- Загальні поняття про системи автоматичного керування

Содержание
- 2. План 1. Загальні відомості та визначення теорії систем автоматичного керування 2. Класифікація елементів. що входять до
- 3. Вступ Наукова дисципліна “Теорія автоматичного керування” (ТАК) вивчає закони керування в технічних системах, розробляє методи аналізу
- 4. Завданнями ТАК такі: - збір та аналіз інформації про властивості САК і умови їх використання; -
- 5. Розвиток теорії автоматичного керування почався з 30-х років ХХ ст., коли були відкриті закони регулювання та
- 6. - Засоби автоматики й телемеханіки. - Системи автоматичного керування (САК). - Автоматизовані системи керування (АСУ). Засоби
- 7. Вивчає закони керування в технічних системах, розробляє методи аналізу та синтезу (побудови) систем автоматичного керування (САК).
- 8. Основні поняття теорії автоматичного керування Алгоритм – упорядкована сукупність правил, точне виконання яких приводить до потрібного
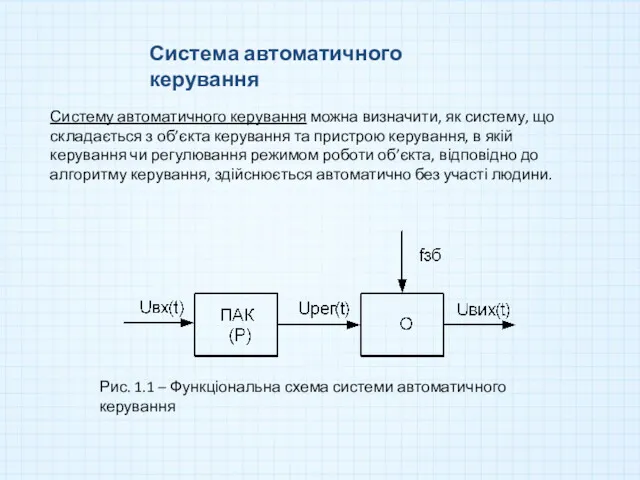
- 9. Система автоматичного керування Систему автоматичного керування можна визначити, як систему, що складається з об’єкта керування та
- 10. З об’єкта керування (ОК), керування режимом роботи якого здійснюється за допомогою пристрою автоматичного керування (ПАК). Стрілками
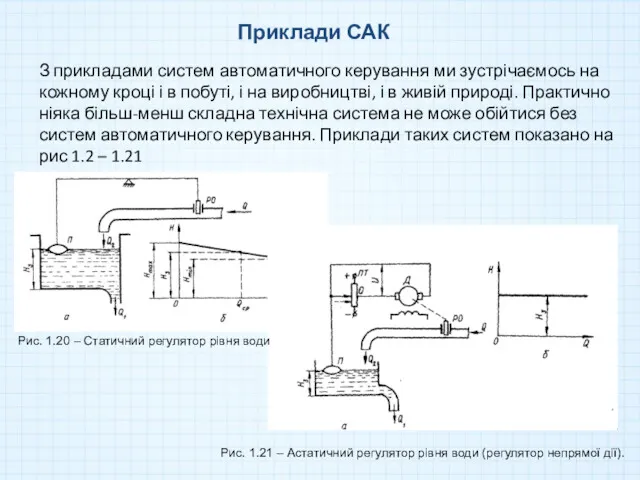
- 11. Приклади САК З прикладами систем автоматичного керування ми зустрічаємось на кожному кроці і в побуті, і
- 12. Регулятор рівня води схематично показаний на рис. 1.20. Тут об’єктом керування є бак, в якому підтримується
- 13. Візьмемо побутову техніку. Холодильник, електричний утюг, радіоприймач, магнітофон, телевізор. Вся ця та інша техніка має у
- 14. Приклади САК Холодильник (див. рис. 1.2) забезпечує постійну температуру продуктів. Алгоритмом його функціонування є підтриманні постійної
- 15. Рис. 1.2 – Регулятор температури в холодильнику.
- 16. 2. Класифікація елементів. що входять до складу систем автоматичного керування В загальному випадку виділяють два елементи:
- 18. Скачать презентацию
План
1. Загальні відомості та визначення теорії систем автоматичного керування
2. Класифікація елементів.
План
1. Загальні відомості та визначення теорії систем автоматичного керування
2. Класифікація елементів.
Вступ
Наукова дисципліна “Теорія автоматичного керування” (ТАК) вивчає закони керування в технічних
Вступ
Наукова дисципліна “Теорія автоматичного керування” (ТАК) вивчає закони керування в технічних
Завданнями ТАК такі:
- збір та аналіз інформації про властивості САК і
- збір та аналіз інформації про властивості САК і

Розвиток теорії автоматичного керування почався з 30-х років ХХ ст.,
Розвиток теорії автоматичного керування почався з 30-х років ХХ ст.,
- Засоби автоматики й телемеханіки.
- Системи автоматичного керування (САК).
- Засоби автоматики й телемеханіки.
- Системи автоматичного керування (САК).
Вивчає закони керування в технічних системах, розробляє методи аналізу та синтезу
Вивчає закони керування в технічних системах, розробляє методи аналізу та синтезу
Основні поняття теорії автоматичного керування
Алгоритм – упорядкована сукупність правил, точне виконання
Основні поняття теорії автоматичного керування
Алгоритм – упорядкована сукупність правил, точне виконання
Система автоматичного керування
Систему автоматичного керування можна визначити, як систему, що
Система автоматичного керування
Систему автоматичного керування можна визначити, як систему, що
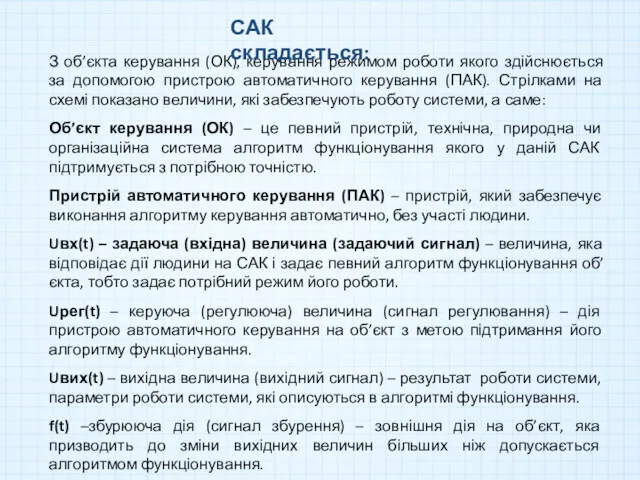
З об’єкта керування (ОК), керування режимом роботи якого здійснюється за допомогою
З об’єкта керування (ОК), керування режимом роботи якого здійснюється за допомогою
Приклади САК
З прикладами систем автоматичного керування ми зустрічаємось на кожному кроці
Приклади САК
З прикладами систем автоматичного керування ми зустрічаємось на кожному кроці
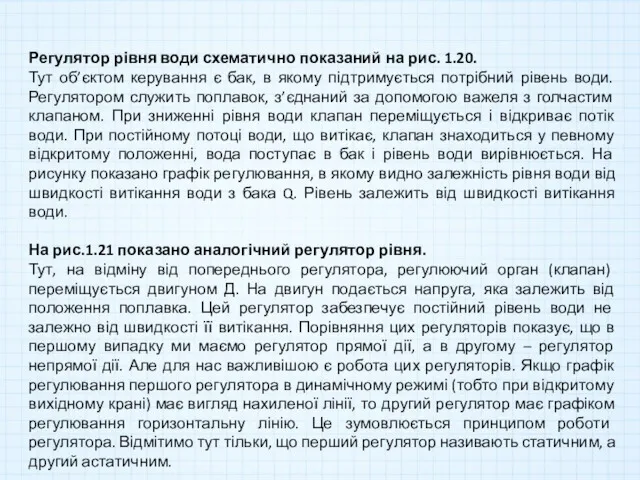
Регулятор рівня води схематично показаний на рис. 1.20.
Тут об’єктом керування
Регулятор рівня води схематично показаний на рис. 1.20.
Тут об’єктом керування
Візьмемо побутову техніку. Холодильник, електричний утюг, радіоприймач, магнітофон, телевізор. Вся ця
Візьмемо побутову техніку. Холодильник, електричний утюг, радіоприймач, магнітофон, телевізор. Вся ця
Приклади САК
Холодильник (див. рис. 1.2) забезпечує постійну температуру продуктів.
Алгоритмом його
Приклади САК
Холодильник (див. рис. 1.2) забезпечує постійну температуру продуктів.
Алгоритмом його
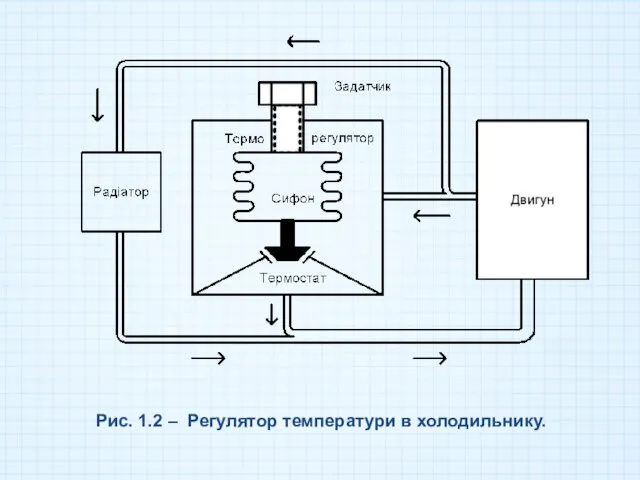
Рис. 1.2 – Регулятор температури в холодильнику.
Рис. 1.2 – Регулятор температури в холодильнику.
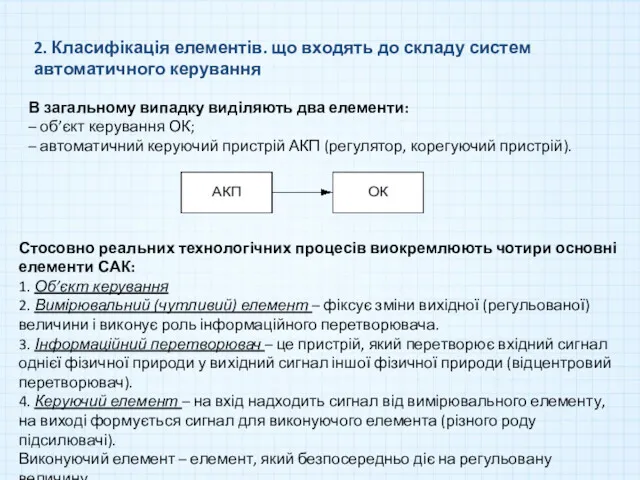
2. Класифікація елементів. що входять до складу систем автоматичного керування
В загальному
2. Класифікація елементів. що входять до складу систем автоматичного керування
В загальному
Похожие презентации
 Дисперсия света
Дисперсия света
 Дозиметрия ионизирующих излучений. Влияние радиации на организм человека
Дозиметрия ионизирующих излучений. Влияние радиации на организм человека Теорема Остроградского-Гаусса
Теорема Остроградского-Гаусса Сила тяжести на других планетах. Физические характеристики планет (закон всемирного тяготения)
Сила тяжести на других планетах. Физические характеристики планет (закон всемирного тяготения) Активні компоненти
Активні компоненти Газовые законы — повторительно-обобщающий урок
Газовые законы — повторительно-обобщающий урок Архимедова сила. Урок физики в 7 классе
Архимедова сила. Урок физики в 7 классе 8 нче сыйныф укучылары өчен физик кичә Чәй табыны янында
8 нче сыйныф укучылары өчен физик кичә Чәй табыны янында Клиновые и зубчатые ремни. Характеристики продукта
Клиновые и зубчатые ремни. Характеристики продукта Презентация Электрическая цепь и ее составные части
Презентация Электрическая цепь и ее составные части Давление света
Давление света Определение теплоёмкости металла, алюминия, железа, латуни
Определение теплоёмкости металла, алюминия, железа, латуни Презентация к уроку Колебания
Презентация к уроку Колебания Закон Ома
Закон Ома Создание источника электричества из овощей и фруктов
Создание источника электричества из овощей и фруктов Великие физики
Великие физики Конвективный теплообмен в однофазных средах (продолжение 4)
Конвективный теплообмен в однофазных средах (продолжение 4) Явления переноса. Лекция № 16
Явления переноса. Лекция № 16 Общие сведения и классификация трансформатора. (Тема 4)
Общие сведения и классификация трансформатора. (Тема 4) Презентация по физике Световые явления для 8 класса
Презентация по физике Световые явления для 8 класса Кинематика роботов. Кинематические схемы. (Лекция 2.1)
Кинематика роботов. Кинематические схемы. (Лекция 2.1) Молекулярная абсорбционная спектрометрия. Фотометрические методы анализа
Молекулярная абсорбционная спектрометрия. Фотометрические методы анализа Градуировка спектроскопа
Градуировка спектроскопа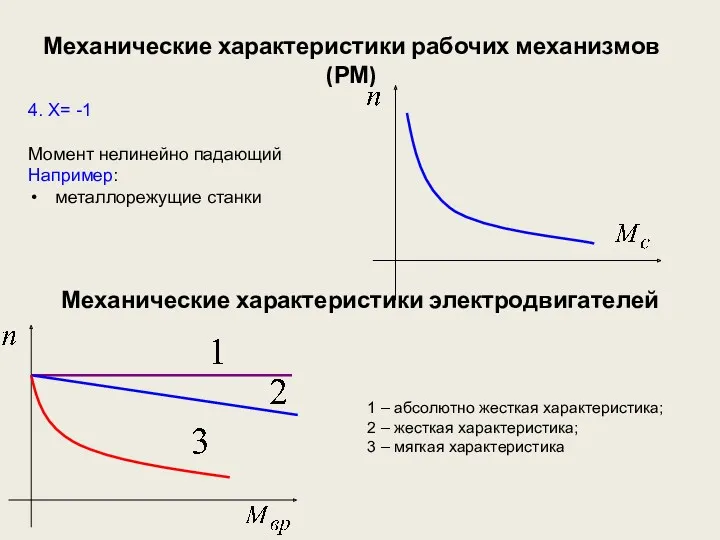 Механические характеристики производственных механизмов и электрических двигателей. Лекция 2
Механические характеристики производственных механизмов и электрических двигателей. Лекция 2 Решение сказочных задач. Физика
Решение сказочных задач. Физика Керамические материалы
Керамические материалы Физика горных пород и процессов
Физика горных пород и процессов