- Силовой анализ механизмов

Содержание
- 2. Задачи силового анализа Основными задачами силового анализа являются: Определение реакций в кинематических парах. Знание этих реакций
- 3. Движущие силы и моменты движущих сил К движущим силам Fд или моментам движущих сил Мд относят
- 4. 2. Силы сопротивления и моменты сил сопротивления Силы сопротивления или моменты этих сил делятся на силы
- 5. К силам вредных сопротивлений относят силы трения в кинематических парах, силы аэродинамических сопротивлений и др., на
- 6. Примеры сил. У двигателя внутреннего сгорания движущей силой является давление расширяющегося газа на поршень. Силами сопротивления
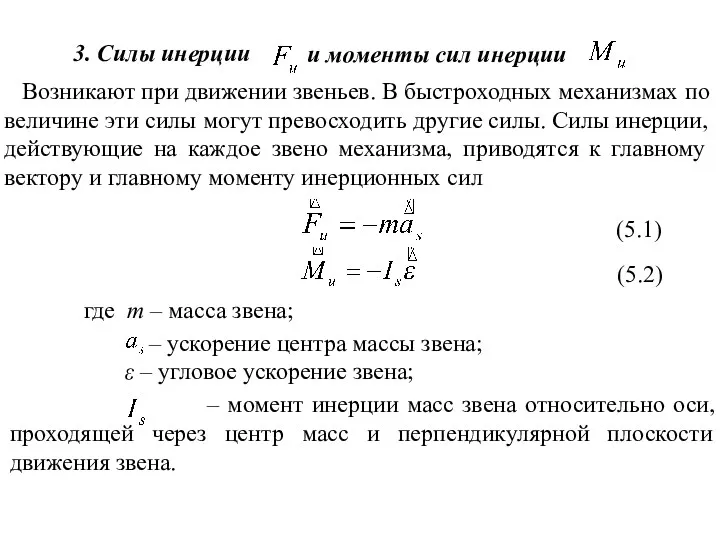
- 7. 3. Силы инерции и моменты сил инерции Возникают при движении звеньев. В быстроходных механизмах по величине
- 8. Направление этих сил и моментов обратно направлениям соответствующих ускорений, а их работа за время рабочего цикла
- 9. 4. Силы тяжести (веса) звеньев Прикладываются в центре масс звена направлены вертикально вниз. Вычисляются по формуле:
- 10. Реакция во вращательной кинематической паре Известна точка приложения реакции (рис. 5.3) и неизвестны направление и числовое
- 11. Реакция в поступательной кинематической паре Известно направление (рис.5.4) реакции , неизвестны её числовое значение и точка
- 12. Реакция в высшей кинематической паре В высшей кинематической паре плоского механизма (рис. 5.5) известны точка приложения
- 13. Принципы и последовательность силового расчета При силовом расчете механизма в число известных внешних сил, приложенных к
- 14. 2. Принцип освобождаемости от связей: не нарушая движения или покоя системы, можно отбрасывать отдельные связи и
- 15. Это совпадает с условиями, которым удовлетворяют структурные группы Ассура. Следовательно, группы Ассура являются статически определимыми системами.
- 16. Порядок кинетостатического расчета механизма 1. Отсоединить последнюю группу Ассура от механизма и приложить к ней известные
- 17. 3. Определить значение нормальной составляющей реакции во внешней поступательной кинематической паре. Для этого записать векторное уравнение
- 19. Силовой расчет рычажного шестизвенника Силовой расчет группы Аcсура вида ВВП
- 20. Дано: Массы звеньев: m4 = 2 кг, m5 = 5 кг. Момент инерции относительно оси, проходящей
- 21. 1). Определение сил тяжести звеньев: = н, 2). Определение сил инерции: = Силы инерции направлены в
- 22. 3). Определение момента инерции: Момент инерции направлен в противоположную сторону угловому ускорению έ4. Построим группу Ассура
- 23. Находим реакцию Rτ34. Длины плеч h1 и h2 измерены на расчетной схеме и умножены на масштаб.
- 24. Строим план сил. В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам . Начать построение необходимо
- 25. Таблица 1
- 26. 3. Определяем реакцию R54 . Составляем векторное уравнение равновесия всех сил, действующих звено 4: Выбираем масштаб
- 27. 4. Определяем место расположения реакции R65. Составим уравнение моментов всех сил, действующих на звено 5, относительно
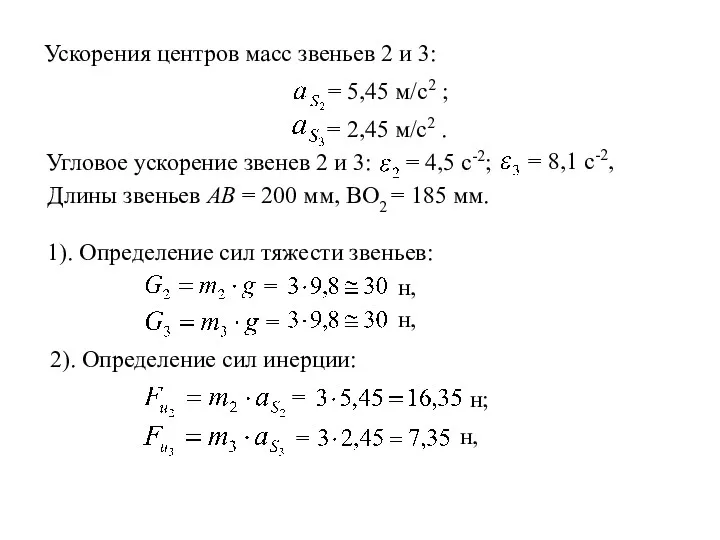
- 28. Ускорения центров масс звеньев 2 и 3: = 5,45 м/с2 ; Угловое ускорение звенев 2 и
- 29. Группа Ассура вида ВВП (масштаб 1:5)
- 30. Силы инерции направлены в противоположную сторону соответствующим ускорениям центров масс звеньев. 3). Определение моментов инерции: =
- 31. Определяем реакцию Rτ12. Составим уравнение моментов всех сил, действующих на звено 2, относительно точки В: Находим
- 32. Находим реакцию Rτ63. h1, h2, h3 и h4 измеряются на расчетной схеме и умножаются на масштаб.
- 33. Вычисляем величины отрезков, соответствующих векторам сил. Данные заносим в таблицу 2. Таблица 2
- 34. Строим план сил. В соответствии с векторным уравнением откладываем отрезки, соответствующие векторам . Остальные векторы можно
- 35. Группа Ассура ВВВ (масштаб 1:3) План сил для группы Ассура
- 37. Скачать презентацию
Задачи силового анализа
Основными задачами силового анализа являются:
Определение реакций в кинематических парах.
Задачи силового анализа
Основными задачами силового анализа являются:
Определение реакций в кинематических парах.
Движущие силы и моменты движущих сил
К движущим силам Fд или моментам
Движущие силы и моменты движущих сил
К движущим силам Fд или моментам
2. Силы сопротивления и моменты сил сопротивления
Силы сопротивления
или моменты
2. Силы сопротивления и моменты сил сопротивления
Силы сопротивления
или моменты
К силам вредных сопротивлений
относят силы трения в кинематических парах,
К силам вредных сопротивлений
относят силы трения в кинематических парах,
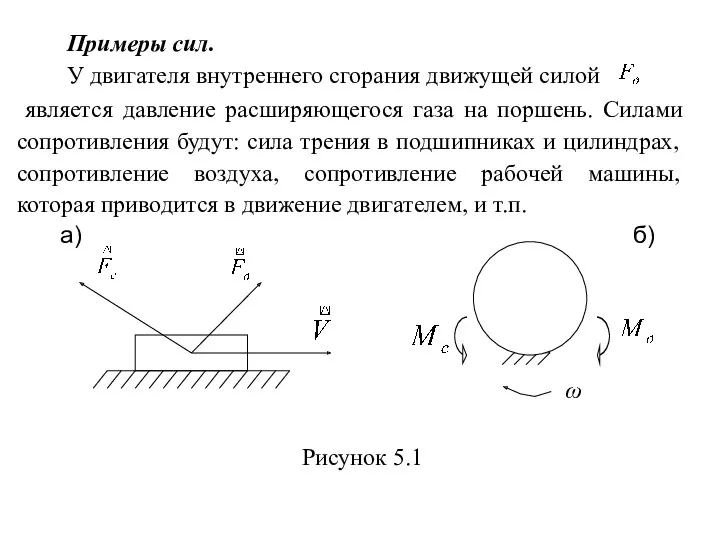
Примеры сил.
У двигателя внутреннего сгорания движущей силой
Примеры сил.
У двигателя внутреннего сгорания движущей силой
3. Силы инерции
и моменты сил инерции
Возникают при движении
3. Силы инерции
и моменты сил инерции
Возникают при движении
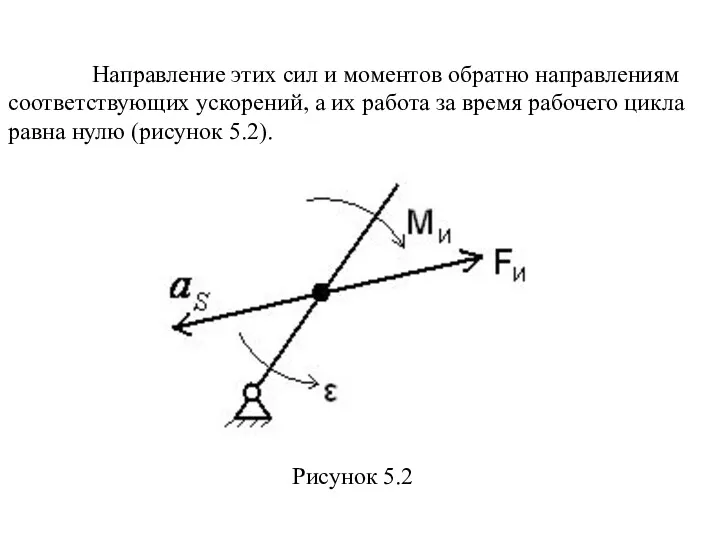
Направление этих сил и моментов обратно направлениям соответствующих ускорений, а
Направление этих сил и моментов обратно направлениям соответствующих ускорений, а
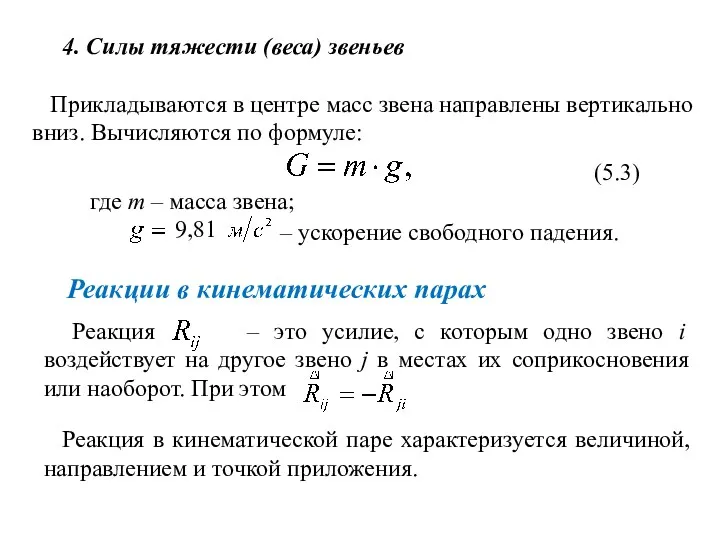
4. Силы тяжести (веса) звеньев
Прикладываются в центре масс звена направлены
4. Силы тяжести (веса) звеньев
Прикладываются в центре масс звена направлены
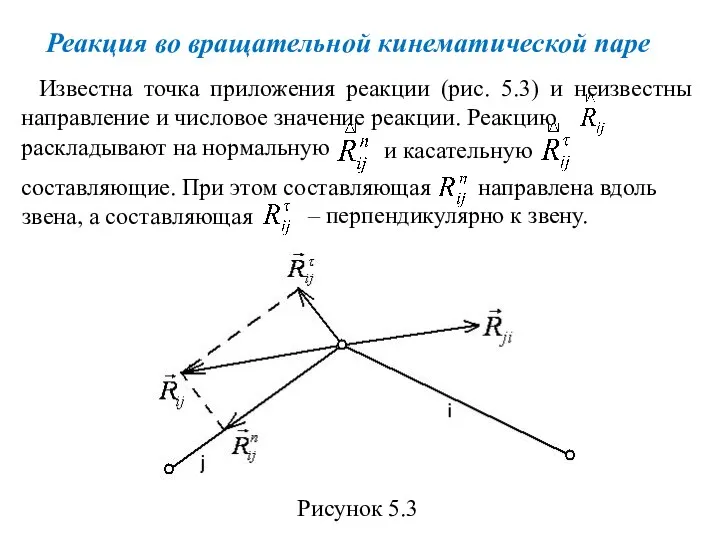
Реакция во вращательной кинематической паре
Известна точка приложения реакции (рис. 5.3)
Реакция во вращательной кинематической паре
Известна точка приложения реакции (рис. 5.3)
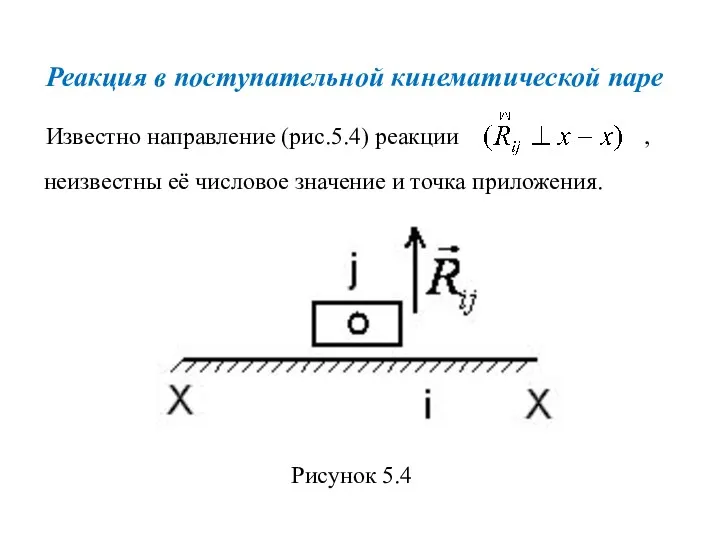
Реакция в поступательной кинематической паре
Известно направление (рис.5.4) реакции ,
неизвестны её числовое
Реакция в поступательной кинематической паре
Известно направление (рис.5.4) реакции ,
неизвестны её числовое
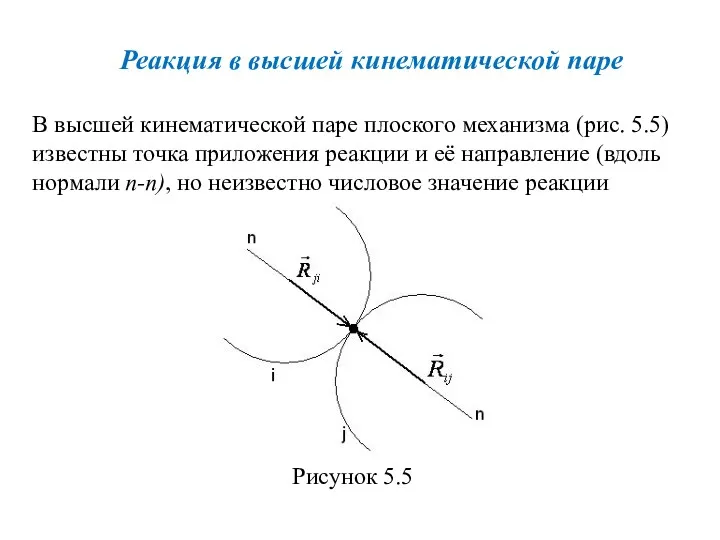
Реакция в высшей кинематической паре
В высшей кинематической паре плоского механизма
Реакция в высшей кинематической паре
В высшей кинематической паре плоского механизма
Принципы и последовательность силового расчета
При силовом расчете механизма в число
Принципы и последовательность силового расчета
При силовом расчете механизма в число
2. Принцип освобождаемости от связей:
не нарушая движения или покоя системы,
2. Принцип освобождаемости от связей:
не нарушая движения или покоя системы,
Это совпадает с условиями, которым удовлетворяют структурные группы Ассура. Следовательно, группы
Это совпадает с условиями, которым удовлетворяют структурные группы Ассура. Следовательно, группы
Порядок кинетостатического расчета механизма
1. Отсоединить последнюю группу Ассура от механизма
Порядок кинетостатического расчета механизма
1. Отсоединить последнюю группу Ассура от механизма
3. Определить значение нормальной составляющей реакции во внешней поступательной кинематической паре.
3. Определить значение нормальной составляющей реакции во внешней поступательной кинематической паре.

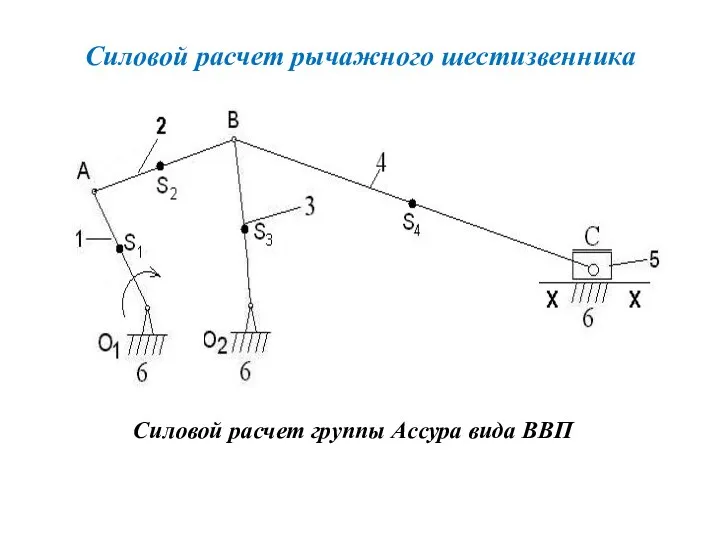
Силовой расчет рычажного шестизвенника
Силовой расчет группы Аcсура вида ВВП
Силовой расчет рычажного шестизвенника
Силовой расчет группы Аcсура вида ВВП
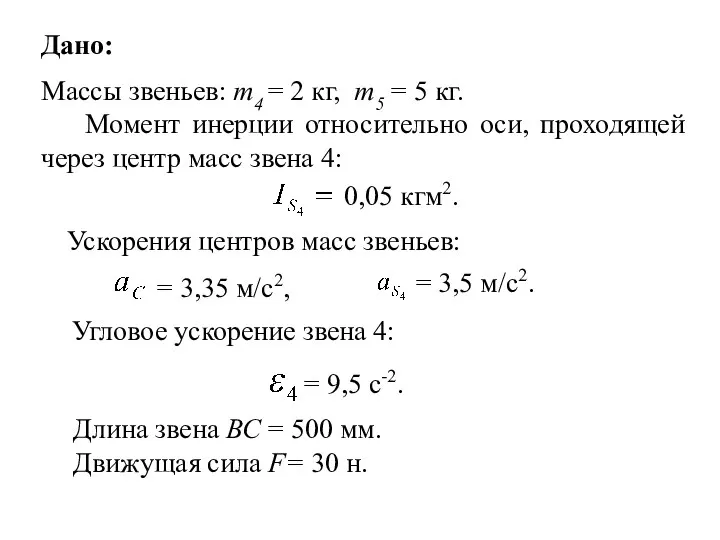
Дано:
Массы звеньев: m4 = 2 кг, m5 = 5 кг.
Дано:
Массы звеньев: m4 = 2 кг, m5 = 5 кг.
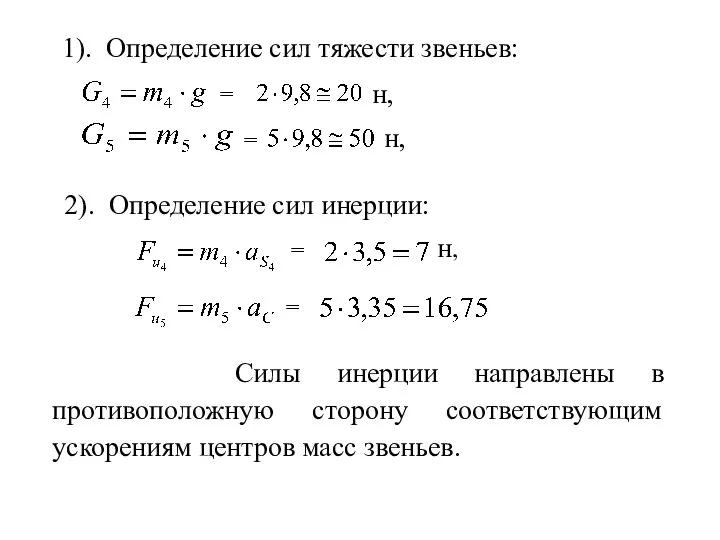
1). Определение сил тяжести звеньев:
=
н,
2). Определение сил
1). Определение сил тяжести звеньев:
=
н,
2). Определение сил
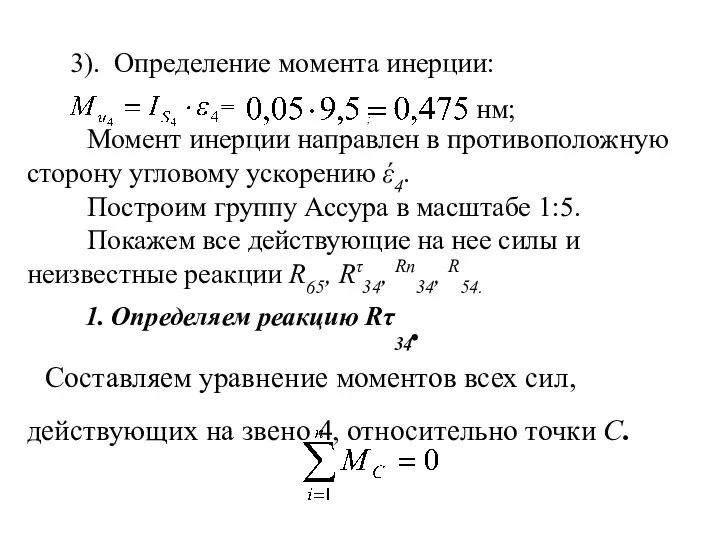
3). Определение момента инерции:
Момент инерции направлен в противоположную сторону угловому
3). Определение момента инерции:
Момент инерции направлен в противоположную сторону угловому
Находим реакцию Rτ34.
Длины плеч h1 и h2 измерены на расчетной схеме
Находим реакцию Rτ34.
Длины плеч h1 и h2 измерены на расчетной схеме
Строим план сил. В соответствии с векторным уравнением откладываем отрезки,
Строим план сил. В соответствии с векторным уравнением откладываем отрезки,

Таблица 1
Таблица 1
3. Определяем реакцию R54 .
Составляем векторное уравнение равновесия всех сил, действующих
3. Определяем реакцию R54 .
Составляем векторное уравнение равновесия всех сил, действующих
4. Определяем место расположения реакции R65.
Составим уравнение моментов всех сил, действующих
4. Определяем место расположения реакции R65.
Составим уравнение моментов всех сил, действующих
Ускорения центров масс звеньев 2 и 3:
= 5,45 м/с2
Ускорения центров масс звеньев 2 и 3:
= 5,45 м/с2
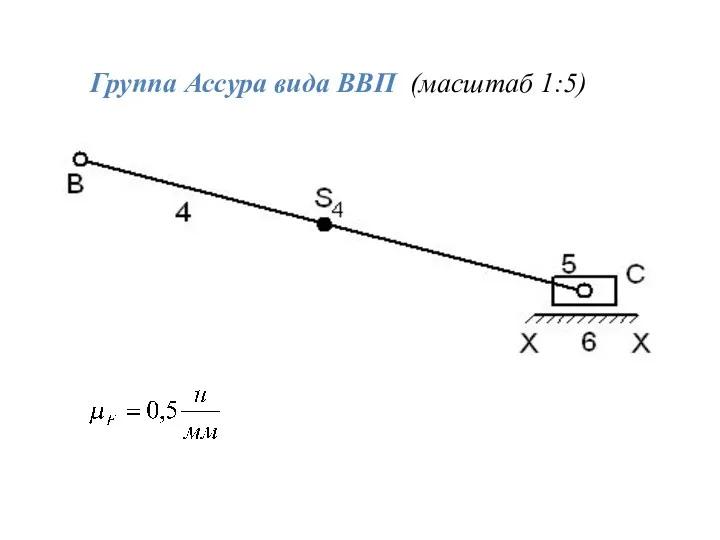
Группа Ассура вида ВВП (масштаб 1:5)
Группа Ассура вида ВВП (масштаб 1:5)
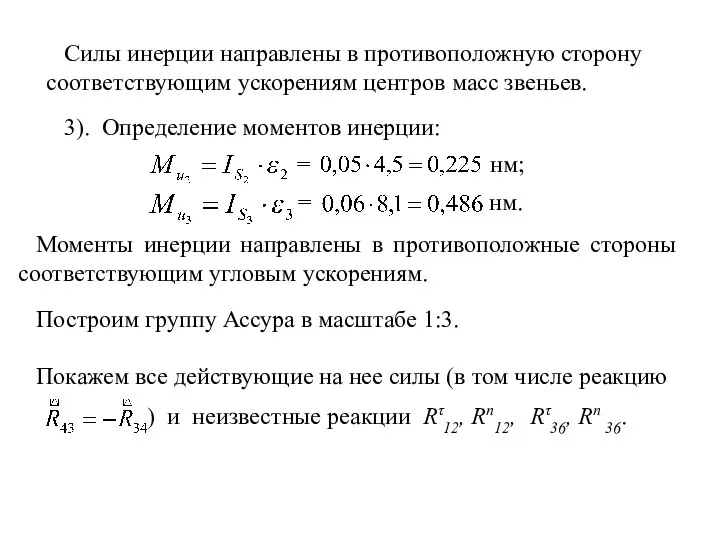
Силы инерции направлены в противоположную сторону соответствующим ускорениям центров масс звеньев.
3).
Силы инерции направлены в противоположную сторону соответствующим ускорениям центров масс звеньев.
3).

Определяем реакцию Rτ12.
Составим уравнение моментов всех сил, действующих
на звено
Определяем реакцию Rτ12.
Составим уравнение моментов всех сил, действующих
на звено
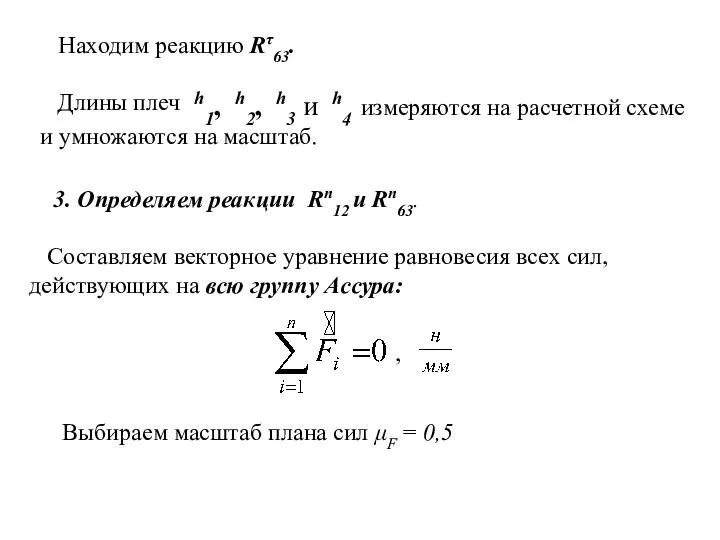
Находим реакцию Rτ63.
h1, h2, h3 и h4 измеряются на расчетной
Находим реакцию Rτ63.
h1, h2, h3 и h4 измеряются на расчетной
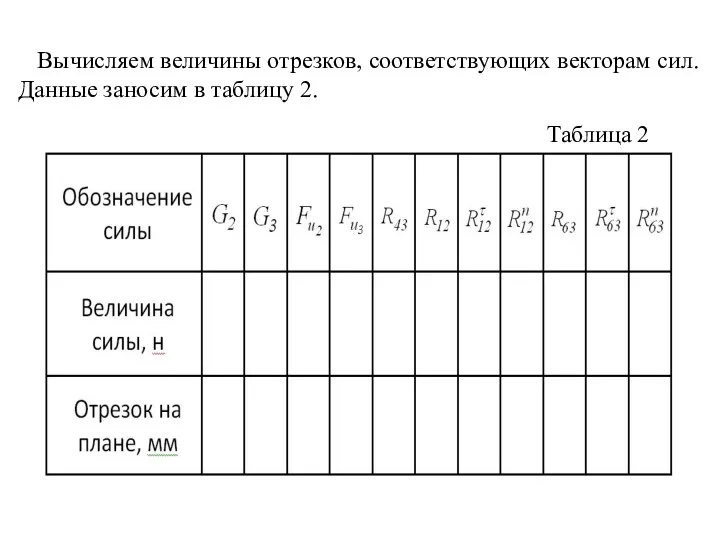
Вычисляем величины отрезков, соответствующих векторам сил. Данные заносим в таблицу
Вычисляем величины отрезков, соответствующих векторам сил. Данные заносим в таблицу
Строим план сил. В соответствии с векторным уравнением откладываем отрезки,
Строим план сил. В соответствии с векторным уравнением откладываем отрезки,
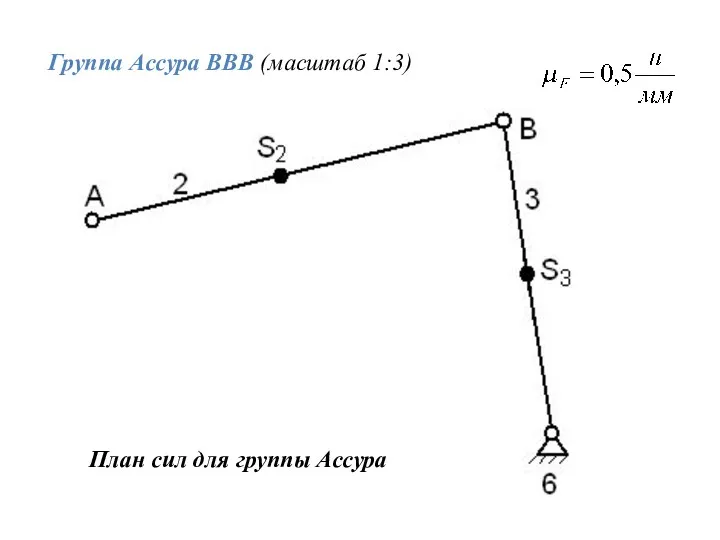
Группа Ассура ВВВ (масштаб 1:3)
План сил для группы Ассура
Группа Ассура ВВВ (масштаб 1:3)
План сил для группы Ассура
 Решение задач. Закон всемирного тяготения.
Решение задач. Закон всемирного тяготения. Мир физики
Мир физики Схематическое представление источников ионизирующих излучений, воздействующих на человека
Схематическое представление источников ионизирующих излучений, воздействующих на человека Сборка неподвижных и неразъемных соединений деталей
Сборка неподвижных и неразъемных соединений деталей Типовые схемные решения объемных гидроприводов
Типовые схемные решения объемных гидроприводов Постоянные магниты
Постоянные магниты Уравнение состояния идеального газа. Газовые законы
Уравнение состояния идеального газа. Газовые законы Пленки Лэнгмюра-Блоджетт
Пленки Лэнгмюра-Блоджетт Презентация Лабораторная работа №2 Измерение размеров малых тел 7 класс
Презентация Лабораторная работа №2 Измерение размеров малых тел 7 класс Сварные детали машин. Особенности проектирования и изготовления сварных деталей машин в машиностроении
Сварные детали машин. Особенности проектирования и изготовления сварных деталей машин в машиностроении Керамикалық, Электрлік оқшаулама материалдар
Керамикалық, Электрлік оқшаулама материалдар Преломление света. 8 класс
Преломление света. 8 класс Сходства и различия микро- и макромира
Сходства и различия микро- и макромира Электрическое освещение. Лекция 3
Электрическое освещение. Лекция 3 AdvPh mirrors
AdvPh mirrors Сложное сопротивление
Сложное сопротивление Электроемкость. Конденсаторы
Электроемкость. Конденсаторы Физика для любознательных
Физика для любознательных Әр түрлі иондаушы сәулелер көздері түрлерінің заттармен өзара әсерлесуі
Әр түрлі иондаушы сәулелер көздері түрлерінің заттармен өзара әсерлесуі Кристаллофизикалық координат жүйесі
Кристаллофизикалық координат жүйесі Паровые машины
Паровые машины Решение задач по теме Динамика. 10 класс
Решение задач по теме Динамика. 10 класс Виды машинных швов
Виды машинных швов Водород – главный элемент галактики
Водород – главный элемент галактики Транспортная энергетика. Теплопередача. (Лекция 9)
Транспортная энергетика. Теплопередача. (Лекция 9) Зачетная работа по физике
Зачетная работа по физике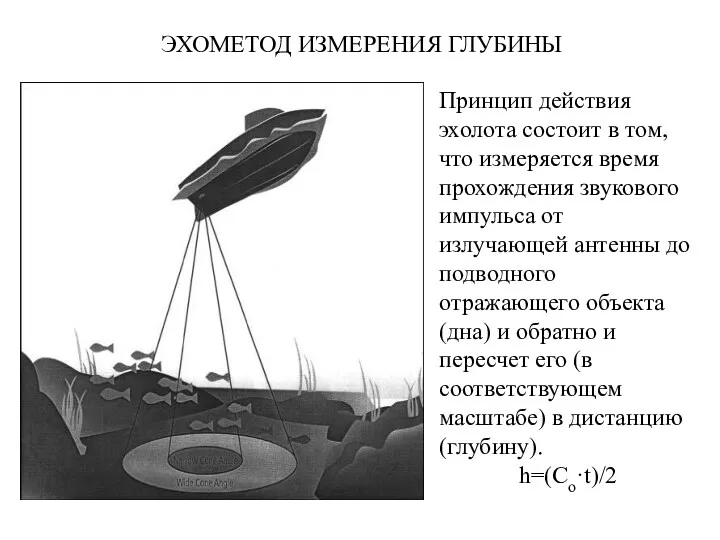 Эхометод измерения глубины
Эхометод измерения глубины Кампания ядерного реактора
Кампания ядерного реактора