- Разработка стенда для динамических испытаний системы телеуправления в условиях помех

Содержание
- 2. Цели и задачи дипломной работы 2 Цель исследования: синтез системы телеуправления (СТУ) подвижного объекта и разработка
- 3. Патентно-информационный поиск по проблеме моделирования лабораторно-стендовых динамических испытаний системы телеуправления Рис. 1. Принципиальная схема стенда для
- 4. Рис. 2. Принципиальная схема стенда для полунатурного моделирования динамических испытаний оптико-электронных приборов. 1 – реостат 2,3
- 5. Постановка задачи анализа и синтеза системы телеуправления подвижного объекта 5
- 6. Расчет корректирующего фильтра для контура управления 6
- 8. Состав стенда для испытаний СТУ на динамику, точность и помехозащищенность Рис. 6. Функциональная схема стенда для
- 9. Cтенд для экспериментальной отработки СТУ Рис. 8. Имитация вывода объекта со сканирующим излучателем на линию прицеливания
- 10. Разработка блока зеркально-отклоняющих систем в составе стенда для испытаний СТУ Рис. 9. Принципиальная схема ЗОС: 1
- 11. Принципиальная электрическая схема ЭМП с датчиками угла Структурная схема ЭМП Проектирование ЗОС сводится к синтезу закона
- 12. Синтез управления зеркально-отклоняющей системы
- 13. СЕТЕВОЕ ПЛАНИРОВАНИЕ Картотека событий 11
- 15. Скачать презентацию
Цели и задачи дипломной работы 2
Цель исследования: синтез системы телеуправления (СТУ) подвижного
Цели и задачи дипломной работы 2
Цель исследования: синтез системы телеуправления (СТУ) подвижного
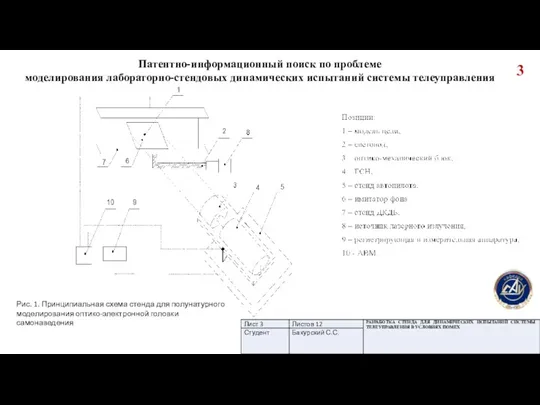
Патентно-информационный поиск по проблеме
моделирования лабораторно-стендовых динамических испытаний системы телеуправления
Рис.
Патентно-информационный поиск по проблеме
моделирования лабораторно-стендовых динамических испытаний системы телеуправления
Рис.
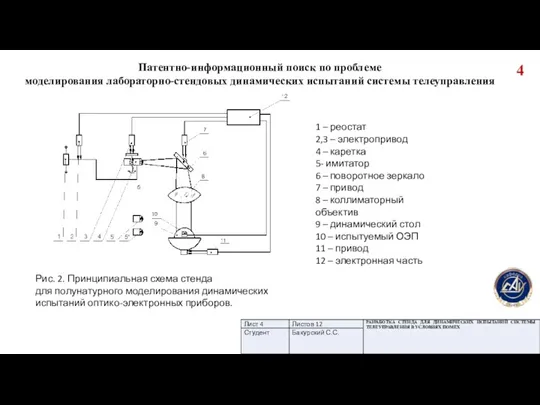
Рис. 2. Принципиальная схема стенда
для полунатурного моделирования динамических испытаний оптико-электронных приборов.
1
Рис. 2. Принципиальная схема стенда
для полунатурного моделирования динамических испытаний оптико-электронных приборов.
1
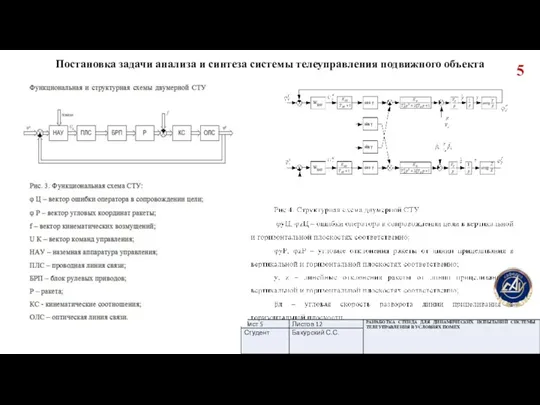
Постановка задачи анализа и синтеза системы телеуправления подвижного объекта
5
Постановка задачи анализа и синтеза системы телеуправления подвижного объекта
5
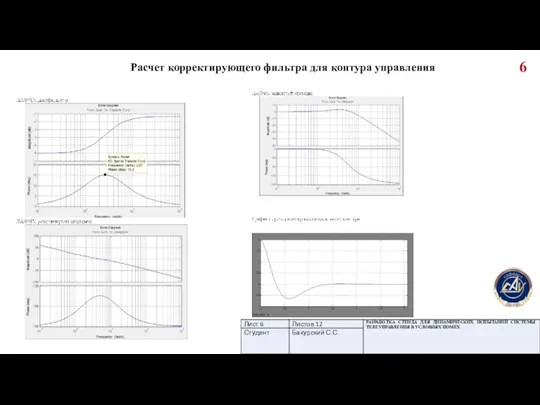
Расчет корректирующего фильтра для контура управления
6
Расчет корректирующего фильтра для контура управления
6

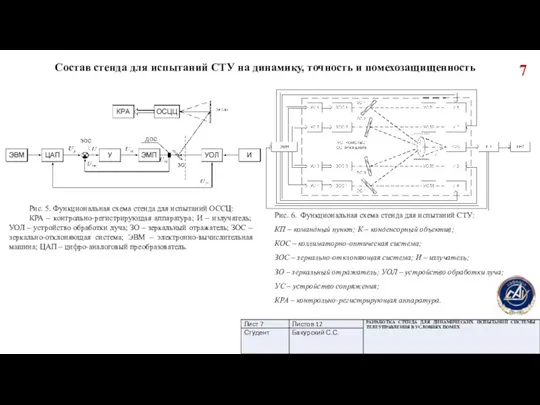
Состав стенда для испытаний СТУ на динамику, точность и помехозащищенность
Рис. 6.
Состав стенда для испытаний СТУ на динамику, точность и помехозащищенность
Рис. 6.

Cтенд для экспериментальной отработки СТУ
Рис. 8. Имитация вывода объекта со сканирующим
Cтенд для экспериментальной отработки СТУ
Рис. 8. Имитация вывода объекта со сканирующим
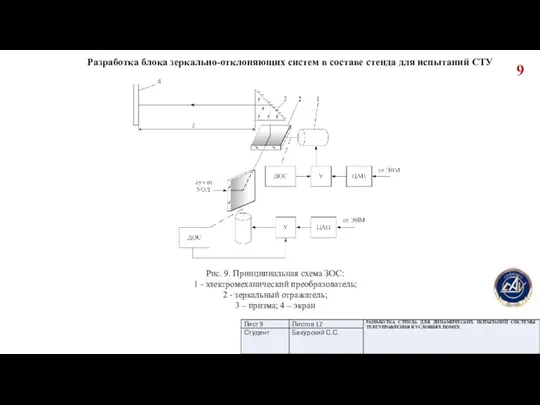
Разработка блока зеркально-отклоняющих систем в составе стенда для испытаний СТУ
Рис. 9.
Разработка блока зеркально-отклоняющих систем в составе стенда для испытаний СТУ
Рис. 9.

Принципиальная электрическая схема ЭМП
с датчиками угла
Структурная схема ЭМП
Проектирование ЗОС сводится
Принципиальная электрическая схема ЭМП
с датчиками угла
Структурная схема ЭМП
Проектирование ЗОС сводится
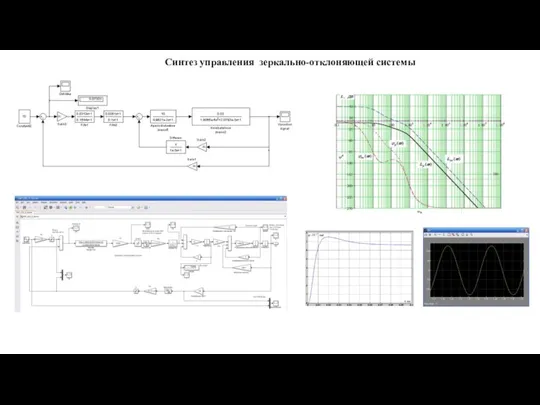
Синтез управления зеркально-отклоняющей системы
Синтез управления зеркально-отклоняющей системы
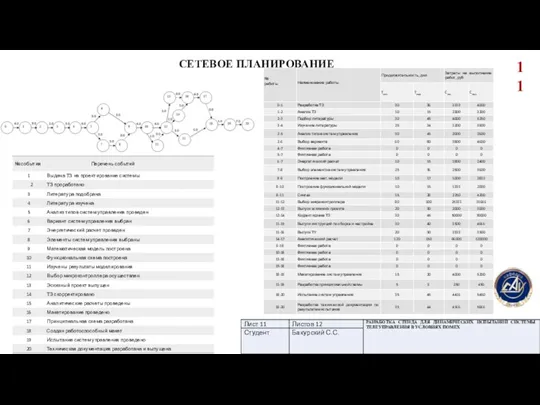
СЕТЕВОЕ ПЛАНИРОВАНИЕ
Картотека событий
11
СЕТЕВОЕ ПЛАНИРОВАНИЕ
Картотека событий
11
 Перший омнібус Д.Шилібіра
Перший омнібус Д.Шилібіра Система полного привода 4Motion Volkswagen. Трансмиссия
Система полного привода 4Motion Volkswagen. Трансмиссия Работа. Энергия. Механика
Работа. Энергия. Механика Физические основы механики
Физические основы механики Тепловые двигатели
Тепловые двигатели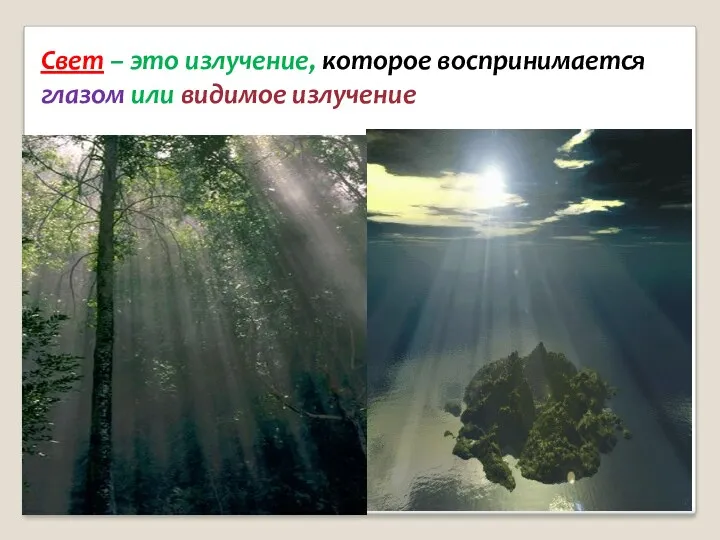 Источники света,Прямолинейное распространение света
Источники света,Прямолинейное распространение света Зубчатая передача
Зубчатая передача Сила трения. (7 класс)
Сила трения. (7 класс) Gas Dynamics (Introduction to Compressible Flow) Lecture 6a and 6b
Gas Dynamics (Introduction to Compressible Flow) Lecture 6a and 6b Основы трибофатики (трибофатика)
Основы трибофатики (трибофатика) Нанотехнологии и их применение
Нанотехнологии и их применение Проблемное обучение в преподавании физики
Проблемное обучение в преподавании физики Энтропия. Тепловые двигатели. (Лекция 10)
Энтропия. Тепловые двигатели. (Лекция 10) Система смазки и суфлирования
Система смазки и суфлирования Презентация. Обучение детей с учётом психофизиологии.
Презентация. Обучение детей с учётом психофизиологии. квантовая физика
квантовая физика Что изучает физика? Некоторые физические термины
Что изучает физика? Некоторые физические термины Урок физики в 8 классе Энергия топлива. Удельная теплота сгорания топлива
Урок физики в 8 классе Энергия топлива. Удельная теплота сгорания топлива методическая разработка урока
методическая разработка урока Internal combustion engine
Internal combustion engine презентация открытого урока: Строение атома
презентация открытого урока: Строение атома Физико-химические методы анализа
Физико-химические методы анализа Элементы машиноведения. Составные части машин
Элементы машиноведения. Составные части машин Проектирование зоны ТО-1 грузовых автомобилей с выделением шиномонтажного участка, технологический процесс ремонта колес
Проектирование зоны ТО-1 грузовых автомобилей с выделением шиномонтажного участка, технологический процесс ремонта колес Какие факторы влияют на испарение различных жидкостей
Какие факторы влияют на испарение различных жидкостей Радиационные методы контроля
Радиационные методы контроля Индикаторные и эффективные показатели ДВС. Тема 8
Индикаторные и эффективные показатели ДВС. Тема 8 игра инерция
игра инерция