- Законы автоматического регулирования

Содержание
- 2. Законы автоматического регулирования Позиционные (2-х и 3-х) (Поз) Пропорциональный (П) Интегральный (И) Пропорционально-интегральный (ПИ) Пропорционально-дифференциальный (ПД)
- 3. Законы автоматического регулирования Позиционное регулирование При позиционном регулировании регулятор в зависимости от текущего значения регулируемого параметра
- 4. Законы автоматического регулирования Двухпозиционное регулирование Математическая формулировка идеального (без зоны нечувствительности) двухпозиционного закона регулирования имеет вид:
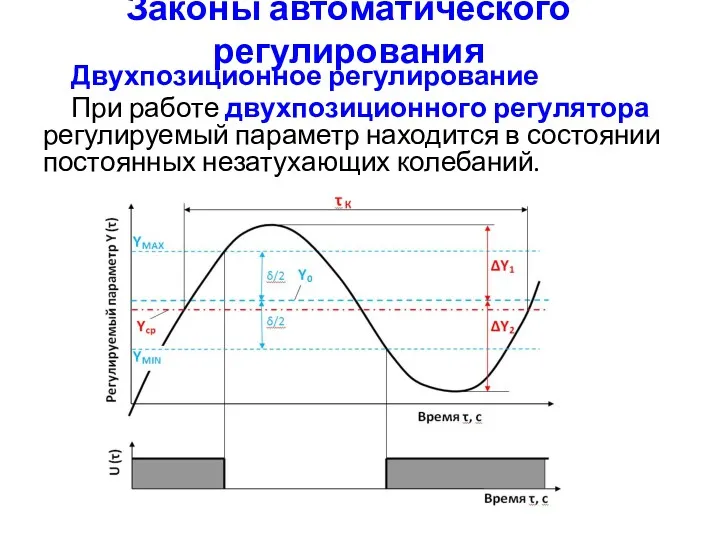
- 5. Законы автоматического регулирования Двухпозиционное регулирование При работе двухпозиционного регулятора регулируемый параметр находится в состоянии постоянных незатухающих
- 6. Законы автоматического регулирования Двухпозиционное регулирование Параметры настройки двухпозиционного регулятора: уставка y0 (заданное значение регулируемого параметра) уровни
- 7. Законы автоматического регулирования Двухпозиционное регулирование Качество двухпозиционного регулирования характеризуется периодом колебаний τК амплитудой А А =
- 8. Трехпозиционное регулирование При трехпозиционном регулировании используют обычно два выходных реле регулятора. Три уровня воздействия на объект
- 9. Трехпозиционное регулирование
- 10. Трехпозиционное регулирование Параметрами настройки трехпозиционного регулятора являются: уставка (на рисунке – Туст); уровни регулирующего воздействия (UМАКС
- 11. Трехпозиционное регулирование Качество позиционного регулирования характеризуется периодом колебаний τК, амплитудой А, и условной статической ошибкой регулирования
- 12. Законы автоматического регулирования Пропорциональный закон регулирования При пропорциональном законе регулирующее воздействие u (τ) прямо пропорционально рассогласованию
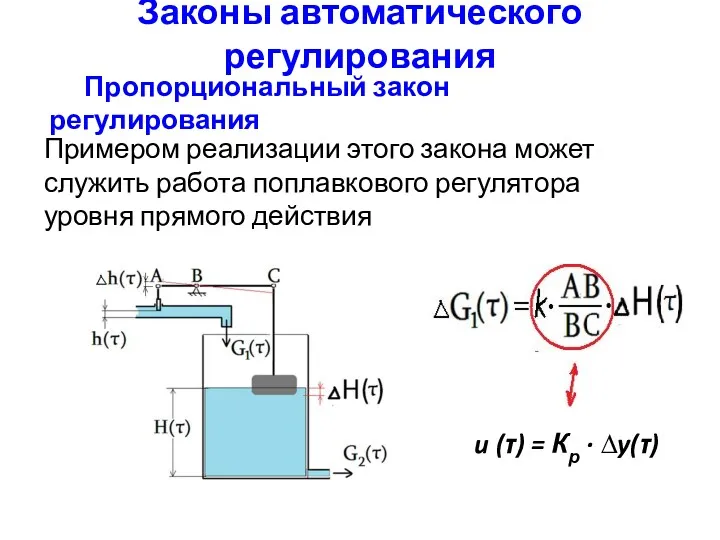
- 13. Законы автоматического регулирования Пропорциональный закон регулирования Примером реализации этого закона может служить работа поплавкового регулятора уровня
- 14. Законы автоматического регулирования Пропорциональный закон регулирования Для работы пропорционального регулятора характерно: Наличие статической ошибки регулирования (
- 15. Законы автоматического регулирования Интегральный закон регулирования При интегральном законе регулирующее воздействие прямо пропорционально интегралу рассогласования по
- 16. Законы автоматического регулирования Интегральный закон регулирования Для работы И-регулятора характерно : Отсутствие статической ошибки регулирования (∆yСТ
- 17. Законы автоматического регулирования Пропорционально-интегральный закон регулирования Пропорционально-интегральный (ПИ) закон регулирования является комбинацией П- и И-законов: u
- 18. Законы автоматического регулирования Пропорционально-интегральный закон регулирования Для работы ПИ-регулятора характерно: Отсутствие статической ошибки регулирования ( ∆yСТ
- 19. Законы автоматического регулирования Пропорционально-интегрально-дифференциальный закон регулирования Наиболее сложным законом регулирования является пропорционально-интегрально-дифференциальный (ПИД), который описывается выражением
- 20. Законы автоматического регулирования Пропорционально-интегрально-дифференциальный закон регулирования ПИД-регулятор имеет три параметра настройки: КР - коэффициент передачи регулятора;
- 22. Скачать презентацию
Законы автоматического регулирования
Позиционные (2-х и 3-х) (Поз)
Пропорциональный (П)
Интегральный (И)
Пропорционально-интегральный (ПИ)
Пропорционально-дифференциальный (ПД)
Пропорционально-интегрально-дифференциальный (ПИД)
В практике
Законы автоматического регулирования
Позиционные (2-х и 3-х) (Поз)
Пропорциональный (П)
Интегральный (И)
Пропорционально-интегральный (ПИ)
Пропорционально-дифференциальный (ПД)
Пропорционально-интегрально-дифференциальный (ПИД)
В практике
Законы автоматического регулирования
Позиционное регулирование
При позиционном регулировании регулятор в зависимости от текущего
Законы автоматического регулирования
Позиционное регулирование
При позиционном регулировании регулятор в зависимости от текущего
Законы автоматического регулирования
Двухпозиционное регулирование
Математическая формулировка идеального (без зоны нечувствительности) двухпозиционного закона
Законы автоматического регулирования
Двухпозиционное регулирование
Математическая формулировка идеального (без зоны нечувствительности) двухпозиционного закона
Законы автоматического регулирования
Двухпозиционное регулирование
При работе двухпозиционного регулятора регулируемый параметр находится в
Законы автоматического регулирования
Двухпозиционное регулирование
При работе двухпозиционного регулятора регулируемый параметр находится в
Законы автоматического регулирования
Двухпозиционное регулирование
Параметры настройки двухпозиционного регулятора:
уставка y0 (заданное значение регулируемого
Законы автоматического регулирования
Двухпозиционное регулирование
Параметры настройки двухпозиционного регулятора:
уставка y0 (заданное значение регулируемого
Законы автоматического регулирования
Двухпозиционное регулирование
Качество двухпозиционного регулирования характеризуется
периодом колебаний τК
амплитудой
Законы автоматического регулирования
Двухпозиционное регулирование
Качество двухпозиционного регулирования характеризуется
периодом колебаний τК
амплитудой
Трехпозиционное регулирование
При трехпозиционном регулировании используют обычно два выходных реле регулятора. Три
Трехпозиционное регулирование
При трехпозиционном регулировании используют обычно два выходных реле регулятора. Три
Трехпозиционное регулирование
Трехпозиционное регулирование
Трехпозиционное регулирование
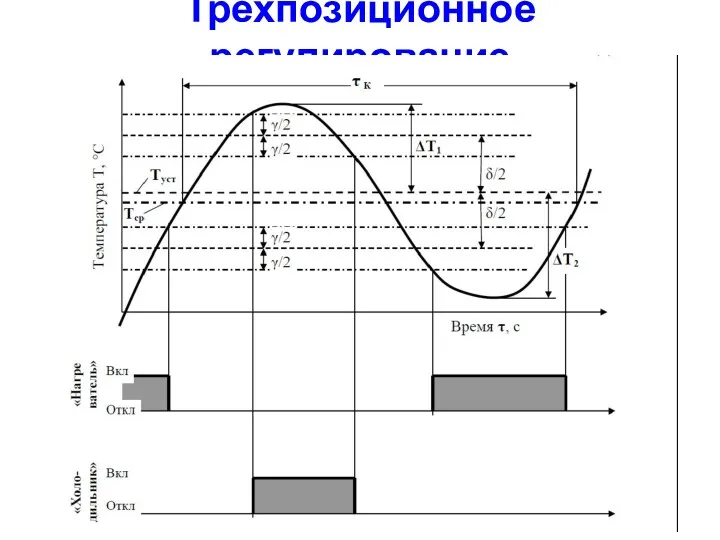
Параметрами настройки трехпозиционного регулятора являются:
уставка (на рисунке – Туст);
уровни
Трехпозиционное регулирование
Параметрами настройки трехпозиционного регулятора являются:
уставка (на рисунке – Туст);
уровни
Трехпозиционное регулирование
Качество позиционного регулирования характеризуется периодом колебаний τК, амплитудой А, и
Трехпозиционное регулирование
Качество позиционного регулирования характеризуется периодом колебаний τК, амплитудой А, и
Законы автоматического регулирования
Пропорциональный закон регулирования
При пропорциональном законе регулирующее воздействие u (τ)
Законы автоматического регулирования
Пропорциональный закон регулирования
При пропорциональном законе регулирующее воздействие u (τ)
Законы автоматического регулирования
Пропорциональный закон регулирования
Примером реализации этого закона может служить работа
Законы автоматического регулирования
Пропорциональный закон регулирования
Примером реализации этого закона может служить работа
Законы автоматического регулирования
Пропорциональный закон регулирования
Для работы пропорционального регулятора характерно:
Наличие
Законы автоматического регулирования
Пропорциональный закон регулирования
Для работы пропорционального регулятора характерно:
Наличие
Законы автоматического регулирования
Интегральный закон регулирования
При интегральном законе регулирующее воздействие
Законы автоматического регулирования
Интегральный закон регулирования
При интегральном законе регулирующее воздействие
Законы автоматического регулирования
Интегральный закон регулирования
Для работы И-регулятора характерно :
Законы автоматического регулирования
Интегральный закон регулирования
Для работы И-регулятора характерно :
Законы автоматического регулирования
Пропорционально-интегральный закон регулирования
Пропорционально-интегральный (ПИ) закон регулирования является комбинацией П-
Законы автоматического регулирования
Пропорционально-интегральный закон регулирования
Пропорционально-интегральный (ПИ) закон регулирования является комбинацией П-
Законы автоматического регулирования
Пропорционально-интегральный закон регулирования
Для работы ПИ-регулятора характерно:
Отсутствие статической ошибки
Законы автоматического регулирования
Пропорционально-интегральный закон регулирования
Для работы ПИ-регулятора характерно:
Отсутствие статической ошибки
Законы автоматического регулирования
Пропорционально-интегрально-дифференциальный закон регулирования
Наиболее сложным законом регулирования является пропорционально-интегрально-дифференциальный (ПИД),
Законы автоматического регулирования
Пропорционально-интегрально-дифференциальный закон регулирования
Наиболее сложным законом регулирования является пропорционально-интегрально-дифференциальный (ПИД),
Законы автоматического регулирования
Пропорционально-интегрально-дифференциальный закон регулирования
ПИД-регулятор имеет три параметра настройки:
КР
Законы автоматического регулирования
Пропорционально-интегрально-дифференциальный закон регулирования
ПИД-регулятор имеет три параметра настройки:
КР
 Техническое обслуживание и текущий ремонт двигателя, системы охлаждения и смазки автомобиля
Техническое обслуживание и текущий ремонт двигателя, системы охлаждения и смазки автомобиля Кипение
Кипение ИКТ на уроках физики
ИКТ на уроках физики Физические явления
Физические явления Линзы. Построение изображений в линзах
Линзы. Построение изображений в линзах Предмет радиотеоэкологии. Цель и задачи радиотеоэкологии
Предмет радиотеоэкологии. Цель и задачи радиотеоэкологии Електричне коло та його елементи
Електричне коло та його елементи Электрическое поле, его характеристики. Поле диполя. Электропроводность металлов, электролитов, газов. (Практическое занятие 7)
Электрическое поле, его характеристики. Поле диполя. Электропроводность металлов, электролитов, газов. (Практическое занятие 7) Силы в механике
Силы в механике Поляризация света
Поляризация света Занятие № 1 Методы повышения эффективности усвоения понятийпри изучении темы:Кинематика
Занятие № 1 Методы повышения эффективности усвоения понятийпри изучении темы:Кинематика Величины, характеризующие колебательное движение
Величины, характеризующие колебательное движение Фізичні та хімічні явища
Фізичні та хімічні явища Ядерная гамма-резонансная спектроскопия
Ядерная гамма-резонансная спектроскопия Сырмалы, сырмалы-шөмішті, шөмішті және сөрелі конвейерлер
Сырмалы, сырмалы-шөмішті, шөмішті және сөрелі конвейерлер Химия функциональных материалов. Материалы используемые для электротехники
Химия функциональных материалов. Материалы используемые для электротехники Охлаждение, нагревание тел конечных размеров. Нагрев параллелепипеда
Охлаждение, нагревание тел конечных размеров. Нагрев параллелепипеда Масса молекул. Количество вещества
Масса молекул. Количество вещества University physics. Forces review of basic concepts
University physics. Forces review of basic concepts Понятие о машине и механизме
Понятие о машине и механизме Вимірювання сили, маси, крутного моменту, нахилу і прискорення
Вимірювання сили, маси, крутного моменту, нахилу і прискорення Гибридные автомобили
Гибридные автомобили Электрический ток. Закон Ома для участка цепи. Смешанное соединение проводников
Электрический ток. Закон Ома для участка цепи. Смешанное соединение проводников Основные законы идеального газа. Лекция 4
Основные законы идеального газа. Лекция 4 Эксплуатация подъемников с электрогидравлическим, с гидравлическим приводом и канавных подъемников (урок 6-10)
Эксплуатация подъемников с электрогидравлическим, с гидравлическим приводом и канавных подъемников (урок 6-10) Ядролык гамма резонанс. Мёссбауэр эффектісі
Ядролык гамма резонанс. Мёссбауэр эффектісі Transformer
Transformer Гигиена труда с радиоактивными веществами и источниками ионизирующего излучения
Гигиена труда с радиоактивными веществами и источниками ионизирующего излучения