- Анализ многосвязных динамических систем

Содержание
- 2. Анализ многосвязных динамических систем. Под анализом понимается процесс исследования системы управления, основанный на ее декомпозиции с
- 3. К задачам анализа системы управления относятся: определение объекта анализа; структурирование системы; определение функциональных особенностей системы управления;
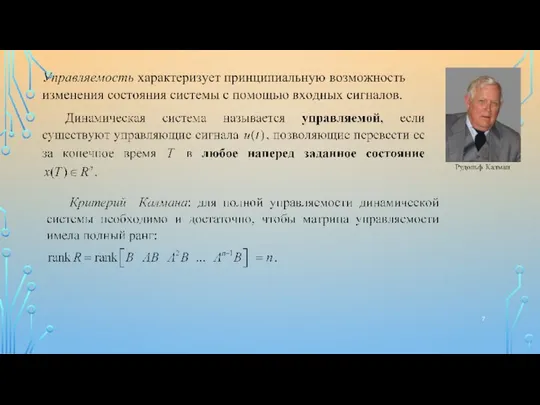
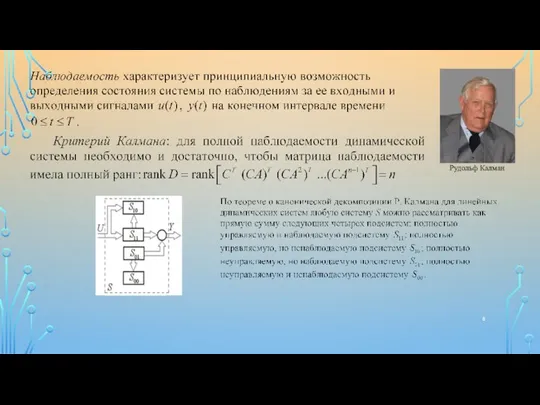
- 4. Фундаментальные свойства линейных динамических систем Устойчивость Управляемость Наблюдаемость
- 5. MIMO: SISO:
- 6. Иллюстрации устойчивости\неустойчивости
- 9. Анализ линейных МСУ. Вычисление характеристик. Характеристики Импульсная функция\характеристика Переходная функция\характеристика Частотные характеристики Быстродействие (время переходного процесса)
- 10. Пример. Турбореактивный двигатель с форсажной камерой (ТРДФ) [Морозовский В.Т.] В двигателе регулирование скорости вращения вала турбины
- 11. td=0.7; ts=0.3; tc=0.1; k1=0.1; k2=0.4; k3=0.5; k4=0.15; k5=0.18; A=[-1/td k1/td -k2/td;-1/ts 0 0;k5/tc -k3/tc -k4/tc] B=[0
- 12. A = -1.4286 0.1429 -0.5714 -3.3333 0 0 1.8000 -5.0000 -1.5000 B = 0 0 3.3333
- 13. From input 2 to output... -5.714 s 1: --------------------------------- =W21 s^3 + 2.929 s^2 + 3.648
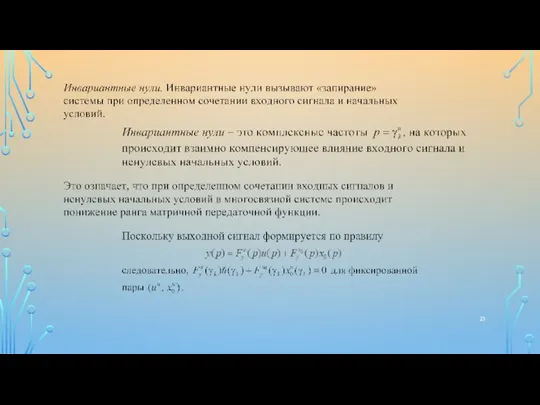
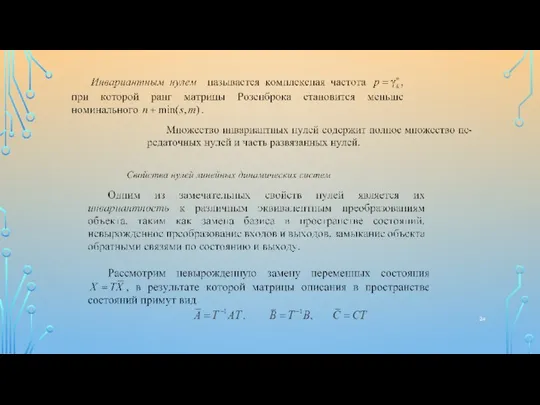
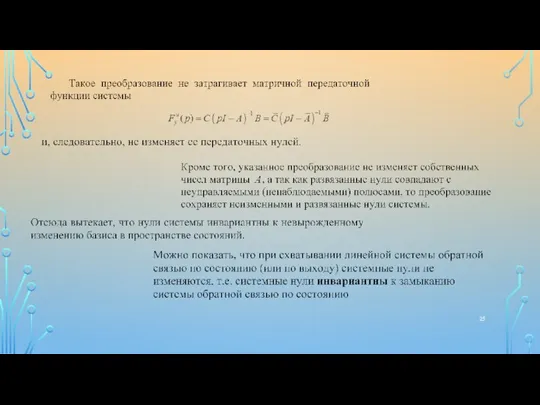
- 14. Нули системы и определяемые ими структурные свойства где Структурные свойства динамических систем
- 26. Вычисления и идентификация типа нулей Существуют различные определения и способы вычисления нулей многомерной динамической системы, опирающиеся
- 27. Тогда возможен следующий прием: система дважды квадрируется различными матрицами, каждый раз находится множество нулей, искомое множество
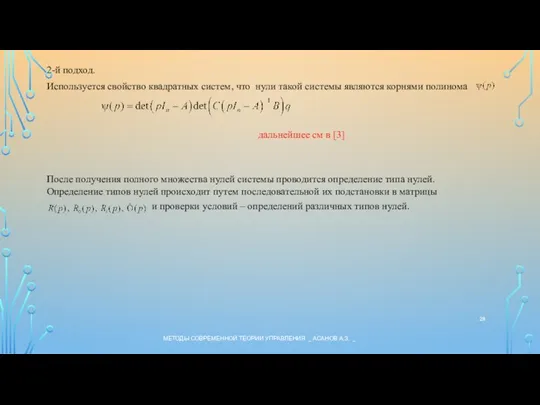
- 28. МЕТОДЫ СОВРЕМЕННОЙ ТЕОРИИ УПРАВЛЕНИЯ _ АСАНОВ А.З. _ 2-й подход. Используется свойство квадратных систем, что нули
- 30. Скачать презентацию
Анализ многосвязных динамических систем.
Под анализом понимается процесс исследования системы управления, основанный
Анализ многосвязных динамических систем.
Под анализом понимается процесс исследования системы управления, основанный
К задачам анализа системы управления относятся:
определение объекта анализа;
структурирование системы;
определение функциональных особенностей системы
К задачам анализа системы управления относятся:
определение объекта анализа;
структурирование системы;
определение функциональных особенностей системы
Фундаментальные свойства линейных динамических систем
Устойчивость
Управляемость
Наблюдаемость
Фундаментальные свойства линейных динамических систем
Устойчивость
Управляемость
Наблюдаемость
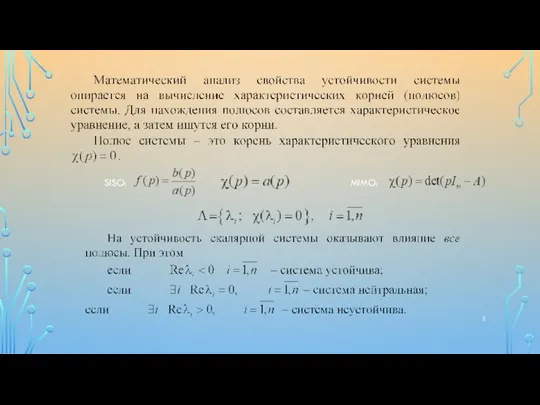
MIMO:
SISO:
MIMO:
SISO:
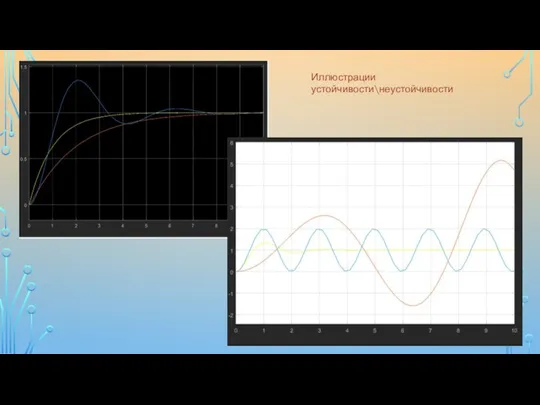
Иллюстрации устойчивости\неустойчивости
Иллюстрации устойчивости\неустойчивости
Анализ линейных МСУ. Вычисление характеристик.
Характеристики
Импульсная функция\характеристика
Переходная функция\характеристика
Частотные характеристики
Быстродействие (время переходного процесса)
Динамическая
Анализ линейных МСУ. Вычисление характеристик.
Характеристики
Импульсная функция\характеристика
Переходная функция\характеристика
Частотные характеристики
Быстродействие (время переходного процесса)
Динамическая
![Пример. Турбореактивный двигатель с форсажной камерой (ТРДФ) [Морозовский В.Т.] В](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/364616/slide-9.jpg)
Пример.
Турбореактивный двигатель с форсажной камерой (ТРДФ) [Морозовский В.Т.]
В двигателе регулирование скорости
Пример.
Турбореактивный двигатель с форсажной камерой (ТРДФ) [Морозовский В.Т.]
В двигателе регулирование скорости
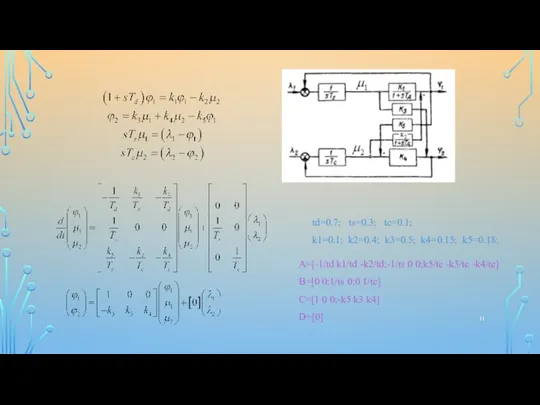
td=0.7; ts=0.3; tc=0.1;
k1=0.1; k2=0.4; k3=0.5; k4=0.15; k5=0.18;
A=[-1/td k1/td -k2/td;-1/ts 0 0;k5/tc
td=0.7; ts=0.3; tc=0.1;
k1=0.1; k2=0.4; k3=0.5; k4=0.15; k5=0.18;
A=[-1/td k1/td -k2/td;-1/ts 0 0;k5/tc
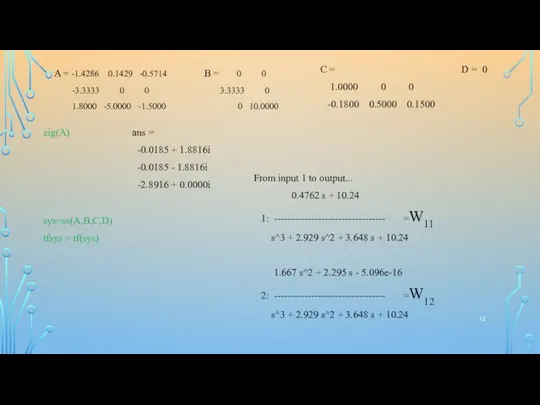
A = -1.4286 0.1429 -0.5714
-3.3333 0 0
1.8000 -5.0000 -1.5000
B
A = -1.4286 0.1429 -0.5714
-3.3333 0 0
1.8000 -5.0000 -1.5000
B
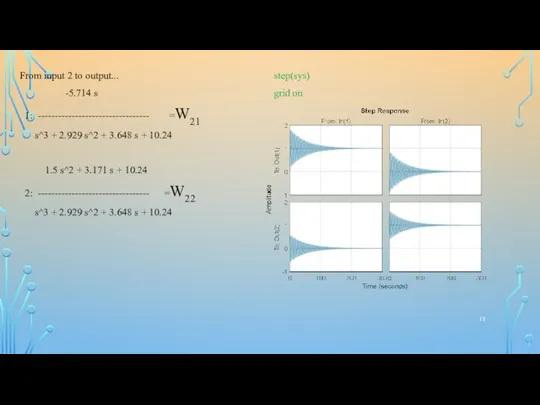
From input 2 to output...
-5.714 s
1: --------------------------------- =W21
From input 2 to output...
-5.714 s
1: --------------------------------- =W21
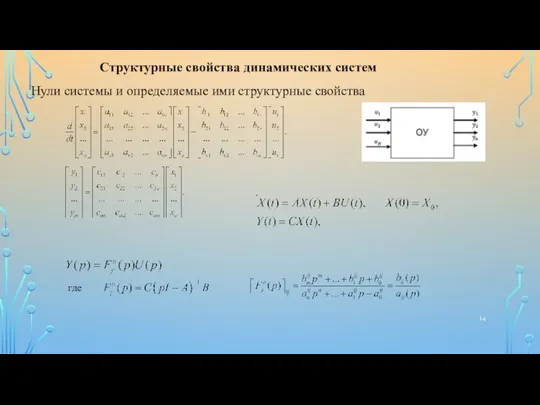
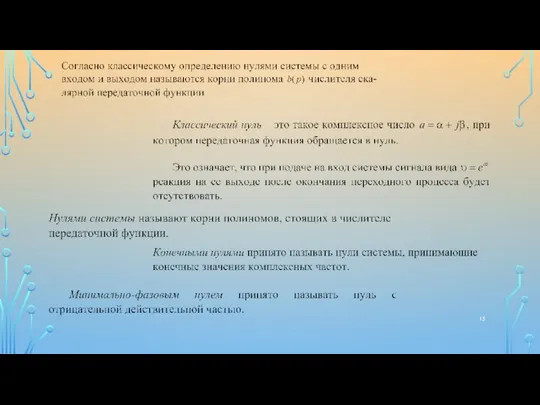
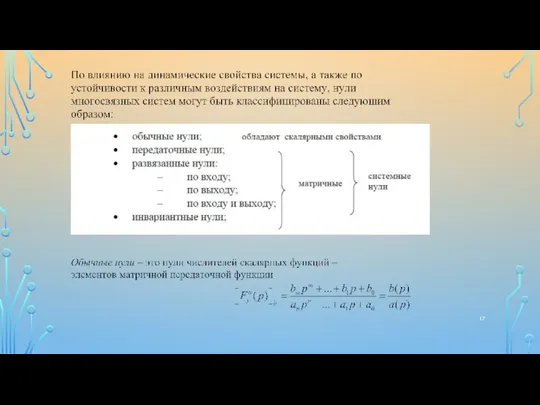
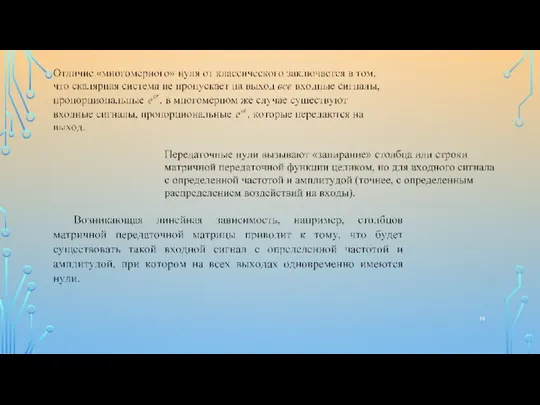
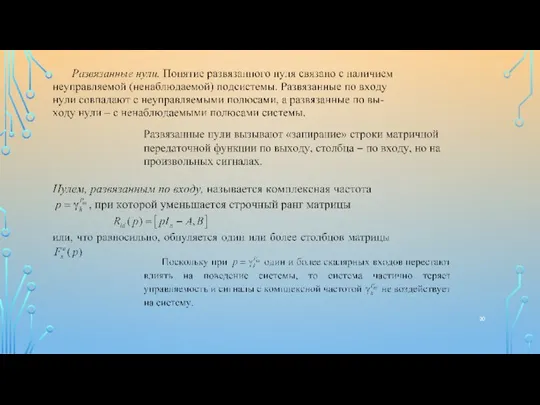
Нули системы и определяемые ими структурные свойства
где
Структурные свойства динамических систем
Нули системы и определяемые ими структурные свойства
где
Структурные свойства динамических систем





Вычисления и идентификация типа нулей
Существуют различные определения и способы вычисления
Вычисления и идентификация типа нулей
Существуют различные определения и способы вычисления
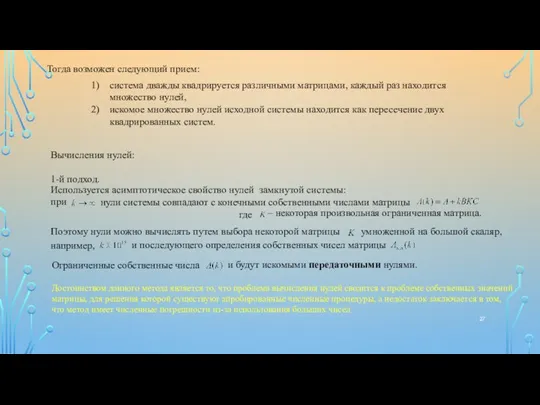
Тогда возможен следующий прием:
система дважды квадрируется различными матрицами, каждый раз находится
Тогда возможен следующий прием:
система дважды квадрируется различными матрицами, каждый раз находится
МЕТОДЫ СОВРЕМЕННОЙ ТЕОРИИ УПРАВЛЕНИЯ _ АСАНОВ А.З. _
2-й подход.
Используется свойство квадратных
МЕТОДЫ СОВРЕМЕННОЙ ТЕОРИИ УПРАВЛЕНИЯ _ АСАНОВ А.З. _
2-й подход.
Используется свойство квадратных
 Зміна виконавця у середовищі Скретч
Зміна виконавця у середовищі Скретч ЕЦУР: основные проблемы у ОМСУ и их решение
ЕЦУР: основные проблемы у ОМСУ и их решение Объектно-ориентированное программирование. Языки C++ и C#
Объектно-ориентированное программирование. Языки C++ и C# Всемирная компьютерная сеть интернет. Коммуникационные технологии
Всемирная компьютерная сеть интернет. Коммуникационные технологии Imagine Cup. Мастер-класс по C# от MSP
Imagine Cup. Мастер-класс по C# от MSP Возможности настольных издательских систем. Информационная система
Возможности настольных издательских систем. Информационная система Матрицы
Матрицы Кодирование графической информации
Кодирование графической информации Знакомство с языком Паскаль
Знакомство с языком Паскаль Порядок учета документов, входящих в состав библиотечного фонда
Порядок учета документов, входящих в состав библиотечного фонда Разработка программы для шифрования и дешифрования осмысленного текста с ключом
Разработка программы для шифрования и дешифрования осмысленного текста с ключом Особенности изучения английского языка с помощью компьютера и интернета
Особенности изучения английского языка с помощью компьютера и интернета Основные компоненты компьютера и их функции
Основные компоненты компьютера и их функции Язык определения данных. Data Definition Language, DDL
Язык определения данных. Data Definition Language, DDL Понятие об информации. Представление информации. Информационная деятельность человека.
Понятие об информации. Представление информации. Информационная деятельность человека. Операции для работы с файлами
Операции для работы с файлами Оптимальное планирование в MS Excel
Оптимальное планирование в MS Excel Программирование на языке C++
Программирование на языке C++ Качество обслуживания
Качество обслуживания Введение в язык программирования Python
Введение в язык программирования Python Системы счисления. Представление информации в компьютере
Системы счисления. Представление информации в компьютере Компьютерные сети
Компьютерные сети Программирование разветвляющихся алгоритмов в Turbo Pascal
Программирование разветвляющихся алгоритмов в Turbo Pascal Поиск информации в интернете
Поиск информации в интернете Хранение информации. Память. Носители информации
Хранение информации. Память. Носители информации Представления о технических и программных средствах телекоммуникационных технологий. Лекция 33. Тема 5.1
Представления о технических и программных средствах телекоммуникационных технологий. Лекция 33. Тема 5.1 Руководство по написанию материалов для журнала Популярная механика
Руководство по написанию материалов для журнала Популярная механика Информатика. Что такое информатика. Структура информатики
Информатика. Что такое информатика. Структура информатики