Управление колебаниями системы маятник-тележка с приводом методом скоростного биградиента презентация
- Управление колебаниями системы маятник-тележка с приводом методом скоростного биградиента

Содержание
- 2. План Введение и постановка задачи Синтез алгоритма управления Результаты моделирования Вывод
- 3. Постановка задачи Подобный пример приведен статье MIT
- 4. Уравнение привода и ЦУ Уравнение системы «тележка-маятник» в матричной форме: динамика привода : ЦУ: раскачивание маятника
- 5. Методика синтеза Система управления является двухкаскадной, а ЦУ зависит от фазовых переменных выходного каскада, целесообразно воспользоваться
- 6. Этап 1. Синтез виртуального управления выходным каскадом
- 7. Отклонение от желаемого уровня энергии Этап 1. Синтез виртуального управления выходным каскадом Кандидат на функцию Ляпунова
- 8. Этап 2. Синтез алгоритма управления, обеспечивающего сходимость отклонения выхода привода от виртуального управления к нулю дополнительная
- 9. Результаты моделирования Проведем моделирование замкнутой системы управления со следующими параметрами: Условия моделирования: Начальные условия: Перемещение и
- 10. Результаты моделирования Управляющая сила. Управление. Энергия маятника и желаемый уровень энергии.
- 11. Вывод Рассмотрена задача стабилизации неустойчивого положения тележки с маятником, управляемой приводом. Синтезирован алгоритм управления первым и
- 13. Скачать презентацию
План
Введение и постановка задачи
Синтез алгоритма управления
Результаты моделирования
Вывод
План
Введение и постановка задачи
Синтез алгоритма управления
Результаты моделирования
Вывод
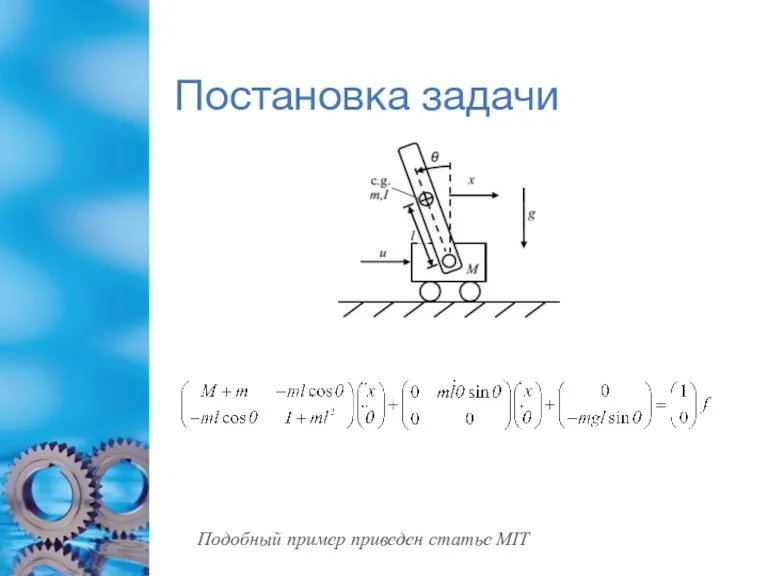
Постановка задачи
Подобный пример приведен статье MIT
Постановка задачи
Подобный пример приведен статье MIT
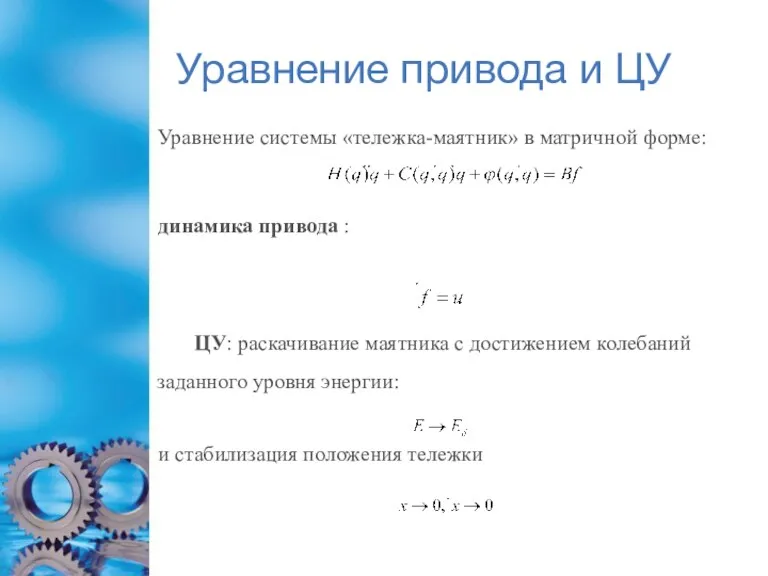
Уравнение привода и ЦУ
Уравнение системы «тележка-маятник» в матричной форме:
динамика привода :
ЦУ: раскачивание маятника
Уравнение привода и ЦУ
Уравнение системы «тележка-маятник» в матричной форме:
динамика привода :
ЦУ: раскачивание маятника
Методика синтеза
Система управления является двухкаскадной, а ЦУ зависит от фазовых переменных выходного каскада,
Методика синтеза
Система управления является двухкаскадной, а ЦУ зависит от фазовых переменных выходного каскада,
Этап 1. Синтез виртуального управления выходным каскадом
Этап 1. Синтез виртуального управления выходным каскадом
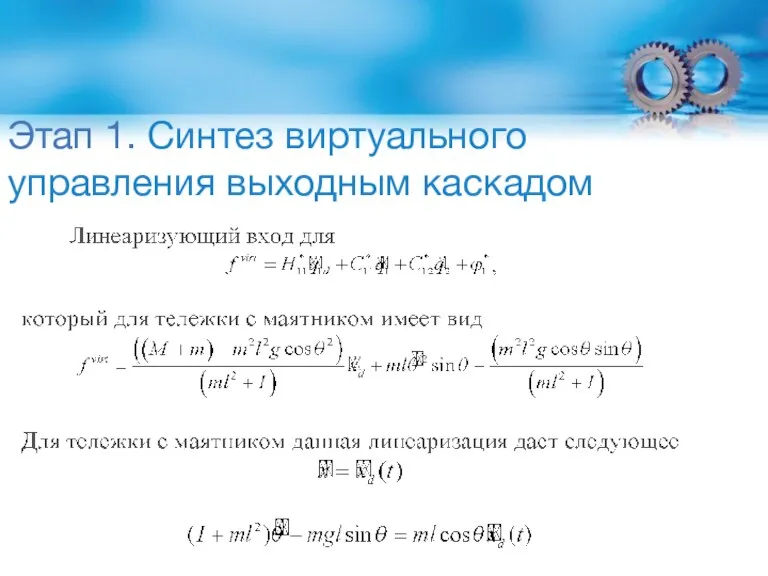
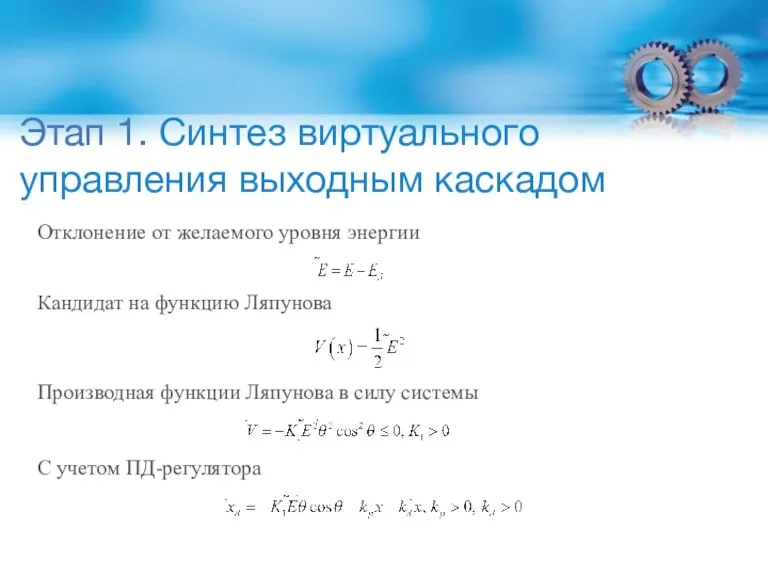
Отклонение от желаемого уровня энергии
Этап 1. Синтез виртуального управления выходным каскадом
Кандидат
Отклонение от желаемого уровня энергии
Этап 1. Синтез виртуального управления выходным каскадом
Кандидат
Этап 2. Синтез алгоритма управления, обеспечивающего сходимость отклонения выхода привода от виртуального управления
Этап 2. Синтез алгоритма управления, обеспечивающего сходимость отклонения выхода привода от виртуального управления

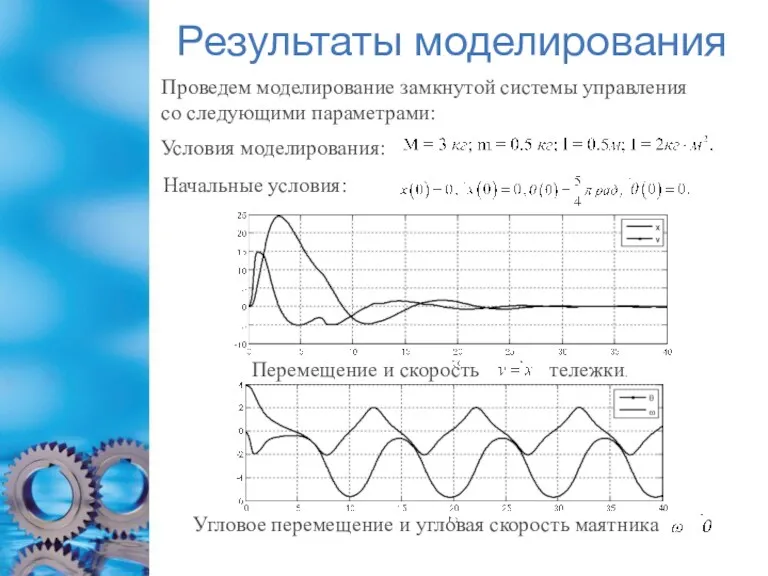
Результаты моделирования
Проведем моделирование замкнутой системы управления со следующими параметрами:
Условия моделирования:
Начальные условия:
Перемещение и
Результаты моделирования
Проведем моделирование замкнутой системы управления со следующими параметрами:
Условия моделирования:
Начальные условия:
Перемещение и
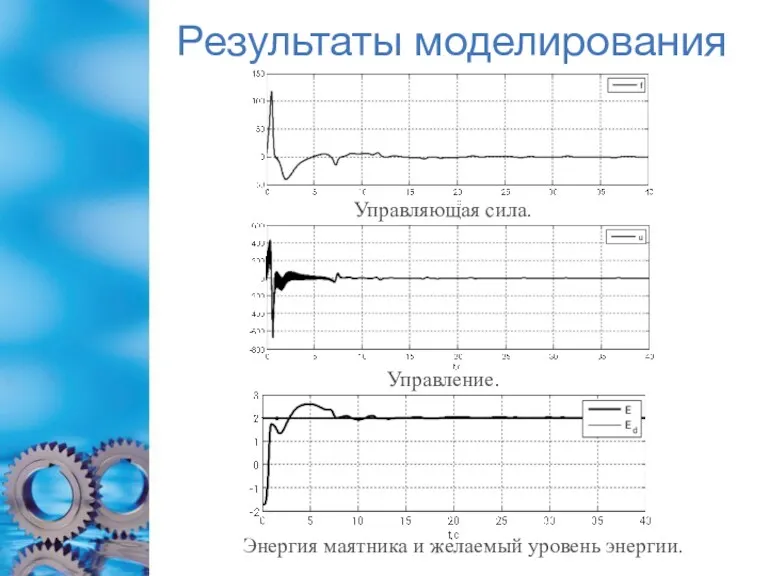
Результаты моделирования
Управляющая сила.
Управление.
Энергия маятника и желаемый уровень энергии.
Результаты моделирования
Управляющая сила.
Управление.
Энергия маятника и желаемый уровень энергии.
Вывод
Рассмотрена задача стабилизации неустойчивого положения тележки с маятником, управляемой приводом. Синтезирован алгоритм управления
Вывод
Рассмотрена задача стабилизации неустойчивого положения тележки с маятником, управляемой приводом. Синтезирован алгоритм управления
 Характеристика радіозв’язку
Характеристика радіозв’язку Детали машин и основы конструирования. Общие сведения. (Раздел 1)
Детали машин и основы конструирования. Общие сведения. (Раздел 1) Гидродинамика. Введение в гидродинамику. Виды движения
Гидродинамика. Введение в гидродинамику. Виды движения Физика - это наука!
Физика - это наука! Открытие и наблюдение элементарных частиц
Открытие и наблюдение элементарных частиц Автоматизация в современном производсве
Автоматизация в современном производсве Машиностроение. Изготовление зубчатых колес
Машиностроение. Изготовление зубчатых колес Сферические зеркала. Построение изображений
Сферические зеркала. Построение изображений Генератор переменного тока. Виды генераторов
Генератор переменного тока. Виды генераторов Основные характеристики и виды изнашивания
Основные характеристики и виды изнашивания Разработка урока Кипение. Удельная теплота парообразования
Разработка урока Кипение. Удельная теплота парообразования Двигатели постоянного тока
Двигатели постоянного тока Диагностика технического состояния системы охлаждения двигателя автомобиля КамАЗ-5320
Диагностика технического состояния системы охлаждения двигателя автомобиля КамАЗ-5320 Молекулярно-кинетическая теория идеальных газов
Молекулярно-кинетическая теория идеальных газов Внутренняя энергия. Температура
Внутренняя энергия. Температура Баяндама Альберт Эйнштейн
Баяндама Альберт Эйнштейн Маневренность (Управляемость корабля)
Маневренность (Управляемость корабля) Движение тела по окружности. 9 класс
Движение тела по окружности. 9 класс Напряжение шага
Напряжение шага Трансформатор – основний пристрій для перетворення електричної енергії
Трансформатор – основний пристрій для перетворення електричної енергії Метод конечных разностей во временной области Finite - Difference Time - Domain (FDTD)
Метод конечных разностей во временной области Finite - Difference Time - Domain (FDTD) Рентгеноструктурный анализ
Рентгеноструктурный анализ Режим промывки насоса
Режим промывки насоса Электронный парамагнитный резонанс
Электронный парамагнитный резонанс Презентация к уроку: Удивительный мир кристаллов
Презентация к уроку: Удивительный мир кристаллов Измерение силы Архимеда
Измерение силы Архимеда Патриотизм считается одной из главных ценностей жизни россиян
Патриотизм считается одной из главных ценностей жизни россиян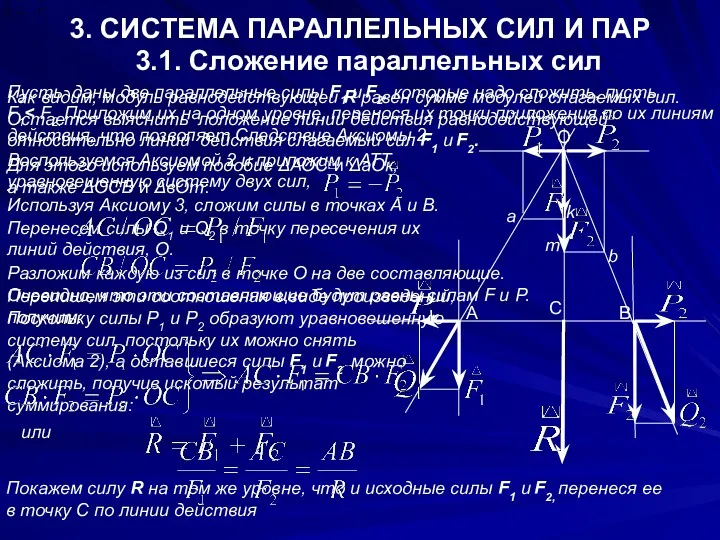 Система параллельных сил и пар
Система параллельных сил и пар