Тема 8. Методы автоматического регулирования параметров технологических систем. Лекция 23 презентация
- Тема 8. Методы автоматического регулирования параметров технологических систем. Лекция 23

Содержание
- 2. 8.1 Элементы теории автоматического управления 8.1.1 Основные термины и определения
- 3. Параметры технологического процесса Системы управления современными технологическими процессами характеризуются большим количеством технологических параметров, число которых может
- 4. Пример 1. Схема ручного регулирования температуры сушильного шкафа Задача заключается в том, что требуется вручную поддерживать
- 5. Дадим некоторые определения Объект управления (объект регулирования, ОУ) – устройство, требуемый режим работы которого должен поддерживаться
- 6. Структурная схема системы ручного регулирования к примеру 1
- 7. Пример 2. Схема автоматической системы регулирования (АСР) температуры сушильного шкафа. . В схеме используется ртутный термометр
- 8. Структурная схема автоматического регулирования
- 9. Автоматическая система регулирования температуры с измерительным мостом При температуре объекта, равной заданной, измерительный мост М(см. рис.)
- 10. Структурная схема автоматической системы регулирования температуры с измерительным мостом
- 11. Типовая структурная схема одноконтурной АСР Исходя из описанных примеров, можно определить типовую структурную схему одноконтурной АСР(см.
- 12. Определения параметров АСР Определения: Задающее воздействие (то же, что входное воздействие Х) - воздействие на систему,
- 13. Классификация АСР
- 14. Классификация АСР по назначению(по характеру изменения задания) • стабилизирующая АСР- система, алгоритм функционирования которой содержит предписание
- 15. Классификация АСР по количеству контуров • одноконтурные- содержащие один контур, • многоконтурные- содержащие несколько контуров.
- 16. Классификация АСР по числу регулируемых величин • одномерные- системы с 1 регулируемой величиной, • многомерные- системы
- 17. Классификация АСР по функциональному назначению АСР температуры, давления, расхода, уровня напряжения и т.д.
- 18. Классификация АСР по характеру используемых для управления сигналов аналоговые, цифровые.
- 19. Классификация АСР по характеру математических соотношений • линейные, для которых справедлив принцип суперпозиции; • нелинейные. Принцип
- 20. Классификация АСР по виду используемой для регулирования энергии • пневматические, • гидравлические, • электрические, • механические
- 21. Классификация АСР по принципу регулирования по отклонению; по возмущению; комбинированные.
- 22. АСР по принципу отклонения Подавляющее большинство систем построено по принципу обратной связи - регулирования по отклонению
- 23. АСР по принципу возмущения Данные системы могут быть использованы в том случае, если есть возможность измерения
- 24. АСР по принципу комбинирования Данный способ (см. рис.) достигает высокого качества управления, однако его применение ограничено
- 25. Классификация элементов автоматических систем управления
- 26. По функциональному назначению • измерительные, • усилительно-преобразовательные, • исполнительные, • корректирующие.
- 27. По виду энергии, используемой для работы • электрические, • гидравлические, • пневматические, • механические, • комбинированные.
- 28. По наличию или отсутствию вспомогательного источника энергии активные(с источником энергии), пассивные(без источника).
- 29. По характеру математических соотношений • линейные, • нелинейные.
- 30. По поведению в статическом режиме • статические, у которых имеется однозначная зависимость между входным и выходным
- 31. Характеристики и модели элементов и систем АСР
- 32. Основные методы описания (модели) АСР Работу системы регулирования можно описать словесно. Так, ранее нами рассматривалась система
- 33. Общие принципы описания моделей АСР В любой модели АСР система может быть представлена в виде звена,
- 34. Статические характеристики САУ
- 35. Статическая характеристика Статической характеристикой элемента называется зависимость установившихся значений выходной величины от значения величины на входе
- 36. Статический и астатический элемент САУ Статическим называется элемент, у которого при постоянном входном воздействии с течением
- 37. Линейный и нелинейный статический элемент Линейным статическим элементом называется безинерционный элемент, обладающий линейной статической характеристикой: Как
- 38. Статическая и астатическая САУ САУ называется статической, если при постоянном входном воздействии ошибка управления е стремится
- 39. Динамические характеристики САУ
- 40. Переходной процесс Переход системы от одного установившегося режима к другому при каких-либо входных воздействиях называется переходным
- 41. Виды динамических входных воздействий Поскольку входные воздействия могут изменяться во времени, то и переходные характеристики будут
- 42. Переходная характеристика Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие при нулевых начальных условиях,
- 43. Импульсная характеристика Импульсной характеристикой ω(t) называется реакция объекта на δ-функцию при нулевых начальных условиях. При подаче
- 44. Частотная характеристика Частотной характеристикой (ЧХ, АФХ и др.) называется зависимость амплитуды и фазы выходного сигнала системы
- 45. Дифференциальные уравнения. Линеаризация
- 46. Дифференциальные уравнения для описания работы АСР Известно, что любое движение, процессы передачи, обмена, преобразования энергии и
- 47. Проблема метода ДУ Однако, такой метод применим только в частных случаях. Дело в том, что в
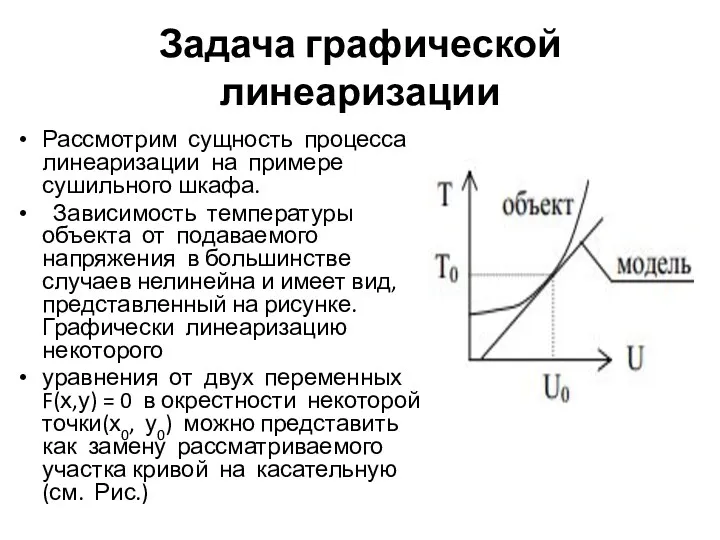
- 48. Задача графической линеаризации Рассмотрим сущность процесса линеаризации на примере сушильного шкафа. Зависимость температуры объекта от подаваемого
- 49. Уравнение касательной Уравнение касательной определяется по формуле: Где и - частные производные от F по х
- 50. Преобразования Лапласа
- 51. Переход от ДУ к алгебраическим уравнениям Исследование АСР существенно упрощается при использовании прикладных математических методов операционного
- 52. Формулы преобразования Лапласа Такой переход от ДУ к алгебраическому уравнению называется преобразованием Лапласа, формулы (2.2) соответственно
- 53. Переход от одной модели к другой Переход от одной модели к другой достаточно прост и заключается
- 54. Таблица преобразований Лапласа
- 55. Формулы обратного преобразования Лапласа
- 57. Скачать презентацию

8.1 Элементы теории автоматического управления
8.1.1 Основные термины и определения
8.1 Элементы теории автоматического управления
8.1.1 Основные термины и определения
Параметры технологического процесса
Системы управления современными технологическими процессами характеризуются большим количеством технологических
Параметры технологического процесса
Системы управления современными технологическими процессами характеризуются большим количеством технологических

Пример 1. Схема ручного регулирования температуры сушильного шкафа
Задача заключается в том,
Пример 1. Схема ручного регулирования температуры сушильного шкафа
Задача заключается в том,

Дадим некоторые определения
Объект управления (объект регулирования, ОУ) – устройство, требуемый режим
Дадим некоторые определения
Объект управления (объект регулирования, ОУ) – устройство, требуемый режим

Структурная схема системы ручного регулирования к примеру 1
Структурная схема системы ручного регулирования к примеру 1
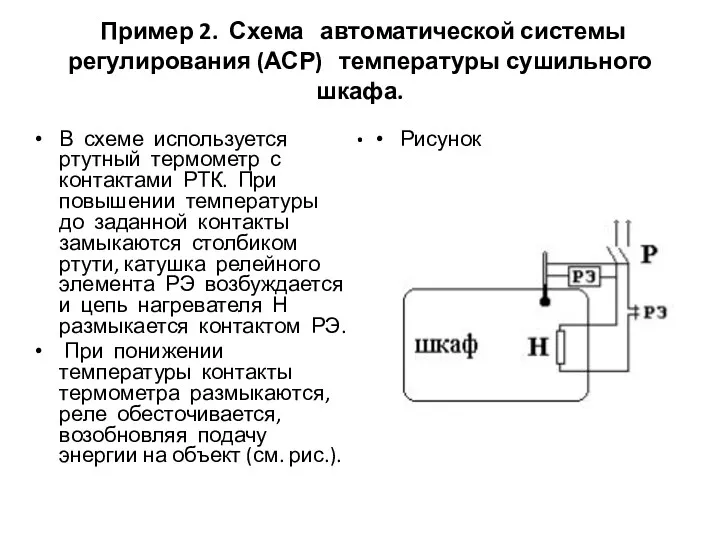
Пример 2. Схема автоматической системы регулирования (АСР) температуры сушильного шкафа.
Пример 2. Схема автоматической системы регулирования (АСР) температуры сушильного шкафа.
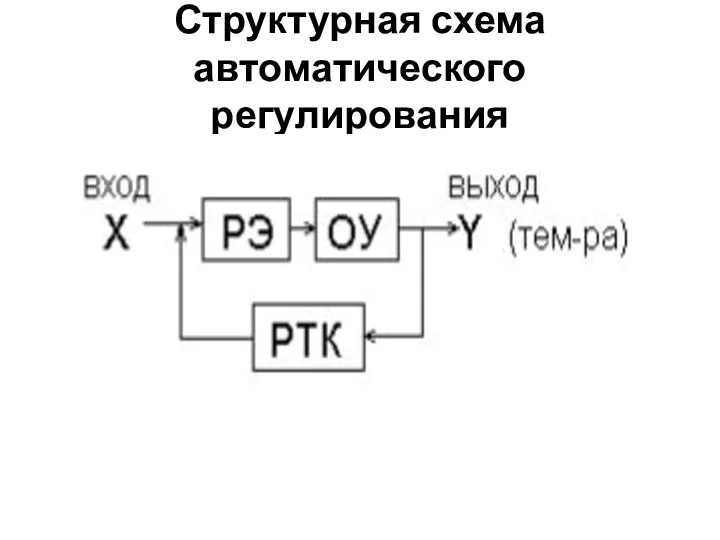
Структурная схема автоматического регулирования
Структурная схема автоматического регулирования
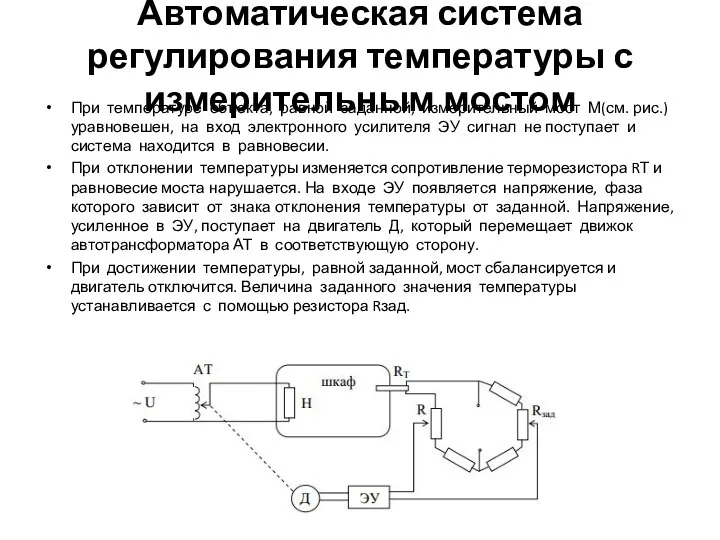
Автоматическая система регулирования температуры с измерительным мостом
При температуре объекта, равной заданной,
Автоматическая система регулирования температуры с измерительным мостом
При температуре объекта, равной заданной,

Структурная схема автоматической системы регулирования температуры с измерительным мостом
Структурная схема автоматической системы регулирования температуры с измерительным мостом

Типовая структурная схема одноконтурной АСР
Исходя из описанных примеров, можно определить типовую
Типовая структурная схема одноконтурной АСР
Исходя из описанных примеров, можно определить типовую

Определения параметров АСР
Определения:
Задающее воздействие (то же, что входное воздействие Х)
Определения параметров АСР
Определения:
Задающее воздействие (то же, что входное воздействие Х)

Классификация АСР
Классификация АСР
Классификация АСР по назначению(по характеру изменения задания)
• стабилизирующая АСР- система,
Классификация АСР по назначению(по характеру изменения задания)
• стабилизирующая АСР- система,

Классификация АСР по количеству контуров
• одноконтурные- содержащие один контур,
• многоконтурные-
Классификация АСР по количеству контуров
• одноконтурные- содержащие один контур,
• многоконтурные-
Классификация АСР по числу регулируемых величин
• одномерные- системы с 1
Классификация АСР по числу регулируемых величин
• одномерные- системы с 1

Классификация АСР по функциональному назначению
АСР температуры,
давления,
расхода,
уровня напряжения
и
Классификация АСР по функциональному назначению
АСР температуры,
давления,
расхода,
уровня напряжения
и
Классификация АСР по характеру используемых для управления сигналов
аналоговые,
цифровые.
Классификация АСР по характеру используемых для управления сигналов
аналоговые,
цифровые.

Классификация АСР по характеру математических соотношений
• линейные, для которых справедлив принцип
Классификация АСР по характеру математических соотношений
• линейные, для которых справедлив принцип

Классификация АСР по виду используемой для регулирования энергии
• пневматические,
• гидравлические,
Классификация АСР по виду используемой для регулирования энергии
• пневматические,
• гидравлические,

Классификация АСР по принципу регулирования
по отклонению;
по возмущению;
комбинированные.
Классификация АСР по принципу регулирования
по отклонению;
по возмущению;
комбинированные.

АСР по принципу отклонения
Подавляющее большинство систем построено по принципу обратной
АСР по принципу отклонения
Подавляющее большинство систем построено по принципу обратной

АСР по принципу возмущения
Данные системы могут быть использованы в том
АСР по принципу возмущения
Данные системы могут быть использованы в том
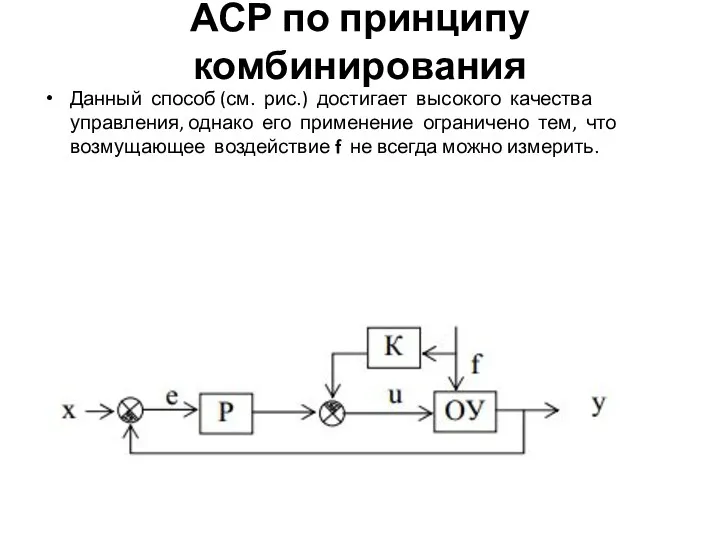
АСР по принципу комбинирования
Данный способ (см. рис.) достигает высокого качества управления,
АСР по принципу комбинирования
Данный способ (см. рис.) достигает высокого качества управления,

Классификация элементов автоматических систем управления
Классификация элементов автоматических систем управления

По функциональному назначению
• измерительные,
• усилительно-преобразовательные,
• исполнительные,
• корректирующие.
По функциональному назначению
• измерительные,
• усилительно-преобразовательные,
• исполнительные,
• корректирующие.

По виду энергии, используемой для работы
• электрические,
• гидравлические,
• пневматические,
По виду энергии, используемой для работы
• электрические,
• гидравлические,
• пневматические,

По наличию или отсутствию вспомогательного источника энергии
активные(с источником энергии),
пассивные(без источника).
По наличию или отсутствию вспомогательного источника энергии
активные(с источником энергии),
пассивные(без источника).
По характеру математических соотношений
• линейные,
• нелинейные.
По характеру математических соотношений
• линейные,
• нелинейные.
По поведению в статическом режиме
• статические, у которых имеется однозначная зависимость
По поведению в статическом режиме
• статические, у которых имеется однозначная зависимость
Характеристики и модели элементов и систем АСР
Характеристики и модели элементов и систем АСР

Основные методы описания (модели) АСР
Работу системы регулирования можно описать словесно. Так,
Основные методы описания (модели) АСР
Работу системы регулирования можно описать словесно. Так,

Общие принципы описания моделей АСР
В любой модели АСР система может быть
Общие принципы описания моделей АСР
В любой модели АСР система может быть

Статические характеристики САУ
Статические характеристики САУ

Статическая характеристика
Статической характеристикой элемента называется зависимость установившихся значений выходной величины от
Статическая характеристика
Статической характеристикой элемента называется зависимость установившихся значений выходной величины от
Статический и астатический элемент САУ
Статическим называется элемент, у которого при постоянном
Статический и астатический элемент САУ
Статическим называется элемент, у которого при постоянном
Линейный и нелинейный статический элемент
Линейным статическим элементом называется безинерционный элемент, обладающий
Линейный и нелинейный статический элемент
Линейным статическим элементом называется безинерционный элемент, обладающий
Статическая и астатическая САУ
САУ называется статической, если при постоянном входном воздействии
Статическая и астатическая САУ
САУ называется статической, если при постоянном входном воздействии

Динамические характеристики САУ
Динамические характеристики САУ

Переходной процесс
Переход системы от одного установившегося режима к другому при каких-либо
Переходной процесс
Переход системы от одного установившегося режима к другому при каких-либо
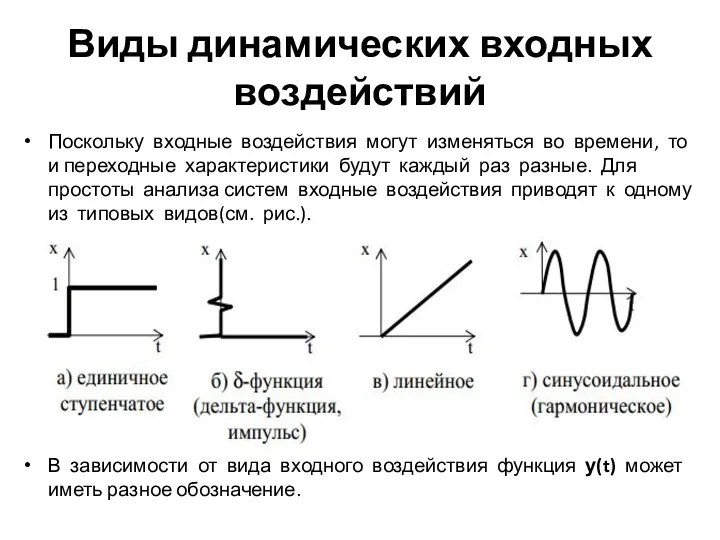
Виды динамических входных воздействий
Поскольку входные воздействия могут изменяться во времени, то
Виды динамических входных воздействий
Поскольку входные воздействия могут изменяться во времени, то

Переходная характеристика
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие
Переходная характеристика
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие

Импульсная характеристика
Импульсной характеристикой ω(t) называется реакция объекта на δ-функцию при нулевых
Импульсная характеристика
Импульсной характеристикой ω(t) называется реакция объекта на δ-функцию при нулевых

Частотная характеристика
Частотной характеристикой (ЧХ, АФХ и др.) называется зависимость амплитуды и
Частотная характеристика
Частотной характеристикой (ЧХ, АФХ и др.) называется зависимость амплитуды и

Дифференциальные уравнения. Линеаризация
Дифференциальные уравнения. Линеаризация
Дифференциальные уравнения для описания работы АСР
Известно, что любое движение, процессы передачи,
Дифференциальные уравнения для описания работы АСР
Известно, что любое движение, процессы передачи,

Проблема метода ДУ
Однако, такой метод применим только в частных случаях. Дело
Проблема метода ДУ
Однако, такой метод применим только в частных случаях. Дело
Задача графической линеаризации
Рассмотрим сущность процесса линеаризации на примере сушильного шкафа.
Зависимость
Задача графической линеаризации
Рассмотрим сущность процесса линеаризации на примере сушильного шкафа.
Зависимость

Уравнение касательной
Уравнение касательной определяется по формуле:
Где и - частные производные
Уравнение касательной
Уравнение касательной определяется по формуле:
Где и - частные производные

Преобразования Лапласа
Преобразования Лапласа

Переход от ДУ к алгебраическим уравнениям
Исследование АСР существенно упрощается при использовании
Переход от ДУ к алгебраическим уравнениям
Исследование АСР существенно упрощается при использовании

Формулы преобразования Лапласа
Такой переход от ДУ к алгебраическому уравнению называется преобразованием
Формулы преобразования Лапласа
Такой переход от ДУ к алгебраическому уравнению называется преобразованием
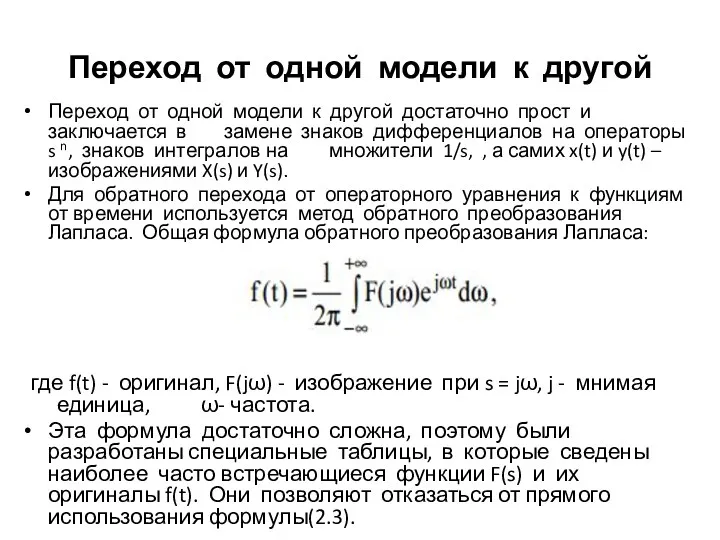
Переход от одной модели к другой
Переход от одной модели к другой
Переход от одной модели к другой
Переход от одной модели к другой

Таблица преобразований Лапласа
Таблица преобразований Лапласа
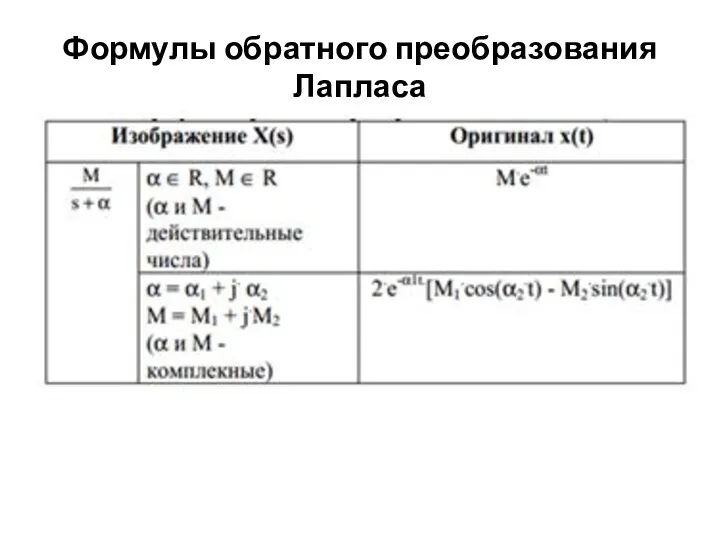
Формулы обратного преобразования Лапласа
Формулы обратного преобразования Лапласа
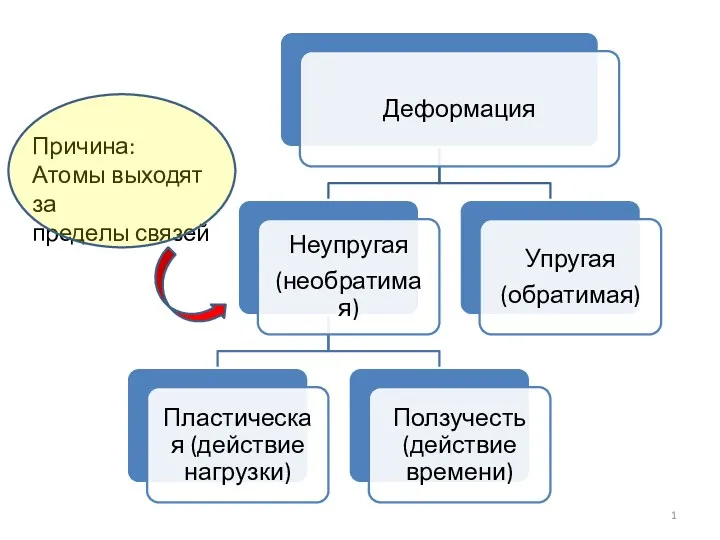 Деформация. Причина
Деформация. Причина Презентация Закон Ома
Презентация Закон Ома Тепловое излучение. Лекция 9
Тепловое излучение. Лекция 9 способы изм. вн. эн
способы изм. вн. эн Презентация Силы в природе
Презентация Силы в природе 20231116_otkrytyy_urok_-sila_treniya-_2
20231116_otkrytyy_urok_-sila_treniya-_2 тест по термодинамике 10 класс
тест по термодинамике 10 класс Презентация Физика в нашем доме
Презентация Физика в нашем доме Электростатика. Поле в диэлектриках
Электростатика. Поле в диэлектриках Взаимное притяжение и отталкивание молекул
Взаимное притяжение и отталкивание молекул 20231011_voltmetr_8_kl
20231011_voltmetr_8_kl Второй закон Ньютона. Масса
Второй закон Ньютона. Масса Примеры реализации тюнинга автомобилей с использованием современных технологий
Примеры реализации тюнинга автомобилей с использованием современных технологий Радиолокатор. Радиолокационные станции
Радиолокатор. Радиолокационные станции Внутрішня енергія
Внутрішня енергія Резерфорд тәжірибесі. Атомның планетарлық моделі
Резерфорд тәжірибесі. Атомның планетарлық моделі 1. Строение атома
1. Строение атома Электрические источники света
Электрические источники света Геометрическая и волновая оптика. Геометрическая оптика. Линзы. Оптическая система глаза
Геометрическая и волновая оптика. Геометрическая оптика. Линзы. Оптическая система глаза 1. Mechanika I
1. Mechanika I Трехфазные цепи переменного синусоидального тока. Лекция 5
Трехфазные цепи переменного синусоидального тока. Лекция 5 Кпс-4 қопсытқышы
Кпс-4 қопсытқышы Колесные пары и буксы железнодорожных вагонов
Колесные пары и буксы железнодорожных вагонов Естествознание. Почему дует ветер?
Естествознание. Почему дует ветер? Теория Большого Взрыва. The Big Bang Theory
Теория Большого Взрыва. The Big Bang Theory Урок Оптические приборы, физика11 класс
Урок Оптические приборы, физика11 класс Жидкое состояние вещества
Жидкое состояние вещества Основные законы идеального газа
Основные законы идеального газа