- Законы сохранения в механике

Содержание
- 2. 1. Закон сохранения импульса и реактивное движение Импульсом называют векторную величину, равную произведению массы тела на
- 3. При взаимодействии тел замкнутой системы полный импульс системы остается неизменным, т.е. внутренние силы не могут изменить
- 4. Реактивное движение Движение тела, возникающее вследствие отделения от него части его массы с некоторой скоростью, называют
- 5. Примеры реактивного движения Тепловой двигатель, в котором сила тяги, возникающая за счет реакции струи вылетающих раскаленных
- 6. Значение работ Циолковского для космонавтики Основоположником теории космических полетов является выдающийся русский ученый Циолковский (1857 -
- 7. 2. Работа и энергия Энергетические характеристики движения вводятся на основе понятия механической работы или работы силы.
- 8. Графическое определение работы Графически работа определяется по площади криволинейной фигуры под графиком Fs(x).
- 9. Растянутая пружина Направление внешней силы совпадает с направлением перемещения k – жесткость пружины. Зависимость модуля внешней
- 10. По площади треугольника на графике можно определить работу, совершенную внешней силой, приложенной к правому свободному концу
- 11. При поступательном движении тела, когда точки приложения всех сил совершают одинаковое перемещение, общая работа всех сил
- 12. Закон сохранения механической энергии Механическая энергия — это энергия, связанная с движением объекта или его положением,
- 13. Источники энергии Ветер Приливы и отливы морей и океанов Течение рек Животные Человек
- 14. Виды энергии 1. Кинетическая энергия - это энергия, которую тело имеет только при движении. Когда тело
- 15. 2. Потенциальная энергия - это величина, равная работе, которую должна совершить потенциальная сила, чтобы переместить тело
- 16. Формулы потенциальной энергии для разных видов сил 1. Для тела, взаимодействующего с Землей и находящегося на
- 17. Вывод закона сохранения механической энергии Механическая энергия консервативной механической системы сохраняется во времени, т.е. при отсутствии
- 18. Закон сохранения механической энергии При любых процессах, происходящих в системе тел, ее полная механическая энергия остается
- 19. 3. Мощность Работа силы, совершаемая в единицу времени, называется мощностью. Мощность N это физическая величина, равная
- 20. КПД простых механизмов Простые механизмы – это приспособления, изменяющие величину или направление приложенных к телу сил,
- 21. Виды механизмов 1. Рычаг: 2. Неподвижный блок: F1=F2 3. Подвижный блок: 4. Полиспаст (система блоков): 5.
- 23. Скачать презентацию
1. Закон сохранения импульса и реактивное движение
Импульсом называют векторную величину, равную
1. Закон сохранения импульса и реактивное движение
Импульсом называют векторную величину, равную
При взаимодействии тел замкнутой системы полный импульс системы остается неизменным, т.е.
При взаимодействии тел замкнутой системы полный импульс системы остается неизменным, т.е.
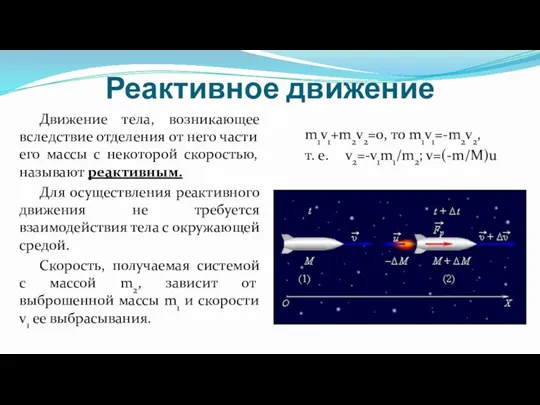
Реактивное движение
Движение тела, возникающее вследствие отделения от него части его массы
Реактивное движение
Движение тела, возникающее вследствие отделения от него части его массы
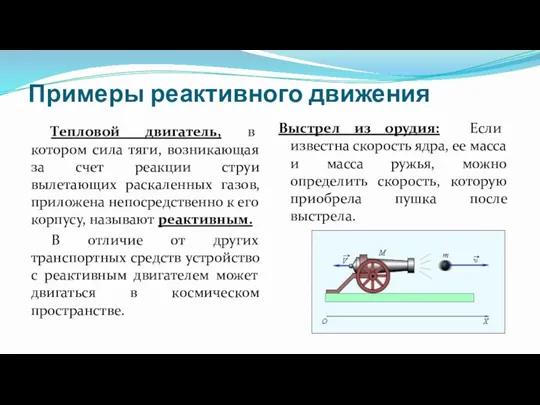
Примеры реактивного движения
Тепловой двигатель, в котором сила тяги, возникающая за счет
Примеры реактивного движения
Тепловой двигатель, в котором сила тяги, возникающая за счет
Значение работ Циолковского для космонавтики
Основоположником теории космических полетов является выдающийся русский
Значение работ Циолковского для космонавтики
Основоположником теории космических полетов является выдающийся русский
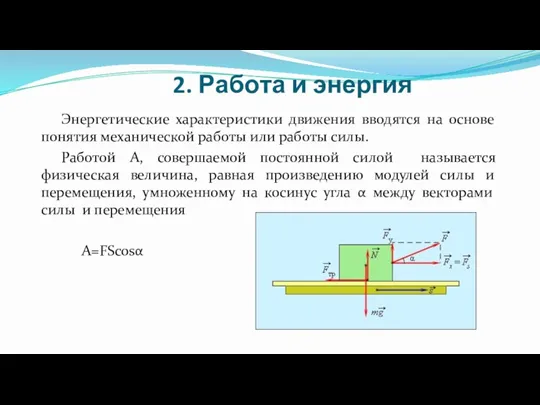
2. Работа и энергия
Энергетические характеристики движения вводятся на основе понятия механической
2. Работа и энергия
Энергетические характеристики движения вводятся на основе понятия механической
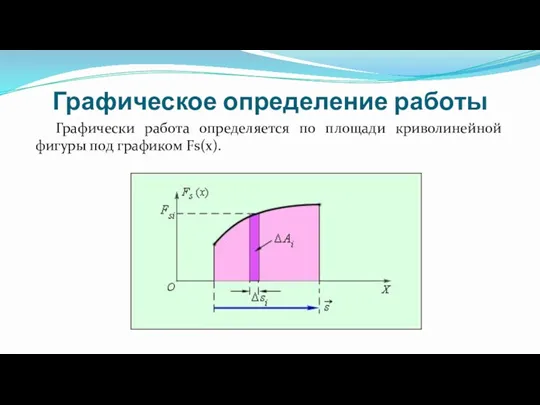
Графическое определение работы
Графически работа определяется по площади криволинейной фигуры под графиком
Графическое определение работы
Графически работа определяется по площади криволинейной фигуры под графиком
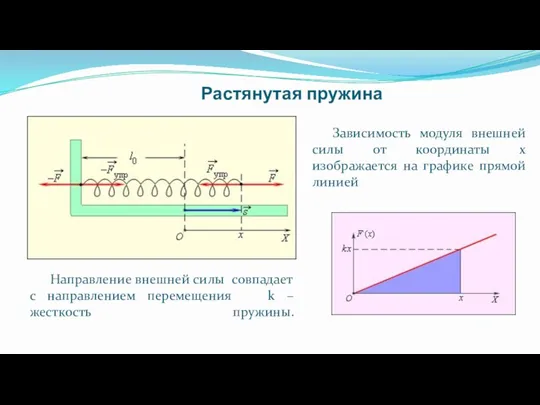
Растянутая пружина
Направление внешней силы совпадает с направлением перемещения k – жесткость
Растянутая пружина
Направление внешней силы совпадает с направлением перемещения k – жесткость
По площади треугольника на графике можно определить работу, совершенную внешней силой,
По площади треугольника на графике можно определить работу, совершенную внешней силой,
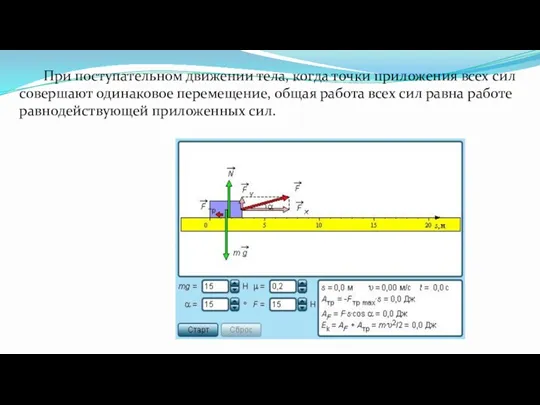
При поступательном движении тела, когда точки приложения всех сил совершают
При поступательном движении тела, когда точки приложения всех сил совершают

Закон сохранения механической энергии
Механическая энергия — это энергия, связанная с движением
Закон сохранения механической энергии
Механическая энергия — это энергия, связанная с движением

Источники энергии
Ветер
Приливы и отливы
морей и океанов
Течение рек Животные
Человек
Источники энергии
Ветер
Приливы и отливы
морей и океанов
Течение рек Животные
Человек
Виды энергии
1. Кинетическая энергия - это энергия, которую тело имеет только
Виды энергии
1. Кинетическая энергия - это энергия, которую тело имеет только
2. Потенциальная энергия - это величина, равная работе, которую должна совершить
2. Потенциальная энергия - это величина, равная работе, которую должна совершить
Формулы потенциальной энергии для разных видов сил
1. Для тела, взаимодействующего с
Формулы потенциальной энергии для разных видов сил
1. Для тела, взаимодействующего с
Вывод закона сохранения механической энергии
Механическая энергия консервативной механической системы сохраняется во
Вывод закона сохранения механической энергии
Механическая энергия консервативной механической системы сохраняется во
Закон сохранения механической энергии
При любых процессах, происходящих в системе тел, ее
Закон сохранения механической энергии
При любых процессах, происходящих в системе тел, ее
3. Мощность
Работа силы, совершаемая в единицу времени, называется мощностью.
Мощность N
3. Мощность
Работа силы, совершаемая в единицу времени, называется мощностью.
Мощность N
КПД простых механизмов
Простые механизмы – это приспособления, изменяющие величину или направление
КПД простых механизмов
Простые механизмы – это приспособления, изменяющие величину или направление

Виды механизмов
1. Рычаг:
2. Неподвижный блок: F1=F2
3. Подвижный блок:
4. Полиспаст
Виды механизмов
1. Рычаг:
2. Неподвижный блок: F1=F2
3. Подвижный блок:
4. Полиспаст
 Ядерные реакции, атомная энергия
Ядерные реакции, атомная энергия Исследование устойчивости САР с помощью программы VisSim
Исследование устойчивости САР с помощью программы VisSim Steering System
Steering System Методы зондирования окружающей среды. Радиорефракция
Методы зондирования окружающей среды. Радиорефракция Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Гипотеза о световом давлении
Гипотеза о световом давлении презентация урока Закон Ома для участка цепи
презентация урока Закон Ома для участка цепи Внеклассное мероприятие Физика и кошка
Внеклассное мероприятие Физика и кошка Конденсатор - устройство, предназначенное для накопления заряда и энергии электрического поля
Конденсатор - устройство, предназначенное для накопления заряда и энергии электрического поля Термодинаміка. Внутрішня енергія
Термодинаміка. Внутрішня енергія Дисперсия света
Дисперсия света Реактивное движение
Реактивное движение Измерение давления в покоящейся жидкости
Измерение давления в покоящейся жидкости Система питания дизельного двигателя внутреннего сгорания. (Тема 10.2)
Система питания дизельного двигателя внутреннего сгорания. (Тема 10.2) Виды теплопередач
Виды теплопередач Електричний струм. Електрична провідність матеріалів. Дії електричного струму
Електричний струм. Електрична провідність матеріалів. Дії електричного струму Магические числа
Магические числа Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Исаак Ньютон. Дисперсия
Исаак Ньютон. Дисперсия Механические колебания
Механические колебания Величины в рад защ и безоп
Величины в рад защ и безоп Проектирование масштабных моделей в технике простого занижения. (4 класс)
Проектирование масштабных моделей в технике простого занижения. (4 класс) Повторение темы Электростатика
Повторение темы Электростатика Интегрированные системы ходового мостика (ИСМ)
Интегрированные системы ходового мостика (ИСМ) Экситонные поляритоны в полупроводниковом микрорезонаторе
Экситонные поляритоны в полупроводниковом микрорезонаторе Презентация к уроку Увеличительные приборы
Презентация к уроку Увеличительные приборы Радиоактивность как свидетельство сложного строения атомов. α-, β- и γ- излучения. Правила смещения при α- и βраспадах
Радиоактивность как свидетельство сложного строения атомов. α-, β- и γ- излучения. Правила смещения при α- и βраспадах Ударно-тяговые приборы
Ударно-тяговые приборы