- Виды лагов

Содержание
- 2. Составные части буксируемого механического лага. Вращение передается лаглинем через маховик на счетчик, который показывает пройденное расстояние
- 3. Принципиальная схема гидродинамического лага. 1 – статическое отверстие. 2 – трубка приема давления. 3, 7 –
- 4. Индукционный лаг (ЛИ) - лаг, определяющий скорость судна в зависимости от электродвижущей силы, индуктируемой потоком воды,
- 5. Геоэлектромагнитный лаг - геомагнитный лаг, основанный на использовании явления наведения электродвижущей силы в проводнике при его
- 6. 1. В зависимости от выбранной опорной системы координат, относительно которой происходит измерение скорости: - абсолютные лаги;
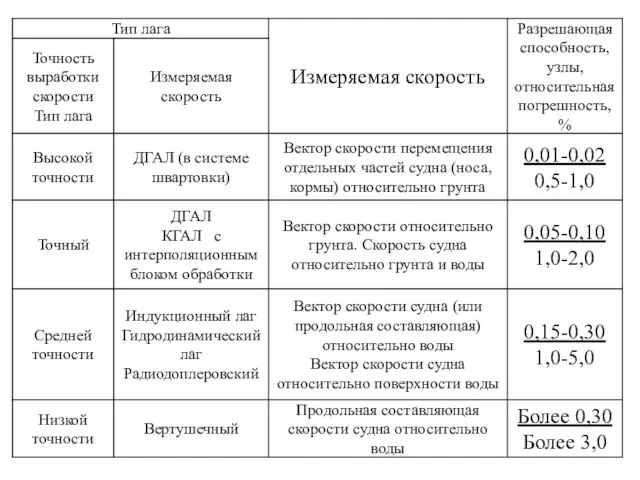
- 7. 3. В зависимости от точности измерения скорости: - высокой точности для обеспечения швартовки судна и выполнения
- 9. Измерители скорости -Индукционные лаги; -Доплеровские лаги; -Корреляционные лаги.
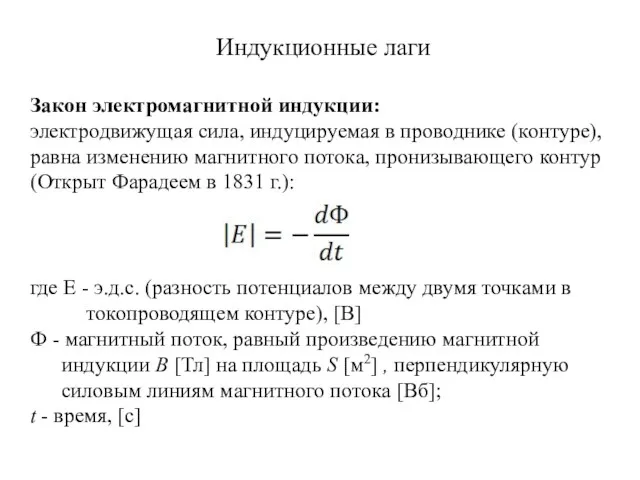
- 10. Индукционные лаги Закон электромагнитной индукции: электродвижущая сила, индуцируемая в проводнике (контуре), равна изменению магнитного потока, пронизывающего
- 11. ЭДС индукции в движущихся проводниках При движении проводника в магнитном поле со скоростью V, вместе с
- 12. Э.д.с. равна скорости изменения магнитного потока Ф через поверхность, ограниченную этим контуром. В общем случае имеем:
- 13. Однако, во-первых, под действием силы Лоренца ионы одного знака оказываются на площади S в непосредственной близости
- 14. Во-вторых, возникшие при движении судна положительно и отрицательно заряженные зоны участка S притягивают из окружающей воды
- 15. Вследствие возникновения явления поляризации постоянное магнитное поле в индукционных лагах не применяется, так как накопление электрических
- 16. Индукционный преобразователь с переменным электромагнитом 1 - стойка прибора; 2 – электрод для замера сопро- тивления
- 17. Образование квадратурной помехи В проводниках, находящихся под действием переменного магнитного потока наводится ЭДС. Морские воды представляют
- 18. Так как электромагнит запитывается напряжением Uпит частой 50 Гц, то: измеряемая э. д. с. ω=2πf K1
- 19. Для измерения продо-льной Vx и поперечной Vу составляющих (ветровой дрейф α ) судна ИП снабжают двумя
- 20. U13 + U24 = 2K1Vx; U13 – U24 = 2K2Vу
- 21. Структурная схема индукционного лага
- 22. Погрешности измерения скорости индукционным лагом 1. Погрешности измерительной схемы; 2. Погрешности чувствительного элемента; 3. Погрешности, обусловленные
- 23. Собственная ЭДС электродов связана с явлениями электролиза. На опущенных в морскую воду электродах происходят окислительно-восстановительные реакции,
- 24. Погрешности, обусловленные влиянием внешней среды Погрешности вызваны: 1. Изменением солености морской воды; 2. Местом установки приемного
- 25. 3. Статический крен и дифферент (особенно) вызывают значительную погрешность в показаниях лага. В результате крена или
- 27. Скачать презентацию

Составные части буксируемого механического лага. Вращение передается лаглинем через маховик на
Составные части буксируемого механического лага. Вращение передается лаглинем через маховик на
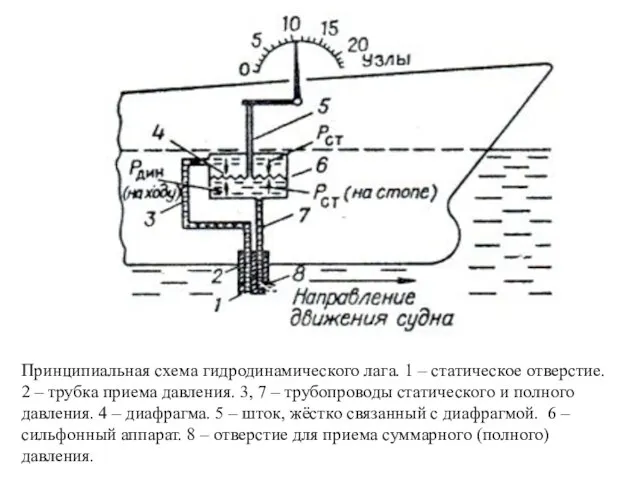
Принципиальная схема гидродинамического лага. 1 – статическое отверстие. 2 – трубка
Принципиальная схема гидродинамического лага. 1 – статическое отверстие. 2 – трубка
Индукционный лаг (ЛИ) - лаг, определяющий скорость судна в зависимости от
Индукционный лаг (ЛИ) - лаг, определяющий скорость судна в зависимости от
Геоэлектромагнитный лаг - геомагнитный лаг, основанный на использовании явления наведения электродвижущей
Геоэлектромагнитный лаг - геомагнитный лаг, основанный на использовании явления наведения электродвижущей
1. В зависимости от выбранной опорной системы координат, относительно которой происходит
1. В зависимости от выбранной опорной системы координат, относительно которой происходит
3. В зависимости от точности измерения скорости:
- высокой точности для
3. В зависимости от точности измерения скорости:
- высокой точности для
Измерители скорости
-Индукционные лаги;
-Доплеровские лаги;
-Корреляционные лаги.
Измерители скорости
-Индукционные лаги;
-Доплеровские лаги;
-Корреляционные лаги.
Индукционные лаги
Закон электромагнитной индукции:
электродвижущая сила, индуцируемая в проводнике (контуре), равна изменению
Индукционные лаги
Закон электромагнитной индукции:
электродвижущая сила, индуцируемая в проводнике (контуре), равна изменению
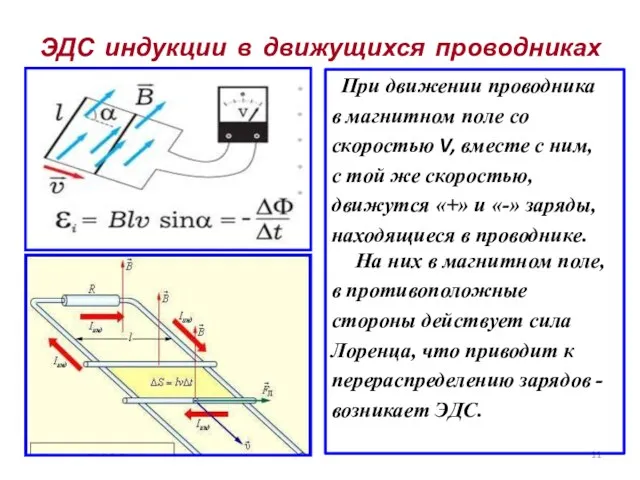
ЭДС индукции в движущихся проводниках
При движении проводника
в магнитном поле со
скоростью
ЭДС индукции в движущихся проводниках
При движении проводника
в магнитном поле со
скоростью
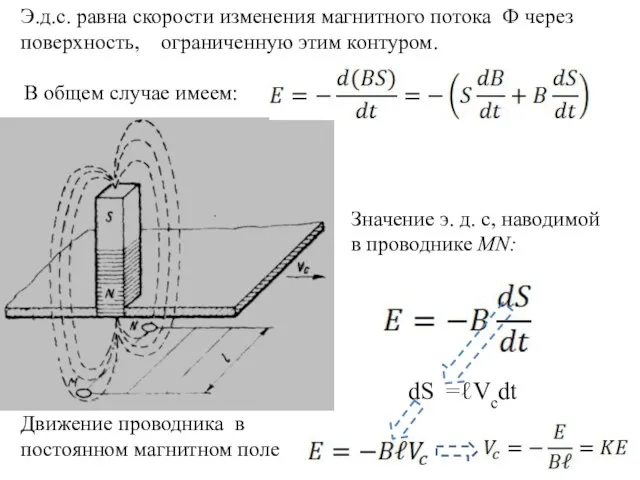
Э.д.с. равна скорости изменения магнитного потока Ф через поверхность, ограниченную этим
Э.д.с. равна скорости изменения магнитного потока Ф через поверхность, ограниченную этим
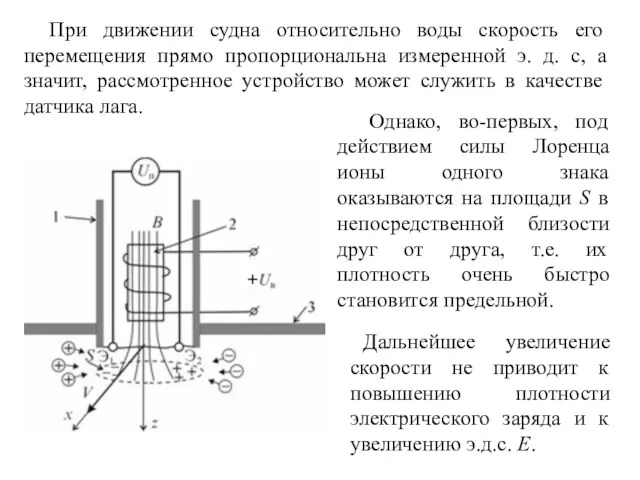
Однако, во-первых, под действием силы Лоренца ионы одного знака оказываются на
Однако, во-первых, под действием силы Лоренца ионы одного знака оказываются на
Во-вторых, возникшие при движении судна положительно и отрицательно заряженные зоны участка
Во-вторых, возникшие при движении судна положительно и отрицательно заряженные зоны участка
Вследствие возникновения явления поляризации постоянное магнитное поле в индукционных лагах не
Вследствие возникновения явления поляризации постоянное магнитное поле в индукционных лагах не
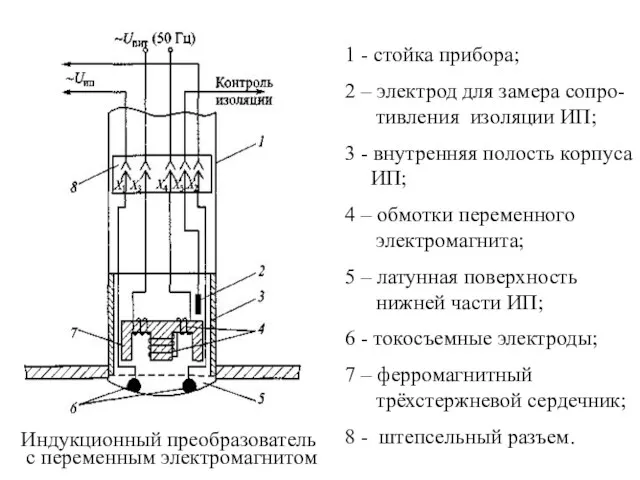
Индукционный преобразователь
с переменным электромагнитом
1 - стойка прибора;
2 – электрод для
Индукционный преобразователь
с переменным электромагнитом
1 - стойка прибора;
2 – электрод для
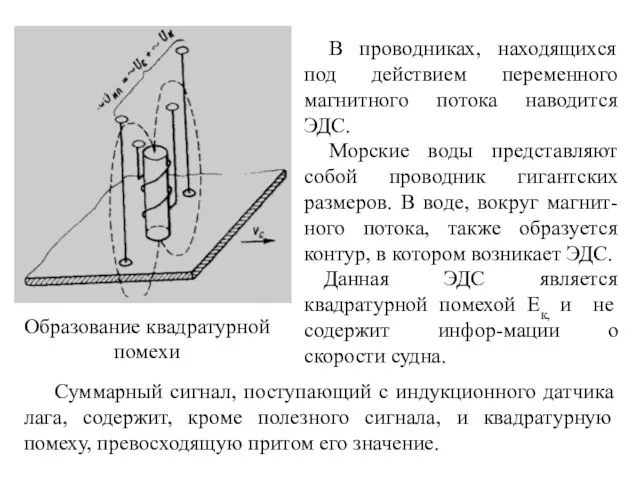
Образование квадратурной помехи
В проводниках, находящихся под действием переменного магнитного потока наводится
Образование квадратурной помехи
В проводниках, находящихся под действием переменного магнитного потока наводится
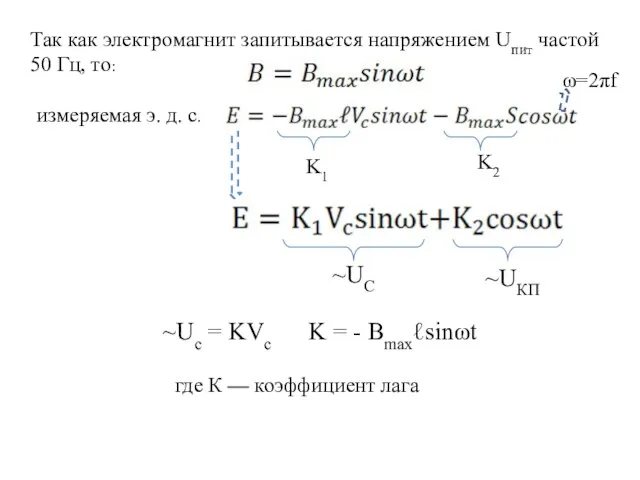
Так как электромагнит запитывается напряжением Uпит частой 50 Гц, то:
измеряемая э.
Так как электромагнит запитывается напряжением Uпит частой 50 Гц, то:
измеряемая э.
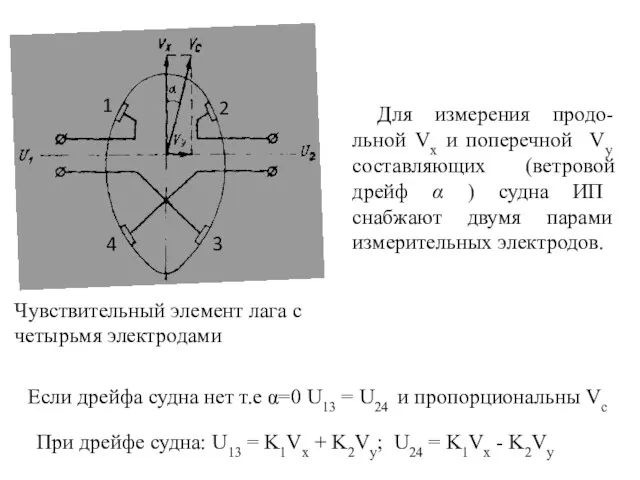
Для измерения продо-льной Vx и поперечной Vу составляющих (ветровой дрейф α
Для измерения продо-льной Vx и поперечной Vу составляющих (ветровой дрейф α
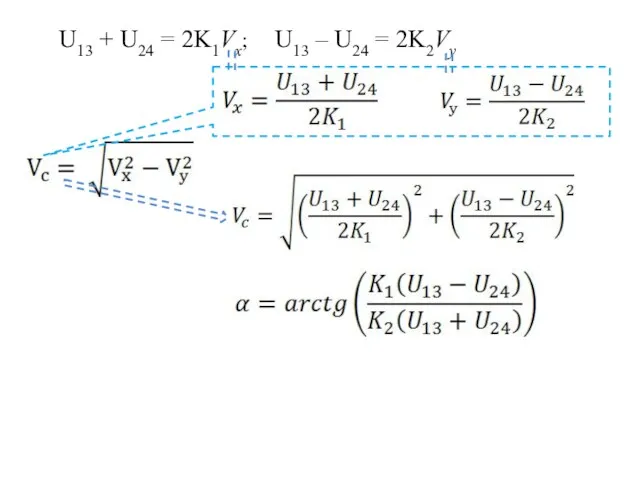
U13 + U24 = 2K1Vx; U13 – U24 = 2K2Vу
U13 + U24 = 2K1Vx; U13 – U24 = 2K2Vу
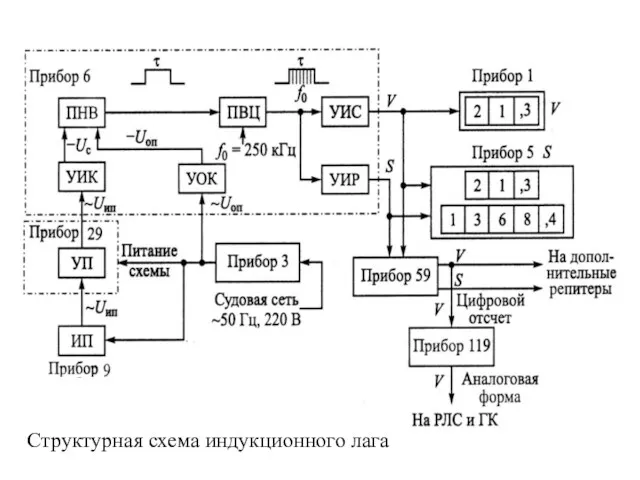
Структурная схема индукционного лага
Структурная схема индукционного лага
Погрешности измерения скорости индукционным лагом
1. Погрешности измерительной схемы;
2. Погрешности чувствительного элемента;
3.
Погрешности измерения скорости индукционным лагом
1. Погрешности измерительной схемы;
2. Погрешности чувствительного элемента;
3.
Собственная ЭДС электродов связана с явлениями электролиза. На опущенных в морскую
Собственная ЭДС электродов связана с явлениями электролиза. На опущенных в морскую
Погрешности, обусловленные влиянием внешней среды
Погрешности вызваны:
1. Изменением солености морской воды;
2. Местом
Погрешности, обусловленные влиянием внешней среды
Погрешности вызваны:
1. Изменением солености морской воды;
2. Местом
3. Статический крен и дифферент (особенно) вызывают значительную погрешность в показаниях
3. Статический крен и дифферент (особенно) вызывают значительную погрешность в показаниях
 Introduction to Quantum Mechanic
Introduction to Quantum Mechanic Replacement of Dryer
Replacement of Dryer Организация технического обслуживания и ремонта электрического и электромеханического оборудования
Организация технического обслуживания и ремонта электрического и электромеханического оборудования Sunlight and space travel
Sunlight and space travel Теплотехника Техническая термодинамика и теплопередача
Теплотехника Техническая термодинамика и теплопередача Влияние мобильного телефона на здоровье школьника
Влияние мобильного телефона на здоровье школьника Открытие и применение закона всемирного тяготения
Открытие и применение закона всемирного тяготения Фізичні та хімічні явища
Фізичні та хімічні явища Как стать миллионером знаний по атомной физике?
Как стать миллионером знаний по атомной физике? Композиты - древний материал будущего
Композиты - древний материал будущего Іонізаційний метод індикації
Іонізаційний метод індикації Конструктивное исполнение 2-х и 4-х тактных дизелей
Конструктивное исполнение 2-х и 4-х тактных дизелей Теорема Гаусса для вектора магнитной индукции
Теорема Гаусса для вектора магнитной индукции Подготовка к ГИА по физике 2013
Подготовка к ГИА по физике 2013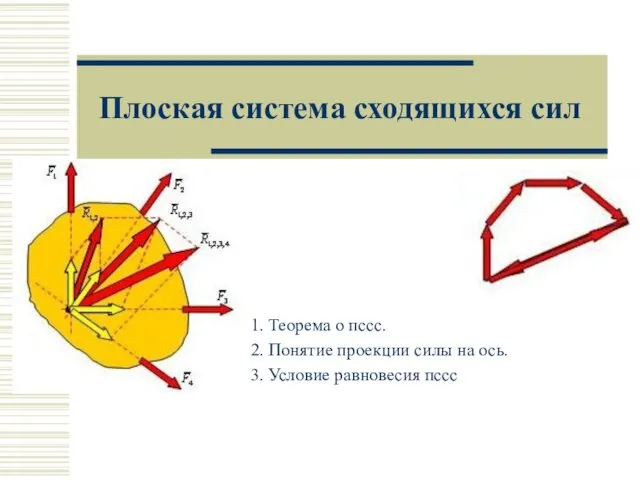 Плоская система сходящихся сил
Плоская система сходящихся сил Ядро. Ядерные силы
Ядро. Ядерные силы Электрические машины постоянного тока
Электрические машины постоянного тока Индикаторы. Промышленные регуляторы
Индикаторы. Промышленные регуляторы Химическая кинетика. Лекция 9
Химическая кинетика. Лекция 9 Силы, действующие на мотоцикл
Силы, действующие на мотоцикл Урок физики в 7 классе Вес воздуха. Атмосферное давление
Урок физики в 7 классе Вес воздуха. Атмосферное давление Основы слесарно-сборочных и электромонтажных работ. Обязанности электромонтера по ремонту и обслуживанию электрооборудования
Основы слесарно-сборочных и электромонтажных работ. Обязанности электромонтера по ремонту и обслуживанию электрооборудования Распределительное устройство 10 кВ
Распределительное устройство 10 кВ Схематизация опор. Определение реакций
Схематизация опор. Определение реакций Магнитное поле в веществе. Система уравнений Максвелла. Тема 18
Магнитное поле в веществе. Система уравнений Максвелла. Тема 18 Ажырамалы қосылыстар
Ажырамалы қосылыстар Полупроводниковые выпрямители. Лекция15
Полупроводниковые выпрямители. Лекция15 Исследование напряженного состояния в точке тела. Тема 7
Исследование напряженного состояния в точке тела. Тема 7