Диагностирование непрерывных динамических систем с использованием смены позиции входного сигнала презентация
- Диагностирование непрерывных динамических систем с использованием смены позиции входного сигнала

Содержание
- 2. Общая структура системы диагностирования Модель Объект Модели дефектов Алгоритм диагностирования Модели дефектов: Модели со сменой позиции
- 3. Аналитические зависимости для реализации алгоритма диагностирования непрерывных систем методом смены позиции входного сигнала (1) (2) (3)
- 4. Алгоритм поиска структурных дефектов методом смены позиции входного сигнала Рис. 2. Функциональная схема устройства поиска параметрических
- 5. Пример применения метода Рис. 3. Структурная схема объекта диагностирования. 5 Передаточные функции блоков объекта: При наличии
- 6. Алгоритм поиска дефектов методом анализа знаков передач сигналов с использованием бинарного диагностического признака Рис. 4. Функциональная
- 7. Аналитические зависимости для реализации алгоритмов диагностирования методом анализа знаков передач сигналов (13) (14) (15) (16) 7
- 8. Рис. 5. Структурная схема модели объекта диагностирования №1 Рис. 6. Зависимость различимости дефектов от относительной погрешности
- 9. Интерфейс программного комплекса Рис. 7. Главное окно программы 9
- 10. Структурная схема системы диагностирования в среде Simulink, полученная программой-конструктором Рис. 11. Подсистема вычисления диагностических признаков Рис.
- 11. Основные результаты работы: Разработаны алгоритмы поиска дефектов в системах автоматического управления, основанные на использовании смены позиции
- 12. Свидетельства новизны и практической значимости работы 12
- 14. Скачать презентацию
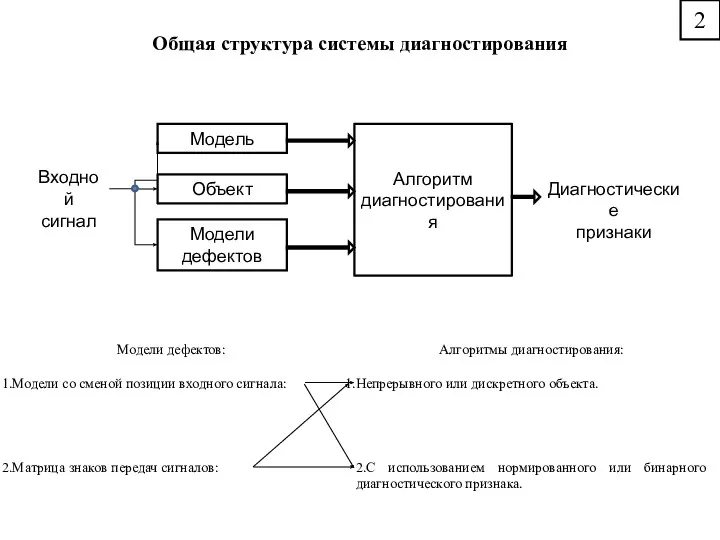
Общая структура системы диагностирования
Модель
Объект
Модели дефектов
Алгоритм диагностирования
Модели дефектов:
Модели со сменой позиции входного
Общая структура системы диагностирования
Модель
Объект
Модели дефектов
Алгоритм диагностирования
Модели дефектов:
Модели со сменой позиции входного
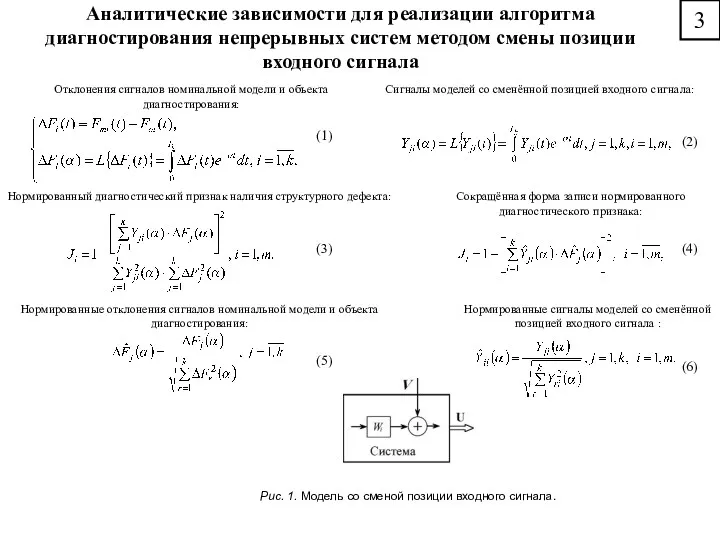
Аналитические зависимости для реализации алгоритма диагностирования непрерывных систем методом смены позиции
Аналитические зависимости для реализации алгоритма диагностирования непрерывных систем методом смены позиции

Алгоритм поиска структурных дефектов методом смены позиции входного сигнала
Рис. 2. Функциональная
Алгоритм поиска структурных дефектов методом смены позиции входного сигнала
Рис. 2. Функциональная
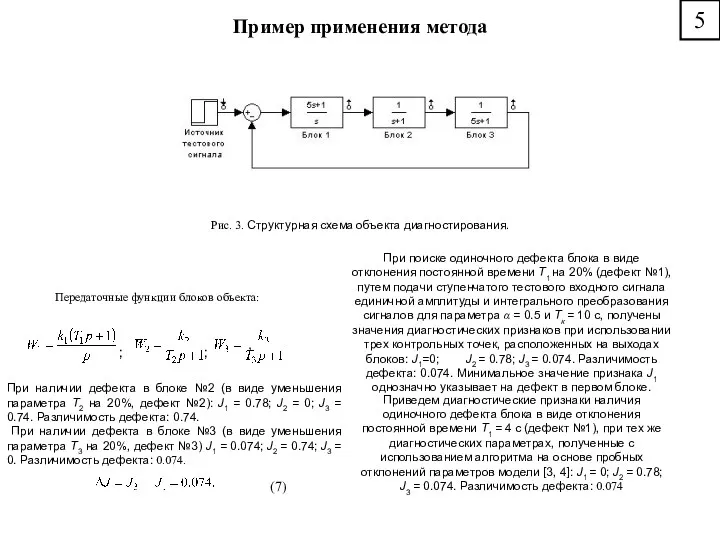
Пример применения метода
Рис. 3. Структурная схема объекта диагностирования.
5
Передаточные функции блоков
Пример применения метода
Рис. 3. Структурная схема объекта диагностирования.
5
Передаточные функции блоков
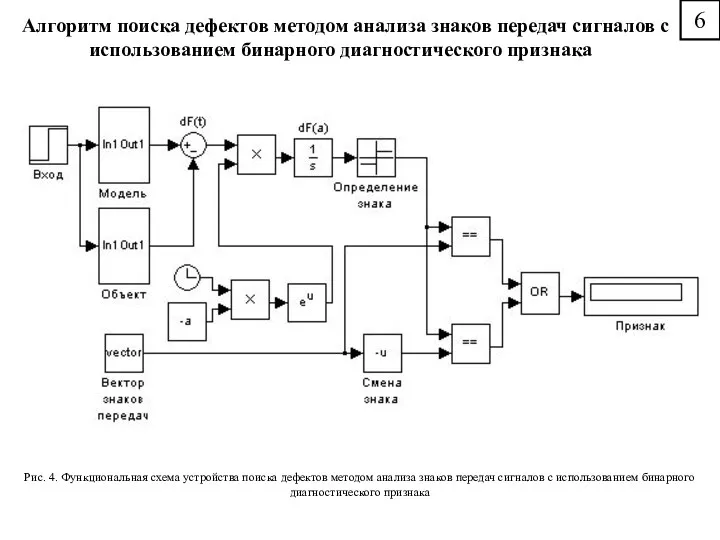
Алгоритм поиска дефектов методом анализа знаков передач сигналов с использованием
Алгоритм поиска дефектов методом анализа знаков передач сигналов с использованием
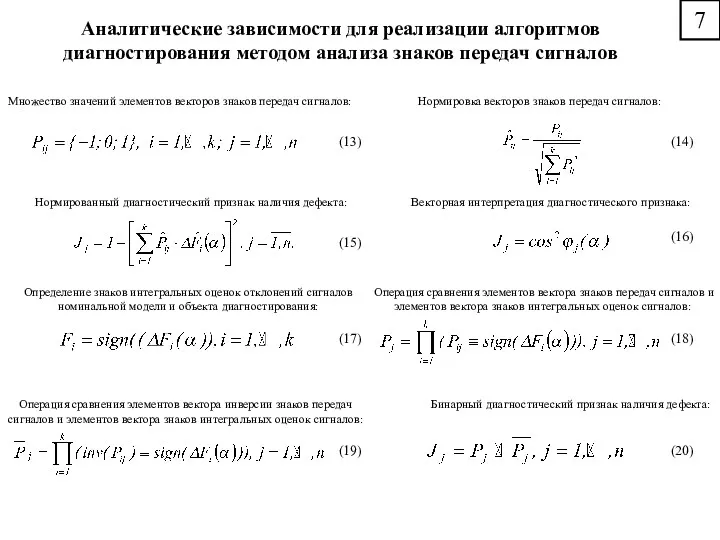
Аналитические зависимости для реализации алгоритмов диагностирования методом анализа знаков передач сигналов
(13)
(14)
(15)
(16)
7
(17)
(18)
(19)
(20)
Множество
Аналитические зависимости для реализации алгоритмов диагностирования методом анализа знаков передач сигналов
(13)
(14)
(15)
(16)
7
(17)
(18)
(19)
(20)
Множество
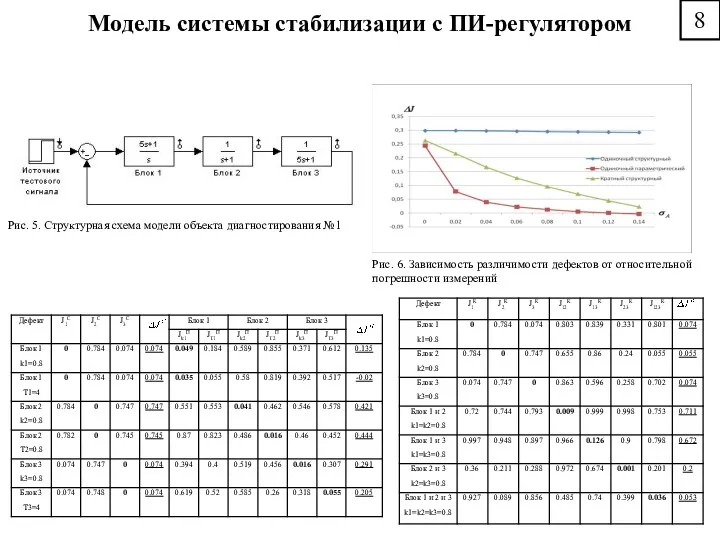
Рис. 5. Структурная схема модели объекта диагностирования №1
Рис. 6. Зависимость различимости
Рис. 5. Структурная схема модели объекта диагностирования №1
Рис. 6. Зависимость различимости
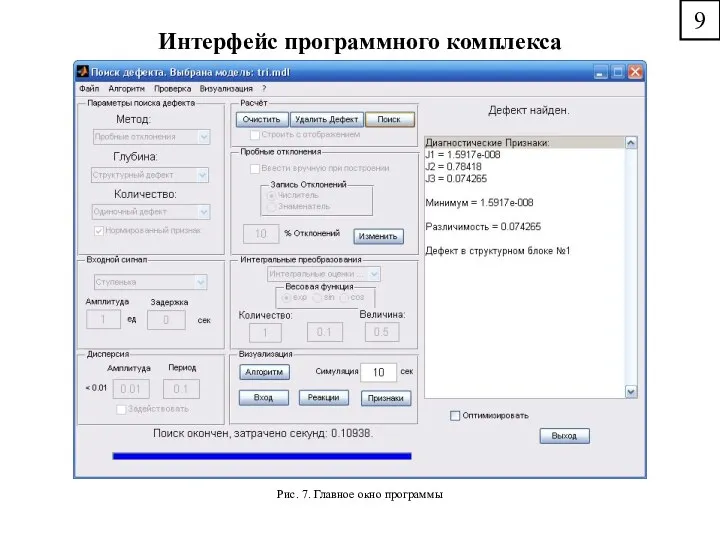
Интерфейс программного комплекса
Рис. 7. Главное окно программы
9
Интерфейс программного комплекса
Рис. 7. Главное окно программы
9
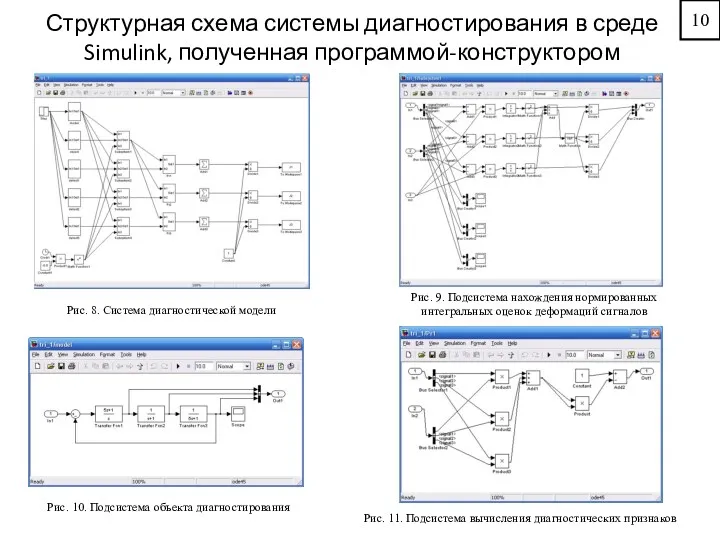
Структурная схема системы диагностирования в среде Simulink, полученная программой-конструктором
Рис. 11. Подсистема
Структурная схема системы диагностирования в среде Simulink, полученная программой-конструктором
Рис. 11. Подсистема
Основные результаты работы:
Разработаны алгоритмы поиска дефектов в системах автоматического управления, основанные
Основные результаты работы:
Разработаны алгоритмы поиска дефектов в системах автоматического управления, основанные

Свидетельства новизны и практической значимости работы
12
Свидетельства новизны и практической значимости работы
12
 Групповая разработка телеграм-бота Помощник в поиске тренера по бегу
Групповая разработка телеграм-бота Помощник в поиске тренера по бегу Programming Logic and Design Seventh Edition
Programming Logic and Design Seventh Edition Опасности в интернете. 5 класс
Опасности в интернете. 5 класс Создание элементов управления
Создание элементов управления Логическая и физическая организация БД. Нормальные формы, свойства нормальных форм
Логическая и физическая организация БД. Нормальные формы, свойства нормальных форм Классификация операционных систем
Классификация операционных систем Трансформації видавничого процесу і продукту в умовах дигіталізації медіакомунікацій
Трансформації видавничого процесу і продукту в умовах дигіталізації медіакомунікацій Современные информационные технологии автоматизации офиса
Современные информационные технологии автоматизации офиса Файл и файловые системы
Файл и файловые системы Правила оформления библиографического аппарата в научных публикациях, курсовых работах и ВКР
Правила оформления библиографического аппарата в научных публикациях, курсовых работах и ВКР Сегменты информационного бизнеса
Сегменты информационного бизнеса Основные и дополнительные устройства компьютера
Основные и дополнительные устройства компьютера Условный алгоритм
Условный алгоритм Создание БД в MS Access
Создание БД в MS Access Программа Cocos
Программа Cocos Программирование на языке Python. Циклические алгоритмы
Программирование на языке Python. Циклические алгоритмы Появление термина Веб 2.0
Появление термина Веб 2.0 Конструкторы. Объектно - ориентированное программирование
Конструкторы. Объектно - ориентированное программирование Техническая система. Лекция 4
Техническая система. Лекция 4 Ветвление и циклы в КУМИРе
Ветвление и циклы в КУМИРе Безопасность серверной части веб-приложений. Часть 2. Урок 1. Методологии поиска уязвимостей
Безопасность серверной части веб-приложений. Часть 2. Урок 1. Методологии поиска уязвимостей Информационные ресурсы для научной работы
Информационные ресурсы для научной работы Защита информации
Защита информации Инструкция по заполнению ЕФС-1
Инструкция по заполнению ЕФС-1 Java. (Лекция 4)
Java. (Лекция 4) Информационные преступления и информационная безопасность
Информационные преступления и информационная безопасность Форматирование текста. Обработка текстовой информации. 7 класс
Форматирование текста. Обработка текстовой информации. 7 класс Тестирование ПО. Документирование результатов тестирования
Тестирование ПО. Документирование результатов тестирования