- Теория машин и механизмов

Содержание
- 2. Теория механизмов и машин (ТММ) излагает научные основы создания новых машин и механизмов, методы их построения
- 3. Анализ заключается в определении свойств существующих механизмов и машин. Это прямая задача механики машин. Синтез механизмов
- 4. Основные задачи дисциплины: Формирование знаний о видах, строении и свойствах основных типов механизмов, применяемых в машиностроении.
- 5. Машина есть устройство, создаваемое человеком для использования законов природы с целью облегчения физического и умственного труда,
- 6. машины энергетические кибернитические технологические информационные транспортные
- 7. I. Энергетические. В них происходит преобразование энергии из одного вида в другой (например, электрогенераторы, электродвигатели, двигатели
- 8. Машина, как правило, состоит из одного или нескольких механизмов. Механизмом называется искусственно созданная система тел, предназначенная
- 9. Основные допущения, используемые при моделировании механических систем: Идеализированные модели (общепринятые допущения): все составные части механической системы
- 10. механизмы электрические механические гидравлические пневматические
- 11. Твердые тела в составе механизма – звенья. Подвижное соединение двух звеньев, допускающее их относительное движение, называется
- 16. Классификация плоских кинематических пар Классификация по числу условий связей
- 17. на свободное твёрдое тело не наложено ни одной связи. Если обозначить число степеней свободы буквой H,
- 18. Класс кинематической пары определяется количеством наложенных связей: S = 5 такая кинематическая пара в соответствии с
- 19. S = 4 такая кинематическая пара в соответствии с числом S является парой 4-го класса
- 20. S = 3 такая кинематическая пара в соответствии с числом S является парой 3-го класса
- 21. Классификация по характеру касания элементов
- 22. Элемент кинематической пары – это совокупность точек, линий или поверхностей, которыми данное звено входит в касание
- 23. низшая высшая
- 24. Расчет подвижности плоского механизма
- 25. Подвижностью механизма (или его числом степеней свободы) называется количество обобщённых (независимых) координат, которое должен иметь механизм
- 26. Механизм – это кинематическая цепь с одним неподвижным звеном, допускающая целесообразные однозначно определенные движения. Степень подвижности
- 27. Структурная классификация механизмов Принцип структурного образования механизмов по Л.В. Ассуру
- 28. Кинематическая цепь, которая после присоединения её всеми свободными элементами кинематических пар к стойке получает подвижность, равную
- 29. Группы Ассура делятся на классы и порядки. Класс группы определяется классом наиболее сложного замкнутого контура в
- 30. Порядок групп Ассура определяется количеством свободных элементов кинематических пар, которыми группы Ассура присоединяются к другим звеньям.
- 31. Классификация механизмов. Формула строения
- 32. Класс механизма – это класс группы Ассура наиболее высокого класса. При одном ведущем звене При двух
- 34. Кинематика рычажных механизмов
- 35. Задачи исследования 1)Определение положений звеньев механизма и определение траекторий отдельных его точек. 2)Определение линейных скоростей точек
- 36. Аналитический метод Метод заключается в определении математических выражений, описывающих функциональную связь между входными и выходными параметрами
- 37. Графоаналитический метод Метод заключается в определении функции положения механизма при помощи разметки механизма. Разметка механизма –
- 38. Определение скоростей и ускорений Планом скоростей (ускорений) механизма называется пучок векторов, выходящих из одной точки (полюса
- 39. скорости ускорения .
- 40. Метод кинематических диаграмм (метод графического дифференцирования)
- 41. Кинетостатика механизмов
- 42. В этом разделе изучаются силы, действующие на звенья механизмов. Из-за ограниченности объёма данной работы здесь рассматриваются
- 43. Расчёт сил инерции Поступательное движение звена . Вращательное движение звена
- 44. Общие положения силового расчёта Принцип Даламбера: если к системе сил, действующих на подвижную систему, добавить силы
- 45. Силовой расчёт группы Ассура 2-3 Р3+Ри3+G3+G2+Ри2+R12t+R12п+R03=0
- 46. Силовой расчёт кривошипа (ведущего звена) Р21+Ри1+G1+R01=0 М21 = R21⋅h21 = - Мур
- 48. Скачать презентацию
 Воздухоплавание
Воздухоплавание Поверхностное натяжение. Смачивание. Капиллярные явления
Поверхностное натяжение. Смачивание. Капиллярные явления Простые механизмы. Рычаг
Простые механизмы. Рычаг Теорема о кинетической энергии
Теорема о кинетической энергии Улаштування та технічне обслуговування кривошипно-шатунного механізму. Влаштування та ТО газорозподільного механізму (1)
Улаштування та технічне обслуговування кривошипно-шатунного механізму. Влаштування та ТО газорозподільного механізму (1) Презентация к уроку по физике (8 класс) Импульс тела. Закон сохранения импульса.
Презентация к уроку по физике (8 класс) Импульс тела. Закон сохранения импульса. Классификация плоских механизмов
Классификация плоских механизмов Двигатель для перспективного самолёта-штурмовика – турбореактивный двигатель Р-195
Двигатель для перспективного самолёта-штурмовика – турбореактивный двигатель Р-195 Распространение радиоволн
Распространение радиоволн Конкурс индивидуальных проектов по физике. Тема: Альтернативные источники электроэнергии
Конкурс индивидуальных проектов по физике. Тема: Альтернативные источники электроэнергии Haemodynamics Haemorheology
Haemodynamics Haemorheology Látka a teplo. Výpočet tepla
Látka a teplo. Výpočet tepla Полупроводники
Полупроводники Асинхронды қозғалтқыш
Асинхронды қозғалтқыш Ядерный реактор
Ядерный реактор Транспортное средство для курьерской доставки “kursus”
Транспортное средство для курьерской доставки “kursus” Конструкция автомобиля. Полуоси
Конструкция автомобиля. Полуоси Үйкеліс күші
Үйкеліс күші Урок-презентация Внутреннее строение звезд
Урок-презентация Внутреннее строение звезд Расчет цепей постоянного тока
Расчет цепей постоянного тока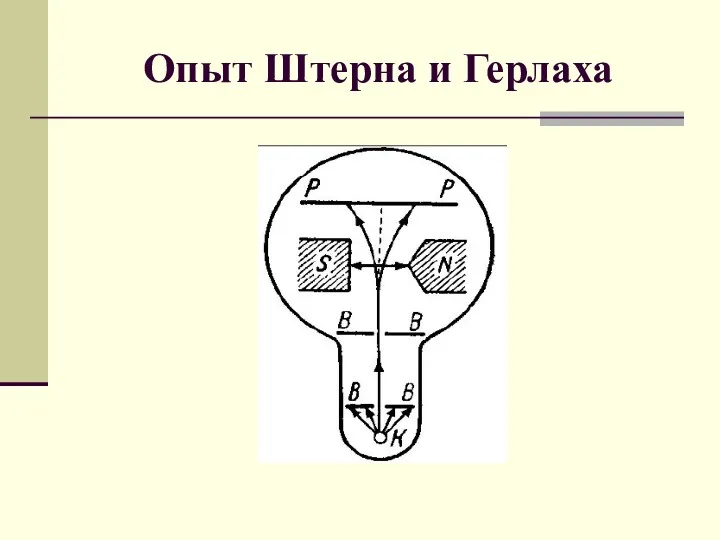 Опыт Штерна и Герлаха
Опыт Штерна и Герлаха Физические задачи Шерлока Холмса /презентация, материал о детективе/
Физические задачи Шерлока Холмса /презентация, материал о детективе/ Давление в жидкости и газе. Расчет давления жидкости на дно и стенки сосуда
Давление в жидкости и газе. Расчет давления жидкости на дно и стенки сосуда Магнитное поле. Постоянные магниты и их свойства. Опыт Эрстеда. Линии магнитного поля
Магнитное поле. Постоянные магниты и их свойства. Опыт Эрстеда. Линии магнитного поля قوة المولد بروفايل
قوة المولد بروفايل Холодильные машины
Холодильные машины Методическая разработка открытого занятия кружка по физике: Мыльная опера на все времена, или что такое...
Методическая разработка открытого занятия кружка по физике: Мыльная опера на все времена, или что такое... Мастер класс Реализация компетентностного подхода в преподавании физики через организацию самостоятельных исследований при решении физических задач
Мастер класс Реализация компетентностного подхода в преподавании физики через организацию самостоятельных исследований при решении физических задач