации»
Принимаем параметры для
ПРИМЕР: I ЭТАП
Тема 2. «Порядок выбора объектов автоматизации»
Принимаем параметры для
ПРИМЕР: I ЭТАП
Тема 2. «Порядок выбора объектов автоматизации»
АНАЛИЗ УСЛОВИЙ ТРУДА
ВРЕДНОСТИ ПРИ
ПРИМЕР: I ЭТАП
Тема 2. «Порядок выбора объектов автоматизации»
АНАЛИЗ УСЛОВИЙ ТРУДА
ВРЕДНОСТИ ПРИ
ПРИМЕР: I ЭТАП
Тема 2. «Порядок выбора объектов автоматизации»
УСЛОВИЯ ТРУДА ТРЕБУЕТСЯ УЛУЧШАТЬ,
ПРИМЕР: I ЭТАП
Тема 2. «Порядок выбора объектов автоматизации»
УСЛОВИЯ ТРУДА ТРЕБУЕТСЯ УЛУЧШАТЬ,
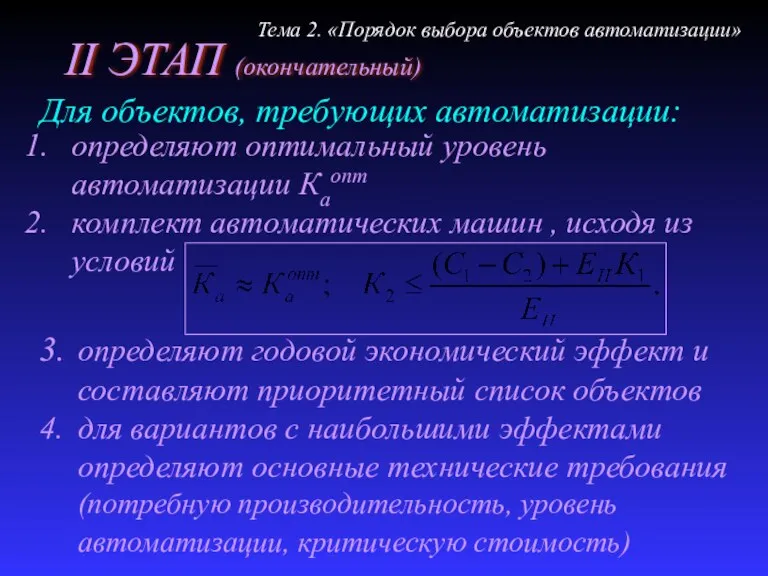
определяют оптимальный уровень автоматизации Каопт
комплект автоматических машин , исходя из условий
II
определяют оптимальный уровень автоматизации Каопт
комплект автоматических машин , исходя из условий
II
ОПТИМАЛЬНЫЙ УРОВЕНЬ АВТОМАТИЗАЦИИ
Тема 2. «Порядок выбора объектов автоматизации»
ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО
ОПТИМАЛЬНЫЙ УРОВЕНЬ АВТОМАТИЗАЦИИ
Тема 2. «Порядок выбора объектов автоматизации»
ДЛЯ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО
Примем в качестве модели
уравнение приведённых затрат:
Тема 2. «Порядок выбора
Примем в качестве модели
уравнение приведённых затрат:
Тема 2. «Порядок выбора
Ф – годовой фонд времени работы машины, час.
Коэффициенты приближенно:
Тема 2.
Ф – годовой фонд времени работы машины, час.
Коэффициенты приближенно:
Тема 2.
ПРИНЯТАЯ МОДЕЛЬ, ИМЕЕТ ВИД
Тема 2. «Порядок выбора объектов автоматизации»
Q=f1(Ka), Ру=f2(Ka),
ПРИНЯТАЯ МОДЕЛЬ, ИМЕЕТ ВИД
Тема 2. «Порядок выбора объектов автоматизации»
Q=f1(Ka), Ру=f2(Ka),
ДЛЯ РЕШЕНИЯ ЗДАЧИ
Тема 2. «Порядок выбора объектов автоматизации»
требуется определить
ДЛЯ РЕШЕНИЯ ЗДАЧИ
Тема 2. «Порядок выбора объектов автоматизации»
требуется определить
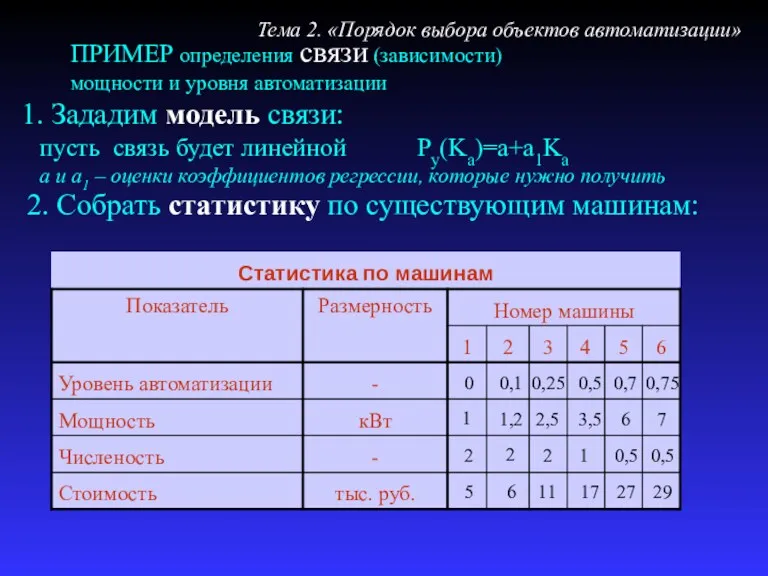
ПРИМЕР определения связи (зависимости)
мощности и уровня автоматизации
Тема 2. «Порядок выбора
ПРИМЕР определения связи (зависимости)
мощности и уровня автоматизации
Тема 2. «Порядок выбора
Тема 2. «Порядок выбора объектов автоматизации»
подобрать положение на плоскости кривой заданного
Тема 2. «Порядок выбора объектов автоматизации»
подобрать положение на плоскости кривой заданного
Тема 2. «Порядок выбора объектов автоматизации»
Лучшей будет та кривая, для которой
Тема 2. «Порядок выбора объектов автоматизации»
Лучшей будет та кривая, для которой
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
ЗАМЕНИМ:
имеем функцию с двумя неизвестными:
- это
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
ЗАМЕНИМ:
имеем функцию с двумя неизвестными: - это
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
Для нахождения а и а1, дающих
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
Для нахождения а и а1, дающих
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
Решение системы в матричной форме имеет
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
Решение системы в матричной форме имеет
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
6
2,3
21,3
=СУММ(B4:G4)
=СУММ(B6:G6)
=СУММ(B6:G6^2)
1,375
=СУММ(B6:G6*B4:G4)
11,95
=МОБР(А10:B11)
=МУМНОЖ(А14:B15;С14:С15))
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
6
2,3
21,3
=СУММ(B4:G4)
=СУММ(B6:G6)
=СУММ(B6:G6^2)
1,375
=СУММ(B6:G6*B4:G4)
11,95
=МОБР(А10:B11)
=МУМНОЖ(А14:B15;С14:С15))
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
Решение:
СВЯЗЬ ПРОИЗВОДИТЕЛЬНОСТИ С УРОВНЕМ АВТОМАТИЗАЦИИ ДЛЯ
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР
Решение:
СВЯЗЬ ПРОИЗВОДИТЕЛЬНОСТИ С УРОВНЕМ АВТОМАТИЗАЦИИ ДЛЯ
РЕКОМЕНДАЦИИ:
Тема 2. «Порядок выбора объектов автоматизации»
принять:
линейную модель зависимости численности персонала от
РЕКОМЕНДАЦИИ:
Тема 2. «Порядок выбора объектов автоматизации»
принять:
линейную модель зависимости численности персонала от
Правила проектирования машин и их математические модели
Тема 2. «Порядок выбора объектов
Правила проектирования машин и их математические модели
Тема 2. «Порядок выбора объектов
ПРАВИЛА ПОСТОРОЕНИЯ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
Тема 2. «Порядок выбора объектов автоматизации»
При построении математических
ПРАВИЛА ПОСТОРОЕНИЯ
МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ
Тема 2. «Порядок выбора объектов автоматизации»
При построении математических
Создание конструктивной схемы
Тема 2. «Порядок выбора объектов автоматизации»
Структурная схема –
Создание конструктивной схемы
Тема 2. «Порядок выбора объектов автоматизации»
Структурная схема –
СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОЙ МАШИНЫ
Тема 2. «Порядок выбора объектов автоматизации»
ЗУ – загрузочное
СТРУКТУРНАЯ СХЕМА АВТОМАТИЧЕСКОЙ МАШИНЫ
Тема 2. «Порядок выбора объектов автоматизации»
ЗУ – загрузочное
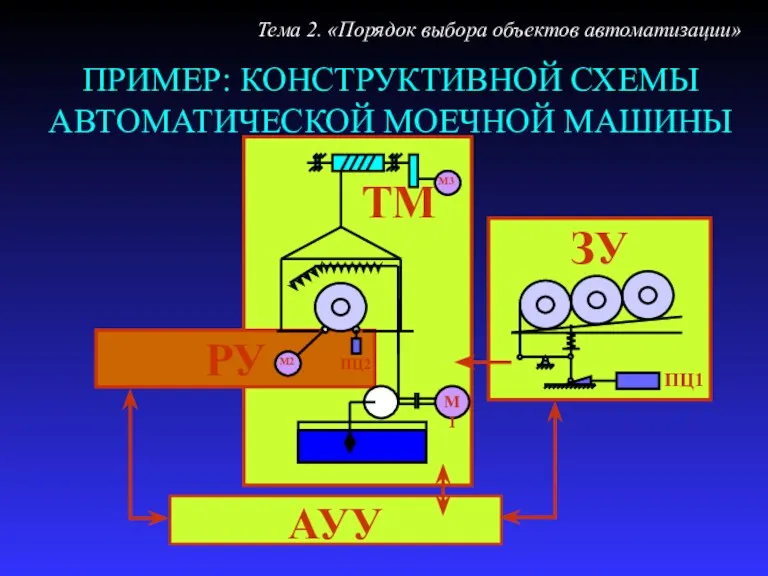
ПРИМЕР: КОНСТРУКТИВНОЙ СХЕМЫ АВТОМАТИЧЕСКОЙ МОЕЧНОЙ МАШИНЫ
Тема 2. «Порядок выбора объектов автоматизации»
ПРИМЕР: КОНСТРУКТИВНОЙ СХЕМЫ АВТОМАТИЧЕСКОЙ МОЕЧНОЙ МАШИНЫ
Тема 2. «Порядок выбора объектов автоматизации»
 Гидравлика. Физические свойства жидкостей
Гидравлика. Физические свойства жидкостей Жоғары жиілікті сыйымдылықты разрядтың
Жоғары жиілікті сыйымдылықты разрядтың Электронная система зажигания
Электронная система зажигания Переключательные схемы
Переключательные схемы Кинематика. Сложное движение точки. Сложное движение твердого тела
Кинематика. Сложное движение точки. Сложное движение твердого тела Действие жидкости и газа на погруженное в них тело
Действие жидкости и газа на погруженное в них тело Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Подшипники скольжения
Подшипники скольжения Самоиндукция. Явление самоиндукции
Самоиндукция. Явление самоиндукции Напряженность электрического поля. Принцип суперпозиции полей
Напряженность электрического поля. Принцип суперпозиции полей Путь к известности
Путь к известности Звуковой резонанс
Звуковой резонанс Строение атома
Строение атома Зеркало
Зеркало Основы технических знаний. Физические основы работы полупроводниковых приборов. Лекция №4
Основы технических знаний. Физические основы работы полупроводниковых приборов. Лекция №4 Физические находки в историческом ракурсе
Физические находки в историческом ракурсе Электр тізбектеріндегі өтпелі үрдістер
Электр тізбектеріндегі өтпелі үрдістер Презентация по физикеРадиация - проблемы и перспективы
Презентация по физикеРадиация - проблемы и перспективы графики плавления и кристаллизации
графики плавления и кристаллизации Види і принципи роботи малих джерел електричного струму та їх утилізація
Види і принципи роботи малих джерел електричного струму та їх утилізація Химические реакторы. Гетерогенно-каталитические химические процессы. Лекция №12
Химические реакторы. Гетерогенно-каталитические химические процессы. Лекция №12 Электрические тали
Электрические тали Середня швидкість. Нерівномірний рух
Середня швидкість. Нерівномірний рух Электрический ток в жидкостях
Электрический ток в жидкостях Условия равновесия тел. Момент силы. Виды равновесия
Условия равновесия тел. Момент силы. Виды равновесия Мир физики
Мир физики Какие батарейки лучше
Какие батарейки лучше Измерение твердости материалов различными методами
Измерение твердости материалов различными методами