- Элементарные действия. Энкодеры. Алгоритмические структуры

Содержание
- 2. Движение вперед базовой тележки задается подачей на левый и правый мотор одинаковой скорости В ТРИК Студии
- 3. В 2D модели по умолчанию левый мотор подключен к порту M3, правый – M4 На выпадающем
- 4. Повороты Повороты можно разделить на 3 типа: резкий поворот мощность подается только на одно колесо плавный
- 5. Модели алгоритмов Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это «плохой» подход, так как
- 6. Поставьте галочку в окошко «Сетка». Теперь Вы можете отслеживать точные перемещения модели. (1 клетка = 17,5
- 7. Переменные В TRIK Studio можно ввести свои переменные, используя блок «Функция». Для объявления и инициализации новой
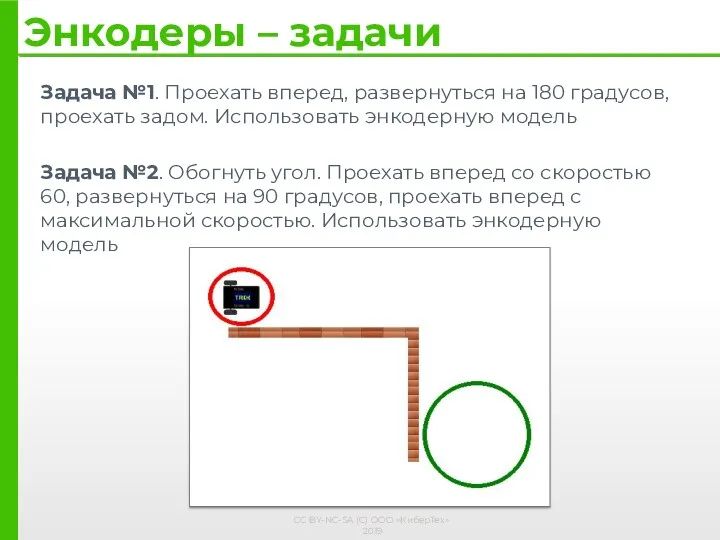
- 8. Энкодеры – задачи Задача №1. Проехать вперед, развернуться на 180 градусов, проехать задом. Использовать энкодерную модель
- 9. Задача 1. Проехать вперед ровно на 1 метр и 5 сантиметров. Использовать энкодерную модель Для этого
- 10. Решение. Для решения этой задачи, необходимо вспомнить элементарные формулы из курса школьной математики: расчет длины окружности
- 11. Самостоятельная задача. Развернуться на месте ровно на 90 градусов. Использовать энкодерную модель Для этого Вам пригодятся
- 12. Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения задачи за конечное число
- 13. Алгоритмические структуры Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только из структур следования,
- 14. Следование
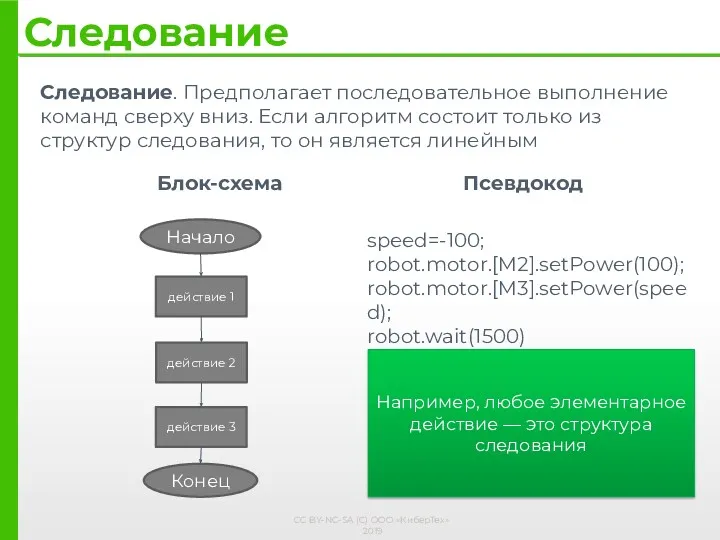
- 15. Следование Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только из структур следования, то
- 16. Следование – задача Задача. Написать алгоритм движения модели «змейкой». Использовать энкодерную модель
- 17. Ветвление
- 18. Ветвление. Выполнение программы идет по одной из двух, нескольких или множества ветвей. Выбор ветви зависит от
- 19. Ветвление Ветвление «если-то» Блок-схема if (encoder.[E2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие Начало действие 1 нет да действие 2
- 20. Ветвление Блок-схема Псевдокод if (encoder.[E2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000); Условие действие 1 Начало действие 2 нет
- 21. Ветвление Блок-схема Псевдокод if (encoder.[E2].read() robot.motor.[M2].setPower(50); elseif robot.motor.[M2].setPower(100); robot.wait(2000); Условие Действие 2 действие 1 нет да
- 22. Ветвление Псевдокод if (encoder.[E2].read() robot.motor.[M2].setPower(50); elseif (encoder.[E2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000); Условие Действие 2 действие 1
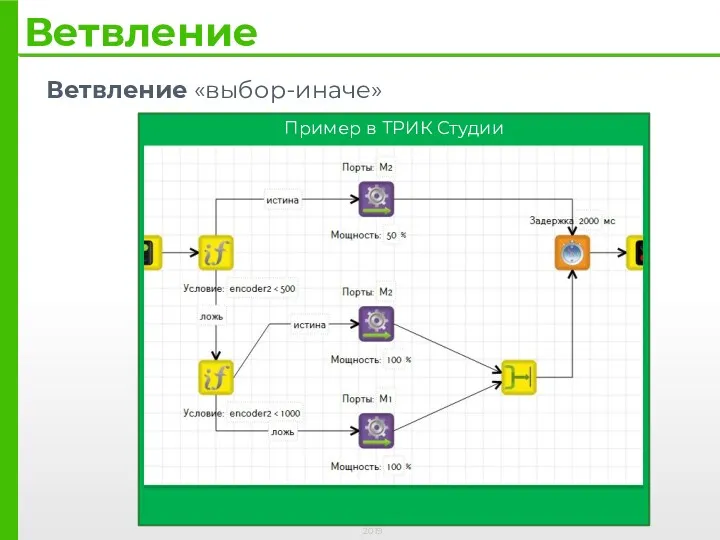
- 23. Ветвление Пример в ТРИК Студии Ветвление «выбор-иначе»
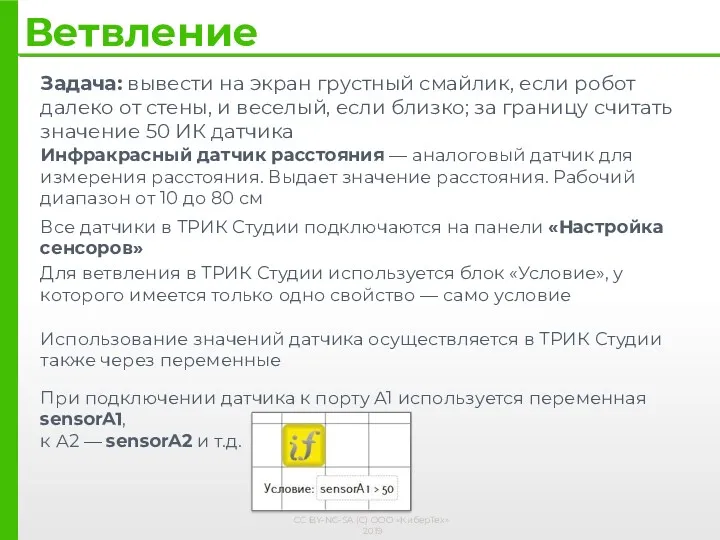
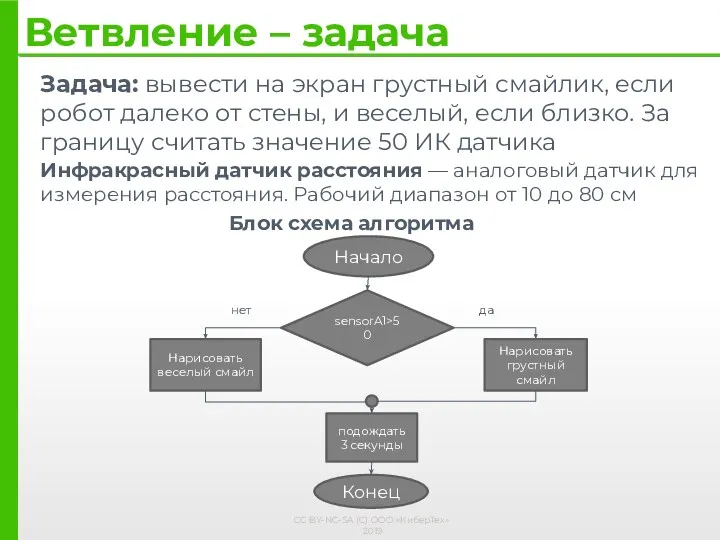
- 24. Ветвление Задача: вывести на экран грустный смайлик, если робот далеко от стены, и веселый, если близко;
- 25. Операторы Операторы сравнения Логические операторы Для задания различных условий роботу необходимы операторы сравнения и логические операторы.
- 26. Ветвление – задача Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния. Рабочий диапазон от 10
- 27. Ветвление – задача Псевдокод if (robot.sensor.[A1].read() > 50) robot.sadSmile(); else robot.smile(); robot.wait(3000); Решение в ТРИК Студии
- 28. Ветвление – задача Задача для самостоятельного решения: вывести на экран: веселый смайлик, если ИК датчик выдает
- 29. Цикл
- 30. Цикл Цикл. Предполагает возможность многократного повторения определенных действий. Количество повторений зависит от условия цикла Существует 4
- 31. Цикл Блок-схема Псевдокод while true do robot.motor.[M2].setPower(100); Пример в TRIK Studio Цикл бесконечный (безусловный) Условие Начало
- 32. Цикл Цикл с итерациями Блок-схема robot.motor.[M3].setPower(100); for (i = 0; i robot.wait(1); robot.motor.[M4].setPower(100); Счетчик с условием
- 33. Цикл Цикл с предусловием Блок-схема while encoder.[E2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие Начало действие 1 нет да действие
- 34. Цикл Цикл с постусловием Блок-схема do robot.motor.[M2].setPower(100); robot.wait(1); while encoder.[E2].read() robot.motor.[M1].setPower(100); Условие Начало действие 1 нет
- 35. Задача «Настроение робота»: выводить на экран веселый смайлик, если робот на черном поле, и грустный, если
- 36. Псевдокод while true do if (robot.sensor.[A1].read() > 50) robot.smile(); else robot.sadSmile(); robot.wait(30); Решение в TRIK Studio
- 37. 2D модель: нарисуйте масляное пятно при помощи инструмента «карандаш». Толщину карандаша задайте «30» Цикл – задача
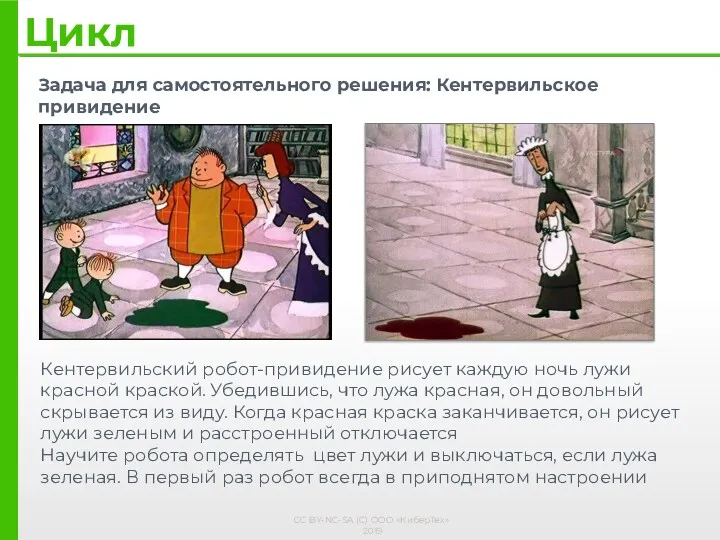
- 38. Задача для самостоятельного решения: Кентервильское привидение Кентервильский робот-привидение рисует каждую ночь лужи красной краской. Убедившись, что
- 39. Задача для самостоятельного решения: Кентервильское привидение Пояснение: выводить на экран: веселый смайлик, если робот видит красную
- 40. Задача: Разгон и торможение Напишите программу: плавный разгон робота в течение 2 секунд, а затем плавное
- 41. Switсh
- 42. Представляет собой структуру, построенную по принципу меню, и содержит все возможные варианты условий и инструкции, которые
- 43. Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я готов к роботе», «Улыбаюсь», «Грущу»,
- 44. Switch – задача Задача: выводить на экран робота в 2D модели по нажатию код кнопок контроллера
- 46. Скачать презентацию
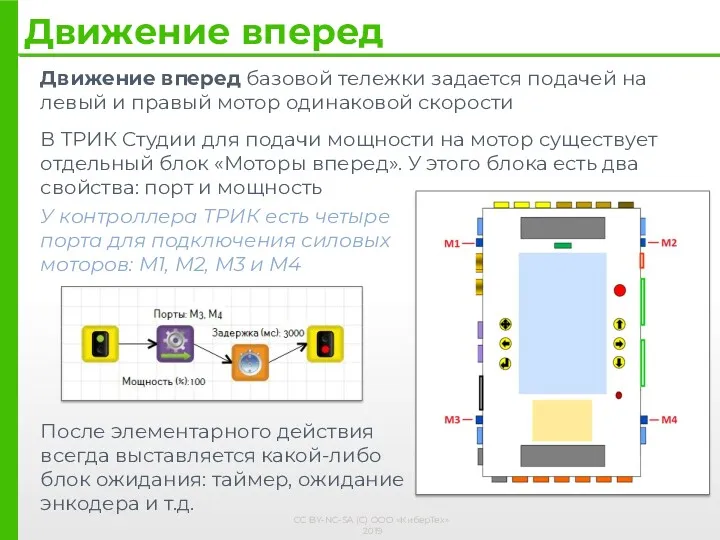
Движение вперед базовой тележки задается подачей на левый и правый мотор
Движение вперед базовой тележки задается подачей на левый и правый мотор
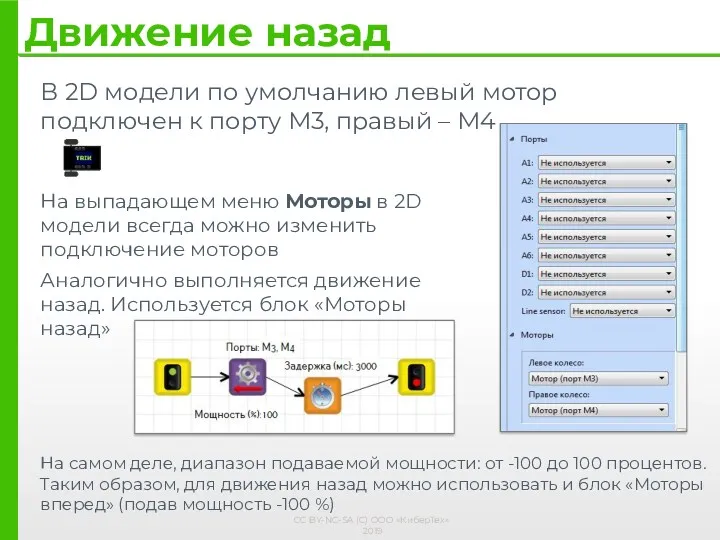
В 2D модели по умолчанию левый мотор подключен к порту M3,
В 2D модели по умолчанию левый мотор подключен к порту M3,

Повороты
Повороты можно разделить на 3 типа:
резкий поворот
мощность подается только на
Повороты
Повороты можно разделить на 3 типа:
резкий поворот
мощность подается только на

Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
Модели алгоритмов
Представленные выше алгоритмы – тайм-модели. Движение осуществляется по таймеру. Это
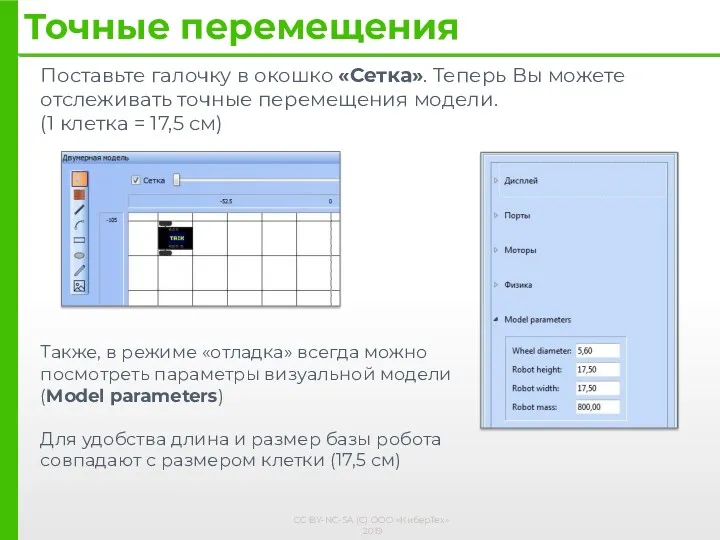
Поставьте галочку в окошко «Сетка». Теперь Вы можете отслеживать точные перемещения
Поставьте галочку в окошко «Сетка». Теперь Вы можете отслеживать точные перемещения

Переменные
В TRIK Studio можно ввести свои переменные, используя блок «Функция». Для
Переменные
В TRIK Studio можно ввести свои переменные, используя блок «Функция». Для
Энкодеры – задачи
Задача №1. Проехать вперед, развернуться на 180 градусов,
Энкодеры – задачи
Задача №1. Проехать вперед, развернуться на 180 градусов,
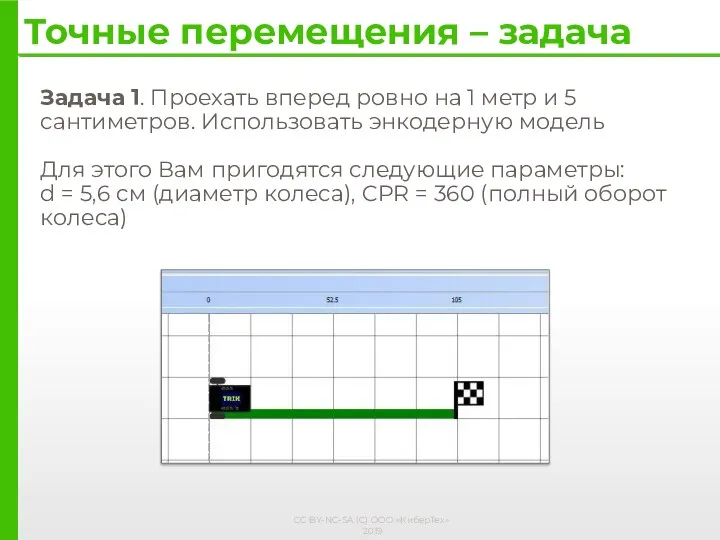
Задача 1. Проехать вперед ровно на 1 метр и 5 сантиметров.
Задача 1. Проехать вперед ровно на 1 метр и 5 сантиметров.
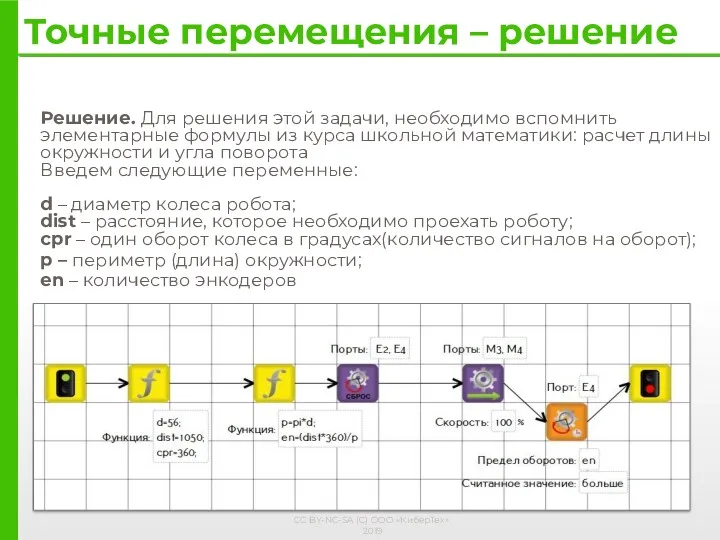
Решение. Для решения этой задачи, необходимо вспомнить элементарные формулы из курса
Решение. Для решения этой задачи, необходимо вспомнить элементарные формулы из курса
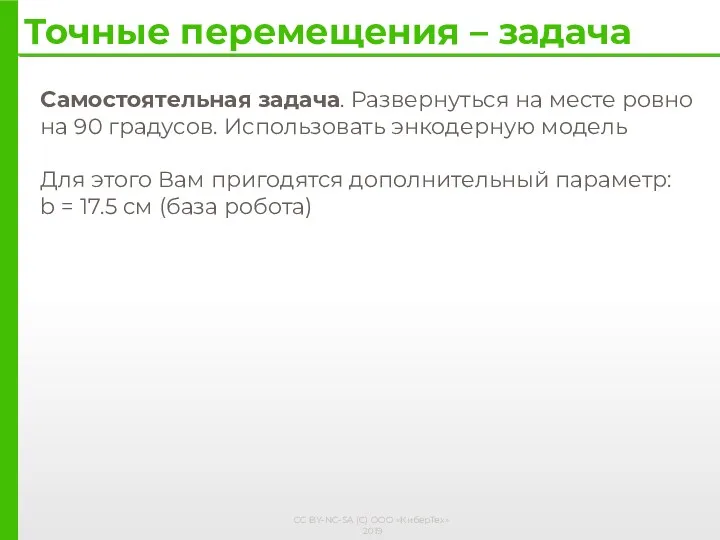
Самостоятельная задача. Развернуться на месте ровно на 90 градусов. Использовать энкодерную
Самостоятельная задача. Развернуться на месте ровно на 90 градусов. Использовать энкодерную
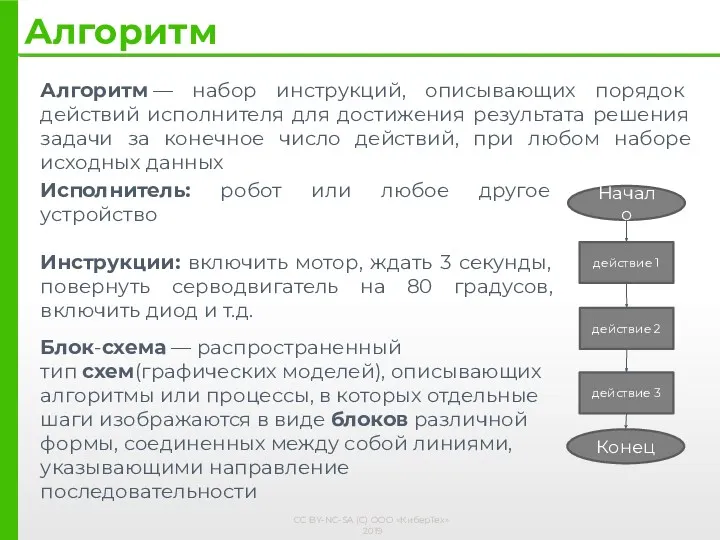
Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения
Алгоритм — набор инструкций, описывающих порядок действий исполнителя для достижения результата решения
Алгоритмические структуры
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит
Алгоритмические структуры
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит
Следование
Следование
Следование
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только
Следование
Следование. Предполагает последовательное выполнение команд сверху вниз. Если алгоритм состоит только

Следование – задача
Задача. Написать алгоритм движения модели «змейкой».
Использовать энкодерную модель
Следование – задача
Задача. Написать алгоритм движения модели «змейкой».
Использовать энкодерную модель
Ветвление
Ветвление
Ветвление. Выполнение программы идет по одной из двух, нескольких или множества
Ветвление. Выполнение программы идет по одной из двух, нескольких или множества
![Ветвление Ветвление «если-то» Блок-схема if (encoder.[E2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие Начало](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-18.jpg)
Ветвление
Ветвление «если-то»
Блок-схема
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в TRIK Studio
Псевдокод
Ветвление
Ветвление «если-то»
Блок-схема
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в TRIK Studio
Псевдокод
![Ветвление Блок-схема Псевдокод if (encoder.[E2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100); robot.wait(2000); Условие](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-19.jpg)
Ветвление
Блок-схема
Псевдокод
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
действие 1
Начало
действие 2
нет
да
действие 3
Конец
Пример в TRIK
Ветвление
Блок-схема
Псевдокод
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
действие 1
Начало
действие 2
нет
да
действие 3
Конец
Пример в TRIK
![Ветвление Блок-схема Псевдокод if (encoder.[E2].read() robot.motor.[M2].setPower(50); elseif robot.motor.[M2].setPower(100); robot.wait(2000); Условие](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-20.jpg)
Ветвление
Блок-схема
Псевдокод
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(50);
elseif
robot.motor.[M2].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие 1
нет
да
действие 3
Пример в TRIK
Ветвление
Блок-схема
Псевдокод
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(50);
elseif
robot.motor.[M2].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие 1
нет
да
действие 3
Пример в TRIK
![Ветвление Псевдокод if (encoder.[E2].read() robot.motor.[M2].setPower(50); elseif (encoder.[E2].read() robot.motor.[M2].setPower(100); else robot.motor.[M1].setPower(100);](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-21.jpg)
Ветвление
Псевдокод
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(50);
elseif (encoder.[E2].read() < 1000)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие
Ветвление
Псевдокод
if (encoder.[E2].read() < 500)
robot.motor.[M2].setPower(50);
elseif (encoder.[E2].read() < 1000)
robot.motor.[M2].setPower(100);
else
robot.motor.[M1].setPower(100);
robot.wait(2000);
Условие
Действие 2
действие
Ветвление
Пример в ТРИК Студии
Ветвление «выбор-иначе»
Ветвление
Пример в ТРИК Студии
Ветвление «выбор-иначе»
Ветвление
Задача: вывести на экран грустный смайлик, если робот далеко от стены,
Ветвление
Задача: вывести на экран грустный смайлик, если робот далеко от стены,

Операторы
Операторы сравнения
Логические операторы
Для задания различных условий роботу необходимы операторы сравнения и
Операторы
Операторы сравнения
Логические операторы
Для задания различных условий роботу необходимы операторы сравнения и
Ветвление – задача
Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния.
Ветвление – задача
Инфракрасный датчик расстояния — аналоговый датчик для измерения расстояния.
![Ветвление – задача Псевдокод if (robot.sensor.[A1].read() > 50) robot.sadSmile(); else](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-26.jpg)
Ветвление – задача
Псевдокод
if (robot.sensor.[A1].read() > 50)
robot.sadSmile();
else
robot.smile();
robot.wait(3000);
Решение в ТРИК
Ветвление – задача
Псевдокод
if (robot.sensor.[A1].read() > 50)
robot.sadSmile();
else
robot.smile();
robot.wait(3000);
Решение в ТРИК

Ветвление – задача
Задача для самостоятельного решения: вывести на экран:
веселый смайлик,
Ветвление – задача
Задача для самостоятельного решения: вывести на экран:
веселый смайлик,
Цикл
Цикл
Цикл
Цикл. Предполагает возможность многократного повторения определенных действий. Количество повторений зависит от
Цикл
Цикл. Предполагает возможность многократного повторения определенных действий. Количество повторений зависит от
![Цикл Блок-схема Псевдокод while true do robot.motor.[M2].setPower(100); Пример в TRIK](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-30.jpg)
Цикл
Блок-схема
Псевдокод
while true do
robot.motor.[M2].setPower(100);
Пример в TRIK Studio
Цикл бесконечный (безусловный)
Условие
Начало
действие 1
В
Цикл
Блок-схема
Псевдокод
while true do
robot.motor.[M2].setPower(100);
Пример в TRIK Studio
Цикл бесконечный (безусловный)
Условие
Начало
действие 1
В
![Цикл Цикл с итерациями Блок-схема robot.motor.[M3].setPower(100); for (i = 0;](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-31.jpg)
Цикл
Цикл с итерациями
Блок-схема
robot.motor.[M3].setPower(100);
for (i = 0; i < 1000; i++)
robot.wait(1);
robot.motor.[M4].setPower(100);
Счетчик
Цикл
Цикл с итерациями
Блок-схема
robot.motor.[M3].setPower(100);
for (i = 0; i < 1000; i++)
robot.wait(1);
robot.motor.[M4].setPower(100);
Счетчик
![Цикл Цикл с предусловием Блок-схема while encoder.[E2].read() robot.motor.[M2].setPower(100); robot.motor.[M1].setPower(100); Условие](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-32.jpg)
Цикл
Цикл с предусловием
Блок-схема
while encoder.[E2].read() < 500 do
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в
Цикл
Цикл с предусловием
Блок-схема
while encoder.[E2].read() < 500 do
robot.motor.[M2].setPower(100);
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример в
![Цикл Цикл с постусловием Блок-схема do robot.motor.[M2].setPower(100); robot.wait(1); while encoder.[E2].read()](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-33.jpg)
Цикл
Цикл с постусловием
Блок-схема
do
robot.motor.[M2].setPower(100);
robot.wait(1);
while encoder.[E2].read() < 500
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример
Цикл
Цикл с постусловием
Блок-схема
do
robot.motor.[M2].setPower(100);
robot.wait(1);
while encoder.[E2].read() < 500
robot.motor.[M1].setPower(100);
Условие
Начало
действие 1
нет
да
действие 2
Конец
Пример

Задача «Настроение робота»: выводить на экран веселый смайлик, если робот на
Задача «Настроение робота»: выводить на экран веселый смайлик, если робот на
![Псевдокод while true do if (robot.sensor.[A1].read() > 50) robot.smile(); else](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/180089/slide-35.jpg)
Псевдокод
while true do
if (robot.sensor.[A1].read() > 50)
robot.smile();
else
robot.sadSmile();
Псевдокод
while true do
if (robot.sensor.[A1].read() > 50)
robot.smile();
else
robot.sadSmile();
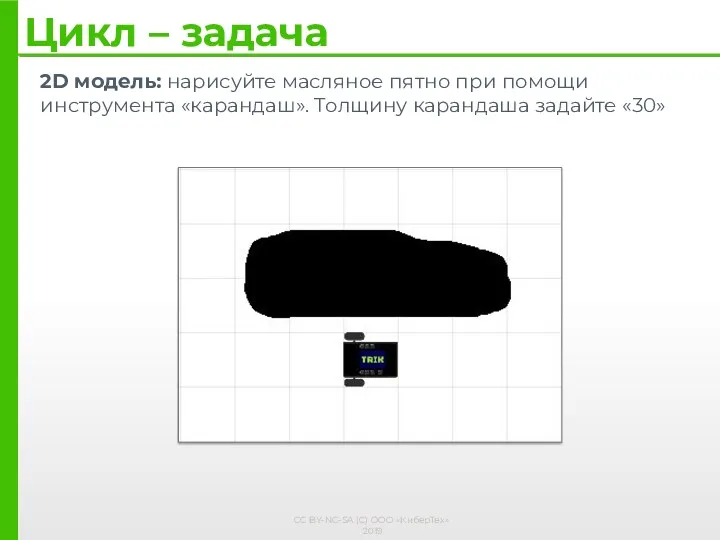
2D модель: нарисуйте масляное пятно при помощи инструмента «карандаш». Толщину карандаша
2D модель: нарисуйте масляное пятно при помощи инструмента «карандаш». Толщину карандаша
Задача для самостоятельного решения: Кентервильское привидение
Кентервильский робот-привидение рисует каждую ночь лужи
Задача для самостоятельного решения: Кентервильское привидение
Кентервильский робот-привидение рисует каждую ночь лужи

Задача для самостоятельного решения: Кентервильское привидение
Пояснение:
выводить на экран:
веселый смайлик, если
Задача для самостоятельного решения: Кентервильское привидение
Пояснение:
выводить на экран:
веселый смайлик, если
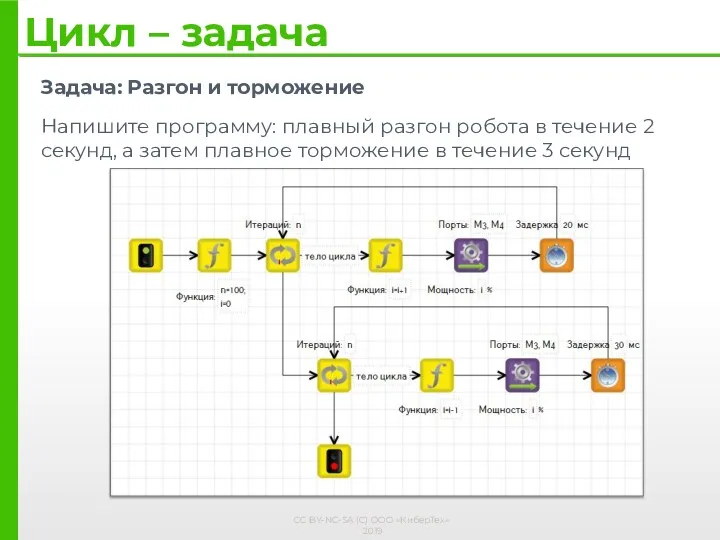
Задача: Разгон и торможение
Напишите программу: плавный разгон робота в течение 2
Задача: Разгон и торможение
Напишите программу: плавный разгон робота в течение 2

Switсh
Switсh
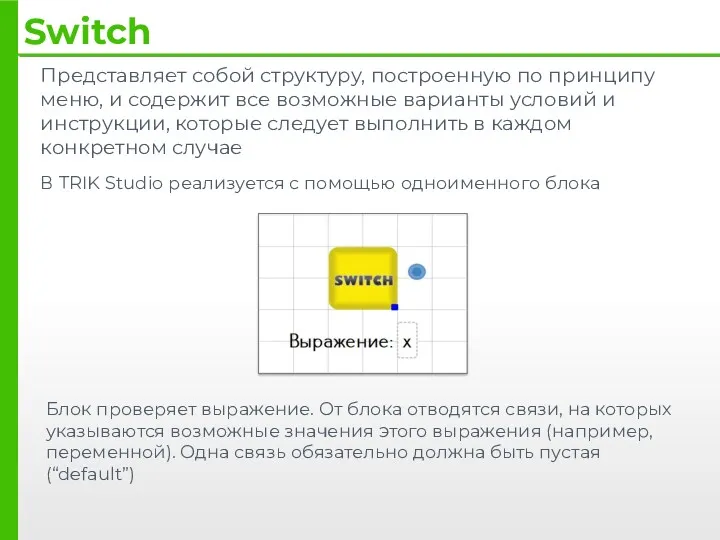
Представляет собой структуру, построенную по принципу меню, и содержит все возможные
Представляет собой структуру, построенную по принципу меню, и содержит все возможные
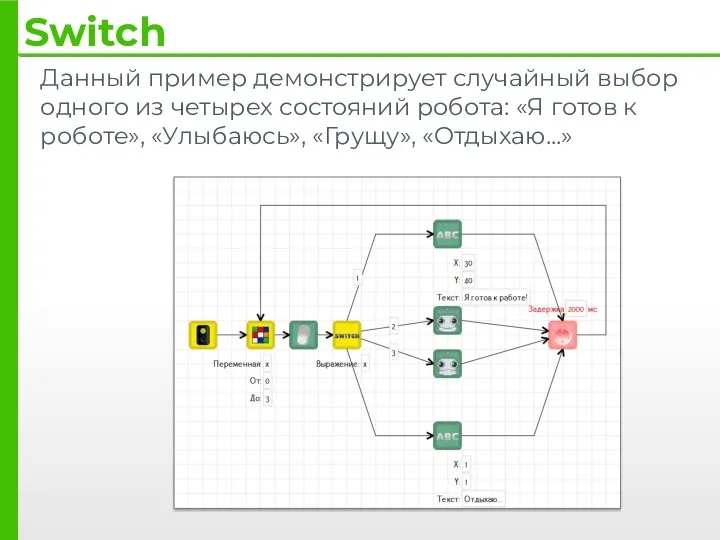
Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я
Данный пример демонстрирует случайный выбор одного из четырех состояний робота: «Я

Switch – задача
Задача: выводить на экран робота в 2D модели по
Switch – задача
Задача: выводить на экран робота в 2D модели по
 Система самообслуживания клиентов
Система самообслуживания клиентов Қатты диск құрылысы. Жинақтауыштың негізгі түйіндері
Қатты диск құрылысы. Жинақтауыштың негізгі түйіндері Язык программирования Паскаль. Основные понятия
Язык программирования Паскаль. Основные понятия Организационное и правовое обеспечение информационной безопасности
Организационное и правовое обеспечение информационной безопасности Игра по информатике Умники и умницы
Игра по информатике Умники и умницы Модели данных
Модели данных Аналіз складних об’єктів і систем. Аналітичні дослідження
Аналіз складних об’єктів і систем. Аналітичні дослідження Чек-лист по загрузке и продвижению видео на Instagram
Чек-лист по загрузке и продвижению видео на Instagram Линейные алгоритмы обработки целочисленных данных
Линейные алгоритмы обработки целочисленных данных Паттерны проектирования (Design patterns)
Паттерны проектирования (Design patterns) Альтернативный интернет
Альтернативный интернет Модель КИМ ОГЭ по информатике в 2020 году
Модель КИМ ОГЭ по информатике в 2020 году Корпоративный документооборот. Классификаия документов. (Тема 2)
Корпоративный документооборот. Классификаия документов. (Тема 2) CSS. Группировка. Идентификаторы. Классы. Псевдоклассы и псевдоэлементы
CSS. Группировка. Идентификаторы. Классы. Псевдоклассы и псевдоэлементы Алгоритмы и структуры данных. Класс. Объект. Свойства и методы
Алгоритмы и структуры данных. Класс. Объект. Свойства и методы Автоматизация системы управления технологическими процессами в компании ООО Скиф-Аналит
Автоматизация системы управления технологическими процессами в компании ООО Скиф-Аналит Прототип мобильного приложения для обучения правильной технике свинга при помощи AI
Прототип мобильного приложения для обучения правильной технике свинга при помощи AI Разработка набора тестов для проверки соответствия стандарту DOM Level 3 Core
Разработка набора тестов для проверки соответствия стандарту DOM Level 3 Core Воронка продаж со 100% гарантией
Воронка продаж со 100% гарантией Кодирование графической информации
Кодирование графической информации Компьютер как унивесальное устройство для работы с информацией. 7 класс
Компьютер как унивесальное устройство для работы с информацией. 7 класс Инструменты разработки интернет-систем
Инструменты разработки интернет-систем Комплексная автоматизированная система учёта, контроля устранения отказов технических средств и анализа их надежности (Касант)
Комплексная автоматизированная система учёта, контроля устранения отказов технических средств и анализа их надежности (Касант) Основні поняття реляційної моделі даних
Основні поняття реляційної моделі даних Применение информационных технологий и систем автоматизированного проектирования в машиностроении
Применение информационных технологий и систем автоматизированного проектирования в машиностроении Телеграмм Бот
Телеграмм Бот Абсолютные, относительные и смешанные ссылки в электронных таблицах
Абсолютные, относительные и смешанные ссылки в электронных таблицах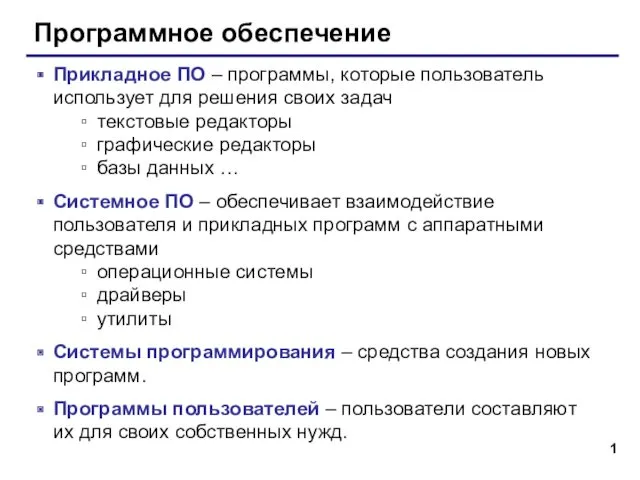 Программное обеспечение
Программное обеспечение