- Системы автоматического управления

Содержание
- 2. Структурная схема САУ
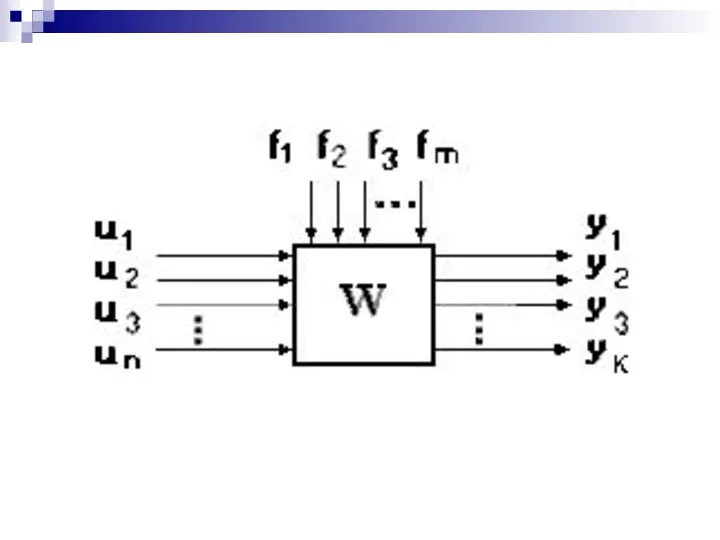
- 3. Функциональная схема САУ
- 5. САУ температурой печи
- 6. Принцип компенсации
- 7. Принцип обратной связи
- 8. Статические характеристики САУ y = F(u,f) K = y/u K = Δy/Δu ≠ const.
- 10. Динамические характеристики
- 11. Колебательный процесс
- 12. Уравнение динамики y(t) = F(u, f, t) Поэтому основным методом исследования САУ в динамических режимах является
- 13. Передаточная функция Дифференциальный оператор p = d/dt так, что, dy/dt = py, а pn = dn/dt.
- 14. Уравнение динамики K = bm/an
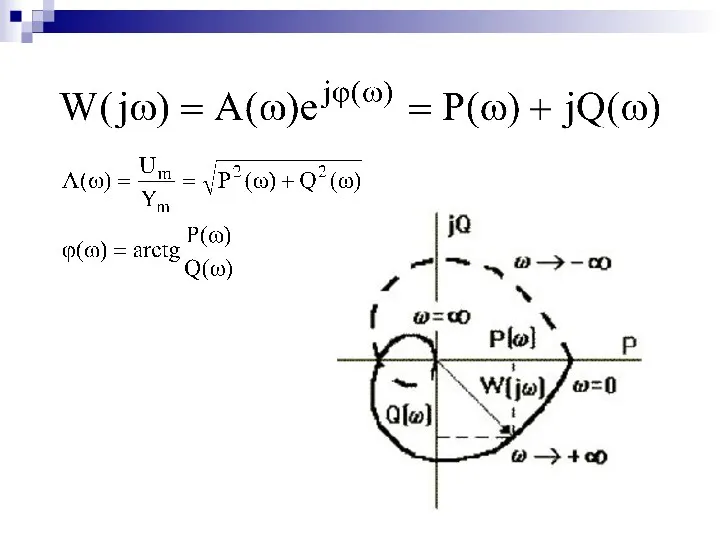
- 15. Частотные характеристики
- 17. Логарифмические частотные характеристики L(ω) = 20lgA(ω)
- 18. Временные характеристики
- 19. Элементарные звенья САУ
- 20. Пропорциональное звено Его уравнение: y(t) = ku(t). Передаточная функция: W(p) = k. Переходная характеристика: h(t) =
- 21. Интегрирующее звено Передаточная функция: W(p) = k/p. При k = 1 звено представляет собой “чистый” интегратор
- 22. Апериодическое звено
- 23. Колебательное звено
- 24. Дифференцирующее звено W(p) = kp АФЧХ: W(j ω )=jk ω; ВЧХ: P(ω) = 0; МЧХ: Q(ω)
- 25. Структурные схемы. Правила преобразования Структурной схемой САУ называют графическое изображение ее математической модели. Структурная схема САУ
- 26. Последовательное соединение
- 27. Параллельное соединение
- 28. Соединение с обратной связью
- 29. Устойчивость
- 30. Условие устойчивости
- 31. Необходимое условие устойчивости D(p) = aopn + a1pn-1 + a2pn-2 + ... + an = ao(p-p1)(p-p2)...(p-pn)
- 32. Критерий Гурвица
- 33. ПРИНЦИП АРГУМЕНТА D(p) = a0 (p - p1) (p - p2) ... (p - pn) =
- 34. Принцип аргумента D(jω) = |D(jω)|ejarg(D(jω)), где |D(jω)| = a0 |jω - p1| |jω - p2|...|jω -
- 35. Критерий устойчивости Михайлова
- 36. Критерий Михайлова
- 37. Критерий Найквиста
- 38. Критерий Найквиста
- 40. Скачать презентацию
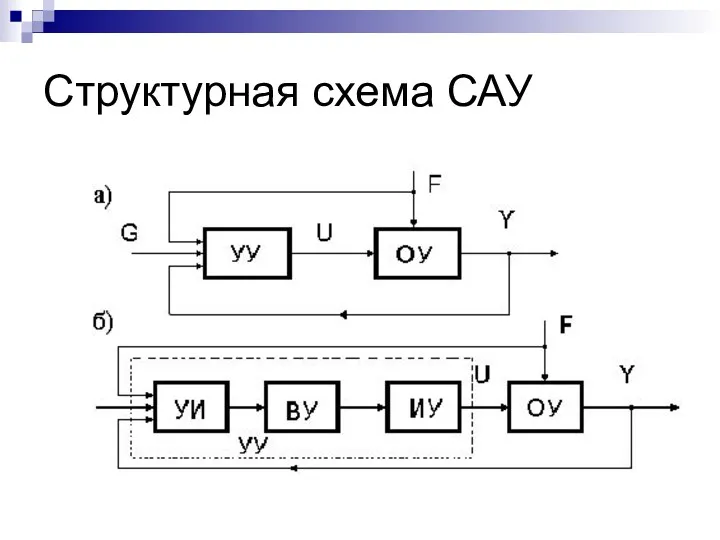
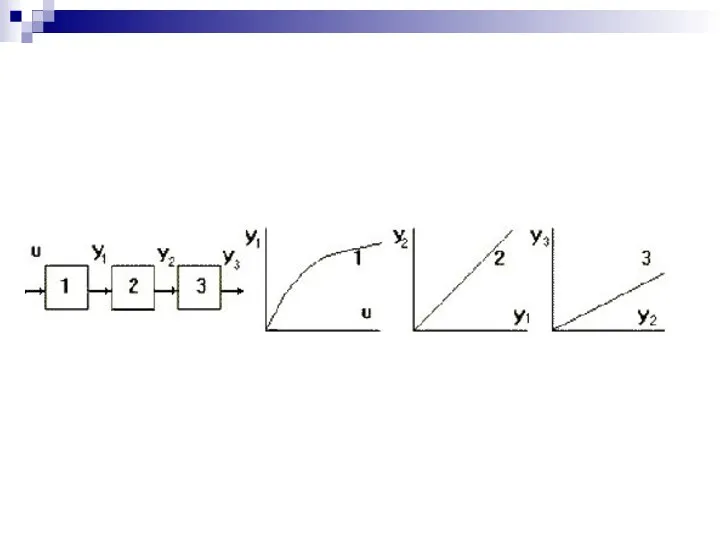
Структурная схема САУ
Структурная схема САУ

Функциональная схема САУ
Функциональная схема САУ
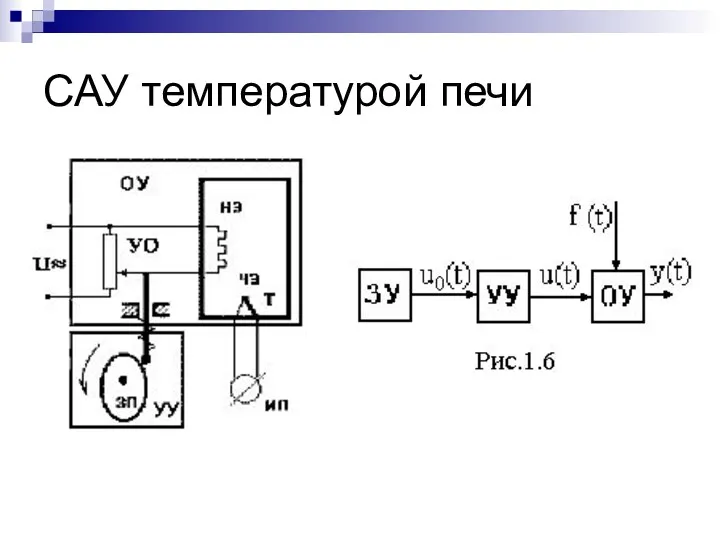
САУ температурой печи
САУ температурой печи

Принцип компенсации
Принцип компенсации
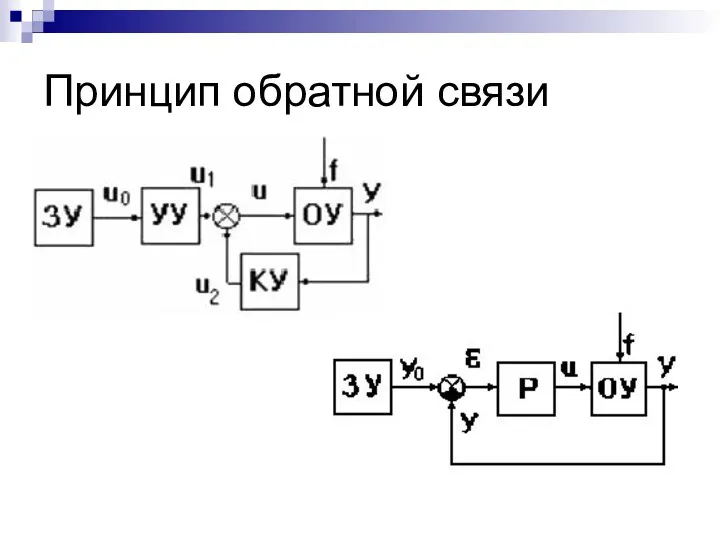
Принцип обратной связи
Принцип обратной связи
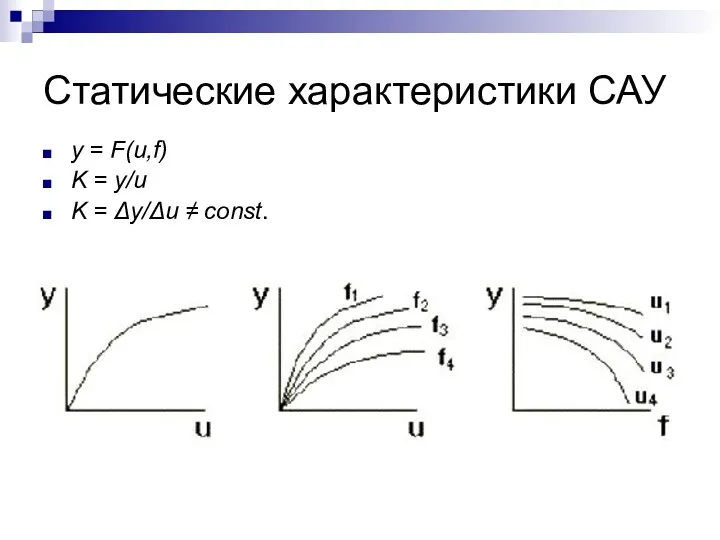
Статические характеристики САУ
y = F(u,f)
K = y/u
K = Δy/Δu
Статические характеристики САУ
y = F(u,f)
K = y/u
K = Δy/Δu
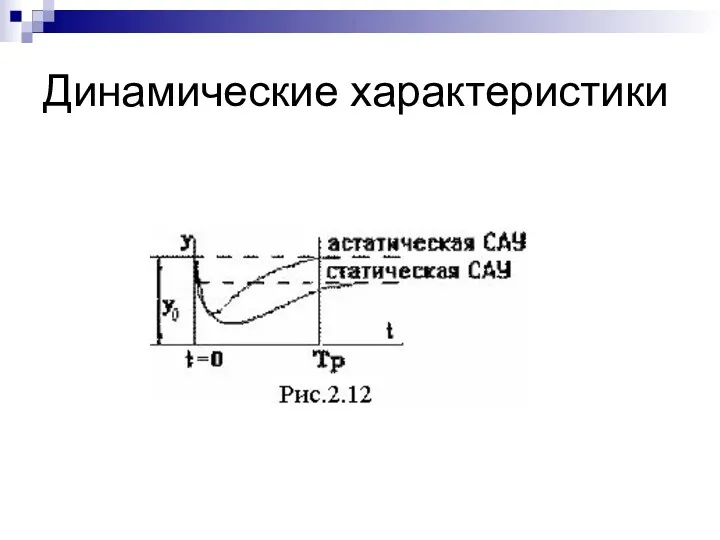
Динамические характеристики
Динамические характеристики
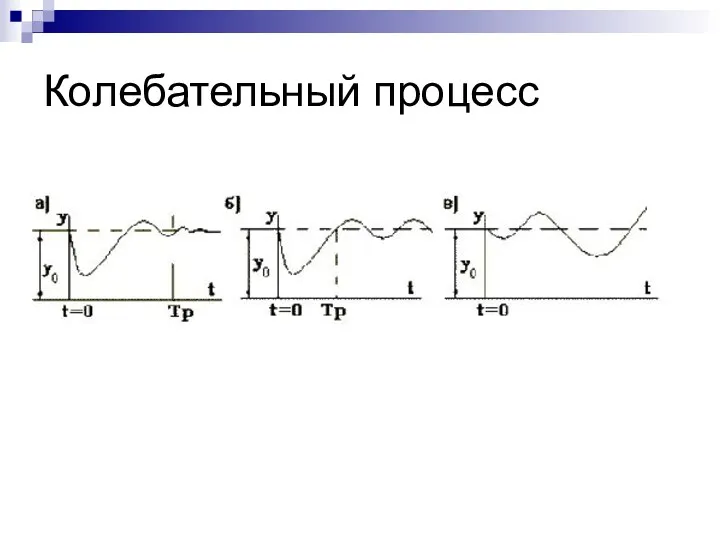
Колебательный процесс
Колебательный процесс
Уравнение динамики
y(t) = F(u, f, t)
Поэтому основным методом исследования САУ в
Уравнение динамики
y(t) = F(u, f, t)
Поэтому основным методом исследования САУ в
Передаточная функция
Дифференциальный оператор p = d/dt так, что, dy/dt = py,
Передаточная функция
Дифференциальный оператор p = d/dt так, что, dy/dt = py,
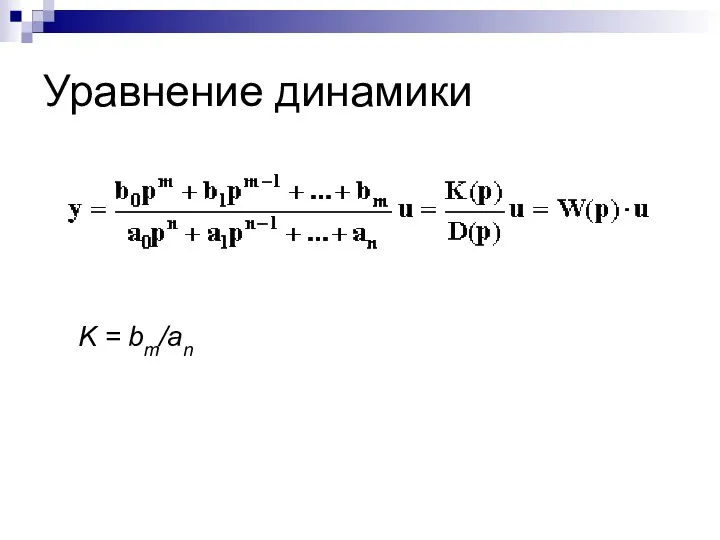
Уравнение динамики
K = bm/an
Уравнение динамики
K = bm/an
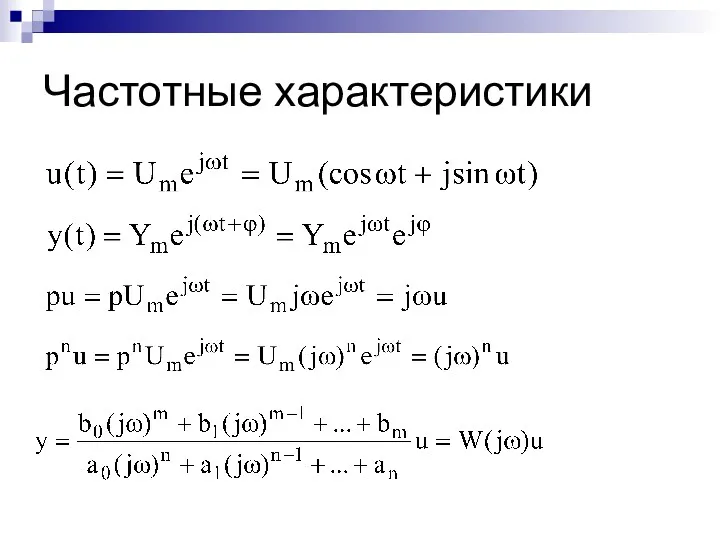
Частотные характеристики
Частотные характеристики
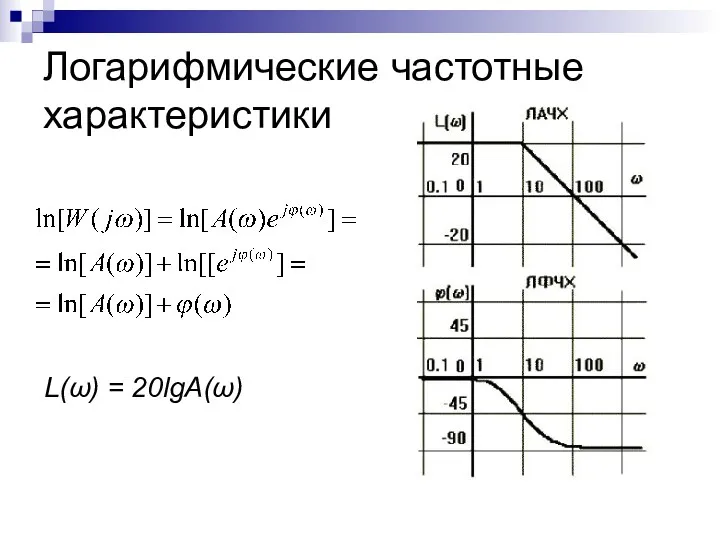
Логарифмические частотные характеристики
L(ω) = 20lgA(ω)
Логарифмические частотные характеристики
L(ω) = 20lgA(ω)
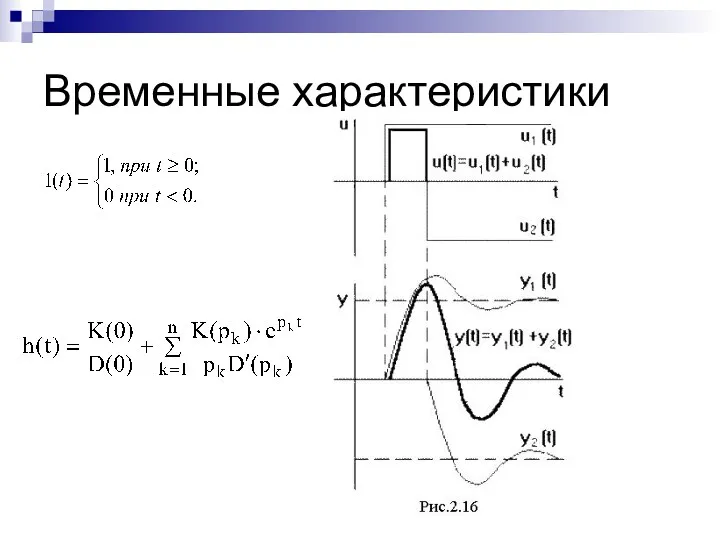
Временные характеристики
Временные характеристики
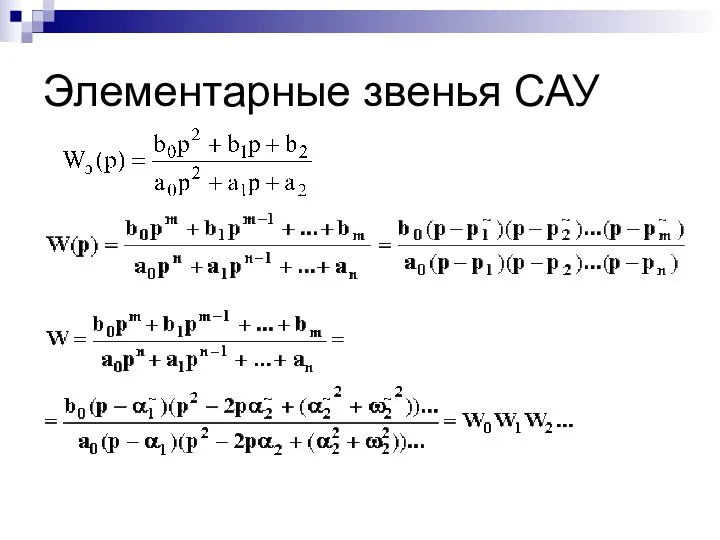
Элементарные звенья САУ
Элементарные звенья САУ

Пропорциональное звено
Его уравнение: y(t) = ku(t).
Передаточная функция: W(p) = k.
Переходная характеристика:
Пропорциональное звено
Его уравнение: y(t) = ku(t).
Передаточная функция: W(p) = k.
Переходная характеристика:
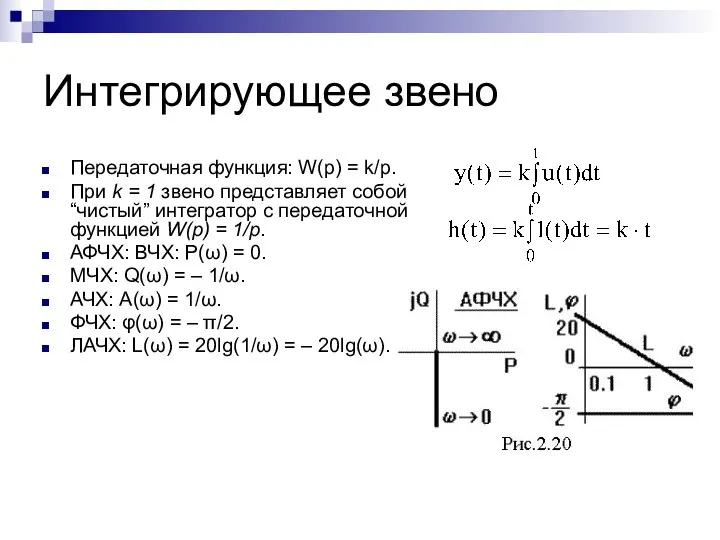
Интегрирующее звено
Передаточная функция: W(p) = k/p.
При k = 1 звено представляет
Интегрирующее звено
Передаточная функция: W(p) = k/p.
При k = 1 звено представляет
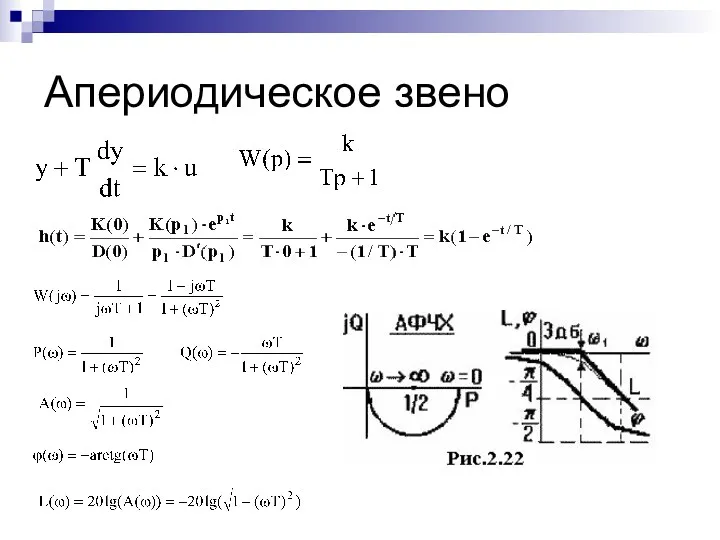
Апериодическое звено
Апериодическое звено
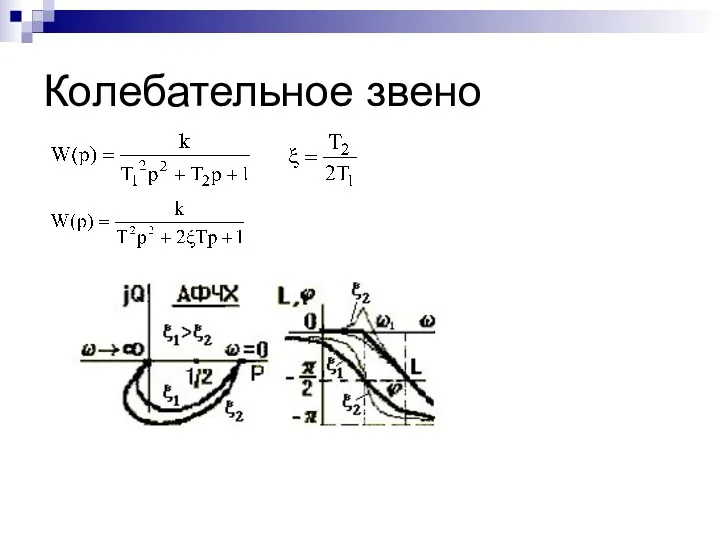
Колебательное звено
Колебательное звено
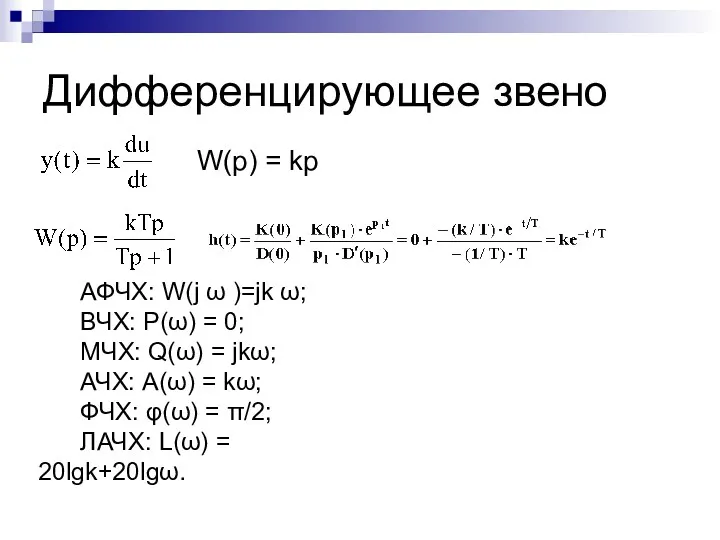
Дифференцирующее звено
W(p) = kp
АФЧХ: W(j ω )=jk ω;
ВЧХ: P(ω) =
Дифференцирующее звено
W(p) = kp
АФЧХ: W(j ω )=jk ω;
ВЧХ: P(ω) =
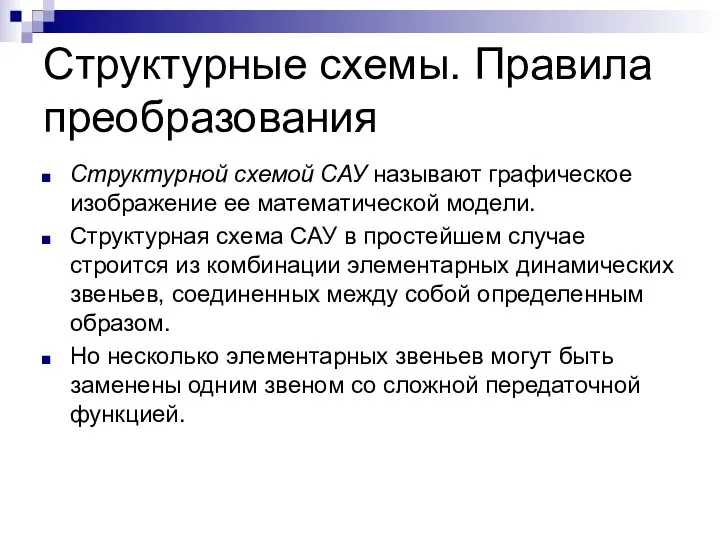
Структурные схемы. Правила преобразования
Структурной схемой САУ называют графическое изображение ее математической
Структурные схемы. Правила преобразования
Структурной схемой САУ называют графическое изображение ее математической
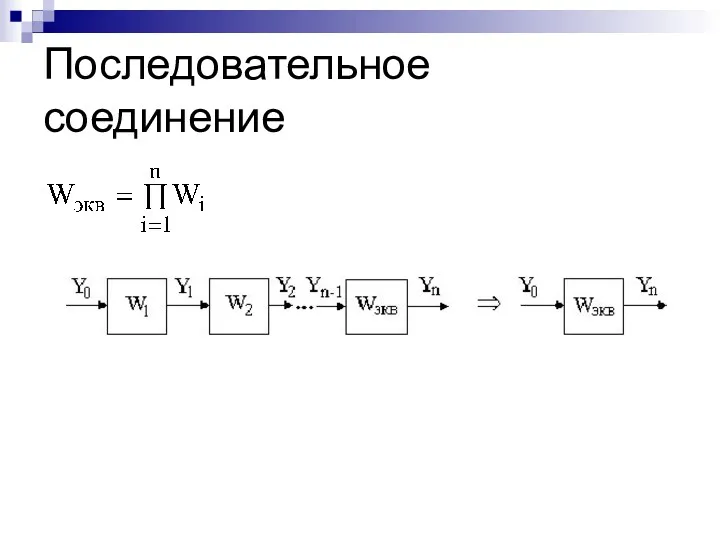
Последовательное соединение
Последовательное соединение
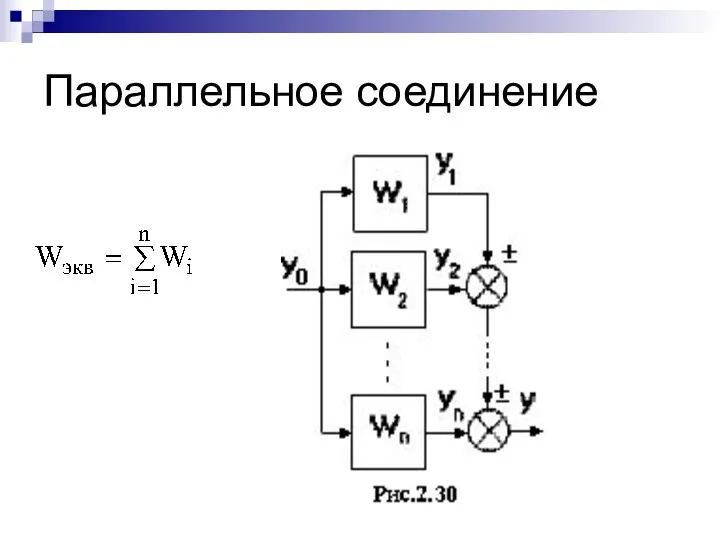
Параллельное соединение
Параллельное соединение
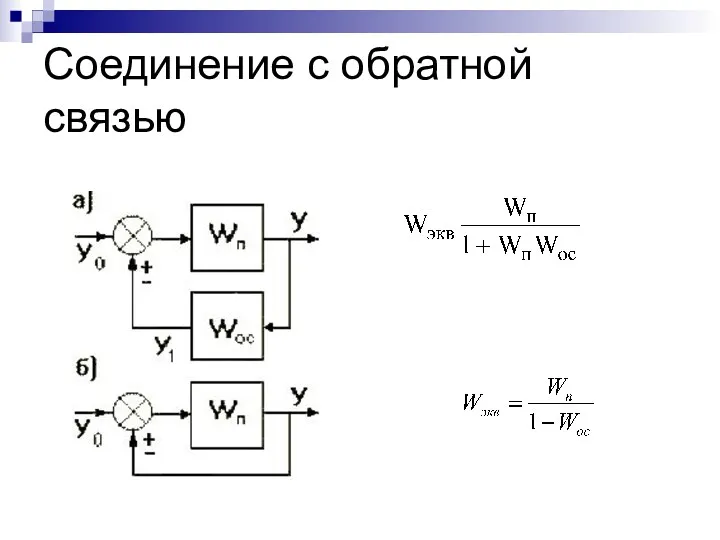
Соединение с обратной связью
Соединение с обратной связью

Устойчивость
Устойчивость
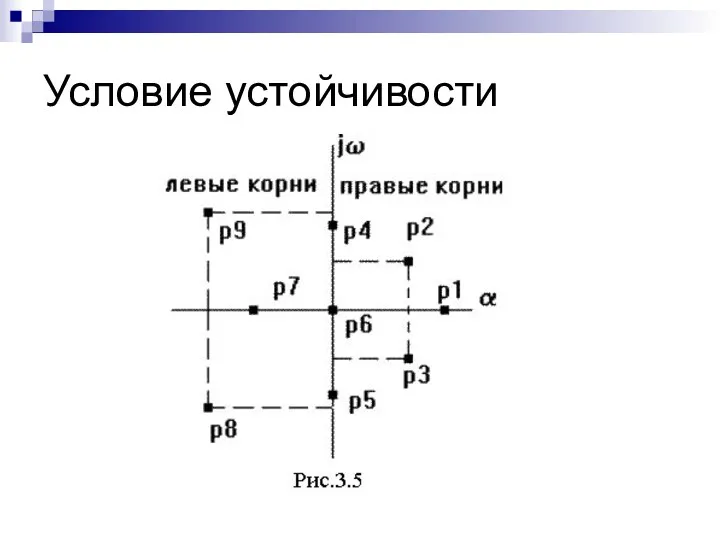
Условие устойчивости
Условие устойчивости
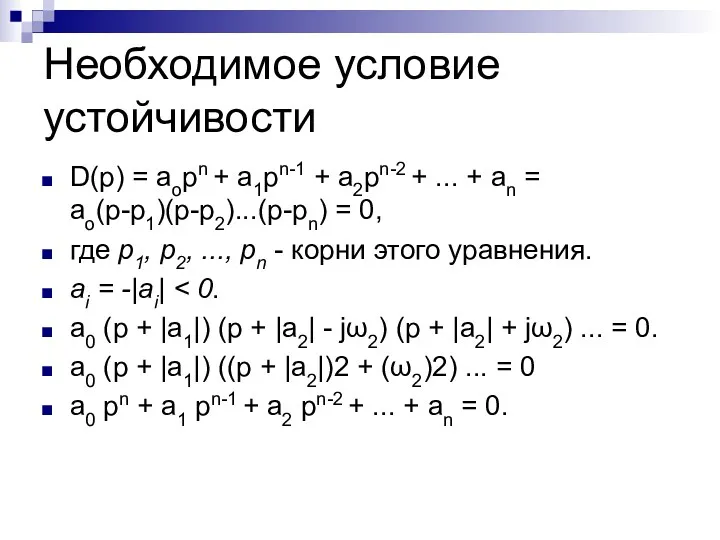
Необходимое условие устойчивости
D(p) = aopn + a1pn-1 + a2pn-2 + ...
Необходимое условие устойчивости
D(p) = aopn + a1pn-1 + a2pn-2 + ...
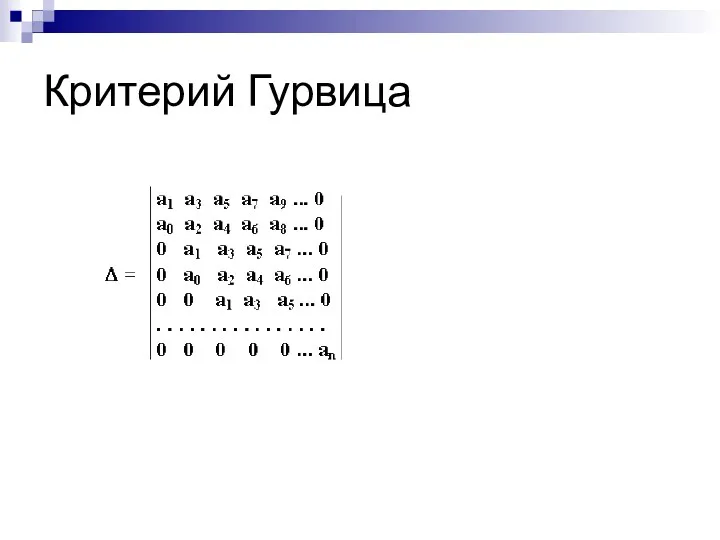
Критерий Гурвица
Критерий Гурвица
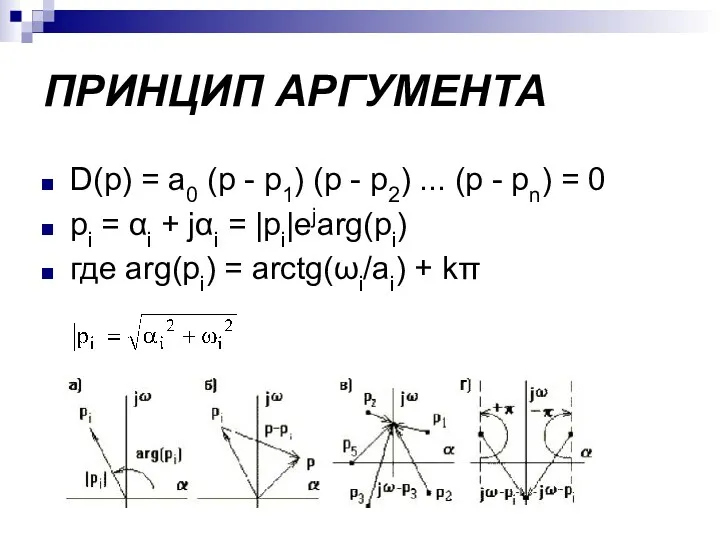
ПРИНЦИП АРГУМЕНТА
D(p) = a0 (p - p1) (p - p2)
ПРИНЦИП АРГУМЕНТА
D(p) = a0 (p - p1) (p - p2)
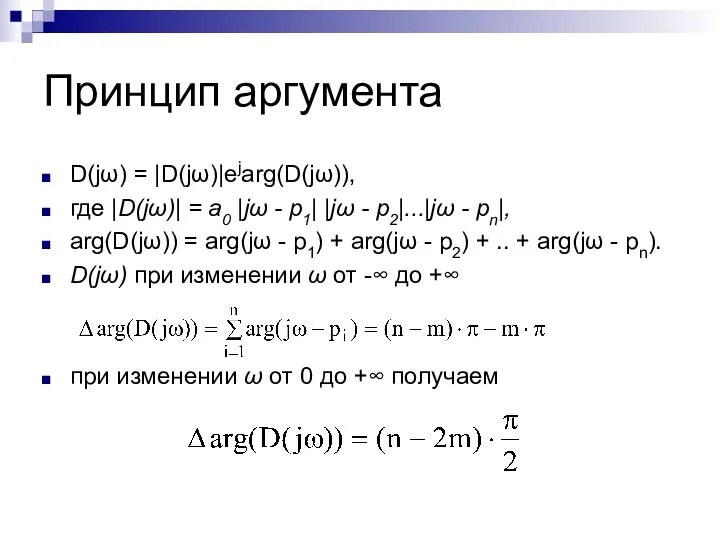
Принцип аргумента
D(jω) = |D(jω)|ejarg(D(jω)),
где |D(jω)| = a0 |jω - p1| |jω
Принцип аргумента
D(jω) = |D(jω)|ejarg(D(jω)),
где |D(jω)| = a0 |jω - p1| |jω
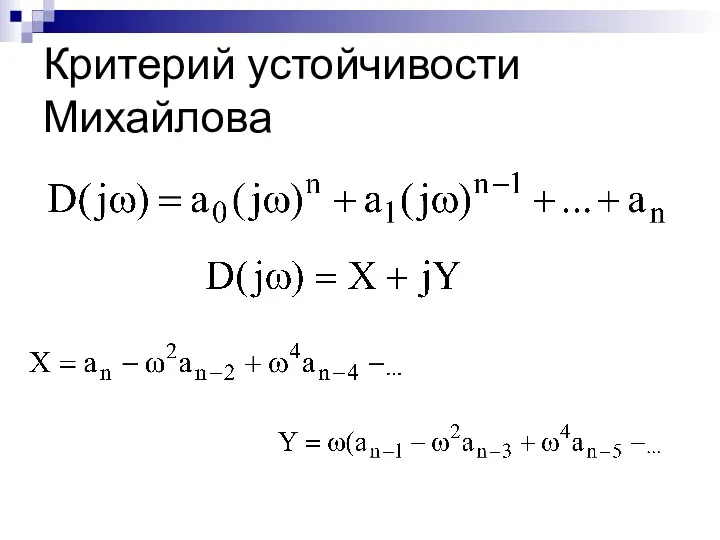
Критерий устойчивости Михайлова
Критерий устойчивости Михайлова
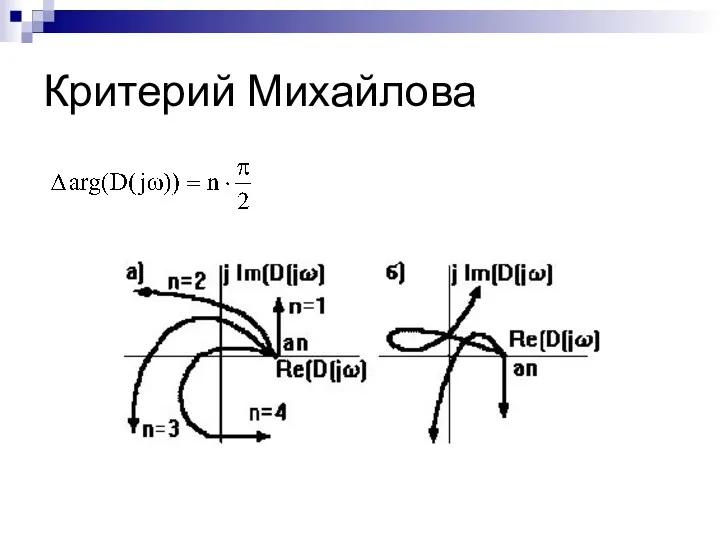
Критерий Михайлова
Критерий Михайлова
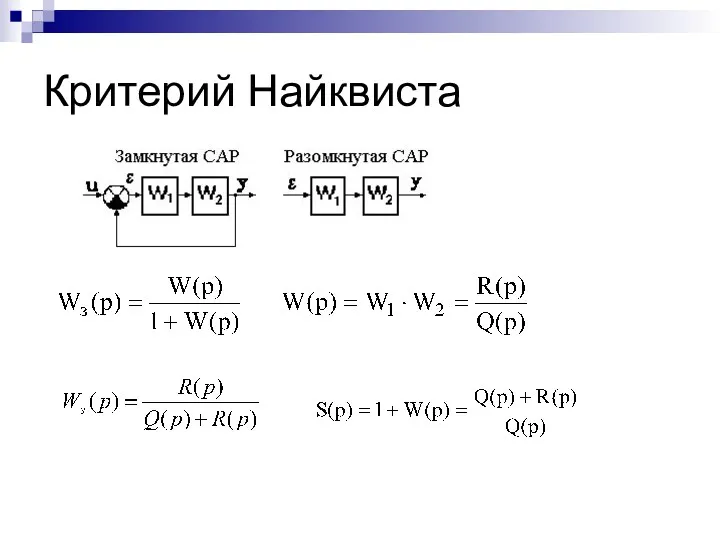
Критерий Найквиста
Критерий Найквиста
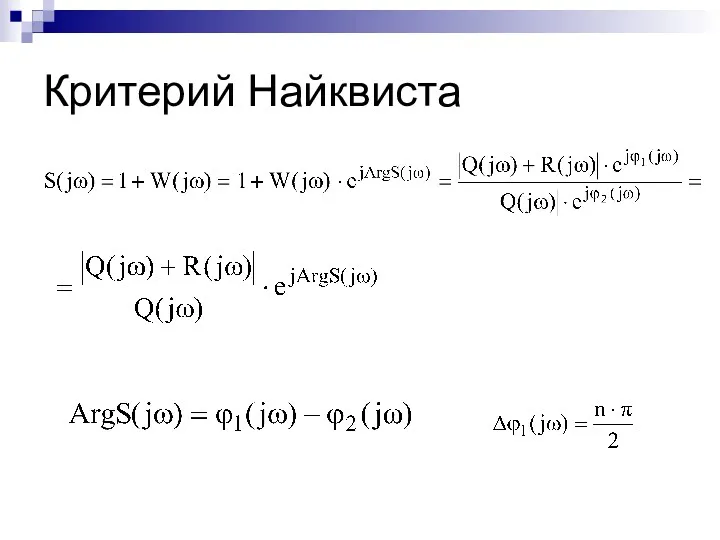
Критерий Найквиста
Критерий Найквиста
 Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость
Цель и задачи курса Техническая механика. Расчеты на прочность. Расчеты на жесткость Презентация урока по электротехнике
Презентация урока по электротехнике Расчет переходных процессов в электрических цепях классическим методом
Расчет переходных процессов в электрических цепях классическим методом Електромагнітні коливання і хвилі. Розв’язування задач
Електромагнітні коливання і хвилі. Розв’язування задач Интегрированный урок по физике и информатике 6 класс
Интегрированный урок по физике и информатике 6 класс Зрительное восприятие трехмерного пространства человеком. Системы формирования объемного изображения
Зрительное восприятие трехмерного пространства человеком. Системы формирования объемного изображения Теплоизмерительные приборы
Теплоизмерительные приборы X-radiation
X-radiation Atomic Structure
Atomic Structure Заломлення світла на межі поділу двох середовищ. Закон заломлення світла
Заломлення світла на межі поділу двох середовищ. Закон заломлення світла Аккумуляторные батареи. Назначение аккумуляторных батарей и их основные характеристики
Аккумуляторные батареи. Назначение аккумуляторных батарей и их основные характеристики Психодидактика: новые технологии в преподавании физики
Психодидактика: новые технологии в преподавании физики Материаловедение и технологии современных и перспективных материалов
Материаловедение и технологии современных и перспективных материалов Презентация к уроку 9 класс Механические колебания Диск
Презентация к уроку 9 класс Механические колебания Диск Разработка технологического процесса механической обработки детали: переходная – муфта
Разработка технологического процесса механической обработки детали: переходная – муфта Понятие о плазме
Понятие о плазме Отношение сигнал-шум на выходе приёмника ЧМ сигнала
Отношение сигнал-шум на выходе приёмника ЧМ сигнала Постоянный электрический ток. Наличие свободных электрических зарядов в проводнике
Постоянный электрический ток. Наличие свободных электрических зарядов в проводнике Магнитное поле постоянного электрического тока
Магнитное поле постоянного электрического тока Организация технического обслуживания и ремонта электрического и электромеханического оборудования
Организация технического обслуживания и ремонта электрического и электромеханического оборудования Применение сообщающихся сосудов
Применение сообщающихся сосудов Практическая аэродинамика
Практическая аэродинамика Ремонт остова тягового электродвигателя ЭД-118 А(Б)
Ремонт остова тягового электродвигателя ЭД-118 А(Б) разработка к уроку на тему Электролизация тел 8 класс
разработка к уроку на тему Электролизация тел 8 класс “Перемещение”
“Перемещение” Измерение фазового сдвига. Лекция №19
Измерение фазового сдвига. Лекция №19 Электромагнитное излучение, космические лучи и гравитационные волны
Электромагнитное излучение, космические лучи и гравитационные волны презентация по теме Сила трения.
презентация по теме Сила трения.