Intel Perceptual Computing SDK для расширения границ взаимодействия людей с ограниченными возможностями с внешним миром (Лекция 2) презентация
- Intel Perceptual Computing SDK для расширения границ взаимодействия людей с ограниченными возможностями с внешним миром (Лекция 2)

Содержание
- 2. Содержание лекции Введение Основы распознавания образов Основы распознавания жестов Intel Perceptual Computing SDK расширения границ взаимодействия
- 3. Введение (1) В современном мире огромная роль отводится информации Людям приходится участвовать в непрерывном информационном обмене
- 4. Введение (2) «Информационная доступность» означает возможность беспрепятственного получения информации вне зависимости от особенных потребностей пользователя.
- 5. Введение (3) Не для всех людей естественное взаимодействие является одинаковым КОММУНИКАТИВНОЕ ЗВЕНО
- 6. Распознавание образов Общие сведения
- 7. Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) - это самая распространенная задача, которую человеку приходится
- 8. Принятие решений В повседневной деятельности человек постоянно сталкивается с задачами, связанными с принятием решений, обусловленных непрерывно
- 10. Применение распознавания образов Большие возможности современной вычислительной техники позволяют в реальном масштабе времени обрабатывать огромное количество
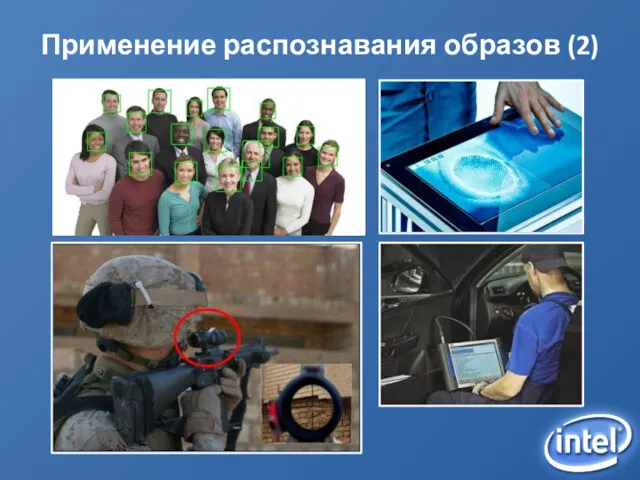
- 11. Применение распознавания образов (2)
- 12. Применение распознавания образов Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) – это задача идентификации объекта
- 13. Методы распознавания образов МЕТОДЫ РАСПОЗНАВАНИЯ ОБРАЗОВ Метод перебора Метод анализа характеристик Использование искусственных нейронных сетей
- 14. Метод перебора Производится сравнение с базой данных, где для каждого вида объектов представлены всевозможные модификации отображения.
- 15. Метод анализа характеристик образа При втором методе производится более глубокий анализ характеристик образа. Примеры, в случае
- 16. Использование искусственных нейронных сетей Нейронная сеть представляет собой машину, моделирующую способ обработки мозгом конкретной задачи В
- 17. Использование искусственных нейронных сетей (2) Искусственная нейронная сеть – это громадный распределенный процессор, состоящий из элементарных
- 18. Использование искусственных нейронных сетей (2) Процедура, используемая для процесса обучения, называется алгоритмом обучения. Процедура обучения выстраивает
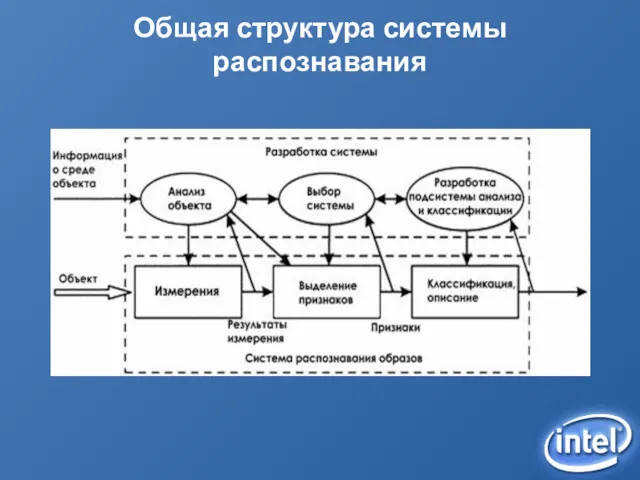
- 19. Общая структура системы распознавания
- 20. Этапы задач распознавания образов 1) преобразование исходных данных к виду, удобному для распознавания; 2) собственно распознавание
- 21. Задачи распознавания образов Распознавание - отнесение предъявленного объекта по его описанию к одному из заданных классов;
- 22. Основы распознавания жестов
- 23. Жест Один из компонентов человеческой речи; Придает речи особую эмоциональность; Для слышащих людей жест – это
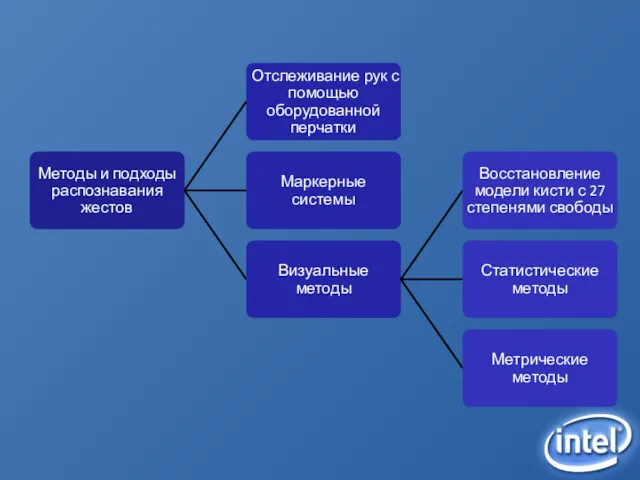
- 25. Отслеживание рук с помощью оборудованной перчатки Оборудованные перчатки, основанные на экзоскелетах, и оснащены более чем десятком
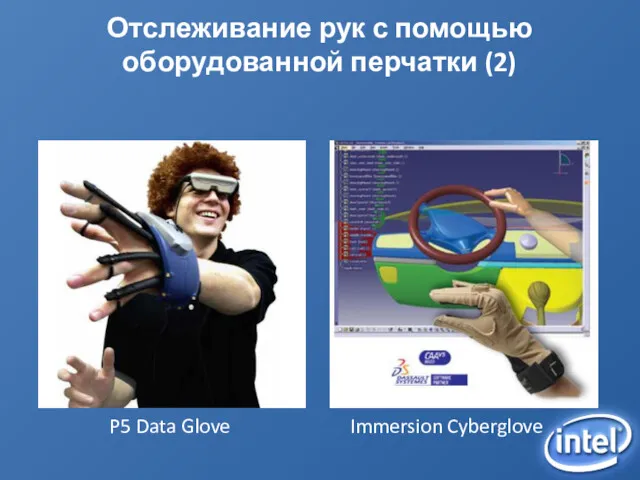
- 26. Отслеживание рук с помощью оборудованной перчатки (2) P5 Data Glove Immersion Cyberglove
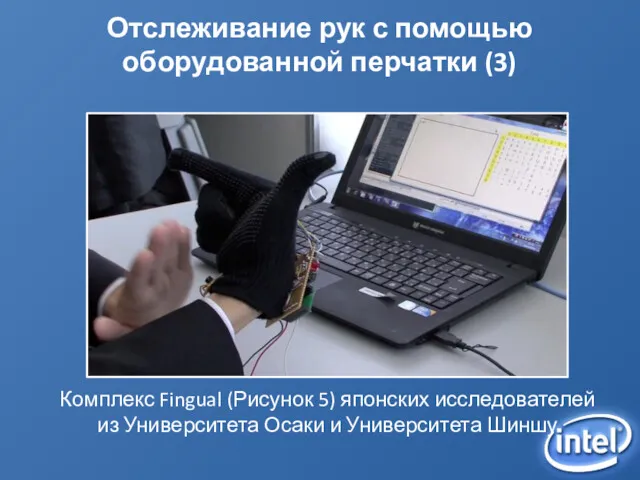
- 27. Отслеживание рук с помощью оборудованной перчатки (3) Комплекс Fingual (Рисунок 5) японских исследователей из Университета Осаки
- 28. Отслеживание рук с помощью оборудованной перчатки (4) Преимущества Обеспечивают высокую точность отслеживания рук и распознавания жестов
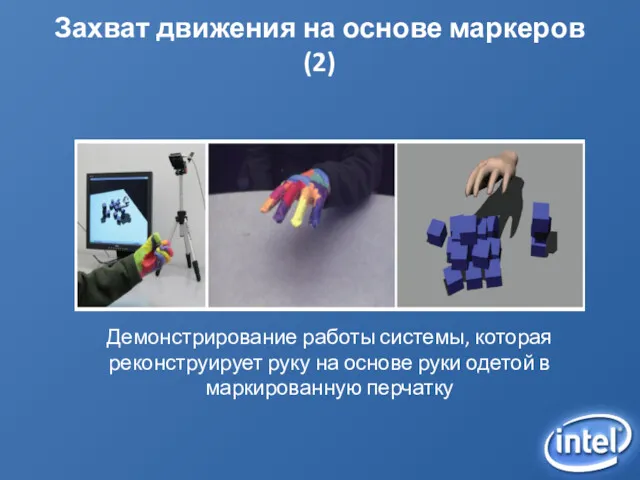
- 29. Захват движения на основе маркеров В основе лежит специальное оборудование; На руку человека прикрепляются датчики; Данные
- 30. Захват движения на основе маркеров (2) Демонстрирование работы системы, которая реконструирует руку на основе руки одетой
- 31. Захват движения на основе маркеров (3) Преимущества Подобные системы ориентированы на точность за счет простоты использования
- 32. Визуальные методы распознавания жестов Визуальные методы распознавания жестов являются наиболее активной и перспективной областью исследований. Отслеживание
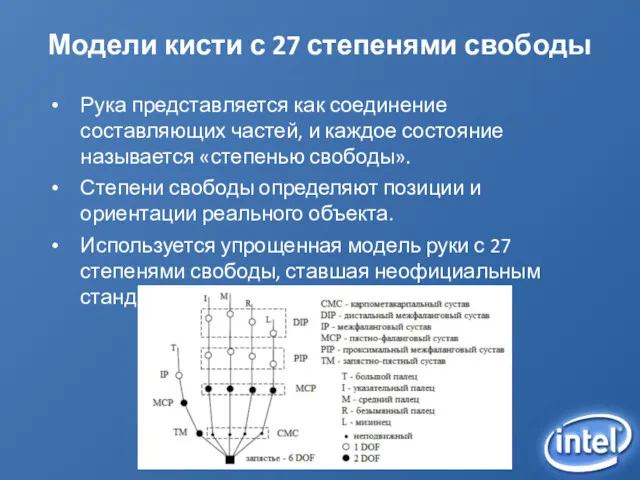
- 33. Модели кисти с 27 степенями свободы Рука представляется как соединение составляющих частей, и каждое состояние называется
- 34. Модели кисти с 27 степенями свободы Системы отслеживания руки в пространстве на основе 3D модели руки
- 35. Статистические методы Предлагают построение признакового описания входного изображения и дальнейшую классификацию жестов именно по этому описанию.
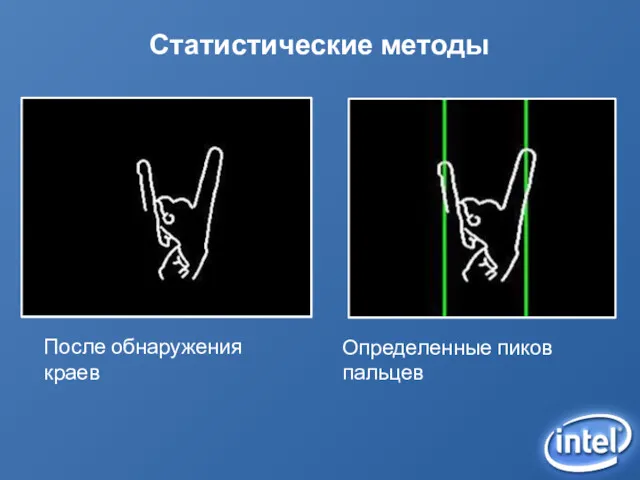
- 36. Статистические методы После обнаружения краев Определенные пиков пальцев
- 37. Метрические методы Предполагают построение некоторой метрики на множестве входных изображений и выполнение классификации за счет сравнения
- 38. Примеры сценариев управление развлекательными приложениями и системами; управление медицинским оборудованием при требованиях стерильности, которые можно удовлетворить
- 39. Примеры сценариев (2)
- 40. Примеры сценариев (3)
- 41. Intel Perceptual Computing SDK расширения границ взаимодействия людей с ограниченными возможностями с внешним миром
- 43. Модуль распознавания жестов (1) Входные потоки:
- 44. Модуль распознавания жестов (2) BLOB Геометрические узлы Распознавание жестов Информационные сообщения 4 типа обработки данных:
- 45. Модуль распознавания жестов (3) BLOB информация представляет результаты промежуточной обработки изображений на входе. Типичные BLOB данные
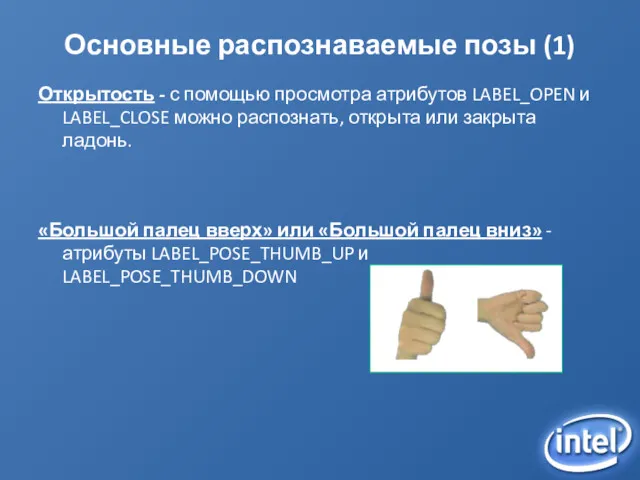
- 46. Основные распознаваемые позы (1) Открытость - с помощью просмотра атрибутов LABEL_OPEN и LABEL_CLOSE можно распознать, открыта
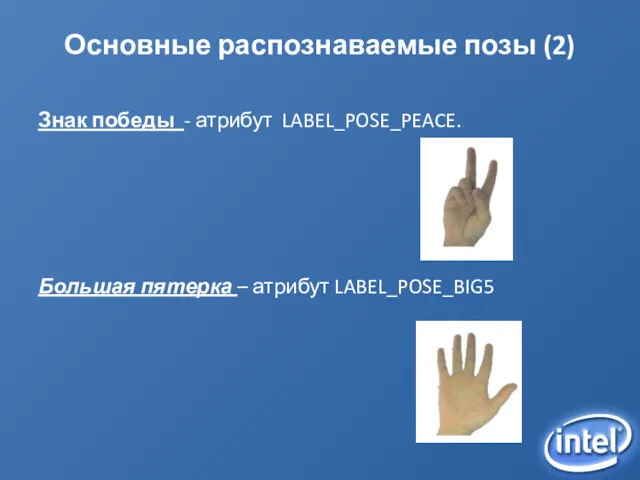
- 47. Основные распознаваемые позы (2) Знак победы - атрибут LABEL_POSE_PEACE. Большая пятерка – атрибут LABEL_POSE_BIG5
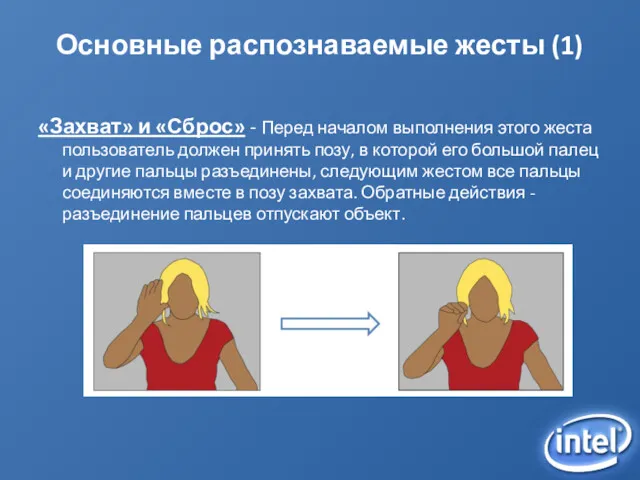
- 48. Основные распознаваемые жесты (1) «Захват» и «Сброс» - Перед началом выполнения этого жеста пользователь должен принять
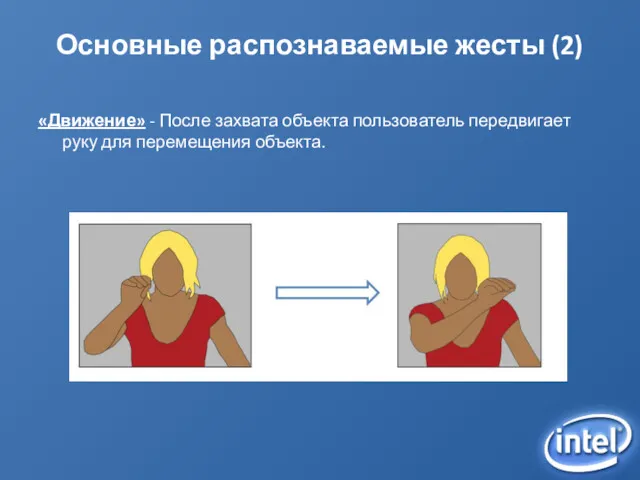
- 49. Основные распознаваемые жесты (2) «Движение» - После захвата объекта пользователь передвигает руку для перемещения объекта.
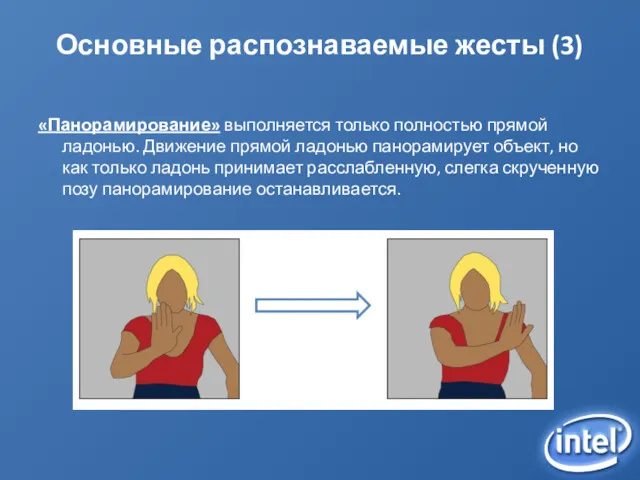
- 50. Основные распознаваемые жесты (3) «Панорамирование» выполняется только полностью прямой ладонью. Движение прямой ладонью панорамирует объект, но
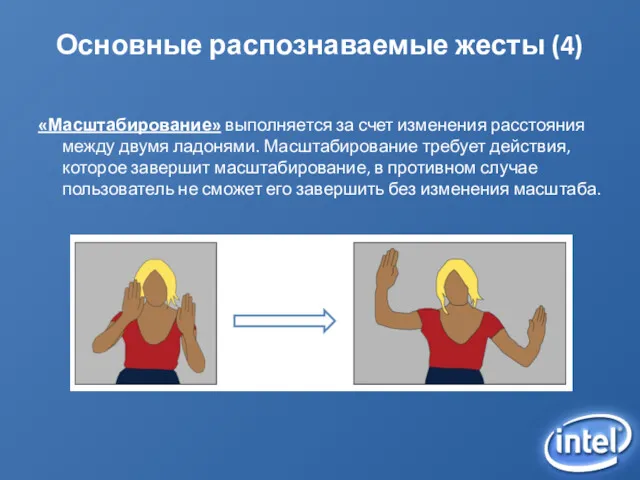
- 51. Основные распознаваемые жесты (4) «Масштабирование» выполняется за счет изменения расстояния между двумя ладонями. Масштабирование требует действия,
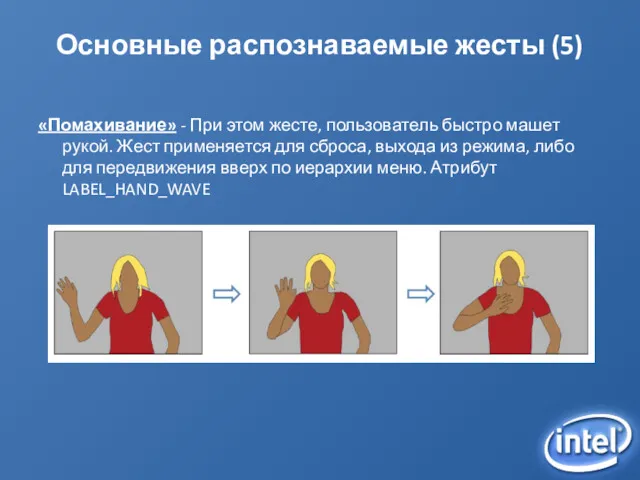
- 52. Основные распознаваемые жесты (5) «Помахивание» - При этом жесте, пользователь быстро машет рукой. Жест применяется для
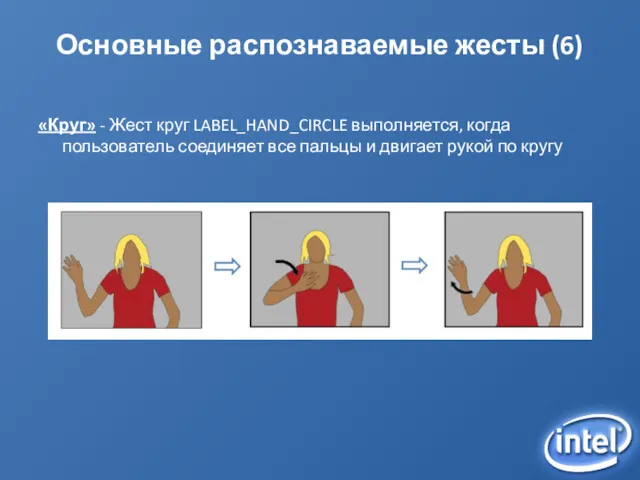
- 53. Основные распознаваемые жесты (6) «Круг» - Жест круг LABEL_HAND_CIRCLE выполняется, когда пользователь соединяет все пальцы и
- 54. Основные распознаваемые жесты (7) «Скольжение» - Скольжение является основным жестом навигации. Различают скольжение как слева направо,
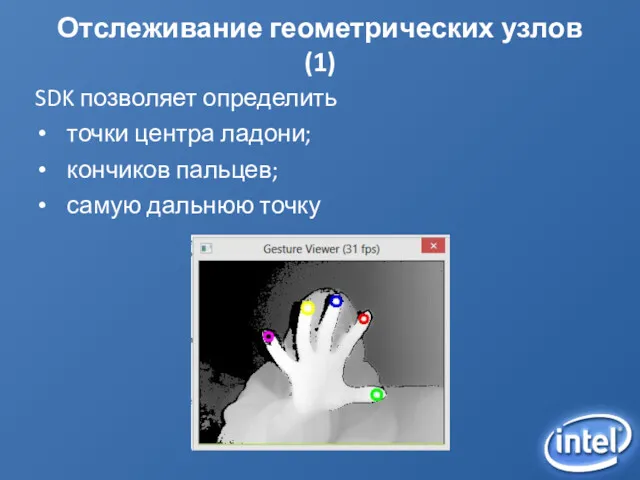
- 55. Отслеживание геометрических узлов (1) SDK позволяет определить точки центра ладони; кончиков пальцев; самую дальнюю точку
- 56. Отслеживание геометрических узлов (2) Для получения координат каждого пальца используется функция QueryNodeData Пример 1: получение координат
- 57. Отслеживание геометрических узлов (3) Детализирующие метки для получения координат других пальцев и центра ладони: PXCGesture::GeoNode::LABEL_FINGER_THUMB –
- 58. Отслеживание геометрических узлов (4) Пример 2: получение координат x и y центра ладони Пример 3: получение
- 60. Скачать презентацию
Содержание лекции
Введение
Основы распознавания образов
Основы распознавания жестов
Intel Perceptual Computing SDK расширения границ
Содержание лекции
Введение
Основы распознавания образов
Основы распознавания жестов
Intel Perceptual Computing SDK расширения границ
Введение (1)
В современном мире огромная роль отводится информации
Людям приходится участвовать в
Введение (1)
В современном мире огромная роль отводится информации
Людям приходится участвовать в
Введение (2)
«Информационная доступность» означает возможность беспрепятственного получения информации вне зависимости от
Введение (2)
«Информационная доступность» означает возможность беспрепятственного получения информации вне зависимости от

Введение (3)
Не для всех людей естественное взаимодействие является одинаковым
КОММУНИКАТИВНОЕ ЗВЕНО
Введение (3)
Не для всех людей естественное взаимодействие является одинаковым
КОММУНИКАТИВНОЕ ЗВЕНО
Распознавание образов Общие сведения
Распознавание образов Общие сведения
Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) - это самая
Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) - это самая

Принятие решений
В повседневной деятельности человек постоянно сталкивается с задачами, связанными с
Принятие решений
В повседневной деятельности человек постоянно сталкивается с задачами, связанными с

Применение распознавания образов
Большие возможности современной вычислительной техники позволяют в реальном масштабе
Применение распознавания образов
Большие возможности современной вычислительной техники позволяют в реальном масштабе
Применение распознавания образов (2)
Применение распознавания образов (2)
Применение распознавания образов
Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) –
Применение распознавания образов
Распознавание образов (объектов, сигналов, ситуаций, явлений или процессов) –
Методы распознавания образов
МЕТОДЫ РАСПОЗНАВАНИЯ ОБРАЗОВ
Метод перебора
Метод анализа характеристик
Использование искусственных нейронных сетей
Методы распознавания образов
МЕТОДЫ РАСПОЗНАВАНИЯ ОБРАЗОВ
Метод перебора
Метод анализа характеристик
Использование искусственных нейронных сетей
Метод перебора
Производится сравнение с базой данных, где для каждого вида объектов
Метод перебора
Производится сравнение с базой данных, где для каждого вида объектов
Метод анализа характеристик образа
При втором методе производится более глубокий анализ характеристик
Метод анализа характеристик образа
При втором методе производится более глубокий анализ характеристик
Использование искусственных нейронных сетей
Нейронная сеть представляет собой машину, моделирующую способ обработки
Использование искусственных нейронных сетей
Нейронная сеть представляет собой машину, моделирующую способ обработки
Использование искусственных нейронных сетей (2)
Искусственная нейронная сеть – это громадный распределенный
Использование искусственных нейронных сетей (2)
Искусственная нейронная сеть – это громадный распределенный
Использование искусственных нейронных сетей (2)
Процедура, используемая для процесса обучения, называется алгоритмом
Использование искусственных нейронных сетей (2)
Процедура, используемая для процесса обучения, называется алгоритмом
Общая структура системы распознавания
Общая структура системы распознавания
Этапы задач распознавания образов
1) преобразование исходных данных к виду, удобному для
Этапы задач распознавания образов
1) преобразование исходных данных к виду, удобному для
Задачи распознавания образов
Распознавание - отнесение предъявленного объекта по его описанию к
Задачи распознавания образов
Распознавание - отнесение предъявленного объекта по его описанию к
Основы распознавания жестов
Основы распознавания жестов
Жест
Один из компонентов человеческой речи;
Придает речи особую эмоциональность;
Для слышащих людей жест
Жест
Один из компонентов человеческой речи;
Придает речи особую эмоциональность;
Для слышащих людей жест
Отслеживание рук с помощью оборудованной перчатки
Оборудованные перчатки, основанные на экзоскелетах, и
Отслеживание рук с помощью оборудованной перчатки
Оборудованные перчатки, основанные на экзоскелетах, и
Отслеживание рук с помощью оборудованной перчатки (2)
P5 Data Glove
Immersion Cyberglove
Отслеживание рук с помощью оборудованной перчатки (2)
P5 Data Glove
Immersion Cyberglove
Отслеживание рук с помощью оборудованной перчатки (3)
Комплекс Fingual (Рисунок 5) японских
Отслеживание рук с помощью оборудованной перчатки (3)
Комплекс Fingual (Рисунок 5) японских
Отслеживание рук с помощью оборудованной перчатки (4)
Преимущества
Обеспечивают высокую точность отслеживания рук
Отслеживание рук с помощью оборудованной перчатки (4)
Преимущества
Обеспечивают высокую точность отслеживания рук

Захват движения на основе маркеров
В основе лежит специальное оборудование;
На руку человека
Захват движения на основе маркеров
В основе лежит специальное оборудование;
На руку человека
Захват движения на основе маркеров (2)
Демонстрирование работы системы, которая реконструирует руку
Захват движения на основе маркеров (2)
Демонстрирование работы системы, которая реконструирует руку
Захват движения на основе маркеров (3)
Преимущества
Подобные системы ориентированы на точность за
Захват движения на основе маркеров (3)
Преимущества
Подобные системы ориентированы на точность за
Визуальные методы распознавания жестов
Визуальные методы распознавания жестов являются наиболее активной и
Визуальные методы распознавания жестов
Визуальные методы распознавания жестов являются наиболее активной и
Модели кисти с 27 степенями свободы
Рука представляется как соединение составляющих
Модели кисти с 27 степенями свободы
Рука представляется как соединение составляющих
Модели кисти с 27 степенями свободы
Системы отслеживания руки в пространстве
Модели кисти с 27 степенями свободы
Системы отслеживания руки в пространстве
Статистические методы
Предлагают построение признакового описания входного изображения и дальнейшую классификацию жестов
Статистические методы
Предлагают построение признакового описания входного изображения и дальнейшую классификацию жестов
Статистические методы
После обнаружения краев
Определенные пиков пальцев
Статистические методы
После обнаружения краев
Определенные пиков пальцев
Метрические методы
Предполагают построение некоторой метрики на множестве входных изображений и выполнение
Метрические методы
Предполагают построение некоторой метрики на множестве входных изображений и выполнение
Примеры сценариев
управление развлекательными приложениями и системами;
управление медицинским оборудованием при требованиях стерильности,
Примеры сценариев
управление развлекательными приложениями и системами;
управление медицинским оборудованием при требованиях стерильности,

Примеры сценариев (2)
Примеры сценариев (2)
Примеры сценариев (3)
Примеры сценариев (3)

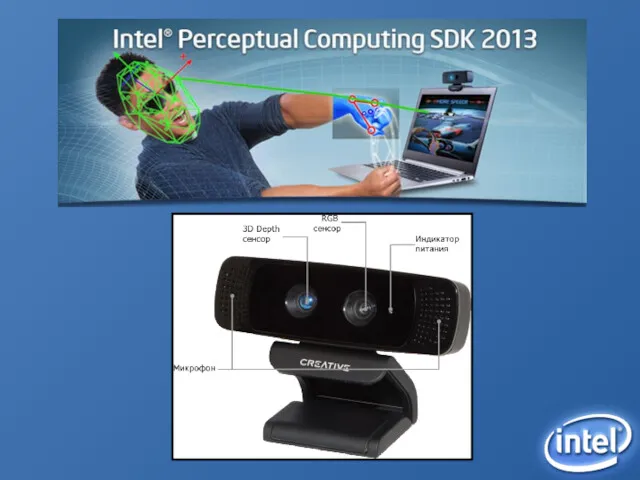
Intel Perceptual Computing SDK расширения границ взаимодействия людей с ограниченными возможностями
Intel Perceptual Computing SDK расширения границ взаимодействия людей с ограниченными возможностями
Модуль распознавания жестов (1)
Входные потоки:
Модуль распознавания жестов (1)
Входные потоки:
Модуль распознавания жестов (2)
BLOB
Геометрические узлы
Распознавание жестов
Информационные сообщения
4 типа обработки данных:
Модуль распознавания жестов (2)
BLOB
Геометрические узлы
Распознавание жестов
Информационные сообщения
4 типа обработки данных:
Модуль распознавания жестов (3)
BLOB информация представляет результаты промежуточной обработки изображений на
Модуль распознавания жестов (3)
BLOB информация представляет результаты промежуточной обработки изображений на
Основные распознаваемые позы (1)
Открытость - с помощью просмотра атрибутов LABEL_OPEN
Основные распознаваемые позы (1)
Открытость - с помощью просмотра атрибутов LABEL_OPEN
Основные распознаваемые позы (2)
Знак победы - атрибут LABEL_POSE_PEACE.
Большая пятерка
Основные распознаваемые позы (2)
Знак победы - атрибут LABEL_POSE_PEACE.
Большая пятерка
Основные распознаваемые жесты (1)
«Захват» и «Сброс» - Перед началом выполнения
Основные распознаваемые жесты (1)
«Захват» и «Сброс» - Перед началом выполнения
Основные распознаваемые жесты (2)
«Движение» - После захвата объекта пользователь передвигает
Основные распознаваемые жесты (2)
«Движение» - После захвата объекта пользователь передвигает
Основные распознаваемые жесты (3)
«Панорамирование» выполняется только полностью прямой ладонью. Движение
Основные распознаваемые жесты (3)
«Панорамирование» выполняется только полностью прямой ладонью. Движение
Основные распознаваемые жесты (4)
«Масштабирование» выполняется за счет изменения расстояния между
Основные распознаваемые жесты (4)
«Масштабирование» выполняется за счет изменения расстояния между
Основные распознаваемые жесты (5)
«Помахивание» - При этом жесте, пользователь быстро
Основные распознаваемые жесты (5)
«Помахивание» - При этом жесте, пользователь быстро
Основные распознаваемые жесты (6)
«Круг» - Жест круг LABEL_HAND_CIRCLE выполняется, когда
Основные распознаваемые жесты (6)
«Круг» - Жест круг LABEL_HAND_CIRCLE выполняется, когда
Основные распознаваемые жесты (7)
«Скольжение» - Скольжение является основным жестом навигации.
Основные распознаваемые жесты (7)
«Скольжение» - Скольжение является основным жестом навигации.
Отслеживание геометрических узлов (1)
SDK позволяет определить
точки центра ладони;
кончиков пальцев;
самую дальнюю точку
Отслеживание геометрических узлов (1)
SDK позволяет определить
точки центра ладони;
кончиков пальцев;
самую дальнюю точку
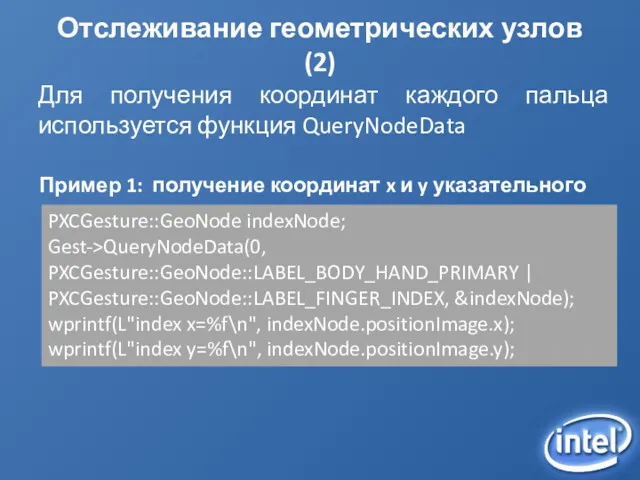
Отслеживание геометрических узлов (2)
Для получения координат каждого пальца используется функция QueryNodeData
Пример
Отслеживание геометрических узлов (2)
Для получения координат каждого пальца используется функция QueryNodeData
Пример
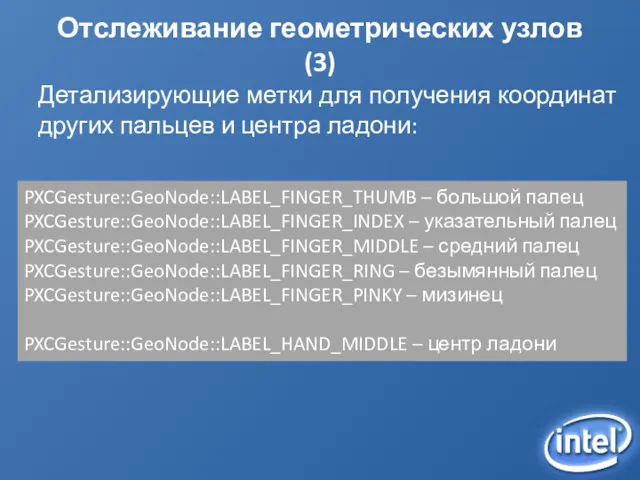
Отслеживание геометрических узлов (3)
Детализирующие метки для получения координат других пальцев и
Отслеживание геометрических узлов (3)
Детализирующие метки для получения координат других пальцев и
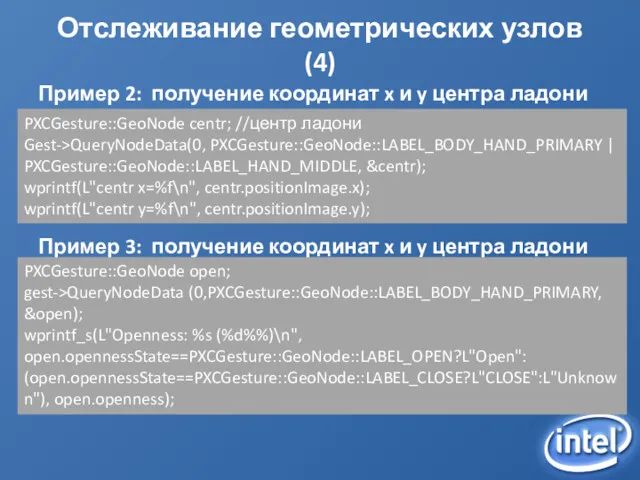
Отслеживание геометрических узлов (4)
Пример 2: получение координат x и y центра
Отслеживание геометрических узлов (4)
Пример 2: получение координат x и y центра
 Ҡодирование и обработка звуковой информации
Ҡодирование и обработка звуковой информации Data Mining - добыча данных, извлечение информации
Data Mining - добыча данных, извлечение информации Дизайн презентаций
Дизайн презентаций Технология программирования
Технология программирования Життєвий цикл розробки ПЗ
Життєвий цикл розробки ПЗ Автоматизация электрического торможения электровозов на затяжном спуске
Автоматизация электрического торможения электровозов на затяжном спуске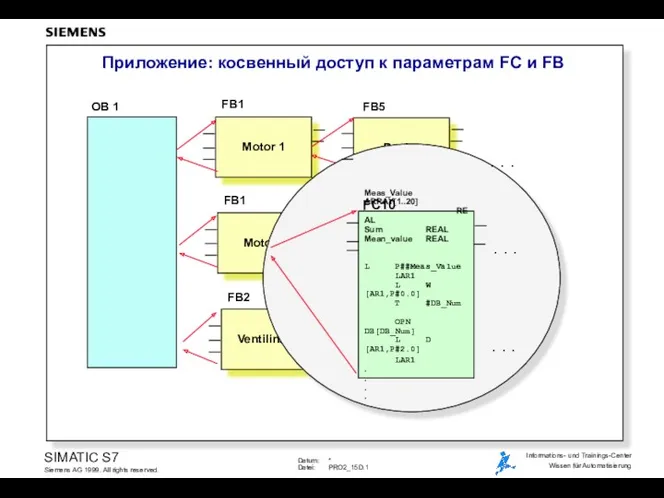 Приложение: косвенный доступ к параметрам FC и FB
Приложение: косвенный доступ к параметрам FC и FB Массивы в C#
Массивы в C# Интернет-воздействие и проблемы трезвости современной молодежи
Интернет-воздействие и проблемы трезвости современной молодежи Брейн ринг по информатике
Брейн ринг по информатике Веб-технологии в образовательной среде для профессионального самоопределения
Веб-технологии в образовательной среде для профессионального самоопределения СЕТИ (ПРОТОКОЛЫ СЕТЕВОГО ВЗАИМОДЕЙСТВИЯ) SOFTWARE
СЕТИ (ПРОТОКОЛЫ СЕТЕВОГО ВЗАИМОДЕЙСТВИЯ) SOFTWARE Плеер Fonmix
Плеер Fonmix Algorithms. Basics of algorithm development
Algorithms. Basics of algorithm development 4 декабря - день информатики в России
4 декабря - день информатики в России Задание №16: рекурсия. Решение через Excel
Задание №16: рекурсия. Решение через Excel Интеграция информационных технологий в обучение математике учащихся 5-х классов общеобразовательной школы
Интеграция информационных технологий в обучение математике учащихся 5-х классов общеобразовательной школы Решение задач ЕГЭ типа В2
Решение задач ЕГЭ типа В2 Текстовый редактор Word
Текстовый редактор Word Лекции по программированию на ассемблере
Лекции по программированию на ассемблере Мультимедиа технологии
Мультимедиа технологии Технологии программирования
Технологии программирования Разграничение прав доступа в сети. Общее дисковое пространство в локальной сети
Разграничение прав доступа в сети. Общее дисковое пространство в локальной сети Кто играл в PACMAN? Какие правила игры?
Кто играл в PACMAN? Какие правила игры? Табличный процессор Microsoft Excel
Табличный процессор Microsoft Excel Введение в SDH
Введение в SDH Урок информатики Табличная форма представления информации
Урок информатики Табличная форма представления информации Система поиска корреляций SmartSCADA
Система поиска корреляций SmartSCADA