- Презентация: Координатно-векторный метод решения стереометрических задач

Содержание
- 2. 1. Координаты точки , 2. Координаты вектора 3. Длина вектора 4. Скалярное произведение векторов где α
- 3. Через любые две точки проходит прямая и притом только одна. N - направляющий вектор прямой MN.
- 4. M N P Через любые три точки проходит плоскость и притом только одна. – вектор нормали
- 5. Плоскость
- 6. I. Углы 1. Угол межу прямыми - 2. Угол межу плоскостями - 3. Угол межу прямой
- 7. Введение системы координат В задачах типа C2 никаких координат и векторов нет. Поэтому их придется вводить
- 8. Обозначим АВ = а, AD = b, АА1 = с. Выпишем координаты точек: А(0; 0; 0)
- 9. Введение системы координат 3. Правильная треугольная призма Вводим систему координат: Начало координат — в точке A;
- 10. Теперь рассмотрим всю призму вместе с построенной системой координат рис.2: Получаем следующие координаты точек: 3. Правильная
- 11. Введение системы координат 4. Правильная шестиугольная призма Введем систему координат как показано на рис. Пусть все
- 12. Введение системы координат 5. Правильная четырехугольная пирамида Обозначим ее SABCD, где S — вершина. Введем систему
- 13. II. Расстояния 1. Расстояние от точки до прямой M S В А находим cosα ( *
- 14. 2. Расстояние от точки до плоскости вычисляется по формуле: II. Расстояния
- 15. B1 C1 А D II. Расстояния 3. Расстояние между скрещивающимися прямыми Рассмотрим его нахождение на примере:
- 17. Скачать презентацию
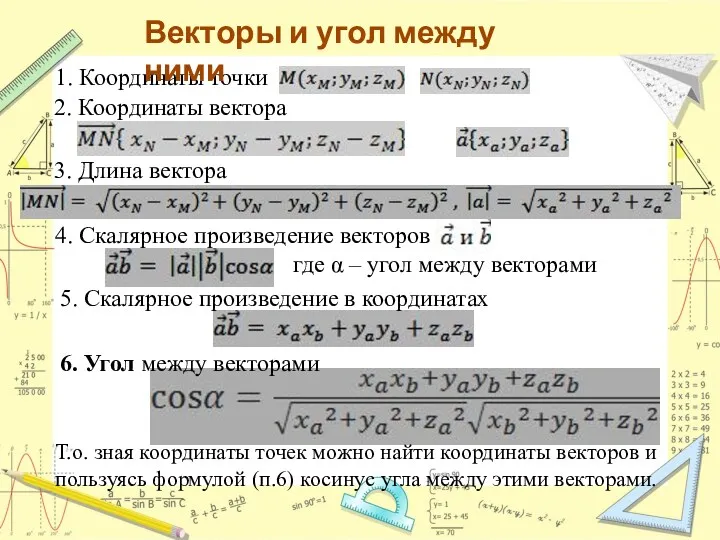
1. Координаты точки
,
2. Координаты вектора
3. Длина вектора
4.
1. Координаты точки
,
2. Координаты вектора
3. Длина вектора
4.
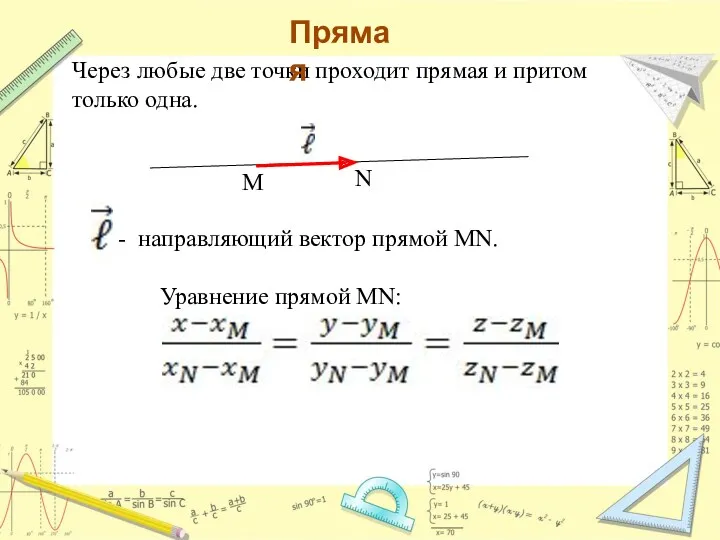
Через любые две точки проходит прямая и притом только одна.
Через любые две точки проходит прямая и притом только одна.
M
N
P
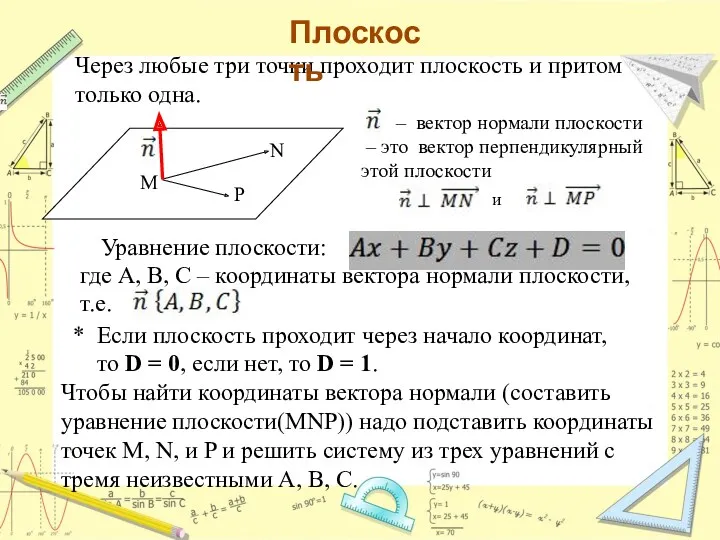
Через любые три точки проходит плоскость и притом только одна.
–
M
N
P
Через любые три точки проходит плоскость и притом только одна.
–
Плоскость
Плоскость
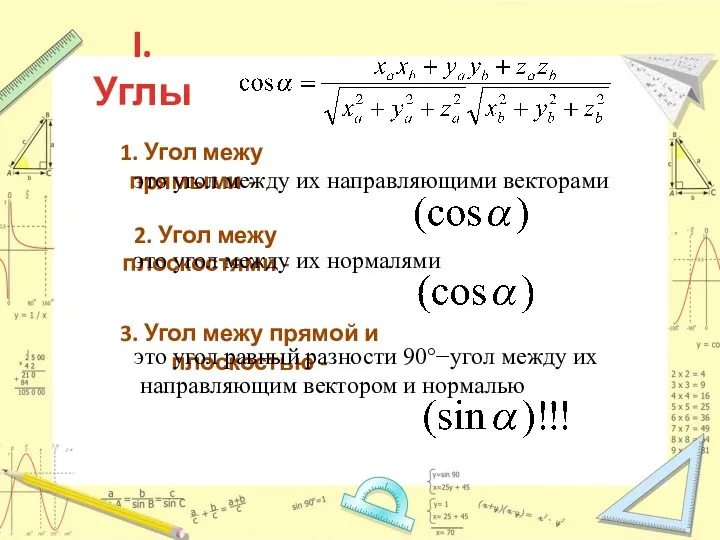
I. Углы
1. Угол межу прямыми -
2. Угол межу плоскостями -
I. Углы
1. Угол межу прямыми -
2. Угол межу плоскостями -
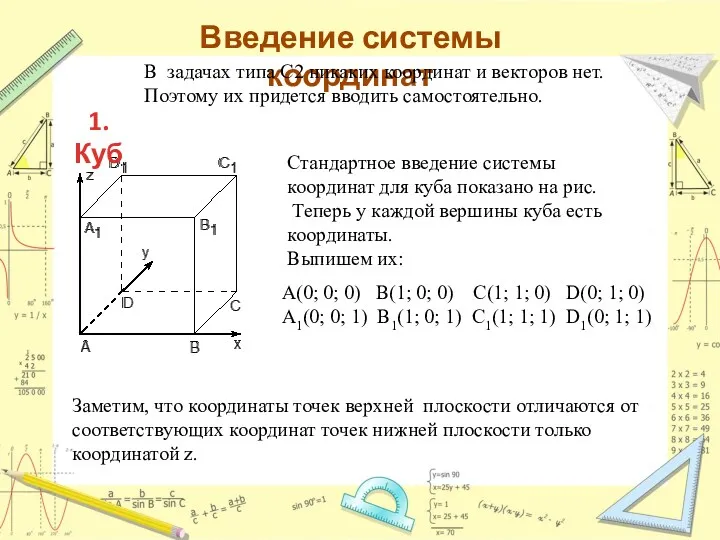
Введение системы координат
В задачах типа C2 никаких координат и векторов нет.
Введение системы координат
В задачах типа C2 никаких координат и векторов нет.
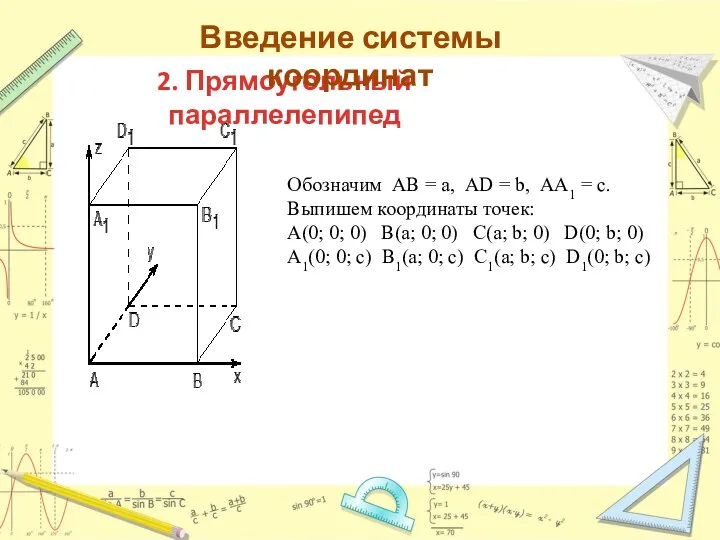
Обозначим АВ = а, AD = b, АА1 = с.
Выпишем координаты
Обозначим АВ = а, AD = b, АА1 = с.
Выпишем координаты
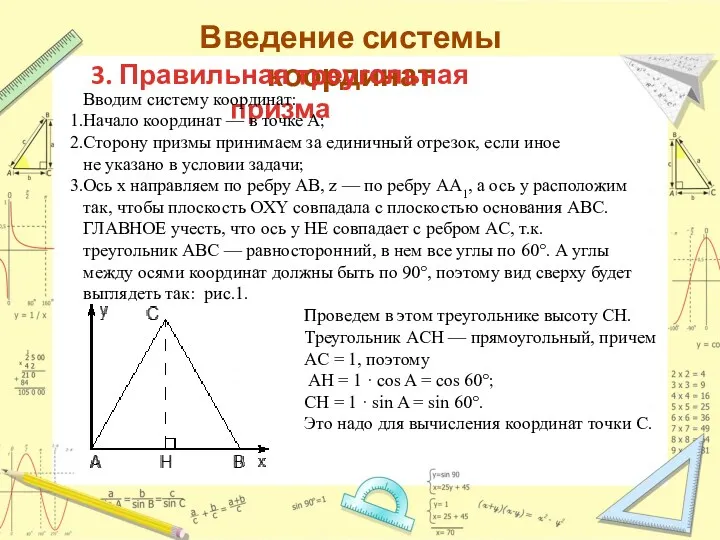
Введение системы координат
3. Правильная треугольная призма
Вводим систему координат:
Начало координат — в точке A;
Сторону призмы
Введение системы координат
3. Правильная треугольная призма
Вводим систему координат:
Начало координат — в точке A;
Сторону призмы
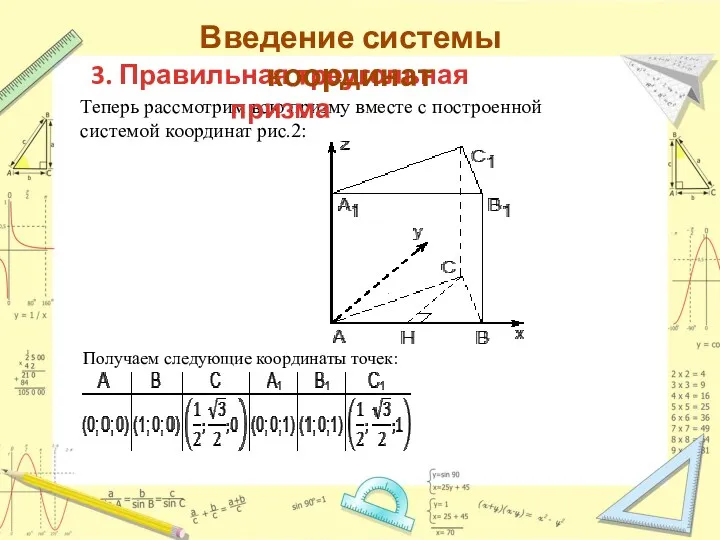
Теперь рассмотрим всю призму вместе с построенной системой координат рис.2:
Получаем следующие координаты точек:
3.
Теперь рассмотрим всю призму вместе с построенной системой координат рис.2:
Получаем следующие координаты точек:
3.
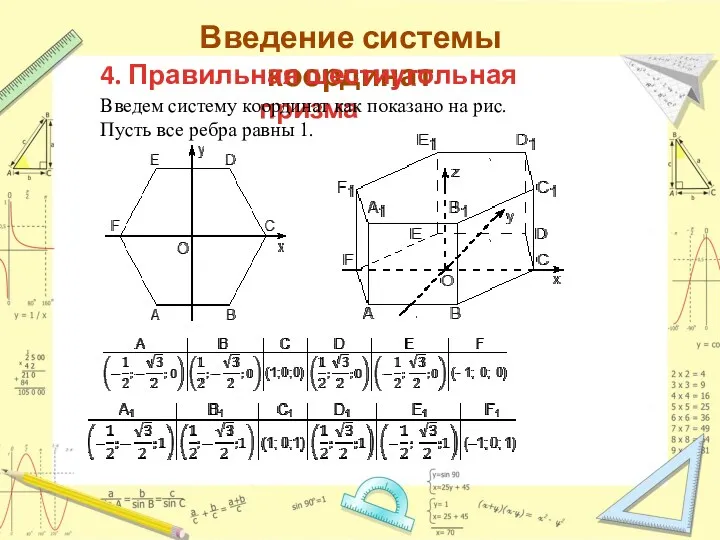
Введение системы координат
4. Правильная шестиугольная призма
Введем систему координат как показано на
Введение системы координат
4. Правильная шестиугольная призма
Введем систему координат как показано на
Введение системы координат
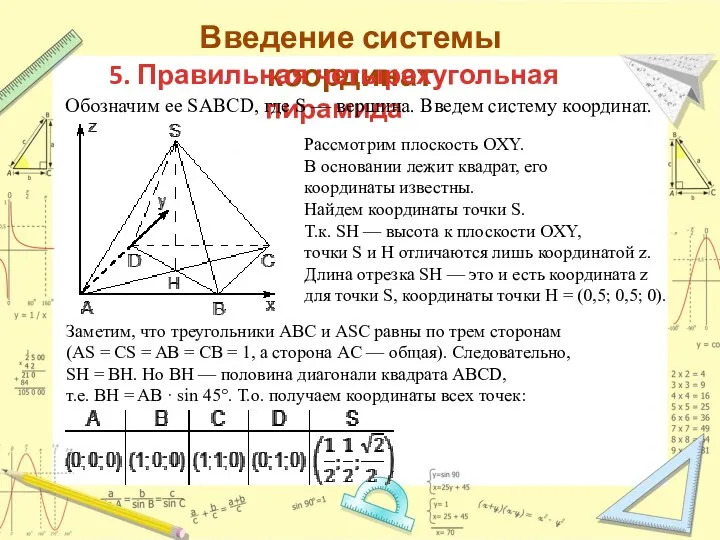
5. Правильная четырехугольная пирамида
Обозначим ее SABCD, где S — вершина. Введем систему координат.
Введение системы координат
5. Правильная четырехугольная пирамида
Обозначим ее SABCD, где S — вершина. Введем систему координат.
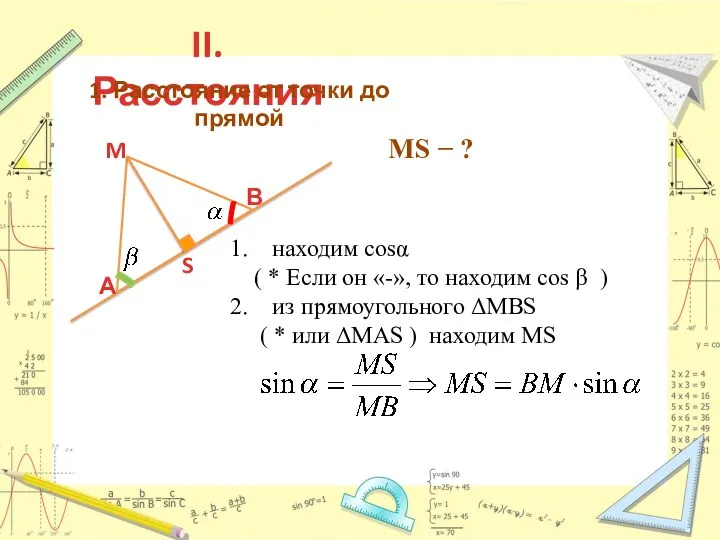
II. Расстояния
1. Расстояние от точки до прямой
M
S
В
А
находим cosα
( *
II. Расстояния
1. Расстояние от точки до прямой
M
S
В
А
находим cosα
( *
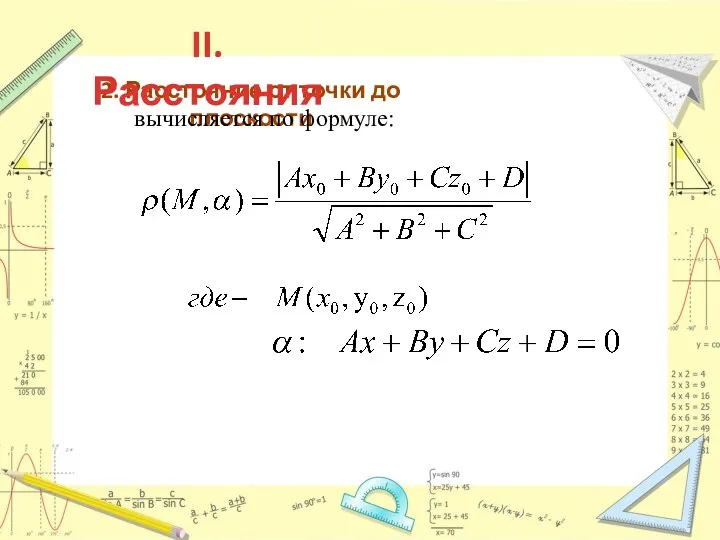
2. Расстояние от точки до плоскости
вычисляется по формуле:
II. Расстояния
2. Расстояние от точки до плоскости
вычисляется по формуле:
II. Расстояния
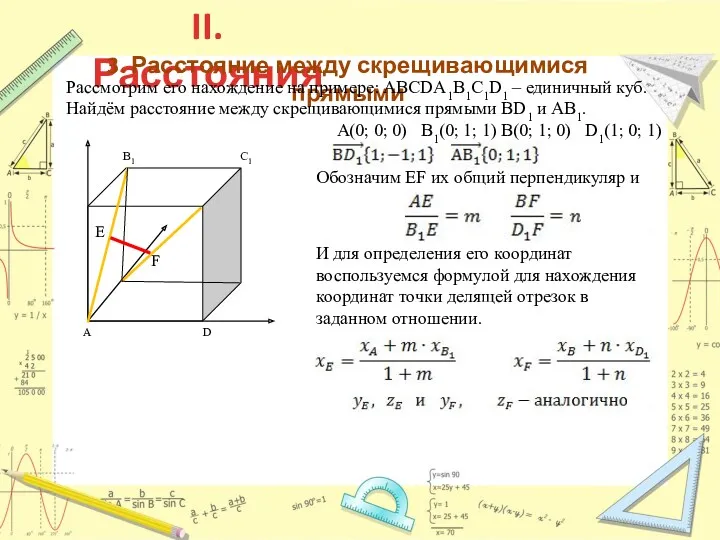
B1 C1
А D
II. Расстояния
3. Расстояние между скрещивающимися прямыми
Рассмотрим его нахождение на
B1 C1
А D
II. Расстояния
3. Расстояние между скрещивающимися прямыми
Рассмотрим его нахождение на
 Четырёхугольники
Четырёхугольники проект
проект к урокам № 19-20 по геометрии 7 кл
к урокам № 19-20 по геометрии 7 кл Презентация Правиьный многоугольник
Презентация Правиьный многоугольник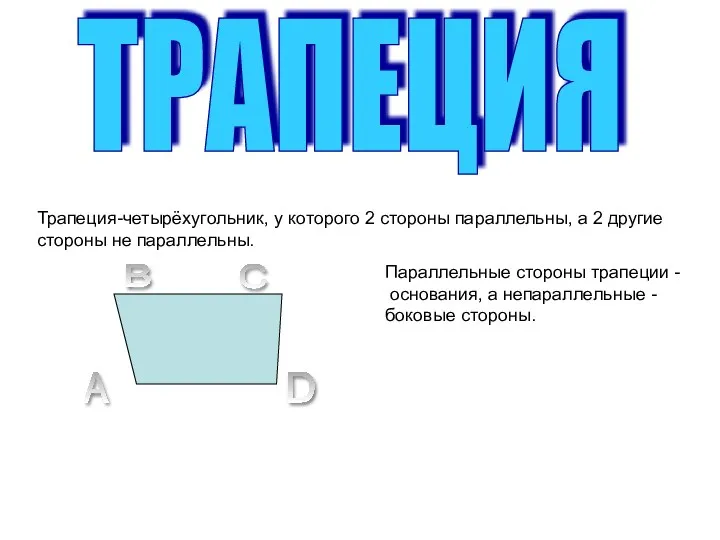 Урок-презентация по геометрии 8 класс на тему Трапеция
Урок-презентация по геометрии 8 класс на тему Трапеция Урок математики в 6 классе по теме Окружность
Урок математики в 6 классе по теме Окружность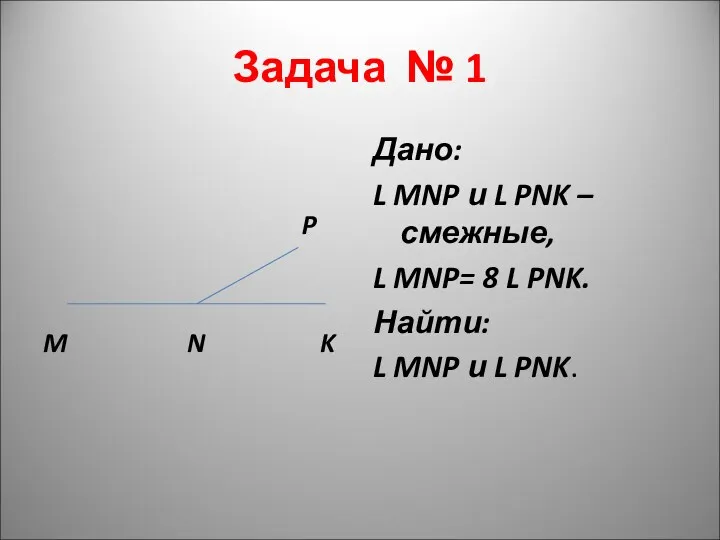 Смежные углы
Смежные углы Презентация к уроку Подобные треугольники
Презентация к уроку Подобные треугольники Прямоугольные треугольники
Прямоугольные треугольники Урок-практикум Объём цилиндра в заданиях ЕГЭ
Урок-практикум Объём цилиндра в заданиях ЕГЭ Соотношение между сторонами и углами треугольника.
Соотношение между сторонами и углами треугольника. Урок в 7 классе Сумма углов треугольника
Урок в 7 классе Сумма углов треугольника Презентация к уроку по теме: Пирамида
Презентация к уроку по теме: Пирамида Презентация Построение сечений тетраэдра и параллелепипеда
Презентация Построение сечений тетраэдра и параллелепипеда урок-презентация по теме Цилиндр
урок-презентация по теме Цилиндр теорема синусов и косинусов
теорема синусов и косинусов презентация на тему: Теорема Пифагора
презентация на тему: Теорема Пифагора Урок геометрии в 8 классе Свойства площади
Урок геометрии в 8 классе Свойства площади Презентация по теме Симметрия
Презентация по теме Симметрия Презентация урока Правильные фигуры в геометрии
Презентация урока Правильные фигуры в геометрии Открытый урок по геометрии в 8 классе
Открытый урок по геометрии в 8 классе Пирамида
Пирамида Решение геометрических задач при подготовке к ГИА
Решение геометрических задач при подготовке к ГИА Уравнение окружности
Уравнение окружности Свойства прямоугольного треугольника, геометрия 7 класс
Свойства прямоугольного треугольника, геометрия 7 класс Параллельность прямых и плоскостей. Параллельные прямые в пространстве
Параллельность прямых и плоскостей. Параллельные прямые в пространстве Проще простого. Презентация программы предпрофильного курса по математике по теме Геометрические преобразования
Проще простого. Презентация программы предпрофильного курса по математике по теме Геометрические преобразования Прямая и отрезок. Луч и угол
Прямая и отрезок. Луч и угол