- DemoVisionRobot. Робот с техническим зрением

Содержание
- 2. Устройство робота: 3-хзвенный манипулятор OR-LC-xARM-v1 со схватом OR-LC-GRIP-HXT900-v1 на последнем звене сервопривода HXT12K, HXT5010, HXT900 модуль
- 3. Математическая модель Модель описывает кинематику манипулятора. Робот осуществляет слежение за объектом, для чего необходимо: определять положение
- 4. Математическая модель Модель оптической геометрии в трехмерном пространстве
- 5. Техническое зрение
- 6. Система управления
- 7. Алгоритмы управления Уровни управления: Интеллектуальный Тактический Исполнительный
- 8. Программирование и отладка микроконтроллера Окно среды Eclipse с открытым проектом Средства разработки: Система управления имеет интерфейсы
- 9. Программирование и отладка микроконтроллера Программа-монитор, написанная на кроссплатформенной библиотеке Qt в среде Qt Creator color_track С++
- 11. Скачать презентацию
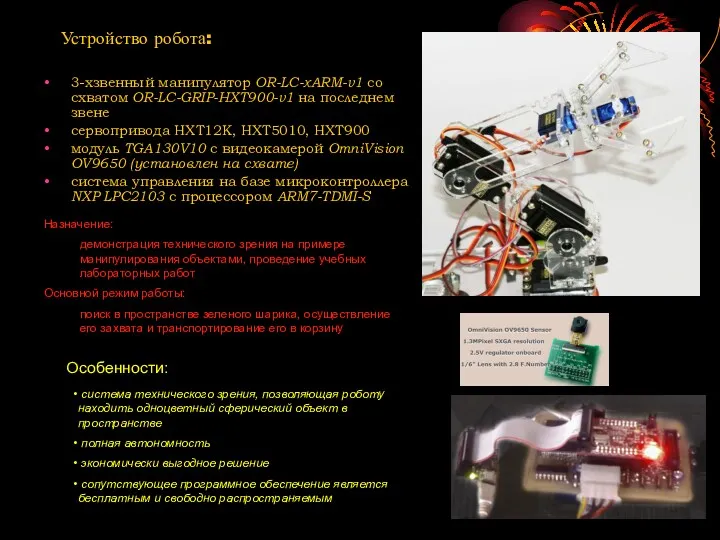
Устройство робота:
3-хзвенный манипулятор OR-LC-xARM-v1 со схватом OR-LC-GRIP-HXT900-v1 на последнем звене
сервопривода HXT12K,
Устройство робота:
3-хзвенный манипулятор OR-LC-xARM-v1 со схватом OR-LC-GRIP-HXT900-v1 на последнем звене
сервопривода HXT12K,
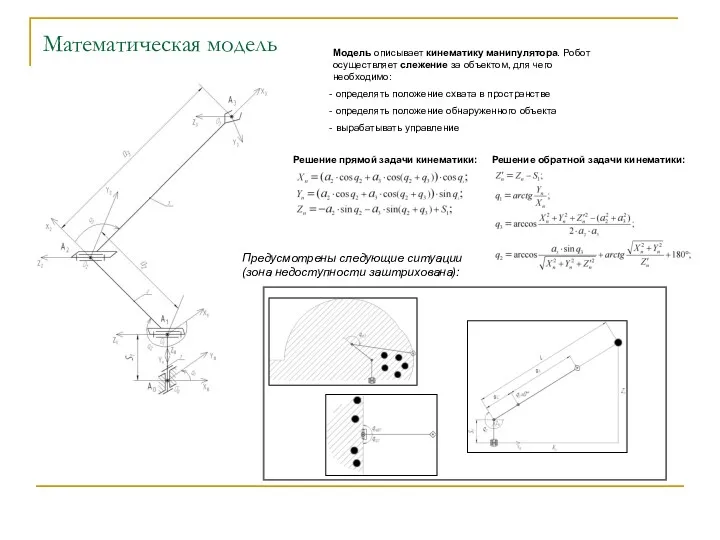
Математическая модель
Модель описывает кинематику манипулятора. Робот осуществляет слежение за объектом, для
Математическая модель
Модель описывает кинематику манипулятора. Робот осуществляет слежение за объектом, для
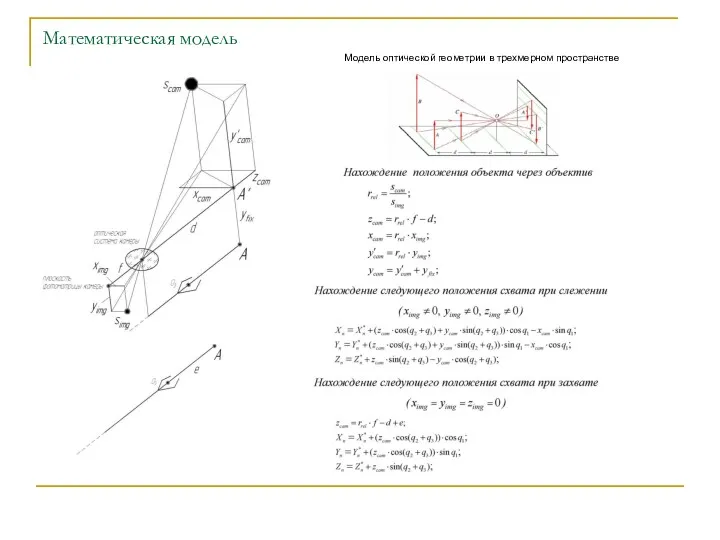
Математическая модель
Модель оптической геометрии в трехмерном пространстве
Математическая модель
Модель оптической геометрии в трехмерном пространстве
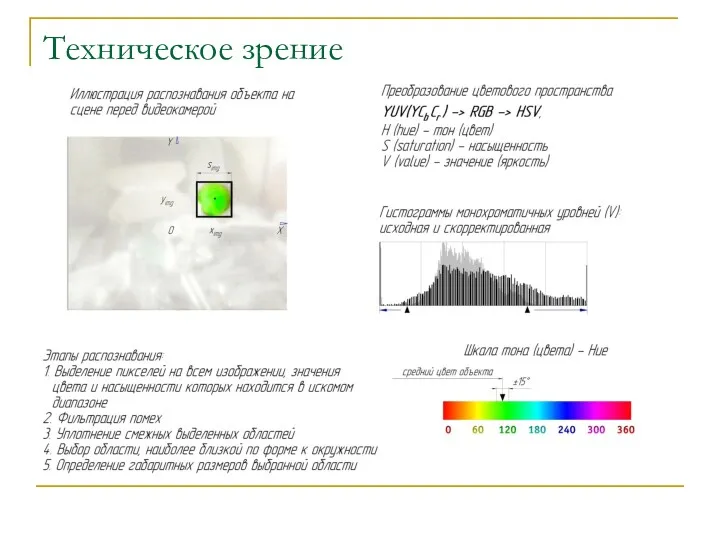
Техническое зрение
Техническое зрение
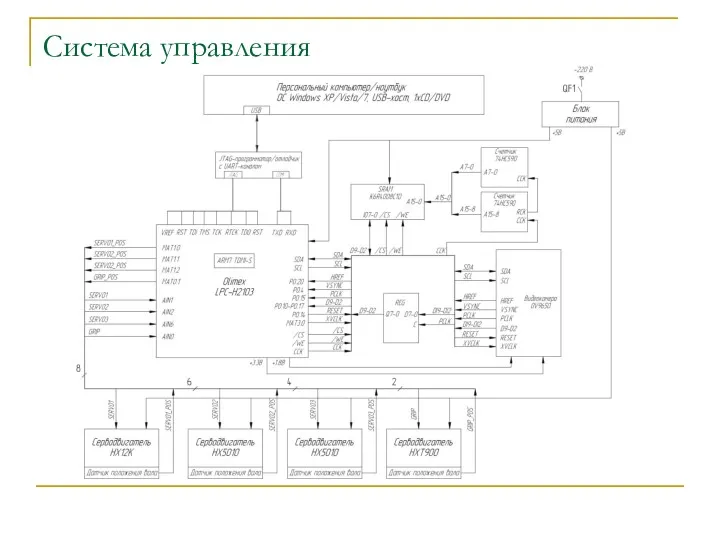
Система управления
Система управления

Алгоритмы управления
Уровни управления:
Интеллектуальный
Тактический
Исполнительный
Алгоритмы управления
Уровни управления:
Интеллектуальный
Тактический
Исполнительный
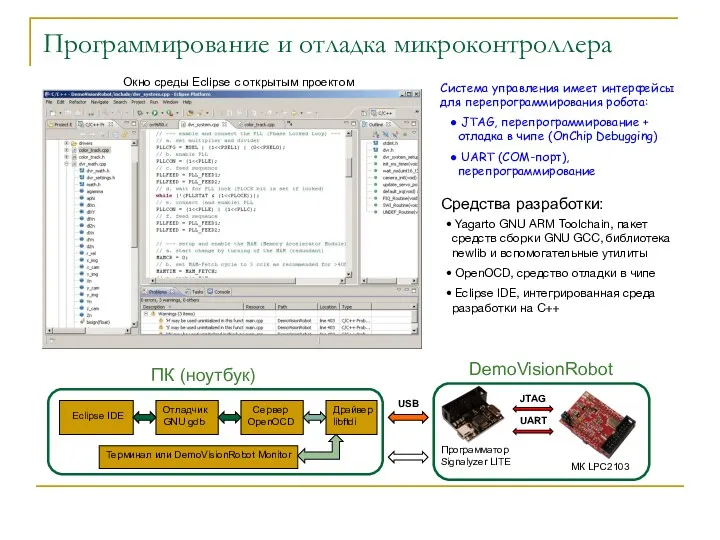
Программирование и отладка микроконтроллера
Окно среды Eclipse с открытым проектом
Средства разработки:
Система управления
Программирование и отладка микроконтроллера
Окно среды Eclipse с открытым проектом
Средства разработки:
Система управления
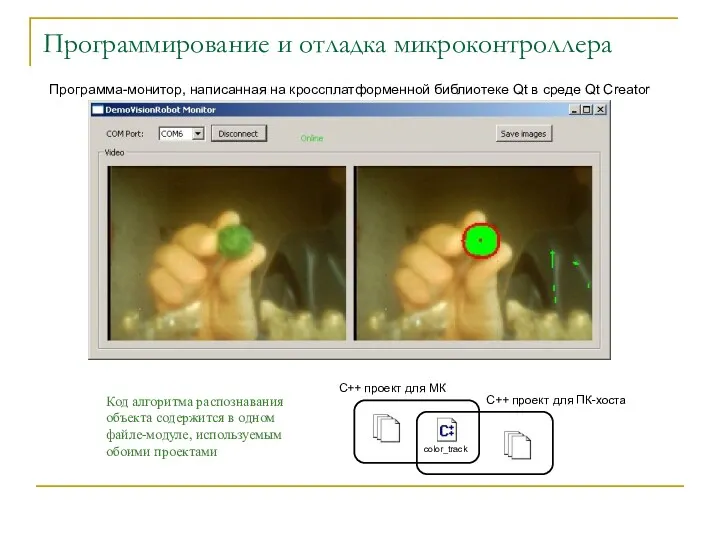
Программирование и отладка микроконтроллера
Программа-монитор, написанная на кроссплатформенной библиотеке Qt в среде
Программирование и отладка микроконтроллера
Программа-монитор, написанная на кроссплатформенной библиотеке Qt в среде
 Развитие информационной компетенции по дополнительной общеобразовательной программе Основы журналистики
Развитие информационной компетенции по дополнительной общеобразовательной программе Основы журналистики Умовні оператори
Умовні оператори Тестирование информационной системы
Тестирование информационной системы Грубые ошибки на пути к качественной журналистике
Грубые ошибки на пути к качественной журналистике Кодирование информации
Кодирование информации Установка и настройка службы DNS-сервер
Установка и настройка службы DNS-сервер Операції над об’єктами файлової системи
Операції над об’єктами файлової системи Открытый урок по информатике 4 класс
Открытый урок по информатике 4 класс Работа в CRM. Инструкция
Работа в CRM. Инструкция A binary Hopfield neural network
A binary Hopfield neural network Using objects in JavaScript. Accessing DOM in JavaScript
Using objects in JavaScript. Accessing DOM in JavaScript Электронная почта
Электронная почта QuickBooks Customer Support Number
QuickBooks Customer Support Number Инструкция по обеспечению актуальности данных при формировании и ведении ведомственных перечней государственных услуг и работ
Инструкция по обеспечению актуальности данных при формировании и ведении ведомственных перечней государственных услуг и работ Сервисы Веб 2.0. Социальные закладки
Сервисы Веб 2.0. Социальные закладки кодирование графической информации
кодирование графической информации Использование триггеров для создания интерактивных презентаций
Использование триггеров для создания интерактивных презентаций Інтерактивне керування потоком автотранспорту з ситуаційного центру
Інтерактивне керування потоком автотранспорту з ситуаційного центру Логические задачи
Логические задачи Проблема зависимости подростков от социальных сетей
Проблема зависимости подростков от социальных сетей Этапы решения задач на компьютере. языки программирования.
Этапы решения задач на компьютере. языки программирования. Персональный компьютер: устройство и принцип работы
Персональный компьютер: устройство и принцип работы Древние системы счисления
Древние системы счисления Теоремы Шеннона. Лекция 3
Теоремы Шеннона. Лекция 3 Юкевич и камрады (ютубер, который расказывает о старых играх)
Юкевич и камрады (ютубер, который расказывает о старых играх) Хранение информации в файлах. На примере c#
Хранение информации в файлах. На примере c# Автоматическая обработка информации
Автоматическая обработка информации Информатика. Лекции – С++
Информатика. Лекции – С++