Функциональная схема объектно-ориентированного программно-математического обеспечения для беспилотных летательных аппаратов презентация
- Функциональная схема объектно-ориентированного программно-математического обеспечения для беспилотных летательных аппаратов

Содержание
- 2. Отводимое время на занятие 90 минут Знать: моделирование неуправляемого движения летательных аппаратов; моделирование бортового измерительного комплекса;
- 3. 1. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий. Под ред. М.
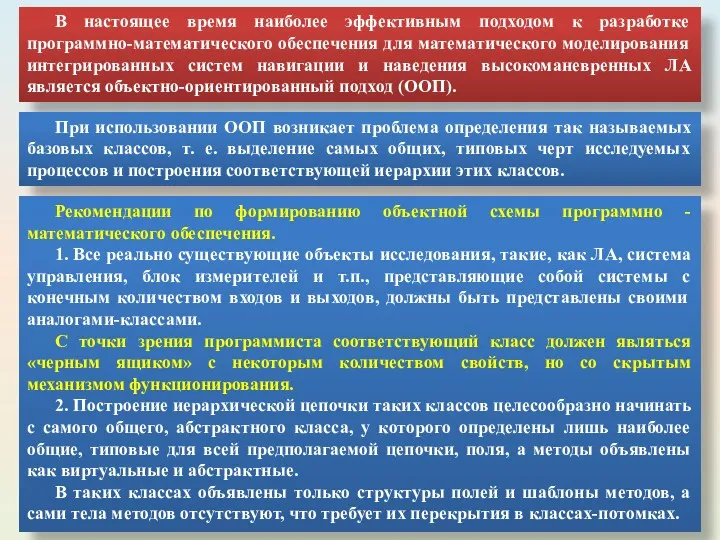
- 4. В настоящее время наиболее эффективным подходом к разработке программно-математического обеспечения для математического моделирования интегрированных систем навигации
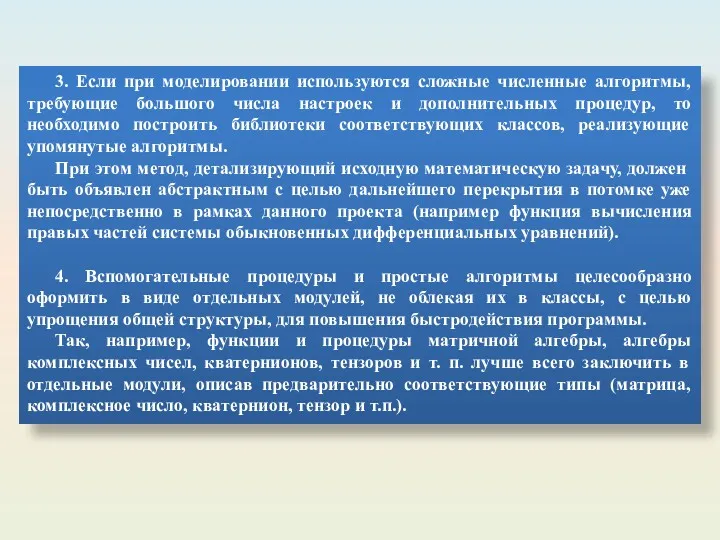
- 5. 3. Если при моделировании используются сложные численные алгоритмы, требующие большого числа настроек и дополнительных процедур, то
- 6. 5. Если исследуемые процессы обладают вложенностью, (один процесс связан непосредственно или косвенно с несколькими другими) то
- 7. Для построения функциональной схемы ПМО, предназначенного для математического моделирования интегрированных бортовых систем навигации и наведения высокоманевренных
- 8. ВОПРОС 1 Моделирование неуправляемого движения летательных аппаратов
- 9. Блок "Летательный Аппарат" описывает динамику высокоманевренного беспилотного ЛА (как центра масс, так и углового движения) под
- 10. Рассмотрим цепочку классов, реализующих библиотеку методов численного интегрирования систем обыкновенных дифференциальных уравнений. Библиотека методов численного интегрирования
- 11. Основным классом-предком для всей цепочки будет являться абстрактный класс ТIntegrator, объединяющий в себе самые общие черты
- 13. Таким образом в приведенном абстрактном классе представлены основные "обобщенные" черты и методы всей иерархии классов, реализующих
- 14. Кроме того, непосредственно от класса TIntegrator образован класс ТSimple Adams, реализующий простейший метод прогноза-коррекции Адамса-Мултона-Башфорта первого
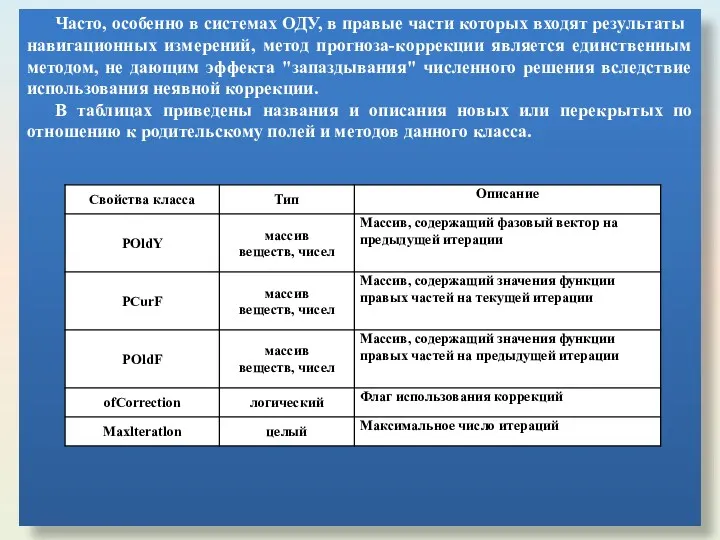
- 15. Часто, особенно в системах ОДУ, в правые части которых входят результаты навигационных измерений, метод прогноза-коррекции является
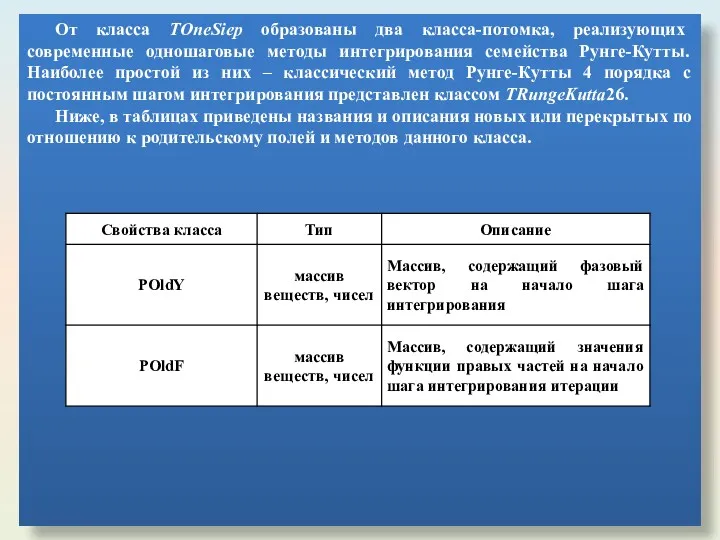
- 17. От класса TOneSiep образованы два класса-потомка, реализующих современные одношаговые методы интегрирования семейства Рунге-Кутты. Наиболее простой из
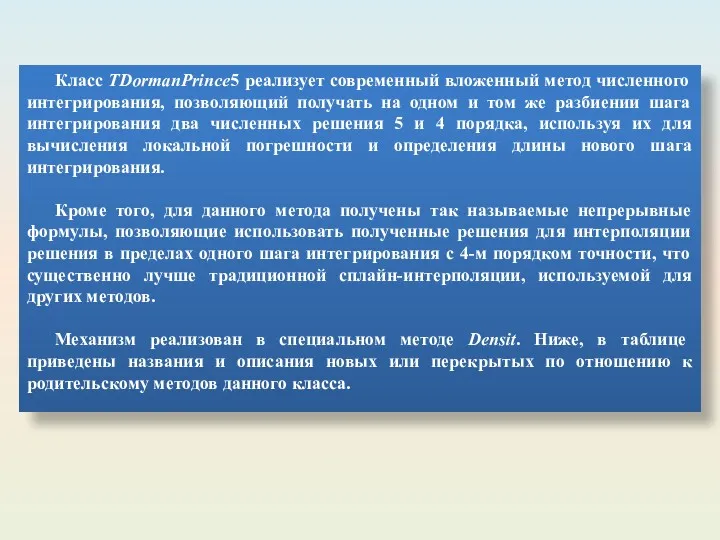
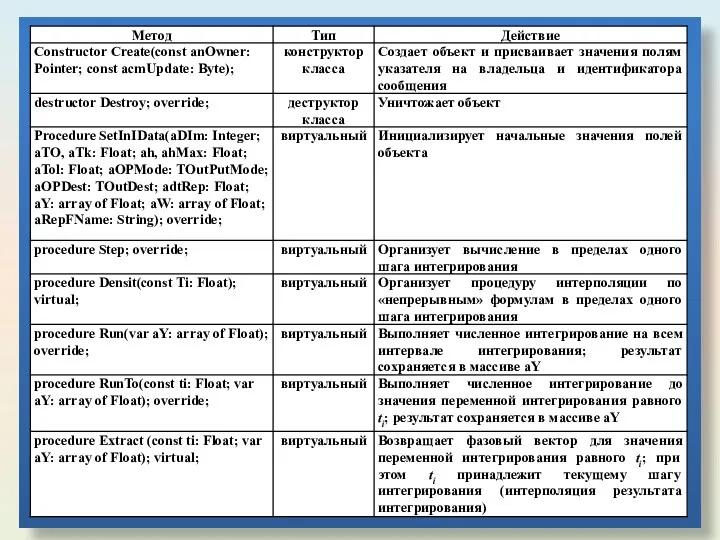
- 19. Класс TDormanPrince5 реализует современный вложенный метод численного интегрирования, позволяющий получать на одном и том же разбиении
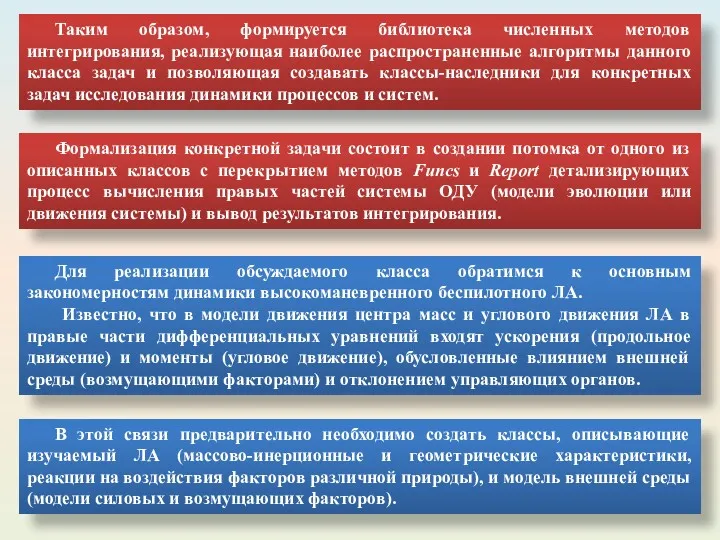
- 21. Таким образом, формируется библиотека численных методов интегрирования, реализующая наиболее распространенные алгоритмы данного класса задач и позволяющая
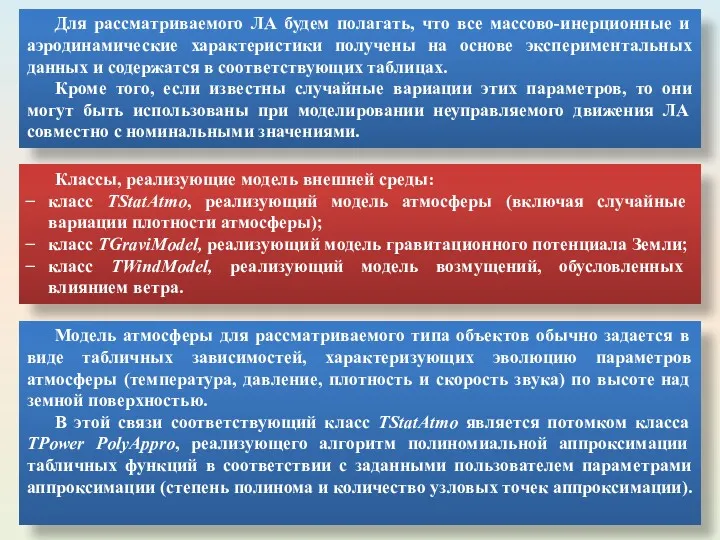
- 22. Для рассматриваемого ЛА будем полагать, что все массово-инерционные и аэродинамические характеристики получены на основе экспериментальных данных
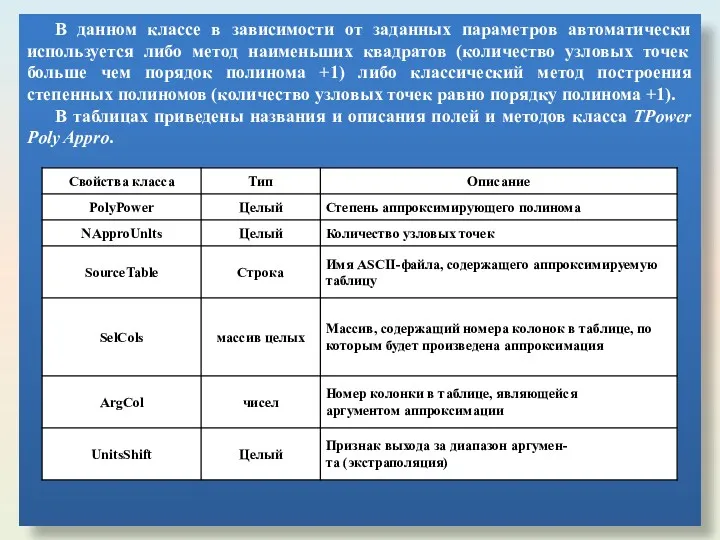
- 23. В данном классе в зависимости от заданных параметров автоматически используется либо метод наименьших квадратов (количество узловых
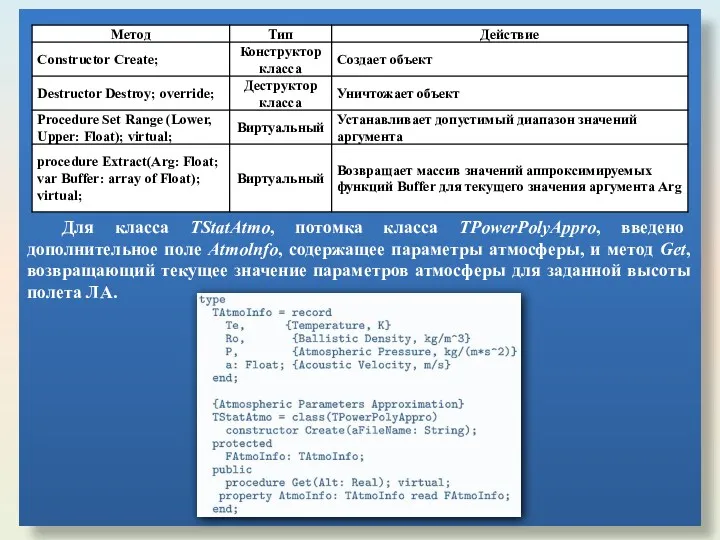
- 24. Для класса TStatAtmo, потомка класса TPowerPolyAppro, введено дополнительное поле Atmolnfo, содержащее параметры атмосферы, и метод Get,
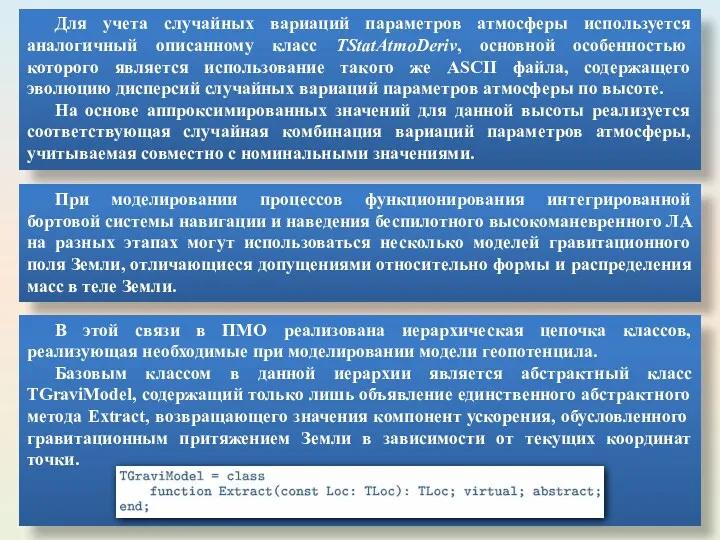
- 25. Для учета случайных вариаций параметров атмосферы используется аналогичный описанному класс TStatAtmoDeriv, основной особенностью которого является использование
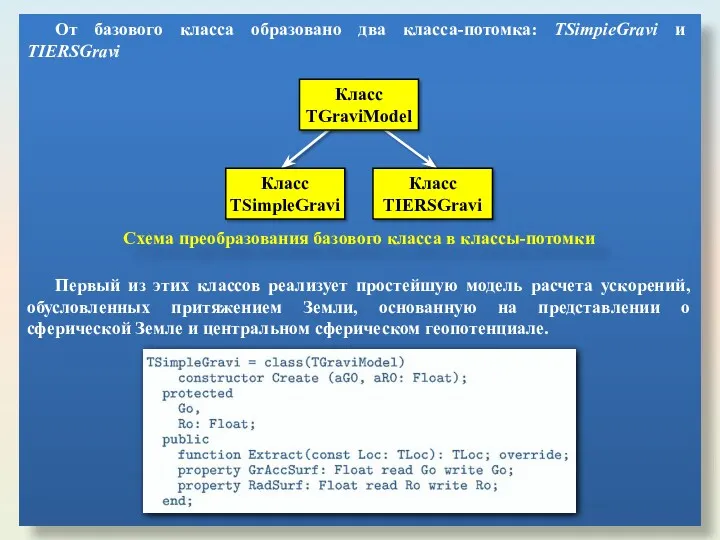
- 26. От базового класса образовано два класса-потомка: TSimpieGravi и TIERSGravi Схема преобразования базового класса в классы-потомки Первый
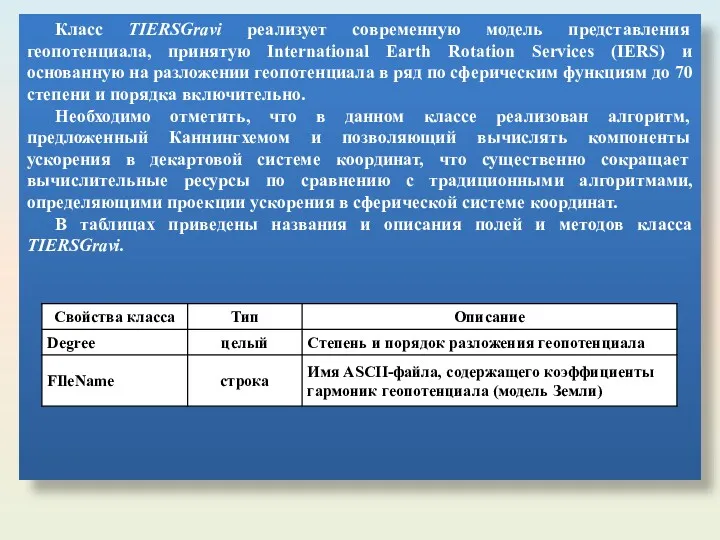
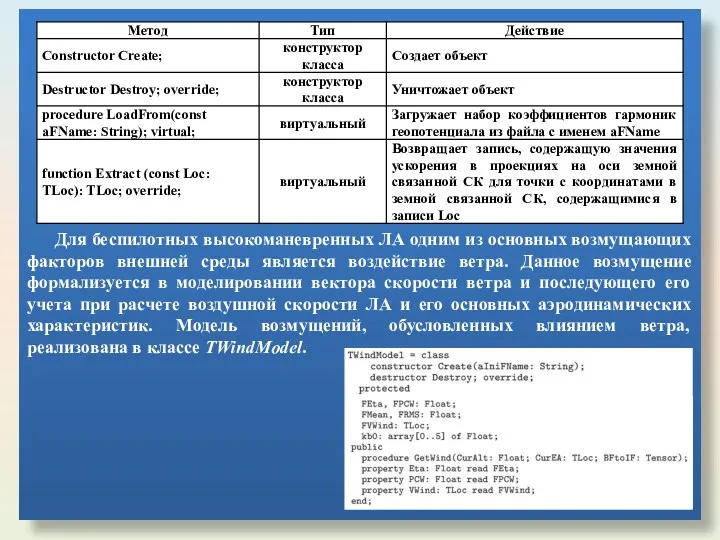
- 27. Класс TIERSGravi реализует современную модель представления геопотенциала, принятую International Earth Rotation Services (IERS) и основанную на
- 28. Для беспилотных высокоманевренных ЛА одним из основных возмущающих факторов внешней среды является воздействие ветра. Данное возмущение
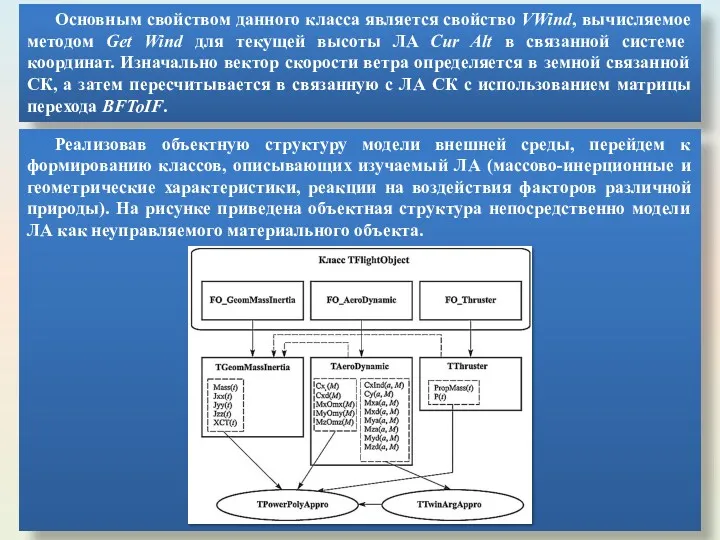
- 29. Основным свойством данного класса является свойство VWind, вычисляемое методом Get Wind для текущей высоты ЛA Cur
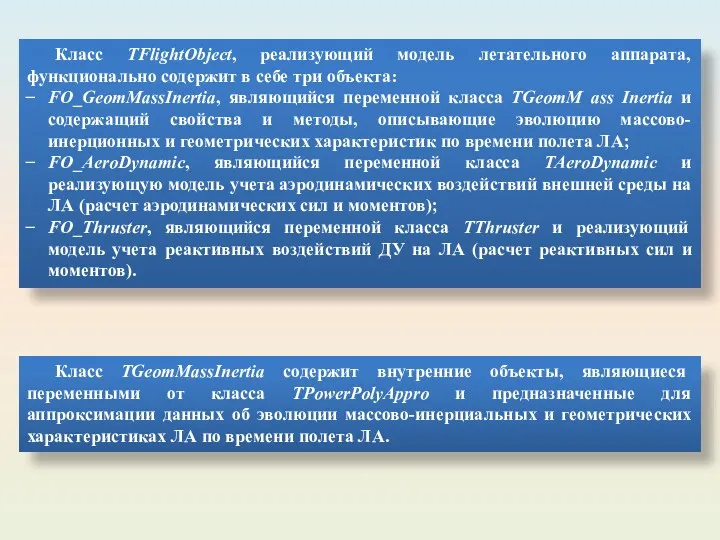
- 30. Класс TFlightObject, реализующий модель летательного аппарата, функционально содержит в себе три объекта: FО_GeomMassInertia, являющийся переменной класса
- 31. Текущая информация сохраняется в поле GMIInfo, представляющее собой запись следующего вида: Тогда объявление класса TGeomMassInertia выглядит
- 32. Метод GetInfo вычисляет для текущего момента времени ti текущие массовоинерционные и геометрические характеристики ЛА и сохраняет
- 33. Каждый объект, которому необходимо проинициализировать свои исходные данные, обращается к единому ini-файлу и считывает значения необходимых
- 34. Причем, если коэффициент зависит только от одного параметра (например числа Маха М), то соответствующий объект является
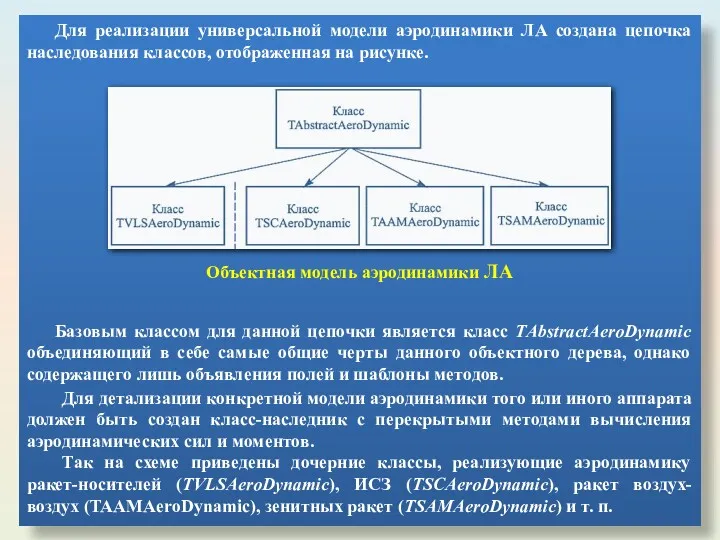
- 35. Для реализации универсальной модели аэродинамики ЛА создана цепочка наследования классов, отображенная на рисунке. Объектная модель аэродинамики
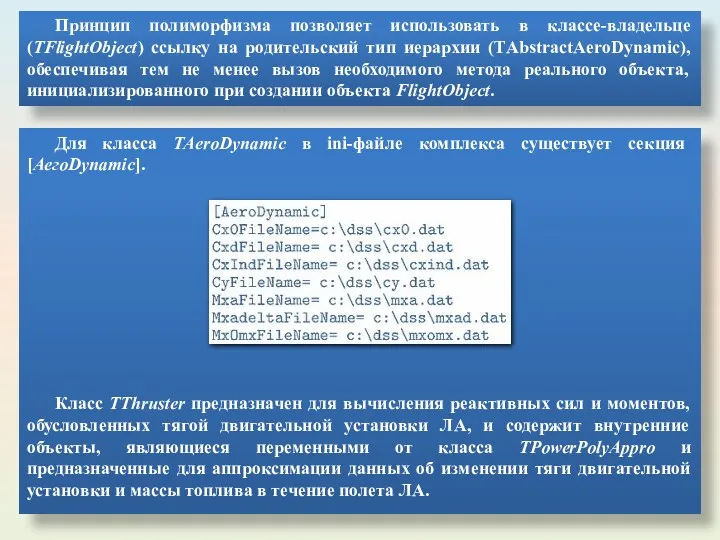
- 36. Принцип полиморфизма позволяет использовать в классе-владельце (TFlightObject) ссылку на родительский тип иерархии (ТAbstractAeroDynamic), обеспечивая тем не
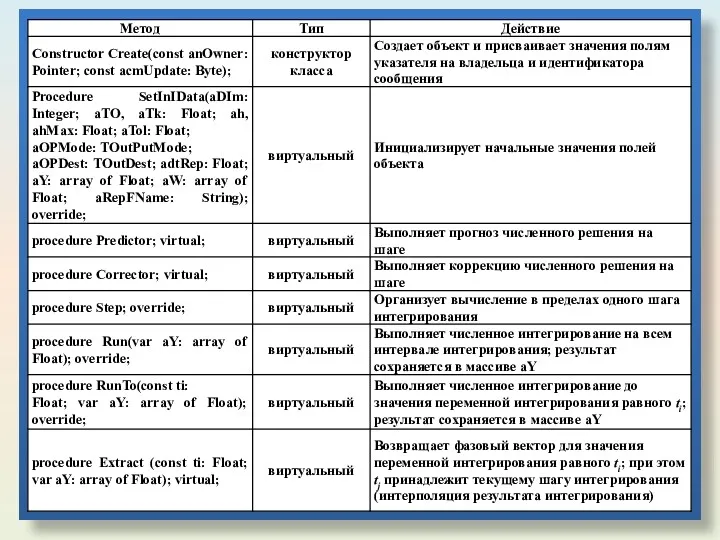
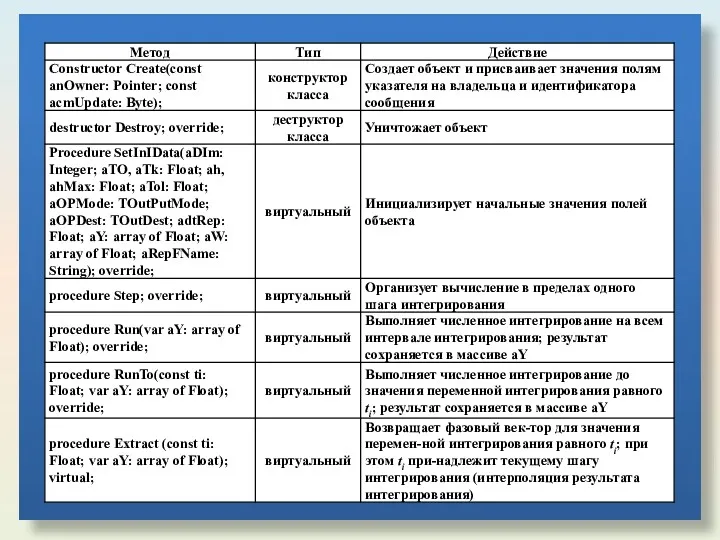
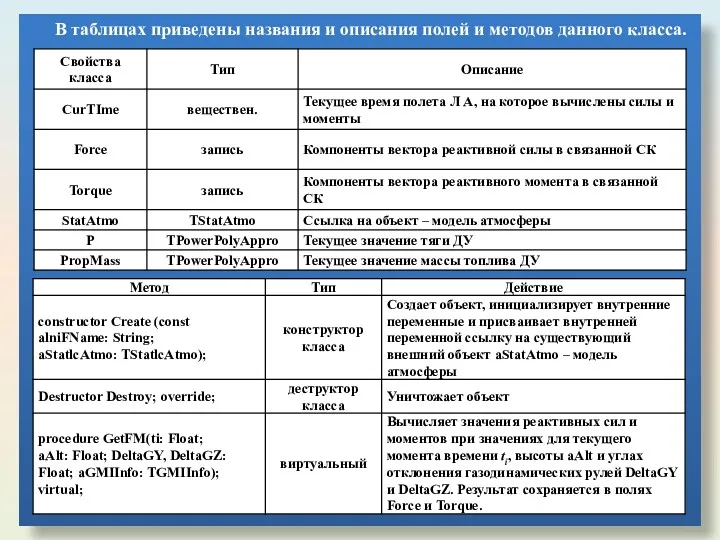
- 37. В таблицах приведены названия и описания полей и методов данного класса.
- 38. Для класса TThruster в ini-файле комплекса существует секция [Thruster]. Как видно из приведенной объектной структуры, для
- 39. Для класса ТFlightObeject в ini-файле комплекса существует секция [Initial Conditions], задающая начальные условия для параметров движения
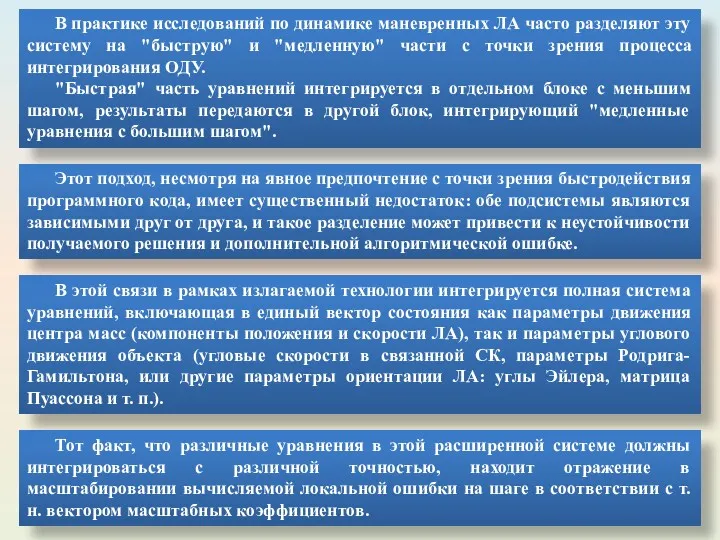
- 40. В практике исследований по динамике маневренных ЛА часто разделяют эту систему на "быструю" и "медленную" части
- 41. Компоненты вектора подобраны таким образом, чтобы обеспечить лучшую необходимую точность вычислений для компонент вектора состояния, соответствующих
- 42. Кроме того данный класс содержит внутреннее поле типа TFlightObject и указывает на реально существующий объект данного
- 43. Для данного класса в ini-файле комплекса существует секция [Integrator], задающая исходные данные для интегрирования. [Integrator] WLoc
- 44. ВОПРОС 2 Моделирование бортового измерительного комплекса
- 45. Бортовой измерительный комплекс маневренного ЛА включает в себя, как правило, блок чувствительных элементов ориентации в пространстве
- 46. Рассмотрим цепочку классов, реализующих библиотеку моделей измерительных устройств БИК Все измерительные устройства имеют общего абстрактного предка
- 47. В этой связи, прежде чем привести описание классов, реализующих модели измерителей, обратимся к цепочке классов, описывающих
- 48. Как видно из приведенных таблиц, в данном классе отсутствует непосредственно алгоритм вычисления вектора ошибок (методы GetMaxError
- 49. Дальнейшим развитием базового класса является класс-потомок TUniformError, реализующий вычисление вектора ошибок в соответствии с равномерным распределением
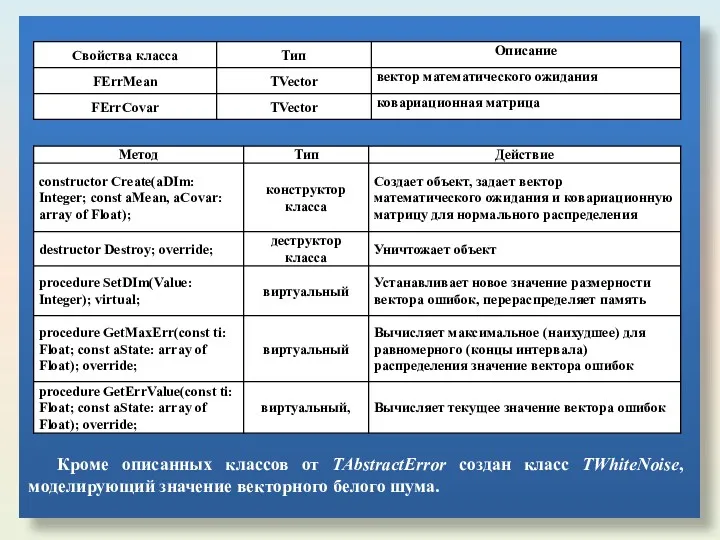
- 50. Кроме описанных классов от TAbstractError создан класс TWhiteNoise, моделирующий значение векторного белого шума.
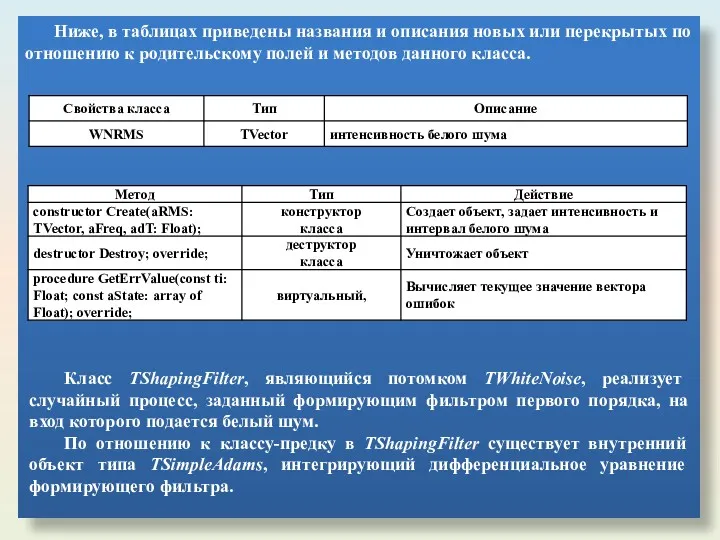
- 51. Ниже, в таблицах приведены названия и описания новых или перекрытых по отношению к родительскому полей и
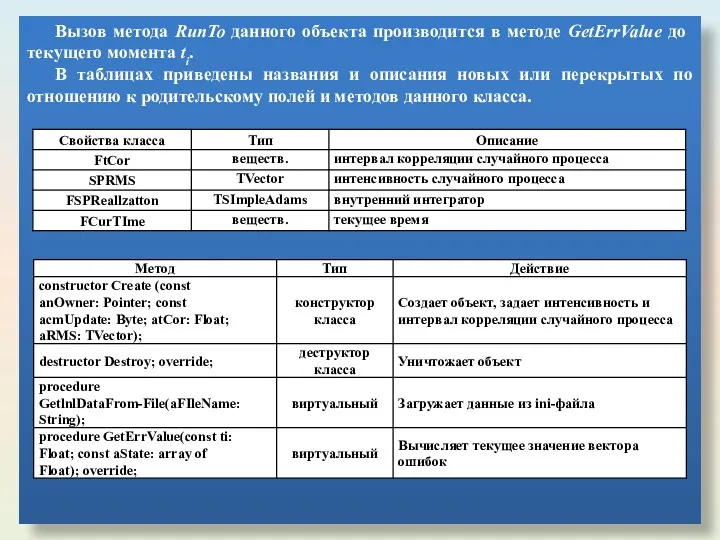
- 52. Вызов метода RunTo данного объекта производится в методе GetErrValue до текущего момента ti. В таблицах приведены
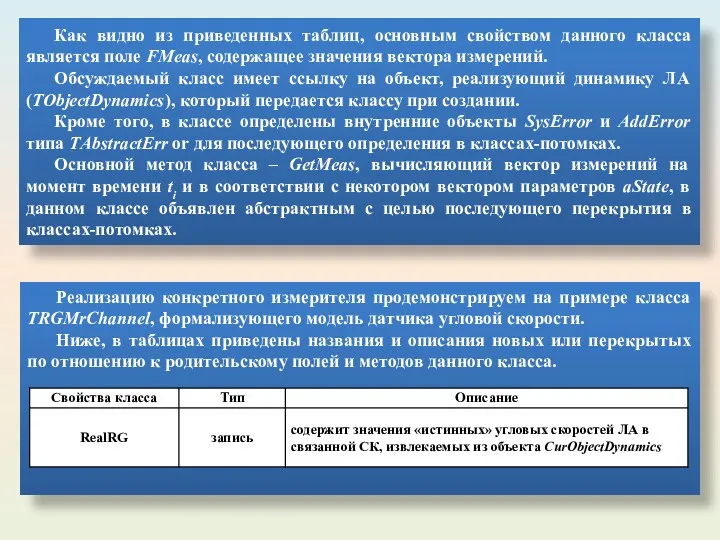
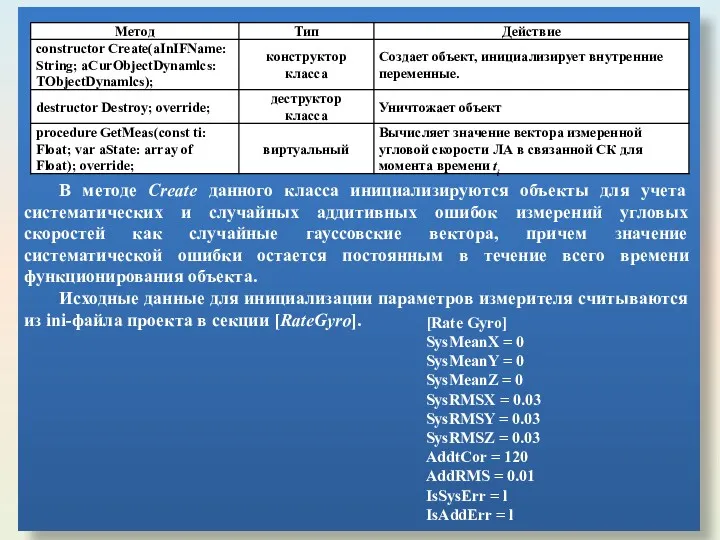
- 53. Как видно из приведенных таблиц, основным свойством данного класса является поле FMeas, содержащее значения вектора измерений.
- 54. В методе Create данного класса инициализируются объекты для учета систематических и случайных аддитивных ошибок измерений угловых
- 55. "Истинные" значения угловой скорости ЛА запрашиваются в методе GetMeas на текущий момент времени ti у объекта
- 56. ВОПРОС 3 Моделирование блока навигации и управления
- 57. Как уже отмечалось выше, бортовая интегрированная система управления и навигации беспилотного маневренного ЛА включает, как правило,
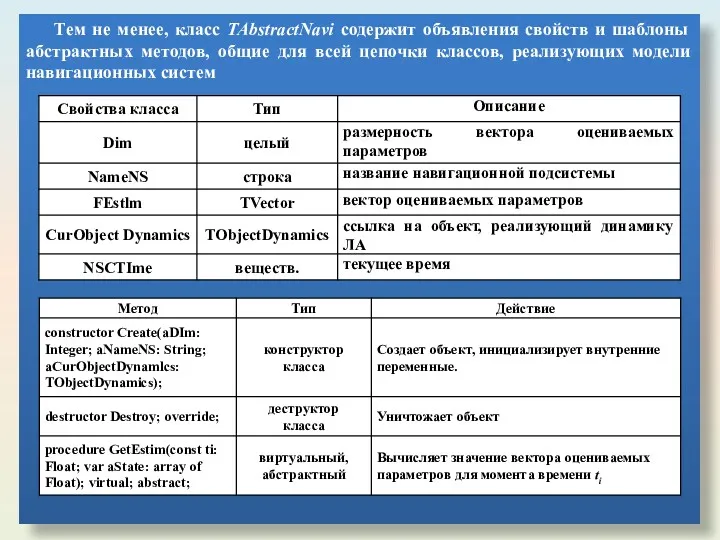
- 58. Тем не менее, класс TAbstractNavi содержит объявления свойств и шаблоны абстрактных методов, общие для всей цепочки
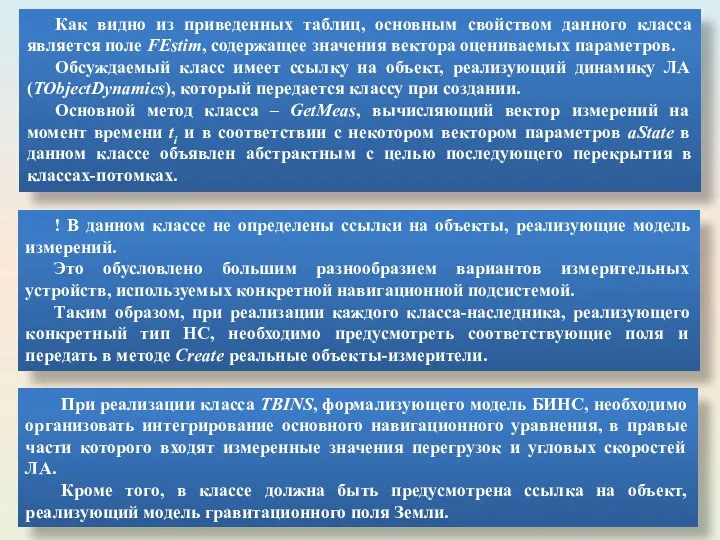
- 59. Как видно из приведенных таблиц, основным свойством данного класса является поле FEstim, содержащее значения вектора оцениваемых
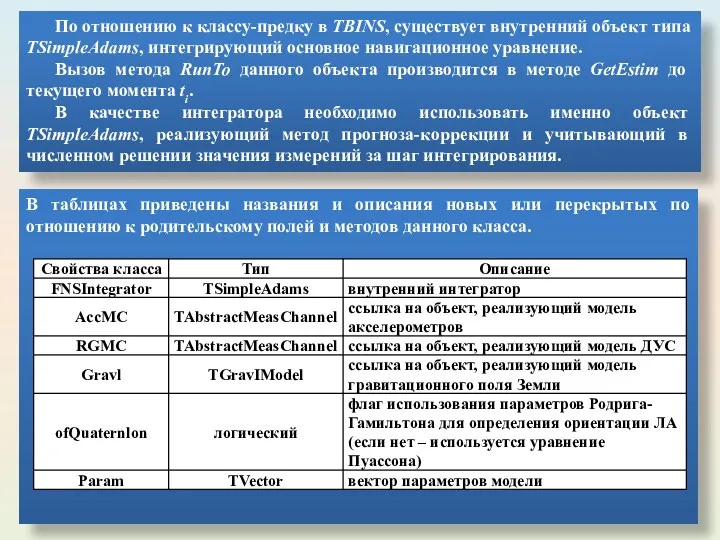
- 60. По отношению к классу-предку в TBINS, существует внутренний объект типа ТSimpleAdams, интегрирующий основное навигационное уравнение. Вызов
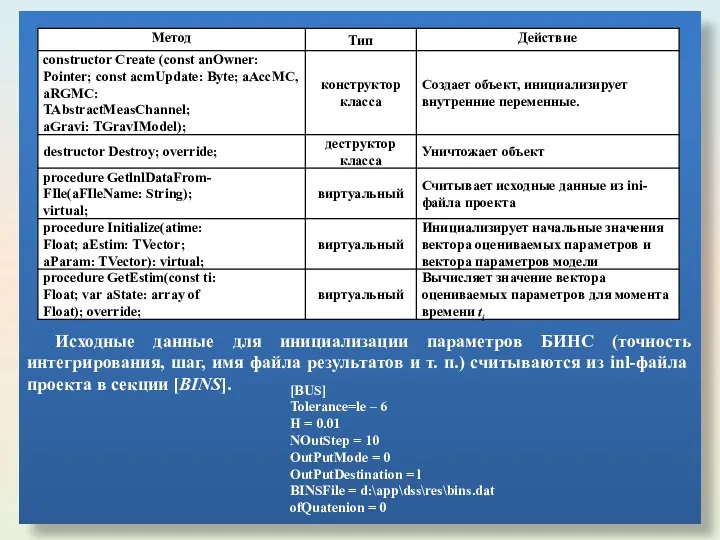
- 61. Исходные данные для инициализации параметров БИНС (точность интегрирования, шаг, имя файла результатов и т. п.) считываются
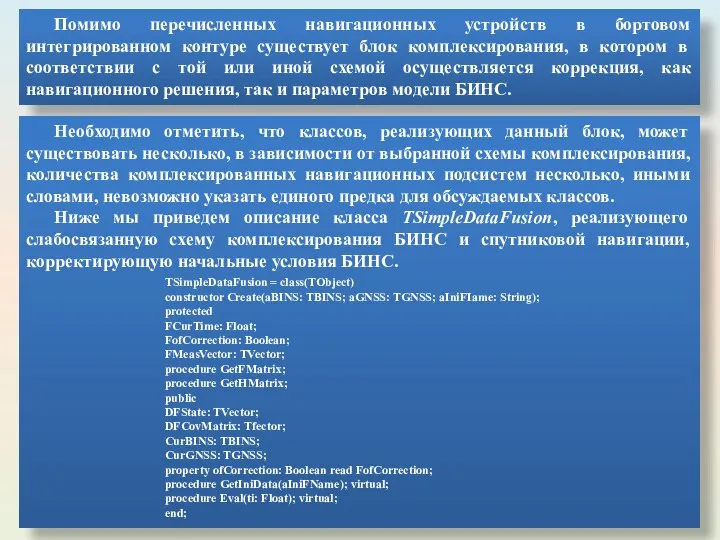
- 62. Помимо перечисленных навигационных устройств в бортовом интегрированном контуре существует блок комплексирования, в котором в соответствии с
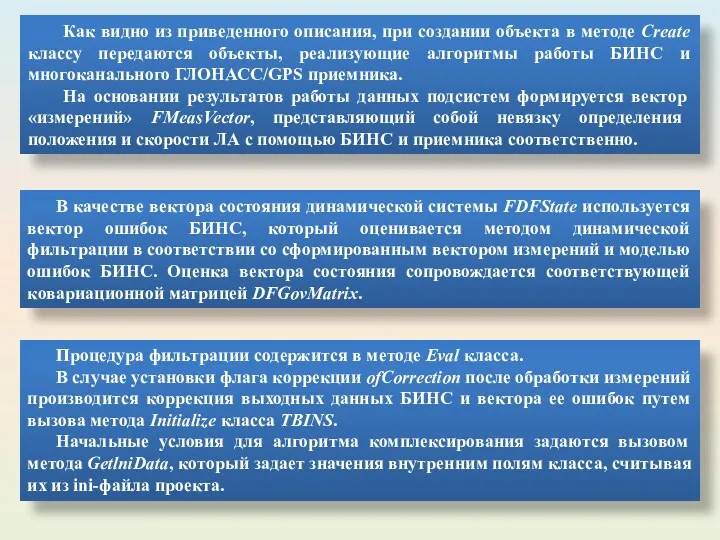
- 63. Как видно из приведенного описания, при создании объекта в методе Create классу передаются объекты, реализующие алгоритмы
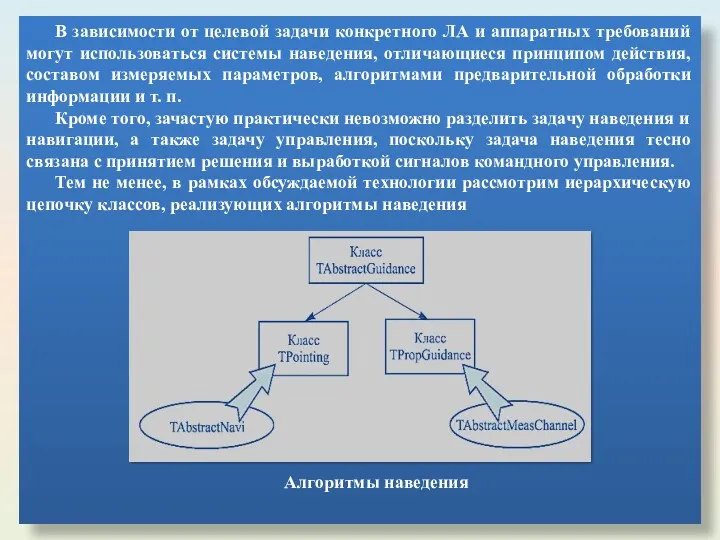
- 64. В зависимости от целевой задачи конкретного ЛА и аппаратных требований могут использоваться системы наведения, отличающиеся принципом
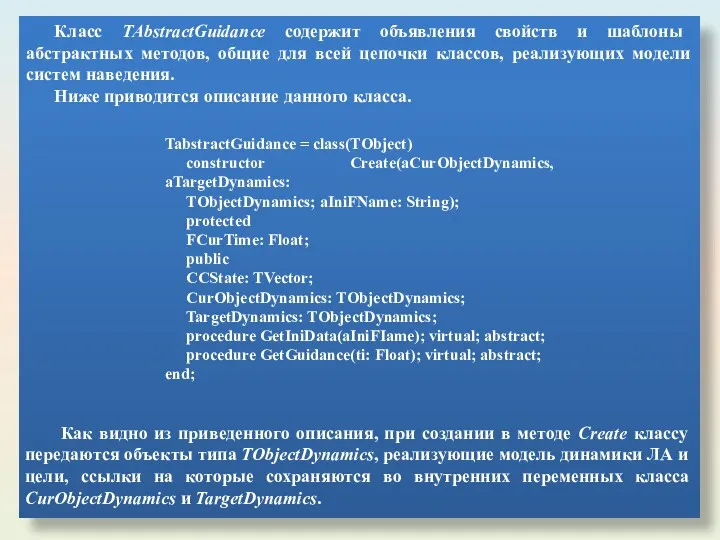
- 65. Класс TAbstractGuidance содержит объявления свойств и шаблоны абстрактных методов, общие для всей цепочки классов, реализующих модели
- 66. Основной метод класса, вычисляющий вектор командного управления ССState на текущий момент времени ti, – процедура GetGuidance.
- 67. Помимо этого, при формировании требуемых перегрузок учитывается ограничение на текущее значение вектора абсолютной угловой скорости ЛА,
- 68. Однако для обсуждаемых ЛА будем использовать единый класс TControlSystem, реализующий модель автопилота как единого механизма, замыкающего
- 69. Как видно из приведенного описания, при создании объекта в методе Create классу передаются объект aCurObjectDynamics типа
- 70. Для реализации динамики звеньев автопилота предусмотрен внутренний объект-интегратор CSIni типа TSimpleAdams. Начальные условия и параметры автопилота
- 71. ВОПРОС 4 Полная объектная структура моделирования
- 72. Были рассмотрены все классы, формализующие блоки функциональной схемы моделирования бортовой интегрированной системы навигации и наведения маневренных
- 73. Все описанные выше объекты являются полями основного класса проекта – ТExperiment. Данный класс предназначен для создания,
- 74. Приведем описание данного класса. TExperiment = class(TObject) constructor Create(const anOwner: Pointer; const acmUpdate: Byte); destructor Destroy;
- 75. Данный класс располагает внутренними полями, представляющими собой объекты от вышеуказанных классов и тремя основными методами, объявленными
- 76. Для старта моделирования вызывается метод Dolt, реализующий непосредственно саму задачу моделирования. В данном методе в цикле
- 77. 5. Вызывается метод DataFusion.Eval(FCurTlme), позволяющий получить оценку ошибок БИНС на основе используемого алгоритма комплексирования. 6. Вызывается
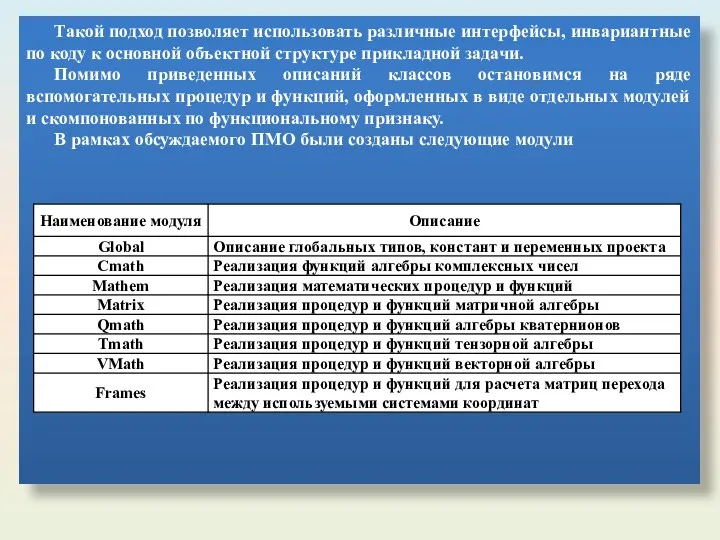
- 78. Такой подход позволяет использовать различные интерфейсы, инвариантные по коду к основной объектной структуре прикладной задачи. Помимо
- 80. Скачать презентацию
Отводимое время на занятие 90 минут
Знать:
моделирование неуправляемого движения летательных аппаратов;
моделирование бортового
Отводимое время на занятие 90 минут
Знать:
моделирование неуправляемого движения летательных аппаратов;
моделирование бортового
1. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных
1. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных
В настоящее время наиболее эффективным подходом к разработке программно-математического обеспечения для
В настоящее время наиболее эффективным подходом к разработке программно-математического обеспечения для
3. Если при моделировании используются сложные численные алгоритмы, требующие большого числа
3. Если при моделировании используются сложные численные алгоритмы, требующие большого числа
5. Если исследуемые процессы обладают вложенностью, (один процесс связан непосредственно или
5. Если исследуемые процессы обладают вложенностью, (один процесс связан непосредственно или

Для построения функциональной схемы ПМО, предназначенного для математического моделирования интегрированных бортовых
Для построения функциональной схемы ПМО, предназначенного для математического моделирования интегрированных бортовых
ВОПРОС 1
Моделирование неуправляемого движения летательных аппаратов
ВОПРОС 1
Моделирование неуправляемого движения летательных аппаратов
Блок "Летательный Аппарат" описывает динамику высокоманевренного беспилотного ЛА (как центра масс,
Блок "Летательный Аппарат" описывает динамику высокоманевренного беспилотного ЛА (как центра масс,
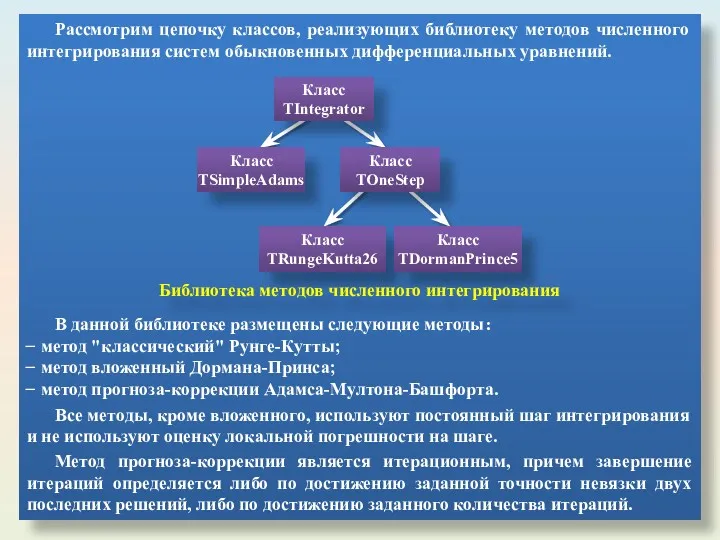
Рассмотрим цепочку классов, реализующих библиотеку методов численного интегрирования систем обыкновенных дифференциальных
Рассмотрим цепочку классов, реализующих библиотеку методов численного интегрирования систем обыкновенных дифференциальных
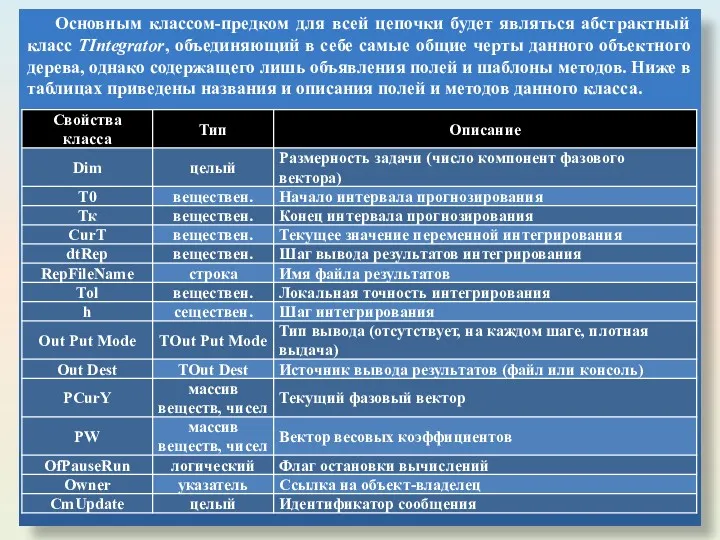
Основным классом-предком для всей цепочки будет являться абстрактный класс ТIntegrator, объединяющий
Основным классом-предком для всей цепочки будет являться абстрактный класс ТIntegrator, объединяющий
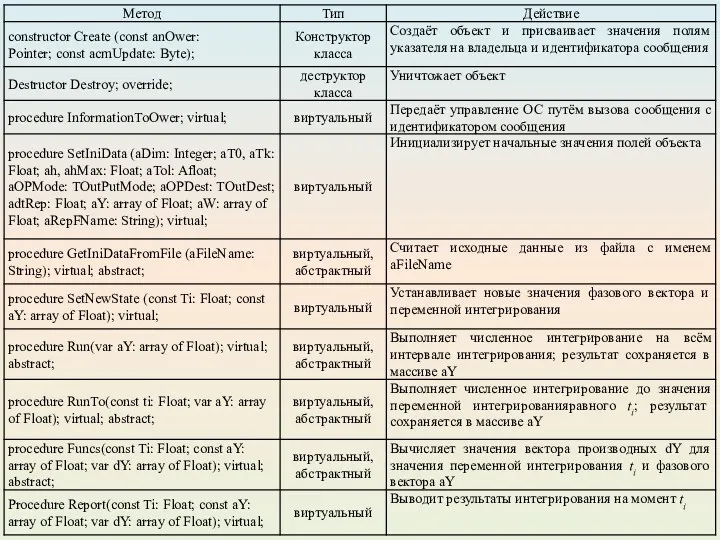
Таким образом в приведенном абстрактном классе представлены основные "обобщенные" черты и
Таким образом в приведенном абстрактном классе представлены основные "обобщенные" черты и
Кроме того, непосредственно от класса TIntegrator образован класс ТSimple Adams, реализующий
Кроме того, непосредственно от класса TIntegrator образован класс ТSimple Adams, реализующий
Часто, особенно в системах ОДУ, в правые части которых входят результаты
Часто, особенно в системах ОДУ, в правые части которых входят результаты
От класса TOneSiep образованы два класса-потомка, реализующих современные одношаговые методы интегрирования
От класса TOneSiep образованы два класса-потомка, реализующих современные одношаговые методы интегрирования
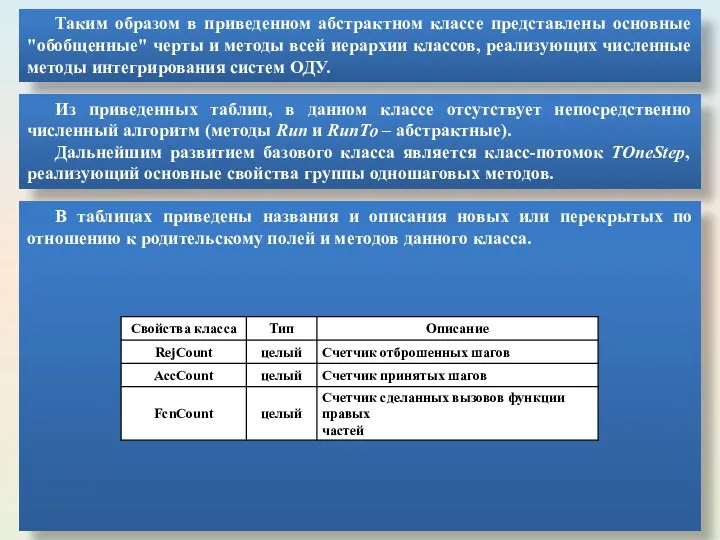
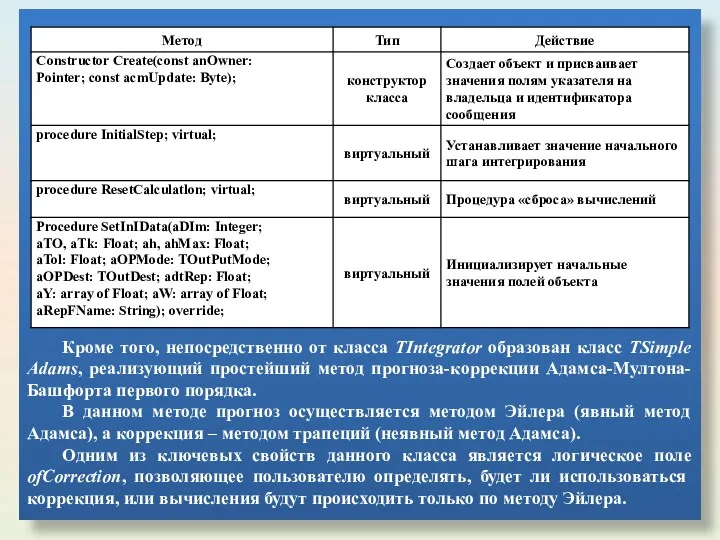
Класс TDormanPrince5 реализует современный вложенный метод численного интегрирования, позволяющий получать на
Класс TDormanPrince5 реализует современный вложенный метод численного интегрирования, позволяющий получать на
Таким образом, формируется библиотека численных методов интегрирования, реализующая наиболее распространенные алгоритмы
Таким образом, формируется библиотека численных методов интегрирования, реализующая наиболее распространенные алгоритмы
Для рассматриваемого ЛА будем полагать, что все массово-инерционные и аэродинамические характеристики
Для рассматриваемого ЛА будем полагать, что все массово-инерционные и аэродинамические характеристики
В данном классе в зависимости от заданных параметров автоматически используется либо
В данном классе в зависимости от заданных параметров автоматически используется либо
Для класса TStatAtmo, потомка класса TPowerPolyAppro, введено дополнительное поле Atmolnfo, содержащее
Для класса TStatAtmo, потомка класса TPowerPolyAppro, введено дополнительное поле Atmolnfo, содержащее
Для учета случайных вариаций параметров атмосферы используется аналогичный описанному класс TStatAtmoDeriv,
Для учета случайных вариаций параметров атмосферы используется аналогичный описанному класс TStatAtmoDeriv,
От базового класса образовано два класса-потомка: TSimpieGravi и TIERSGravi
Схема преобразования
От базового класса образовано два класса-потомка: TSimpieGravi и TIERSGravi
Схема преобразования
Класс TIERSGravi реализует современную модель представления геопотенциала, принятую International Earth Rotation
Класс TIERSGravi реализует современную модель представления геопотенциала, принятую International Earth Rotation
Для беспилотных высокоманевренных ЛА одним из основных возмущающих факторов внешней среды
Для беспилотных высокоманевренных ЛА одним из основных возмущающих факторов внешней среды
Основным свойством данного класса является свойство VWind, вычисляемое методом Get Wind
Основным свойством данного класса является свойство VWind, вычисляемое методом Get Wind
Класс TFlightObject, реализующий модель летательного аппарата, функционально содержит в себе три
Класс TFlightObject, реализующий модель летательного аппарата, функционально содержит в себе три
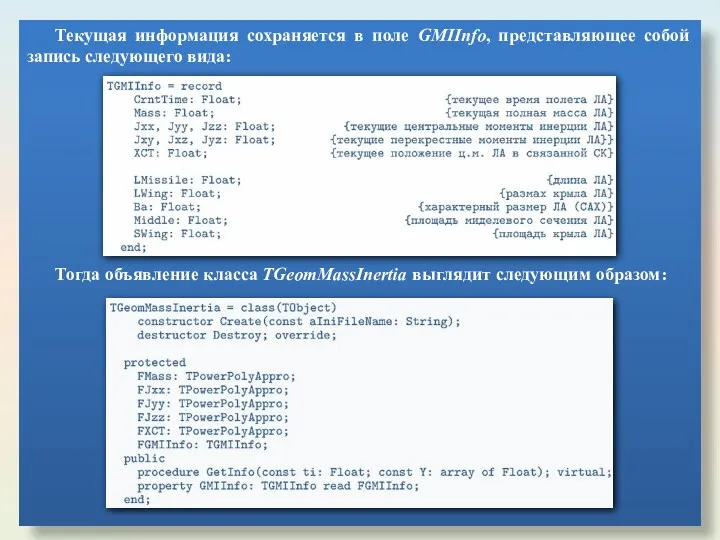
Текущая информация сохраняется в поле GMIInfo, представляющее собой запись следующего вида:
Тогда
Текущая информация сохраняется в поле GMIInfo, представляющее собой запись следующего вида:
Тогда
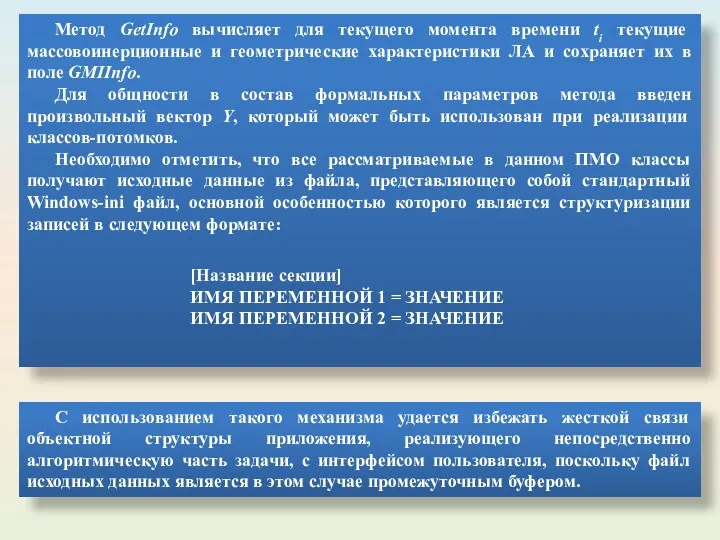
Метод GetInfo вычисляет для текущего момента времени ti текущие массовоинерционные и
Метод GetInfo вычисляет для текущего момента времени ti текущие массовоинерционные и
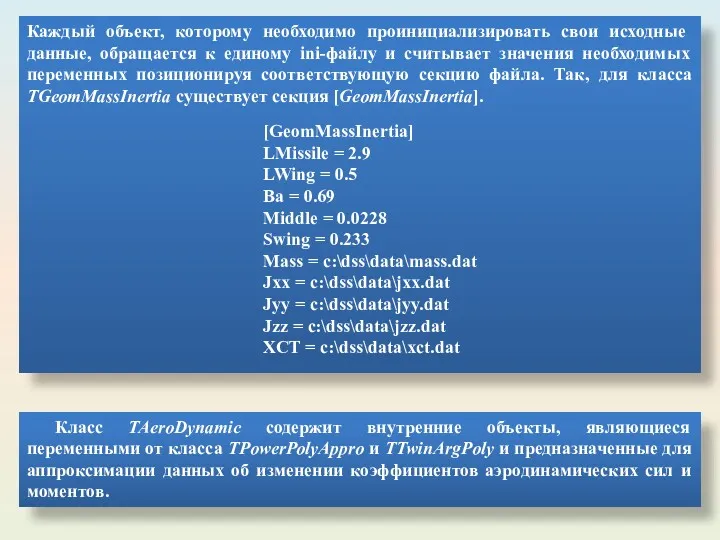
Каждый объект, которому необходимо проинициализировать свои исходные данные, обращается к единому
Каждый объект, которому необходимо проинициализировать свои исходные данные, обращается к единому
Причем, если коэффициент зависит только от одного параметра (например числа Маха
Причем, если коэффициент зависит только от одного параметра (например числа Маха
Для реализации универсальной модели аэродинамики ЛА создана цепочка наследования классов, отображенная
Для реализации универсальной модели аэродинамики ЛА создана цепочка наследования классов, отображенная
Принцип полиморфизма позволяет использовать в классе-владельце (TFlightObject) ссылку на родительский тип
Принцип полиморфизма позволяет использовать в классе-владельце (TFlightObject) ссылку на родительский тип
В таблицах приведены названия и описания полей и методов данного класса.
В таблицах приведены названия и описания полей и методов данного класса.
![Для класса TThruster в ini-файле комплекса существует секция [Thruster]. Как](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/304971/slide-37.jpg)
Для класса TThruster в ini-файле комплекса существует секция [Thruster].
Как видно из
Для класса TThruster в ini-файле комплекса существует секция [Thruster].
Как видно из
![Для класса ТFlightObeject в ini-файле комплекса существует секция [Initial Conditions],](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/304971/slide-38.jpg)
Для класса ТFlightObeject в ini-файле комплекса существует секция [Initial Conditions], задающая
Для класса ТFlightObeject в ini-файле комплекса существует секция [Initial Conditions], задающая
В практике исследований по динамике маневренных ЛА часто разделяют эту систему
В практике исследований по динамике маневренных ЛА часто разделяют эту систему
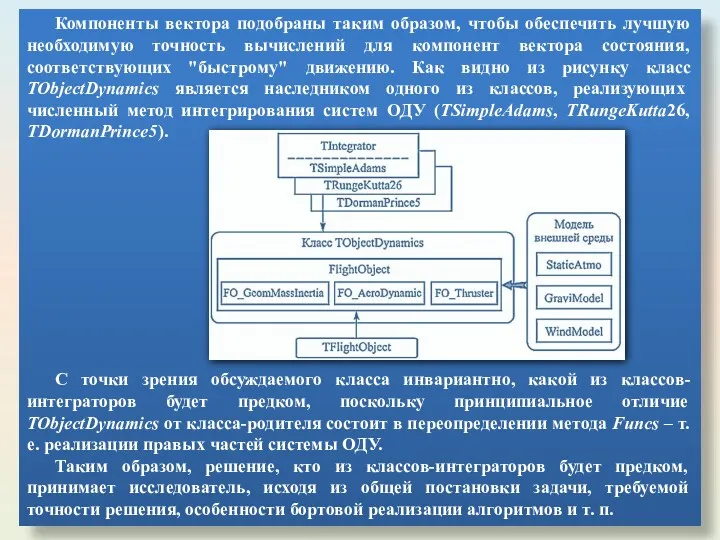
Компоненты вектора подобраны таким образом, чтобы обеспечить лучшую необходимую точность вычислений
Компоненты вектора подобраны таким образом, чтобы обеспечить лучшую необходимую точность вычислений
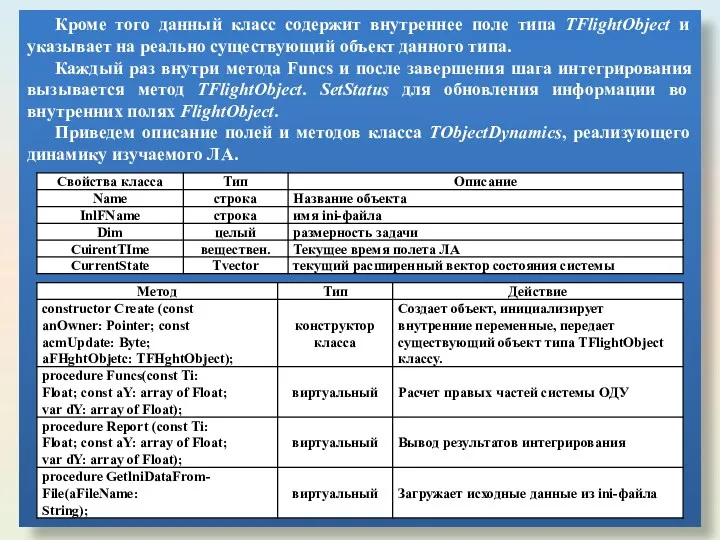
Кроме того данный класс содержит внутреннее поле типа TFlightObject и указывает
Кроме того данный класс содержит внутреннее поле типа TFlightObject и указывает
![Для данного класса в ini-файле комплекса существует секция [Integrator], задающая](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/304971/slide-42.jpg)
Для данного класса в ini-файле комплекса существует секция [Integrator], задающая исходные
Для данного класса в ini-файле комплекса существует секция [Integrator], задающая исходные
ВОПРОС 2
Моделирование бортового измерительного комплекса
ВОПРОС 2
Моделирование бортового измерительного комплекса
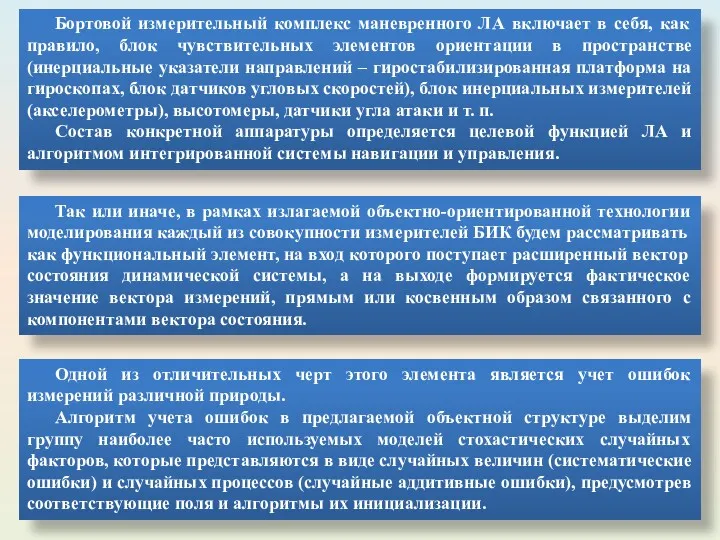
Бортовой измерительный комплекс маневренного ЛА включает в себя, как правило, блок
Бортовой измерительный комплекс маневренного ЛА включает в себя, как правило, блок
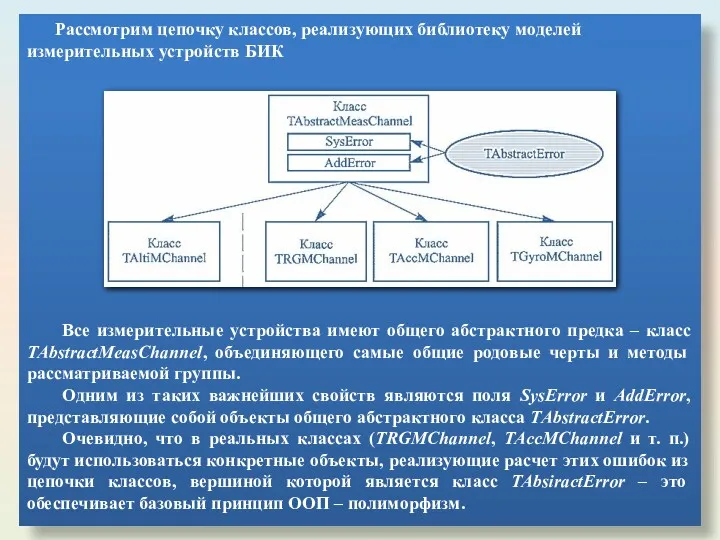
Рассмотрим цепочку классов, реализующих библиотеку моделей измерительных устройств БИК
Все измерительные устройства
Рассмотрим цепочку классов, реализующих библиотеку моделей измерительных устройств БИК
Все измерительные устройства
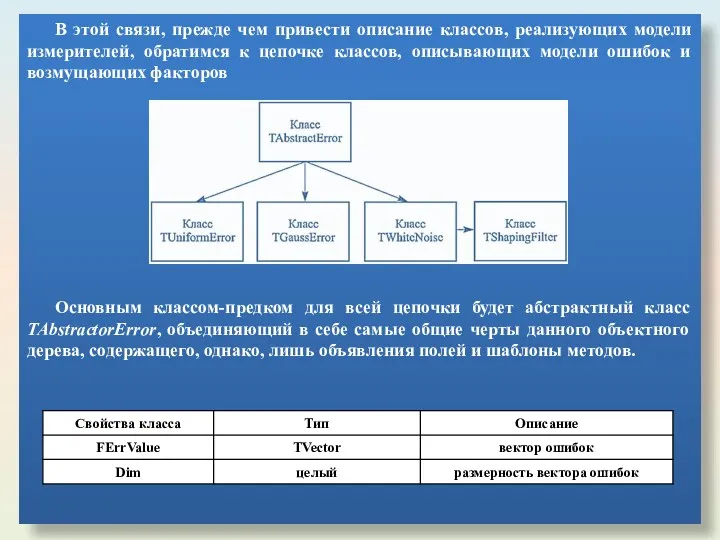
В этой связи, прежде чем привести описание классов, реализующих модели измерителей,
В этой связи, прежде чем привести описание классов, реализующих модели измерителей,
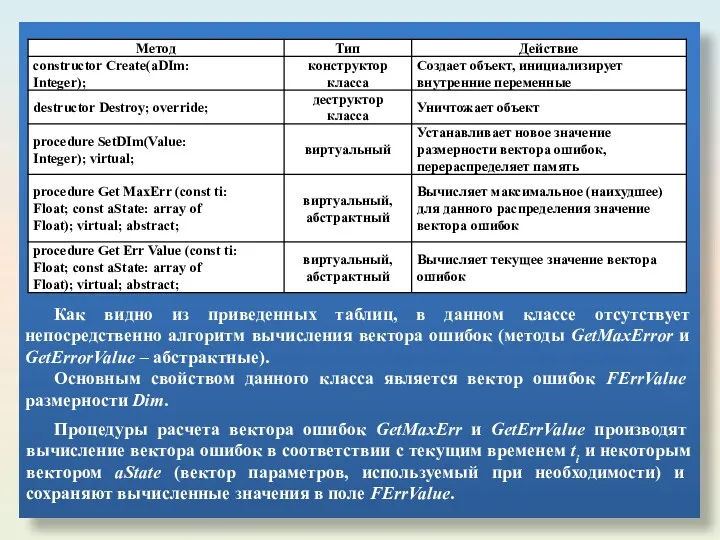
Как видно из приведенных таблиц, в данном классе отсутствует непосредственно алгоритм
Как видно из приведенных таблиц, в данном классе отсутствует непосредственно алгоритм
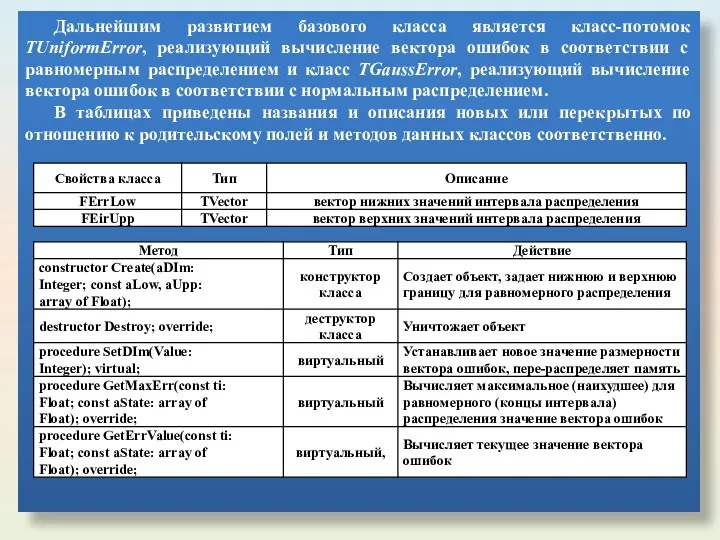
Дальнейшим развитием базового класса является класс-потомок TUniformError, реализующий вычисление вектора ошибок
Дальнейшим развитием базового класса является класс-потомок TUniformError, реализующий вычисление вектора ошибок
Кроме описанных классов от TAbstractError создан класс TWhiteNoise, моделирующий значение векторного
Кроме описанных классов от TAbstractError создан класс TWhiteNoise, моделирующий значение векторного
Ниже, в таблицах приведены названия и описания новых или перекрытых по
Ниже, в таблицах приведены названия и описания новых или перекрытых по
Вызов метода RunTo данного объекта производится в методе GetErrValue до текущего
Вызов метода RunTo данного объекта производится в методе GetErrValue до текущего
Как видно из приведенных таблиц, основным свойством данного класса является поле
Как видно из приведенных таблиц, основным свойством данного класса является поле
В методе Create данного класса инициализируются объекты для учета систематических и
В методе Create данного класса инициализируются объекты для учета систематических и
"Истинные" значения угловой скорости ЛА запрашиваются в методе GetMeas на текущий
"Истинные" значения угловой скорости ЛА запрашиваются в методе GetMeas на текущий
ВОПРОС 3
Моделирование блока навигации и управления
ВОПРОС 3
Моделирование блока навигации и управления
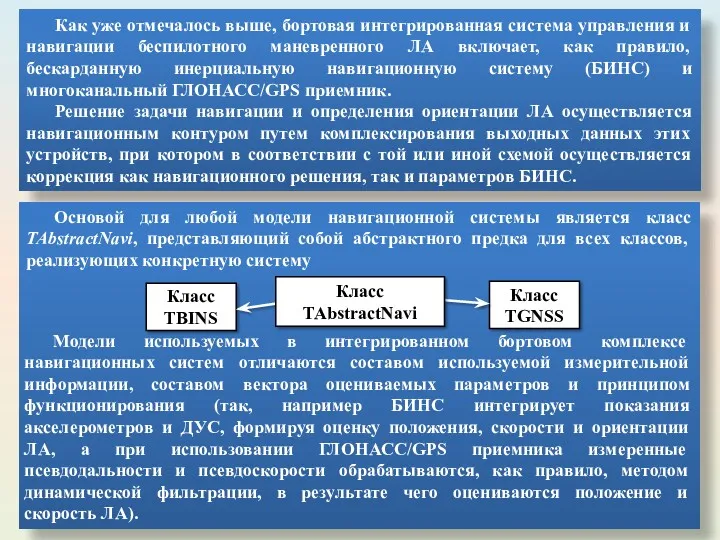
Как уже отмечалось выше, бортовая интегрированная система управления и навигации беспилотного
Как уже отмечалось выше, бортовая интегрированная система управления и навигации беспилотного
Тем не менее, класс TAbstractNavi содержит объявления свойств и шаблоны абстрактных
Тем не менее, класс TAbstractNavi содержит объявления свойств и шаблоны абстрактных
Как видно из приведенных таблиц, основным свойством данного класса является поле
Как видно из приведенных таблиц, основным свойством данного класса является поле
По отношению к классу-предку в TBINS, существует внутренний объект типа ТSimpleAdams,
По отношению к классу-предку в TBINS, существует внутренний объект типа ТSimpleAdams,
Исходные данные для инициализации параметров БИНС (точность интегрирования, шаг, имя файла
Исходные данные для инициализации параметров БИНС (точность интегрирования, шаг, имя файла
Помимо перечисленных навигационных устройств в бортовом интегрированном контуре существует блок комплексирования,
Помимо перечисленных навигационных устройств в бортовом интегрированном контуре существует блок комплексирования,
Как видно из приведенного описания, при создании объекта в методе Create
Как видно из приведенного описания, при создании объекта в методе Create
В зависимости от целевой задачи конкретного ЛА и аппаратных требований могут
В зависимости от целевой задачи конкретного ЛА и аппаратных требований могут
Класс TAbstractGuidance содержит объявления свойств и шаблоны абстрактных методов, общие для
Класс TAbstractGuidance содержит объявления свойств и шаблоны абстрактных методов, общие для
Основной метод класса, вычисляющий вектор командного управления ССState на текущий момент
Основной метод класса, вычисляющий вектор командного управления ССState на текущий момент
Помимо этого, при формировании требуемых перегрузок учитывается ограничение на текущее значение
Помимо этого, при формировании требуемых перегрузок учитывается ограничение на текущее значение

Однако для обсуждаемых ЛА будем использовать единый класс TControlSystem, реализующий модель
Однако для обсуждаемых ЛА будем использовать единый класс TControlSystem, реализующий модель
Как видно из приведенного описания, при создании объекта в методе Create
Как видно из приведенного описания, при создании объекта в методе Create
Для реализации динамики звеньев автопилота предусмотрен внутренний объект-интегратор CSIni типа TSimpleAdams.
Начальные
Для реализации динамики звеньев автопилота предусмотрен внутренний объект-интегратор CSIni типа TSimpleAdams.
Начальные
ВОПРОС 4
Полная объектная структура моделирования
ВОПРОС 4
Полная объектная структура моделирования
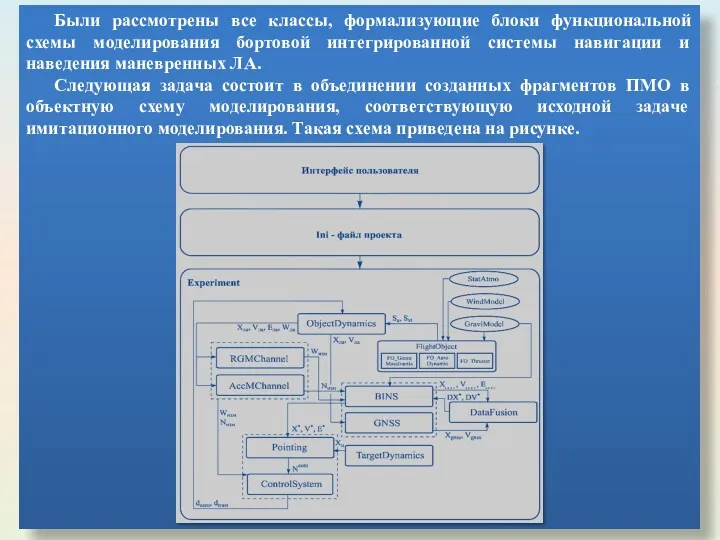
Были рассмотрены все классы, формализующие блоки функциональной схемы моделирования бортовой интегрированной
Были рассмотрены все классы, формализующие блоки функциональной схемы моделирования бортовой интегрированной
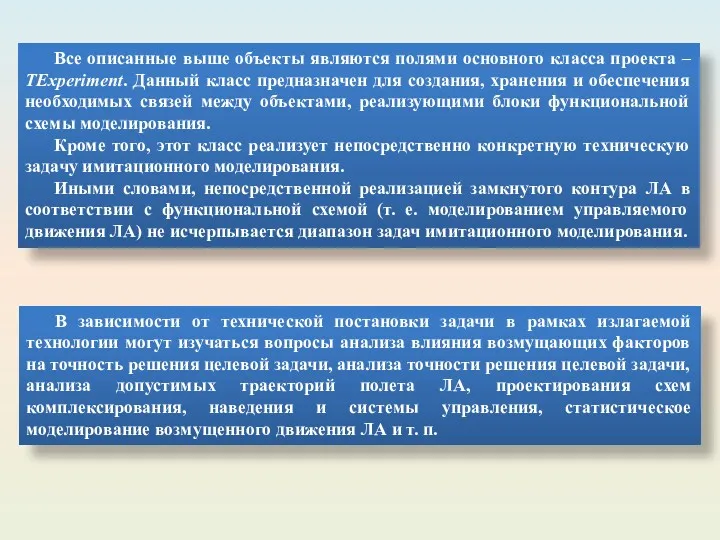
Все описанные выше объекты являются полями основного класса проекта – ТExperiment.
Все описанные выше объекты являются полями основного класса проекта – ТExperiment.
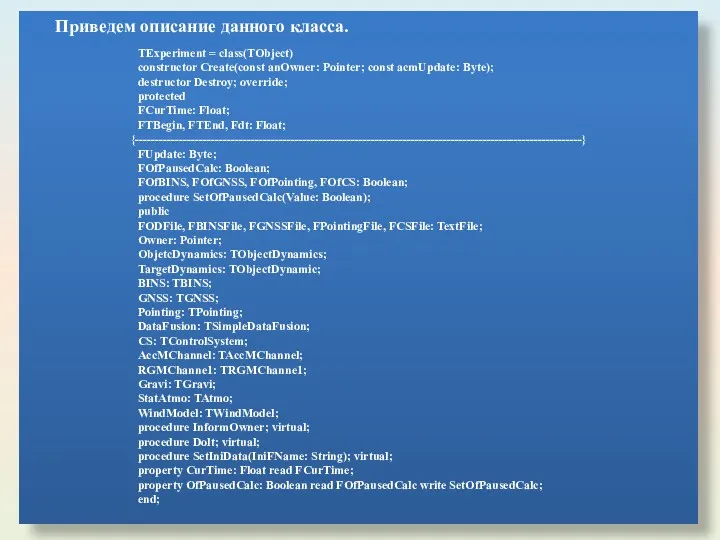
Приведем описание данного класса.
TExperiment = class(TObject)
constructor Create(const anOwner: Pointer; const acmUpdate:
Приведем описание данного класса.
TExperiment = class(TObject)
constructor Create(const anOwner: Pointer; const acmUpdate:
Данный класс располагает внутренними полями, представляющими собой объекты от вышеуказанных классов
Данный класс располагает внутренними полями, представляющими собой объекты от вышеуказанных классов
Для старта моделирования вызывается метод Dolt, реализующий непосредственно саму задачу моделирования.
В
Для старта моделирования вызывается метод Dolt, реализующий непосредственно саму задачу моделирования.
В
5. Вызывается метод DataFusion.Eval(FCurTlme), позволяющий получить оценку ошибок БИНС на основе
5. Вызывается метод DataFusion.Eval(FCurTlme), позволяющий получить оценку ошибок БИНС на основе
Такой подход позволяет использовать различные интерфейсы, инвариантные по коду к основной
Такой подход позволяет использовать различные интерфейсы, инвариантные по коду к основной
 Измерение информации. Алфавитный подход
Измерение информации. Алфавитный подход STEPS. Пользовательская инструкция
STEPS. Пользовательская инструкция Подготовка электронных документов
Подготовка электронных документов Запросы и количество страниц, которые нашел поисковый сервер
Запросы и количество страниц, которые нашел поисковый сервер Продвижение сайта
Продвижение сайта Компьютер и его части. 2 класс
Компьютер и его части. 2 класс Об'єктно-орієнтоване програмування. Принцип інкапсуляції. (Лекція 1)
Об'єктно-орієнтоване програмування. Принцип інкапсуляції. (Лекція 1) Байланыс арналары және желі топологиясы
Байланыс арналары және желі топологиясы Информационное обеспечение управления проектами: состав, структура, характеристики
Информационное обеспечение управления проектами: состав, структура, характеристики Разработка базы данных Магазин
Разработка базы данных Магазин PowerPoint. Учебный курс
PowerPoint. Учебный курс Osi transport layer. Network fundamentals. (Chapter 4)
Osi transport layer. Network fundamentals. (Chapter 4) Регистрация на сайте SPE и получение ID номера
Регистрация на сайте SPE и получение ID номера Носители информации
Носители информации Презентация по информатике Ресурси Інтернет
Презентация по информатике Ресурси Інтернет Цикл типа пока
Цикл типа пока Безопасный интернет
Безопасный интернет Учителя, родители и дети в цифровом пространстве
Учителя, родители и дети в цифровом пространстве Мультипрограмування на основі переривань. Системні виклики. Лекція 2.2
Мультипрограмування на основі переривань. Системні виклики. Лекція 2.2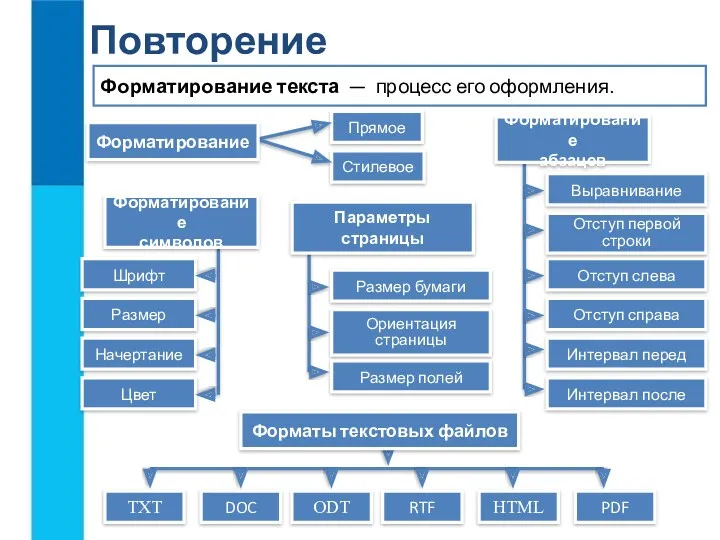 Визуализация информации в текстовых документах
Визуализация информации в текстовых документах Информация, её отбор, виды информации. Сохранение информации с помощью компьютера
Информация, её отбор, виды информации. Сохранение информации с помощью компьютера Управляющие инструкции. C# Introduction. Урок 3
Управляющие инструкции. C# Introduction. Урок 3 Битрикс24
Битрикс24 Классификация ЧМ интерфейсов
Классификация ЧМ интерфейсов Язык создания web-страниц – HTML
Язык создания web-страниц – HTML Инструкция ZOOM. Техническое оснащение вебинара
Инструкция ZOOM. Техническое оснащение вебинара Информационная безопасность
Информационная безопасность История развития вычислительной техники (2 часть)
История развития вычислительной техники (2 часть)